第8章 前馈-反馈复合控制系统分析与设计 [兼容模式]
- 格式:pdf
- 大小:1.34 MB
- 文档页数:63

引言前馈控制系统和反馈控制系统都属于单回路控制系统,它们有各自的优缺点。
诸如前馈控制能根据干扰值的大小在被调参数偏离给定值之前进行控制,使被调量始终保持在给定值上,但这种控制方式也存在局限,首先表现在前馈控制系统中不存在被调量的反馈,即对于补偿的结果没有检验手段。
反馈控制是根据被调量与给定值的偏差值来控制的,反馈系统的特点是在干扰作用下,必须形成偏差才能进行调节(或偏差即将形成),如果干扰已经发生,而被调参数还没变化时,调节器是不会动作的,即反馈控制总是落后于干扰动作,因此称之为不及时控制。
因此把它们结合起来就产生了前馈—反馈复合控制系统,这种系统能把前馈与反馈的优点结合起来,既能发挥前馈调节控制及时的优点,又能保持反馈控制对各种扰动因素都有抑制作用的长处,较好地解决了控制过程中的问题,通过仿真可以得出这种系统既能获得较好的稳定性,又有较好的抗扰性能。
本设计首先根据设计要求和原始数据补偿传函,然后利用衰减曲线法整定调节器参数,最后在系统动态Simulink结构图和MATLAB软件中进行仿真,得出曲线和相应的结论。
第一章概述1.1自动控制系统的简介1.1.1绪论生产过程中必须保证产品满足一定的数量和质量的要求,同时也要保证生产的安全和经济,这就要求生产过程在预期的工况下进行。
但是,生产过程往往受到各种扰动而偏离正常工况,必须通过自动控制随时消除各种干扰,保证正常运行。
更为严重的是有时自动控制系统本身也要发生故障,这就要求在设计自动控制系统时,考虑各种可能发生的故障,并加以保护。
因此,现代的自动控制系统往往包含自动保护、自动检测、自动报警、顺序控制等内容。
有时,它们有机的组合成一个不可分割的整体,以确保控制系统的安全可靠。
1.1.2 自动控制系统的分类(1)反馈控制系统这种控制系统的基本工作原理是根据被调量与其给定值之间的偏差进行调节,最后达到减小或消除偏差,简单说就是“按偏差调节”。
为了取得偏差信号,必须要有被调量测量值的反馈信号,因而将系统构成一个闭合回路,如图1-1所示。
目录课程设计任务书一、前馈—反馈复合控制系统1.1、前馈—反馈复合控制系统的基本概念 (3)1.2、概念的理解 (3)1.3、前馈—反馈系统的组成.........................................3—4 1.4、前馈—反馈复合控制系统的特点.. (4)1.5、前馈—反馈复合控制系统中前馈前馈控制器的设计 (4)二、控制系统的硬件设计2.1、S7—300系统组成 (4)2.2、CPU315—2DP (4)2.3、模式选择开关…………………………………..…….4—52.4、状态及故障显示 (5)三、控制系统的软件设计3.1、硬件组态 (5)3.2、工程管理器的使用 (6)3.3、新建工程....................................................6—9 3.4、组态监控画面. (9)3.5、组态变量……………………………………………9—10 3.6、软件编程…………………………………………..10—153.7、实验结果分析……………………………………….15—17四、控制系统的调试五、实验总结一、前馈—反馈复合控制系统1.1、前馈—反馈复合控制系统的基本概念前馈—反馈复合控制系统:系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈—反馈复合控制系统。
1.2、概念的理解:(1)复合控制系统是指系统中存在两种不同的控制方式,即前馈、反馈(2)前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器(3)引入反馈控制,是为了是系统能够克服所有的干扰信号对被调量产生的影响,除了已知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是我们能够考虑到的,有的我们肯本就考虑不到或是无法测量,都通过反馈控制来克服。
(4)系统中需要测量的信号既有被调量又有扰动信号。

前馈—反馈复合控制系统第一节前馈控制系统的组成在热工控制系统中,由于被控对象通常存在一定的纯滞后和容积滞后,因而从干扰产生到被调量发生变化需要一定的时间。
从偏差产生到调节器产生控制作用以及操纵量改变到被控量发生变化又要经过一定的时间,可见,这种反馈控制方案的本身决定了无法将干扰对被控量的影响克服在被控量偏离设定植之前,从而限制了这类控制系统控制质量的进一步提高。
考虑到偏差产生的直接原因是干扰作用的结果,如果直接按扰动而不是按偏差进行控制,也就是说,当干扰一出现调节器就直接根据检测到的干扰大小和方法按一定规律去控制。
由于干扰发生后被控量还未显示出变化之前,调节器就产生了控制作用,这在理论上就可以把偏差彻底消除。
按照这种理论构成的控制系统称为前馈控制系统,显然,前馈控制对于干扰的克服要比反馈控制系统及时的多。
从以上分析我们可以得出如下结论:若系统中的调节器能根据干扰作用的大小和方向就对被调介质进行控制来补偿干扰对被调量的影响,则这种控制就叫做前馈控制或扰动补偿。
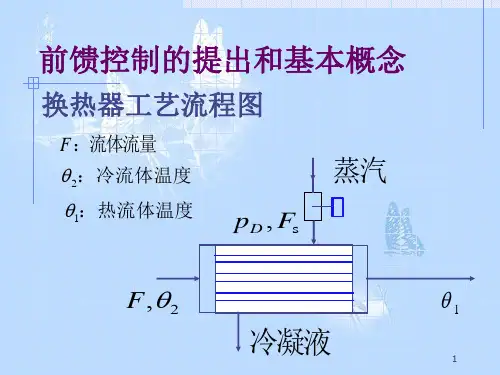
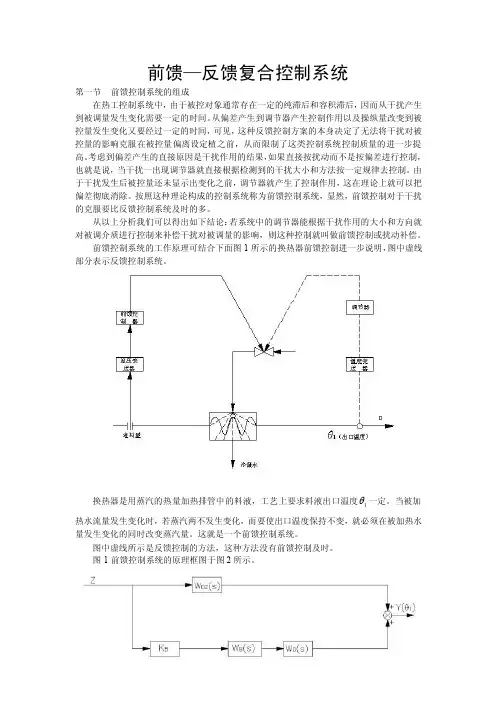
前馈控制系统的工作原理可结合下面图1所示的换热器前馈控制进一步说明,图中虚线部分表示反馈控制系统。
一定。
当被加换热器是用蒸汽的热量加热排管中的料液,工艺上要求料液出口温度1热水流量发生变化时,若蒸汽两不发生变化,而要使出口温度保持不变,就必须在被加热水量发生变化的同时改变蒸汽量。
这就是一个前馈控制系统。
图中虚线所示是反馈控制的方法,这种方法没有前馈控制及时。
图1前馈控制系统的原理框图于图2所示。
图中,B k :测量变送器的变送系数;DZ W (s):干扰通道对象传递函数;D W (s):控制通道对象传递函数;B W (s):前馈控制装置或前馈调节器的传递函数。
第二节 前馈控制系统的特点理想的情况下,针对某种扰动的前馈控制系统能够完全补偿因扰动而引起的对被调量的影响。
实现对干扰完全补偿的关键是确定前馈控制器(前馈调节器)的控制作用,显然B W (s)取决于对象控制通道和干扰通道的特性。
前馈及复合控制一、前馈及复合控制的基本概念在前面讨论的控制系统中,控制器都是按被控参数或其反馈值与给定值的偏差大小进行控制的,这种控制系统称为反馈控制系统.对于反馈控制系统无论是什么干扰引起被控参数的变化,控制器均可根据偏差进行调节,这是其优点;但从干扰产生到被控量发生变化以及偏差产生到控制作用产生,再由控制量改变到被控量发生变化,都需要一定的时间,所以控制总是落后于干扰作用。
由于反馈控制的作用机理决定了无法将干扰克服在被控量偏离设定值之前.因此,对一些滞后较大的对象来说,控制作用总是不及时,从而限制了控制质量的提高.为了解决上述问题,可以采用按扰动直接进行控制,即当扰动一出现,控制器就直接按扰动的性质和大小,以一定规律进行控制,可使被控量还未变化之前,就克服干扰对系统的影响,从而使控制作用提前和控制精度进一步提高。
这种按干扰进行控制的方式称为前馈控制。
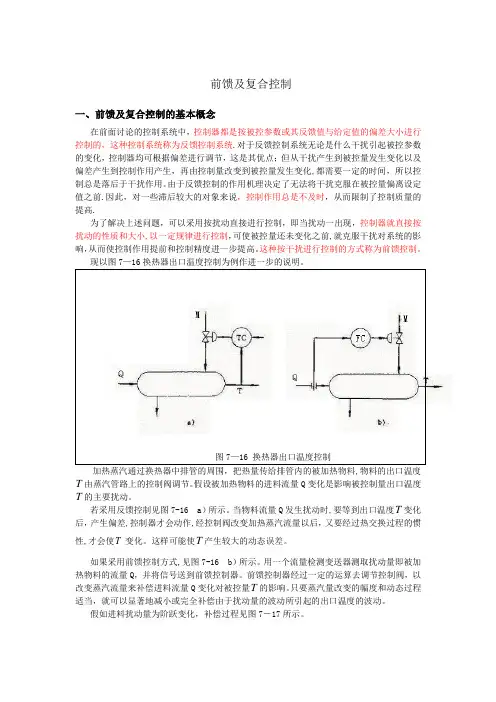
图7—16 换热器出口温度控制加热蒸汽通过换热器中排管的周围,把热量传给排管内的被加热物料,物料的出口温度T由蒸汽管路上的控制阀调节。
假设被加热物料的进料流量Q变化是影响被控制量出口温度T的主要扰动。
若采用反馈控制见图7-16 a)所示。
当物料流量Q发生扰动时,要等到出口温度T变化后,产生偏差,控制器才会动作,经控制阀改变加热蒸汽流量以后,又要经过热交换过程的惯性,才会使T变化。
这样可能使T产生较大的动态误差。
如果采用前馈控制方式,见图7-16 b)所示。
用一个流量检测变送器测取扰动量即被加热物料的流量Q,并将信号送到前馈控制器。
前馈控制器经过一定的运算去调节控制阀,以改变蒸汽流量来补偿进料流量Q变化对被控量T的影响。
只要蒸汽量改变的幅度和动态过程适当,就可以显著地减小或完全补偿由于扰动量的波动所引起的出口温度的波动。
假如进料扰动量为阶跃变化,补偿过程见图7-17所示。
图7—17 前馈控制系统的补偿过程化曲线。
若曲线b与曲线a大小相同,方向相反,则可能实现对扰动量的完全补偿,从而使被控量T与扰动量Q完全无关。
过程控制课程设计--前馈-反馈控制系统的设计与整定北华航天工业学院课程设计报告(论文)设计课题:过程控制专业班级:学生姓名:指导教师:设计时间:201311.25-2013.12.06北华航天工业学院电子工程系过程控制课程设计任务书指导教师:教研室主任:2013年12月6日内容摘要自本世纪30年代以来,自动化技术获得了惊人的成就,已在工业和国民经济各行各业起着关键的作用。
自动化水平已成为衡量各行各业现代化水平的一个重要标志。
自动控制按输入量的变化规律分类,可分恒值控制系统(Fixed Set-Point Control System)、随动控制系统(Follow-up Control System)、过程控制系统(Process Control System)。
前馈-反馈控制系统的设计与整定,采用自动控制技术,实现对水箱液位的过程控制。
首先对被控对象的模型进行分析。
然后,根据被控对象模型和被控过程特性并加入PID调节器设计流量控制系统,采用动态仿真技术对控制系统的性能进行分析。
关键词:自动化过程控制PID目录一概述 (1)二方案设计与论证 (2)2.1 前馈控制 (2)2.2 反馈控制 (2)2.3 前馈-反馈控制 (3)2.4前馈-反馈控制系统PID算法 (4)2.5 控制方案的论证 (5)2.5.1控制方案的可靠性 (5)2.5.2控制方案的安全性 (5)2.5.3控制方案的经济性 (5)三仪表的选择与参数的设定………………………………………………………6 3.1 设备型号 (6)3.2 调节器及其参数的设置 (7)3.3 仪器仪表的组合安装 (8)3.4 计算机的参数设置 (9)四实验步骤…………………………………………………………………………9 五实验结果………………………………………………………………………10 六结论 (11)七心得体会………………………………………………………………………12 八参考文献………………………………………………………………………13一、概述PCT—I型过程控制实验装置是基于工业过程物理模拟对象,它集自动化仪表技术,计算机技术,通讯技术,自动控制技术为一体的多功能实验装置。
一、前馈控制系统设计1、前馈控制系统选择原则1.1扰动量可测不可控原则 (2)1.2控制系统精确辨识原则 (2)1.3被控系统自衡原则 (3)1.4优先性原则 (3)1.5经济性原则 (4)2、工程整定2.1整定的总体原则2.1.1稳定性 (4)2.1.2 快快速性 (5)2.1.3反馈控制的静差 (5)3、前馈-反馈复合系统工程整定 (5)二、实例仿真 (6)2.1前馈控制系统整定 (7)2.2反馈控制系统前向通道稳定性分析 (7)2.3、反馈控制系统整定 (8)2.4、系统仿真 (9)三、................................................. 心得体会11四、................................................. 参考文献12一、前馈控制系统设计1.1前馈控制系统选择原则前馈控制系统的选择主要有一下原则:1.1.1扰动量可测不可控原则扰动量的可测性是补偿的前提条件,不可测的扰动量无法设计前馈补偿器。
如果干扰可控,则可通过控制方法消除扰动对系统的影响,而没有必要采用前馈这种迂回的方式,在被控系统“腹中”消除干扰的影响了。
例如在很多过程控制中,温度是一个主要干扰源。
温度可以测量(直接测量或间接测量),满足可测条件。
而在某些环境如实验室中,温度可以通过空调等进行调节(不满足不可控条件),将温度对控制对象的影响降到最低,这时就没有必要对温度采取前馈控制方式消除影响了。
而在很多现场情况下(如被控对象在室外等),温度不易调节(满足不可控条件),这时应米取前馈控制方式消除由于温度对系统的影响。
1.1.2控制系统精确辨识原则控制中的每一个环节的传递特性都应能精确辨识。
作为开环控制,构成前馈控制系统中的任何一个环节都应尽可能准确,因为开环控制系统中的任何一环节对系统的控制精确度都有一定影响。
相比之下,闭环控制对系统中环节的要求要“松”得多。
前馈控制、反馈控制及前馈-反馈控制的对比1、前馈控制属于开环控制,反馈控制属于负反馈的闭环控制一般定值控制系统是按照测量值与给定值比较得到的偏差进行调节,属于闭环负反馈调节。
其特点是在被控变量出现偏差后才进行调节;如果干扰已经发生而没有产生偏差,调节器不会进行工作。
因此反馈控制方式的调节作用落后于干扰作用。
前馈调节是按照干扰作用来进行调节的。
前馈控制将干扰测量出来并直接引入调节装置,对于干扰的克服比反馈控制及时。
现在以换热器控制方案举例,直观阐述前馈控制和反馈控制:前馈控制方案反馈控制方案2、前馈控制系统中测量干扰量,反馈控制系统中测量被控变量在单纯的前馈控制系统中,不测量被控变量,而单纯的反馈控制系统中不测量干扰量。
3、前馈控制需要专用调节器,反馈控制一般采用通用PID调节器反馈调节符合PID调节规律,常用通用PID调节器、DCS等或PLC控制系统实现。
前馈调节使用的调节器是是根据被控对象的特点来确定调节规律的前馈调节器。
4、前馈控制只能克服所测量的干扰,反馈控制则可克服所有干扰前馈控制系统中若干扰量不可测量,前馈就不可能加以克服。
而反馈控制系统中,任何干扰,只要它影响到被控变量,都能在一定程度上加以克服。
5、前馈控制理论上可以无差,反馈控制必定有差反馈调节使系统达到动态稳定,让被调参数稳定在给定值附近动态变化,却不能使被调参数稳定在给定值上不动。
前馈调节在理论上可以实现无差调节。
6、前馈控制的局限性A、在生产应用中各种环节的特性是随负荷变化的,对象动态特性形式多样性难以精确测量,容易造成过补偿或欠补偿。
为了补偿前馈调节的不准确,通常将前馈和反馈控制系统结合起来组成前馈反馈控制系统。
B、工业对象存在多个扰动,若均设置前馈控制器,那设备投资高,工作量大。
C、很多前馈补偿结果在现有技术条件下没有检测手段。
D、前馈控制受到前馈控制模型精度限制。
E、前馈控制算法,往往做近似处理。
1、系统中存在频率高、幅度大、可测量而不可控的扰动时,可选用前馈控制。
控制系统的反馈与前馈控制技术控制系统是现代工程中不可或缺的一部分,它可以用来控制各种各样的系统,从机械装置到电子设备。
控制系统的设计和实现涉及多种技术和方法。
其中,反馈与前馈控制技术是两种常用的控制策略,它们对于提高系统的稳定性和性能至关重要。
本文将介绍控制系统的反馈和前馈控制技术,以及它们的应用和优势。
一、反馈控制技术反馈控制技术是一种通过测量系统输出并与期望输出进行比较,然后对系统进行调整的控制策略。
反馈控制系统通常包括传感器、控制器和执行器。
传感器用于测量系统的输出,控制器根据输出和期望输出之间的差异来指导执行器的行为。
反馈控制技术的基本原理是根据系统的实际运行情况进行实时调整,以达到期望的控制效果。
反馈控制技术具有许多优势。
首先,它可以对系统的不确定性和外部干扰做出快速响应,并自动调整系统以适应环境变化。
其次,反馈控制技术可以提高系统的稳定性和鲁棒性,减少系统运行过程中的波动和振荡。
最后,反馈控制技术还可以实现对系统输出的精确控制,使系统在不同的工作条件下始终保持期望的性能。
二、前馈控制技术前馈控制技术是一种根据系统输入的参考信号预测系统输出,并根据预测结果进行控制的策略。
前馈控制系统通常包括传感器、预测器和执行器。
传感器用于测量输入信号和系统输出,预测器根据输入信号的特征和系统的数学模型来预测系统输出的未来变化,执行器根据预测结果来调整系统的控制策略。
前馈控制技术的主要优势在于它可以通过提前预测和调整系统来消除输入信号对系统性能的影响。
这种技术可以在系统遇到外部扰动或变化时快速响应,从而提高控制系统的性能。
此外,前馈控制技术还可以减少系统运行过程中的误差和稳态偏差,使系统更加可靠和精确。
三、反馈与前馈控制技术的综合应用在实际控制系统中,反馈与前馈控制技术通常会综合应用,以充分发挥各自的优势。
综合应用反馈与前馈控制技术可以实现更加精确和稳定的控制效果,提高系统的性能和鲁棒性。
在一些高精度、高稳定性要求的系统中,反馈控制技术可以提供及时的误差修正,使系统能够在快速变化的工作环境中保持稳定。
目录课程设计任务书一、前馈—反馈复合控制系统1.1、前馈—反馈复合控制系统的基本概念 (3)1.2、概念的理解 (3)1.3、前馈—反馈系统的组成……………………………….....3—4 1.4、前馈—反馈复合控制系统的特点……………………………..4 1.5、前馈—反馈复合控制系统中前馈前馈控制器的设计………………4 二、控制系统的硬件设计2.1、S7—300系统组成……………………………………....4 2.2、CPU315—2DP (4)2.3、模式选择开关…………………………………..…….4—5 2.4、状态及故障显示 (5)三、控制系统的软件设计3.1、硬件组态.......................................................................5 3.2、工程管理器的使用 (6)3.3、新建工程……………………………….……………6—9 3.4、组态监控画面…………………………………………….9 3.5、组态变量……………………………………………9—10 3.6、软件编程…………………………………………..10—15 3.7、实验结果分析……………………………………….15—17 四、控制系统的调试五、实验总结一、前馈—反馈复合控制系统1.1、前馈—反馈复合控制系统的基本概念前馈—反馈复合控制系统:系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈—反馈复合控制系统。
1.2、概念的理解:(1)复合控制系统是指系统中存在两种不同的控制方式,即前馈、反馈(2)前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器(3)引入反馈控制,是为了是系统能够克服所有的干扰信号对被调量产生的影响,除了已知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是我们能够考虑到的,有的我们肯本就考虑不到或是无法测量,都通过反馈控制来克服。
摘要 可编程序控制器(PLC)是一种集自动化技术、计算机技术和通信技术为一体的高可靠性的工业计算机,应用很广泛,现在已经越来越成熟,小批量、多品种、多规格、低成本和高质量的产品不断涌入市场。
本设计主要是在西门子编程软件S7-300的基础上实现PLC的前馈反馈系统的设计,并通过具体的实例,即对加热炉温度的前馈反馈控制的实现来说明前馈反馈的具体流程。
加热炉内的实时温度经过温度传感器、温度变送器将模拟量传送给PLC的模拟量输入模块,模拟量输入模块将模拟量转换成数字量送到PLC内部处理,再由模拟量输出模块将数字量转换为模拟量输出控制阀门的开度以达到炉内温度稳定的控制。
本文研究的重点是如何用PLC以及WinCC对现场的前馈-反馈控制系统进行控制的,如何将前馈-反馈控制系统得到的数据经过PLC后传送到上位机,用组态软件WinCC进行实时监控。
经仿真运行后,本系统能实现控制要求。
关键字:前馈-反馈控制;可编程控制器;WinCC;加热炉promoted development, and The ability to resolve conflicts and constantly improve, our ... 6. on the building of Socialist culture in China. A country, a nation strong, always supported by culture flourished, the inheritance and development of civilization, without culture to develop and prosper, there will be no realization of the dream of China. 18 big yilai, XI General Secretary around "foster and promote Socialist core values" "promote China excellent traditional culture" "firmly master ideology work led right and discourse right", aspects do has series important speech, main including put publicity thought work do have better for achieved China dream condensed powerful moral support improve national culture soft strength foster and promote Socialist core values youth to consciously practice line Socialist core values Childhood actively cultivate and practice the core values of socialism and the party's important speech on the press conference. 7. promote the reform and development of social undertakings and social management. 18 big yilai, Central insisted put guarantees and improved livelihood as ruling acting political of starting point and foothold, Xia big pneumatic solution masses most care most directly most reality of interests problem, 3 years cumulative reduction poverty more than 50 million people, equivalent to a medium national population of total, annual added town employment more than 10 million people, starts construction supportability housing engineering near 4 million sets, built world Shang scale maximum, and cover universal of basic medical guarantees network and pension guarantees network, urban and rural residents income continued growth, The lives of the people of all ethnic groups have more on both material and spiritual thriving. This aspects XI General Secretary of speech main including promoted poverty area poverty, and speed up development let 1.3 billion people enjoys better more fair of education speed up advance housing guarantees and supply system construction always put people life security put in first bit efforts put China construction became network power insisted general national security views, go China features national security road effective maintenance national security and social settled,. 8. with regard to comprehensive strictly administering the party. Party of 18 big yilai, Central station in party and national survival of height, firmly grasp strengthening party of ruling capacity construction, and advanced purity construction this article mainline, to style construction for breakthrough, to developed introduced eight items provides started start, put discipline and rules is in front, organization carried out has party of mass line education practice activities and "three strict three real" topic education, insisted "zero tolerance, and full cover, and no area", insisted "Tiger" "flies" with playing, style political wind society continued improved, More perfect system of laws within the party, discipline of authoritative seriousness increasing, for the history of winning has a lot of new features provide a strong politicalAbstractProgrammable Logic Controller (PLC) is a set of automation technology, computer technology and communication technology as one of the high reliability industrial computer,and PLC is widely used. Now it is more and more mature,smaller quantities, more kinds ,lower cost and higher quality in the market. This design is abased on the programming software of Siemens to implement PLC-based feedforward-feedback control system. This design introduces an example to explain the procedure of feedforward-feedback system. The example is that through temperature control in heating furnace which is used feedforward and feedback control system.Real-time temperature, inside the furnace, after the temperature sensors, temperature transmitters discovered will be sent to the analog input module of PLC. Analog input modules convert analog to digital, and sent the digital data to CPU of PLC to process. Then analog output modules convert digital to analog to control valve, so the system achieves a stable furnace temperature control. Focus of this study is about that how to use PLC and WINCC to control feedforward-feedback system of on-scene, and how to make feedforward-feedback system convey the date to computer via PLC, then, using configuration software Wincc implement real-time monitoring.Keywords:feedforward-feedback;Programmable Logic Controller;WinCC;heating furnacepromoted development, and The ability to resolve conflicts and constantly improve, our ... 6. on the building of Socialist culture in China. A country, a nation strong, always supported by culture flourished, the inheritance and development of civilization, without culture to develop and prosper, there will be no realization of the dream of China. 18 big yilai, XI General Secretary around "foster and promote Socialist core values" "promote China excellent traditional culture" "firmly master ideology work led right and discourse right", aspects do has series important speech, main including put publicity thought work do have better for achieved China dream condensed powerful moral support improve national culture soft strength foster and promote Socialist core values youth to consciously practice line Socialist core values Childhood actively cultivate and practice the core values of socialism and the party's important speech on the press conference. 7. promote the reform and development of social undertakings and social management. 18 big yilai, Central insisted put guarantees and improved livelihood as ruling acting political of starting point and foothold, Xia big pneumatic solution masses most care most directly most reality of interests problem, 3 years cumulative reduction poverty more than 50 million people, equivalent to a medium national population of total, annual added town employment more than 10 million people, starts construction supportability housing engineering near 4 million sets, built world Shang scale maximum, and cover universal of basic medical guarantees network and pension guarantees network, urban and rural residents income continued growth, The lives of the people of all ethnic groups have more on both material and spiritual thriving. This aspects XI General Secretary of speech main including promoted poverty area poverty, and speed up development let 1.3 billion people enjoys better more fair of education speed up advance housing guarantees and supply system construction always put people life security put in first bit efforts put China construction became network power insisted general national security views, go China features national security road effective maintenance national security and social settled,. 8. with regard to comprehensive strictly administering the party. Party of 18 big yilai, Central station in party and national survival of height, firmly grasp strengthening party of ruling capacity construction, and advanced purity construction this article mainline, to style construction for breakthrough, to developed introduced eight items provides started start, put discipline and rules is in front, organization carried out has party of mass line education practice activities and "three strict three real" topic education, insisted "zero tolerance, and full cover, and no area", insisted "Tiger" "flies" with playing, style political wind society continued improved, More perfect system of laws within the party, discipline of authoritative seriousness increasing, for the history of winning has a lot of new features provide a strong political2目录1 绪论 (1)1.1 国内外研究现状 (1)1.2 本课题研究内容及方法 (2)2 基于PLC的双闭环流量比值控制系统设计 (3)2.1 系统的工艺流程 (3)2.2 控制系统的硬件选型 (4)2.2.1 PLC的发展及特点 (4)2.2.2 PLC的内部结构 (5)2.2.3 西门子公司的S7系列PLC (7)2.2.4 CPU的选型 (8)2.2.5 I/O模块的选型 (8)2.2.6 电源模块的选型 (9)2.3 系统各部分硬件选型 (9)2.3.1 温度传感器的选择 (10)2.3.2 温度变送器的选择 (10)2.3.3 流量计与压力变送器的选择 (10)2.4 软件设计方案 (11)2.4.1 STEP 7编程软件的简介 (11)2.4.2 系统控制方案的选择 (11)2.4.3 加热炉前馈-反馈系统控制流程图 (12)2.4.4 PID控制及其控制算法 (13)2.5 程序的编写 (15)3 WinCC组态与仿真 (20)3.1 新建工程 (20)3.2 建立Wincc与PLC的通信连接 (21)3.3 创建供料系统的过程画面 (25)3.3.1 创建画面 (25)3.3.2 仿真结果 (27)结束语 (33)致谢 (35)参考文献 (36)reform results, economy, and political system, and culture system, and social system, and discipline check system, and party of construction system reform solid advance, tax, and financial, and price, and administrative approval, and State-owned enterprises, and ecological civilization, important field and key link reform made major progress, market in resources configuration in the of decisive role significantly enhanced, Unprecedented burst of momentum and vitality of economic and social development. XI General Secretary's speech in this regard include the reform only when there is no complete, the < decisions of the CPC Central Committee on some major problems in deepening reform > notes on the 18 session of ideas into the party's spirit of the reforms more difficult to move forward, the increasing use of the Socialist system with Chinese characteristics such as the ability to run the country. 4. with regard to promoting sustained and healthy economic development. Face complex changeable of international situation and difficult heavy of domestic reform development stable task, XI General Secretary made China economic development into new normal of science judge, proposed innovation, and coordination, and green, and open, and shared five big development concept, implementation macro policy to stability, and industry policy to associate, and micro policy to live, and reform policy to real, and social policy to backing five big pillar sex policy, vigorously advance supply side structural reform, new concept, achieved has 2013 to 2015 during, Domestic production total annual growth 7.3%, obviously fast Yu earlier world economic 2.3% of annual growth, on world economic growth of contribution over 25%, tertiary industry accounted for domestic production total share over 50%, eventually consumption on economic growth of contribution rate reached 66%, economic structure adjustment made important progress, development of quality and benefits significantly upgrade, China economic show out huge of swing room and broad of development prospects. This aspects XI General Secretary of speech main including economic growth must is real and no water of growth improve open type economic level "see missing of hand" and "see have see of hand" are to with good speed up from elements drive, and investment scale drive development mainly to to innovation drive development mainly of change active promoted China energy production and consumption revolution,. 5. with regard to building the rule of law in China. 18 big yilai, Central tightly around full advance law ruling, put party of led, and people masters, and law ruling organic unified up, insisted law ruling, and law ruling, and law administrative common advance, insisted rule of law national, and rule of law Government, and rule of law socialone construction, full advance science legislation, and strictly law enforcement, and just judicial, and universal law-abiding, China features socialist legal system further sound perfect, leaders at all levels cadres using rule of law thinking and rule of law way deepening reform, and附录 (37)1.完整程序 (37)2.整体仿真画面 (42)promoted development, and The ability to resolve conflicts and constantly improve, our ... 6. on the building of Socialist culture in China. A country, a nation strong, always supported by culture flourished, the inheritance and development of civilization, without culture to develop and prosper, there will be no realization of the dream of China. 18 big yilai, XI General Secretary around "foster and promote Socialist core values" "promote China excellent traditional culture" "firmly master ideology work led right and discourse right", aspects do has series important speech, main including put publicity thought work do have better for achieved China dream condensed powerful moral support improve national culture soft strength foster and promote Socialist core values youth to consciously practice line Socialist core values Childhood actively cultivate and practice the core values of socialism and the party's important speech on the press conference. 7. promote the reform and development of social undertakings and social management. 18 big yilai, Central insisted put guarantees and improved livelihood as ruling acting political of starting point and foothold, Xia big pneumatic solution masses most care most directly most reality of interests problem, 3 years cumulative reduction poverty more than 50 million people, equivalent to a medium national population of total, annual added town employment more than 10 million people, starts construction supportability housing engineering near 4 million sets, built world Shang scale maximum, and cover universal of basic medical guarantees network and pension guarantees network, urban and rural residents income continued growth, The lives of the people of all ethnic groups have more on both material and spiritual thriving. This aspects XI General Secretary of speech main including promoted poverty area poverty, and speed up development let 1.3 billion people enjoys better more fair of education speed up advance housing guarantees and supply system construction always put people life security put in first bit efforts put China construction became network power insisted general national security views, go China features national security road effective maintenance national security and social settled,. 8. with regard to comprehensive strictly administering the party. Party of 18 big yilai, Central station in party and national survival of height, firmly grasp strengthening party of ruling capacity construction, and advanced purity construction this article mainline, to style construction for breakthrough, to developed introduced eight items provides started start, put discipline and rules is in front, organization carried out has party of mass line education practice activities and "three strict three real" topic education, insisted "zero tolerance, and full cover, and no area", insisted "Tiger" "flies" with playing, style political wind society continued improved, More perfect system of laws within the party, discipline of authoritative seriousness increasing, for the history of winning has a lot of new features provide a strong political4广西工学院2011届毕业论文基于PLC的前馈-反馈控制系统的设计1 绪论1.1 国内外研究现状现代社会要求生产厂商能对市场的需求做出迅速反应,生产出小批量、多品种、多规格、低成本和高质量的产品。
摘要可编程序控制器(PLC)是一种集自动化技术、计算机技术和通信技术为一体的高可靠性的工业计算机,应用很广泛,现在已经越来越成熟,小批量、多品种、多规格、低成本和高质量的产品不断涌入市场。
本设计主要是在西门子编程软件S7-300的基础上实现PLC的前馈反馈系统的设计,并通过具体的实例,即对加热炉温度的前馈反馈控制的实现来说明前馈反馈的具体流程。
加热炉内的实时温度经过温度传感器、温度变送器将模拟量传送给PLC的模拟量输入模块,模拟量输入模块将模拟量转换成数字量送到PLC内部处理,再由模拟量输出模块将数字量转换为模拟量输出控制阀门的开度以达到炉内温度稳定的控制。
本文研究的重点是如何用PLC以及WinCC对现场的前馈-反馈控制系统进行控制的,如何将前馈-反馈控制系统得到的数据经过PLC 后传送到上位机,用组态软件WinCC进行实时监控。
经仿真运行后,本系统能实现控制要求。
关键字:前馈-反馈控制;可编程控制器;WinCC;加热炉AbstractProgrammable Logic Controller (PLC) is a set of automation technology, computer technology and communication technology as one of the high reliability industrial computer,and PLC is widely used. Now it is more and more mature,smaller quantities, more kinds ,lower cost and higher quality in the market. This design is abased on the programming software of Siemens to implement PLC-based feedforward-feedback control system. This design introduces an example to explain the procedure of feedforward-feedback system. The example is that through temperature control in heating furnace which is used feedforward and feedback control system.Real-time temperature, inside the furnace, after the temperature sensors, temperature transmitters discovered will be sent to the analog input module of PLC. Analog input modules convert analog to digital, and sent the digital data to CPU of PLC to process. Then analog output modules convert digital to analog to control valve, so the system achieves a stable furnace temperature control. Focus of this study is about that how to use PLC and WINCC to control feedforward-feedback system of on-scene, and how to make feedforward-feedback system convey the date to computer via PLC, then, usingconfiguration software Wincc implement real-time monitoring.Keywords:feedforward-feedback;Programmable Logic Controller; WinCC;heating furnace目录1 绪论 (1)1.1 国内外研究现状 (1)1.2 本课题研究内容及方法 (2)2 基于PLC的双闭环流量比值控制系统设计 (3)2.1 系统的工艺流程 (3)2.2 控制系统的硬件选型 (4)2.2.1 PLC的发展及特点 (4)2.2.2 PLC的内部结构 (5)2.2.3 西门子公司的S7系列PLC (7)2.2.4 CPU的选型 (8)2.2.5 I/O模块的选型 (8)2.2.6 电源模块的选型 (9)2.3 系统各部分硬件选型 (9)2.3.1 温度传感器的选择 (9)2.3.2 温度变送器的选择 (10)2.3.3 流量计与压力变送器的选择 (10)2.4 软件设计方案 (11)2.4.1 STEP 7编程软件的简介 (11)2.4.2 系统控制方案的选择 (11)2.4.3 加热炉前馈-反馈系统控制流程图 (12)2.4.4 PID控制及其控制算法 (13)2.5 程序的编写 (15)3 WinCC组态与仿真 (16)3.1 新建工程 (17)3.2 建立Wincc与PLC的通信连接 (17)3.3 创建供料系统的过程画面 (18)3.3.1 创建画面 (18)3.3.2 仿真结果 (19)结束语 (21)致谢 (22)参考文献 (22)附录 (23)1.完整程序 (23)2.整体仿真画面 (23)1 绪论1.1 国内外研究现状现代社会要求生产厂商能对市场的需求做出迅速反应,生产出小批量、多品种、多规格、低成本和高质量的产品。