简谐振动_旋转矢量法
- 格式:ppt
- 大小:1.67 MB
- 文档页数:59

旋转矢量法在简谐振动中的应用探讨摘要:结合旋转矢量法的理论依据探究旋转矢量法在简谐振动中的应用,探究结果发现:旋转矢量法的理论依据是两个振幅相等,频率相同的简谐振动,相位差等于π/2,沿垂直方向的合成就是圆周运动;而旋转矢量法可计算简谐振动的矢端速度与加速度、相位与初相位、运动时间间隔及合振动。
关键词:旋转矢量法;简谐振动;应用0.旋转矢量法旋转矢量法[1],也叫匀速圆周运动法,参考圆法,用其方法来解决简谐振动中的问题,相对来说比较简单。
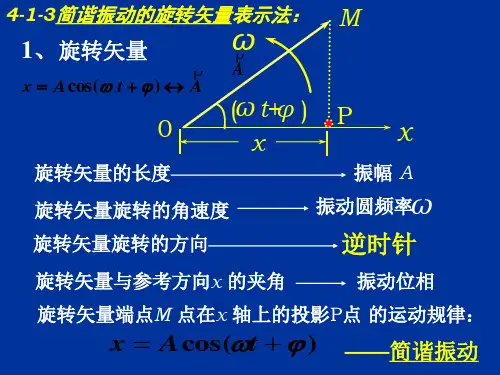
如图1,做一个圆周,以O为原点,向右为正方向建立坐标轴,根据题目条件确定半径位置,要观察的是半径的端点在x轴上的投影的位置,如果速度为正,半径端点一定处于x轴下方,反之在x轴上方,比如,t=0时,质点正经过平衡位置向正方向运动,那么这个半径端点就是在原点正下方,即端点的投影刚好在原点[2]。
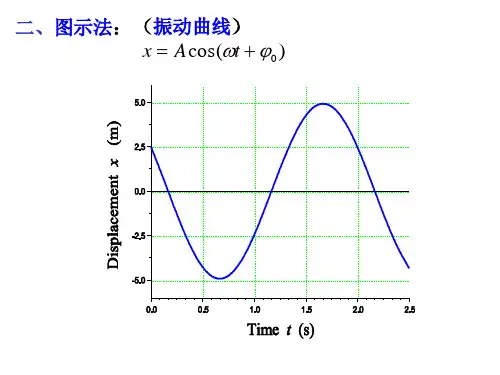
而以O为原点的旋转向量A的端点与在x 轴上的投影点的运动为简谐振动。
图1 旋转矢量图2 相位差为π/2互相垂直简谐振动的合成1.简谐振动矢量法的理论依据互相垂直相同频率简谐振动的合成[3],现将分振动的运动学方程表示为,,质点既沿Ox轴又沿Oy轴运动,实际上是在Oxy平面上运动。
从上面方程消去t,得合振动的轨迹方程:=。
当相位差为时,,表明合振动的轨迹为以x和y为轴的椭圆,如图2所示这里又可分为两种情况,时,x方向的振动比y方向的振动超前,即,当某一瞬时,则x=0,y=A2,即质点在图2(a)中的P点,经过很短时间后略大于零,y将略小于A2,为正,而略大于,x将为负,故质点运动到第二象限,即质点沿椭圆逆时针运动。
反之,时,y方向的振动比x方向的振动超前,质点沿椭圆顺时针方向运动,如图2(b)。
以上两分运动中,若=且相位差为,则其合运动轨迹方程褪化为圆。
两个振幅相等,频率相同的简谐振动,相位差等于沿互相垂直方向合成的为圆周运动;反推理可得,圆周运动亦能分解为两互相垂直的同振幅同频率的简谐振动。

简谐振动的旋转矢量法
简谐振动的旋转矢量法(also known as the rotational vector method)是一种描述简谐振动运动的方法。
这种方法将简谐振动的位移表示为一个旋转矢量,该旋转矢量的大小和方向都随时间变化。
在这种方法中,假设物体在振动过程中绕一个固定轴旋转。
这个固定轴被称为挠度轴,它垂直于振动平面。
振动的位移被表示为从挠度轴指向物体的矢量。
根据简谐振动的性质,位移矢量旋转的角度随时间变化,而角度的变化速率与振动频率相关。
通过将位置矢量的旋转速率与振动频率相关联,可以得到简谐振动的动态方程。
旋转矢量法可以应用于各种简谐振动问题,包括简谐振子、摆线振动等。
通过使用该方法,可以更轻松地分析和计算简谐振动的运动特性,例如位移、速度和加速度等。
此外,该方法还可以用于解决相关问题,如相位差和共振等。
总的来说,简谐振动的旋转矢量法是一种较为直观和简便的分析简谐振动运动的方法,它通过描述位移矢量的旋转来描述振动过程,并可以得到简谐振动的动态方程。
旋转矢量法求初相位例题
旋转矢量法是一种用来求解振动的初相位的方法,下面我们将通过一个例题来解释如何使用旋转矢量法。
假设我们有一个简谐振动的方程为:
y = 3sin(2πt + π/4)
我们需要求解这个振动的初相位。
首先,我们将振动方程转化成复数形式,令:
z = 3e^(j(2πt+π/4))
其中,j为虚数单位。
接下来,我们将振动方程中的时间t代入z中得到:
z(t) = 3e^(j2πt+π/4)
我们将e^(jπ/4)看做一个复数c,即:
c = e^(jπ/4)
c的实部为cos(π/4) = 1/√2,虚部为sin(π/4) = 1/√2。
将c代入z(t)中得到:
z(t) = 3c^2 e^(j2πt)
我们可以将c^2看做一个旋转矢量,表示将复平面上的向量逆时针旋转π/4的角度。
根据旋转矢量的性质,我们可以将z(t)看做是一个振幅为3、角频率为2π的正弦波与一个旋转矢量的乘积。
因此,我们可以得到振动的初相位为π/4。
综上所述,通过旋转矢量法,我们可以求解出简谐振动的初相位,这个方法适用于任何形式的简谐振动。