摄像机成像几何模型-机器视觉
- 格式:pdf
- 大小:1.74 MB
- 文档页数:11
第30卷 第5期光 学 学 报V ol.30,N o.52010年5月ACTA OPTICA SINICAMay,2010文章编号:0253-2239(2010)05-1297-07摄像机的一种主动视觉标定方法朱 嘉 李醒飞 徐颖欣(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘要 提出了一种快速高精度的摄像机主动视觉标定方法,建立了摄像机模型并详细分析了其各项参数的求解算法。
标定时,令摄像机作一组二维的平移运动,采集圆孔靶标件的图像并计算圆心的像点坐标,同时记录摄像机的移动距离,得到标定所需的特征点。
利用这些特征点计算摄像机标定参数,标定精度可达到0.005mm 。
利用该方法定制的标定模块实现了摄像机的自动标定。
该方法对摄像机运动的限制条件较少,并基本实现了摄像机模型参数的线性求解,为主动视觉系统的摄像机标定提供了一种有效的解决方案。
关键词 机器视觉;摄像机标定;主动视觉;镜头畸变中图分类号 T P391 文献标识码 A do i :10.3788/AOS 20103005.1297Came ra Calibration Technique Base d on Active V isionZhu Jia Li Xingfei Xu Yingxin(Sta te Key L abor a t or y of Pr ecise Measur em en t T echnology an d In str u m en t ,T ia njin Un iver sit y ,T ia njin 300072,Chin a )Abstract A rapid and high -prec ision camera c alibration technique based on active vision is proposed.A c amera m odel and detailed analysis on the solution algorithm of its parameter are established.By in -plane translational motion of the c amera,images of a hollow target plate are collected to c alculate locations of the circular center.Meanwhile,the exact displacements of the c amera a re recorded;therefore the needed coordinates of the feature points in the object plane and in the correlative image plane a re ing these feat ure points,the cam era calibration parameters can be ca lculated with a precision of 0.005mm.Finally,automatic c alibration is realized by use of the custom ca libration module.The proposed method with less limiting conditions of c amera motion ba sic ally realizes linear solution of the para meters of camera model,and provides an effective solution of c amera calibration for active vision systems.Key wo rds machine vision;camera calibration;active vision;lens distortion收稿日期:2009-04-30;收到修改稿日期:2009-06-26作者简介:朱 嘉(1982)),男,博士研究生,主要从事数字图像处理、测试计量技术及仪器等方面的研究。

机器视觉系统视觉检测技术是精密测试技术领域内最具有发展潜力的新技术,它综合运用了电子学、光电探测、图象处理和计算机技术,将机器视觉引入到工业检测中,实现对物体(产品或零件)三维尺寸或位置的快速测量,具有非接触、速度快、柔性好等突出优点,在现代制造业中有着重要的应用前景。
图1-1 视觉检测一.机器视觉简介美国机器人工业协会(RIA Robotic Industries Association)的自动化对机器视觉下的定义为:机器视觉(Machine Vision)是指光学的装置和非接触的传感器自动的接受和处理一个真实物体的图像,通过分析图像获得所需信息或用于控制机器运动的装置。
机器视觉主要由视觉传感器(如工业相机)代替人眼获取客观事物的图像,利用计算机来模拟人或再现与人类视觉有关的某些职能行为,从图像中提取信息,并进行处理与分析,最终用于实际的检测、测量与控制。
图1-2 机器视觉机构图机器视觉的应用主要有检测和机器人视觉两个方面:⒈检测:又可分为高精度定量检测(例如显微照片的细胞分类、机械零部件的尺寸和位置测量)和不用量器的定性或半定量检测(例如产品的外观检查、装配线上的零部件识别定位、缺陷性检测与装配完全性检测)。
⒉机器人视觉:用于指引机器人在大范围内的操作和行动,如从料斗送出的杂乱工件堆中拣取工件并按一定的方位放在传输带或其他设备上(即料斗拣取问题)。
至于小范围内的操作和行动,还需要借助于触觉传感技术。
二.机器视觉系统典型的机器视觉系统:光源,镜头,相机,图像处理单元(图像捕获卡),图像处理软件,监视器,通信/输入输出单元等。
机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
图2-1 机器视觉检测流程图2.1光源光源是影响机器视觉系统图像质量的重要因素,照明对输入数据的影响至少占到30%。
第一章机器视觉系统构成与关键技术1、机器视觉系统一般由哪几部分组成?机器视觉系统应用的核心目标是什么?主要的分成几部分实现?用机器来延伸或代替人眼对事物做测量、定位和判断的装置。
组成:光源、场景、摄像机、图像卡、计算机。
用机器来延伸或代替人眼对事物做测量、定位和判断。
三部分:图像的获取、图像的处理和分析、输出或显示。
2、图像是什么?有那些方法可以得到图像?图像是人对视觉感知的物质再现。
光学设备获取或人为创作。
3、采样和量化是什么含义?数字化坐标值称为取样,数字化幅度值称为量化。
采样指空间上或时域上连续的图像(模拟图像)变换成离散采样点(像素)集合的操作;量化指把采样后所得的各像素的灰度值从模拟量到离散量的转换。
采样和量化实现了图像的数字化。
4、图像的灰度变换是什么含义?请阐述图像反色算法原理?灰度变换指根据某种目标条件按照一定变换关系逐点改变原图像中每一个像素灰度值,从而改善画质,使图像的显示效果更加清晰的方法。
对于彩色图像的R、G、B各彩色分量取反。
第二章数字图像处理技术基础1、对人类而言,颜色是什么?一幅彩色图像使用RGB色彩空间是如何定义的?24位真彩色,有多少种颜色?对人类而言,在人类的可见光范围内,人眼对不同波长或频率的光的主观感知称为颜色。
一幅图像的每个像素点由24位编码的RGB 值表示:使用三个8位无符号整数(0 到255)表示红色、绿色和蓝色的强度。
256*256*256=16,777,216种颜色。
2、红、绿、蓝三种颜色为互补色,光照在物体上,物体只反射与本身颜色相同的色光而吸收互补色的光。
一束白光照到绿色物体上,人类看到绿色是因为?该物体吸收了其他颜色的可见光,而主要反射绿光,所以看到绿色。
3、成像系统的动态范围是什么含义?动态范围最早是信号系统的概念,一个信号系统的动态范围被定义成最大不失真电平和噪声电平的差。
而在实际用途中,多用对数和比值来表示一个信号系统的动态范围,比如在音频工程中,一个放大器的动态范围可以表示为:D = lg(Power_max / Power_min)×20;对于一个底片扫描仪,动态范围是扫描仪能记录原稿的灰度调范围。
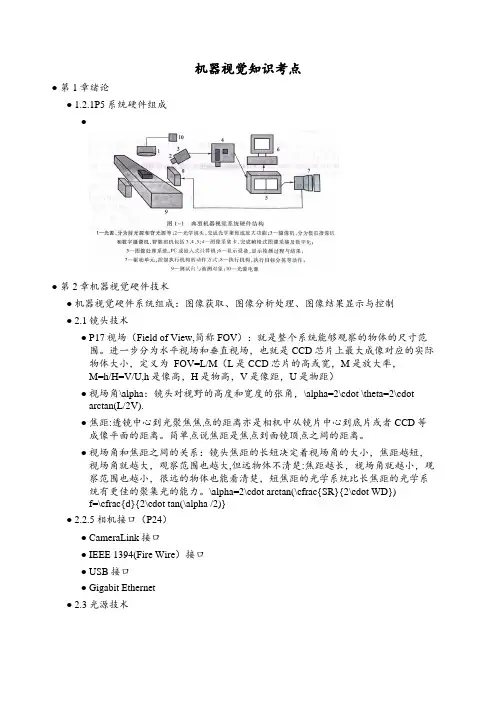
机器视觉知识考点●第1章绪论●1.2.1P5系统硬件组成●●第2章机器视觉硬件技术●机器视觉硬件系统组成:图像获取、图像分析处理、图像结果显示与控制●2.1镜头技术●P17视场(Field of View,简称FOV):就是整个系统能够观察的物体的尺寸范围。
进一步分为水平视场和垂直视场,也就是CCD芯片上最大成像对应的实际物体大小,定义为 FOV=L/M(L是CCD芯片的高或宽,M是放大率,M=h/H=V/U,h是像高,H是物高,V是像距,U是物距)●视场角\alpha:镜头对视野的高度和宽度的张角,\alpha=2\cdot \theta=2\cdotarctan(L/2V).●焦距:透镜中心到光聚焦焦点的距离亦是相机中从镜片中心到底片或者CCD等成像平面的距离。
简单点说焦距是焦点到面镜顶点之间的距离。
●视场角和焦距之间的关系:镜头焦距的长短决定着视场角的大小,焦距越短,视场角就越大,观察范围也越大,但远物体不清楚:焦距越长,视场角就越小,观察范围也越小,很远的物体也能看清楚,短焦距的光学系统比长焦距的光学系统有更佳的聚集光的能力。
\alpha=2\cdot arctan(\cfrac{SR}{2\cdot WD})f=\cfrac{d}{2\cdot tan(\alpha /2)}●2.2.5相机接口(P24)●CameraLink接口●IEEE 1394(Fire Wire)接口●USB接口●Gigabit Ethernet●2.3光源技术●前光源:前光式照明主要应用于检测反光与不平整表面,如检测IC芯片上的印刷字符、电路板元件、焊点、橡胶类制品、封盖标记、包装袋标记、封盖内部以及底部的脏污等。
●背光源:主要应用于被测对象的轮廓检测透明体的污点缺陷检测、液晶文字检查、小型电子元件尺寸和外形检测、轴承外观和尺寸检查、半导体引线框外观和尺寸检查等。
●环形光源:环形光源对检测高反射材料表面的缺陷极佳,非常适合电路板和BGA(球栅阵列封装)缺陷的检测。
相机成像模型公式
【原创版】
目录
1.相机成像模型公式介绍
2.相机成像模型公式的组成部分
3.相机成像模型公式的实际应用
正文
1.相机成像模型公式介绍
相机成像模型公式是数字图像处理领域的基础公式之一,它可以帮助我们理解相机如何将物理世界中的光线转换为数字图像。
这个公式描述了光线如何通过相机的镜头和传感器,最终形成图像的过程。
2.相机成像模型公式的组成部分
相机成像模型公式主要包括以下几个部分:
- 光线:光线是物理世界中的电磁波,它在特定的时间和空间位置上具有一定的强度和方向。
- 镜头:镜头是将光线折射并聚焦到传感器上的透明玻璃片。
它的主要参数包括焦距、光圈和畸变等。
- 传感器:传感器是将光线转换为数字信号的芯片,通常是由光敏元件组成的阵列。
- 像素:像素是图像的基本单元,它由传感器上的一个光敏元件对应。
像素的值通常表示该点光线的强度。
3.相机成像模型公式的实际应用
相机成像模型公式在实际应用中有广泛的应用,包括图像处理、计算机视觉和机器学习等领域。
通过这个公式,我们可以理解图像的物理属性,如亮度、对比度和清晰度等,从而对图像进行有效的处理和分析。
第1页共1页。
多方法融合的相机内参数标定方法研究孟明辉王星凯沈紫妍刘卓彭佳仪张竹重庆科技学院机械与动力工程学院,重庆401331摘要:相机标定是确定世界坐标系下三维空间点与像素平面像素点间的转换关系,是机器视觉测量的关键步骤。
针对相机测量场景、条件不同,文章通过研究DLT标定法、Tsai标定法以及张正友法标定法三种标定方法,结合三种标定方法的优缺点,筛选契合的相机标定方法,并根据标定结果反馈不断优化标定计算结果,提升相机内参数标定效率及标定准确度。
采用多方法融合的相机内参数标定算法可以提高相机标定的效率,并降低生产成本,提高标定精度,进而获得准确的物体特征。
关键词:相机标定;多方法融合;标定效率中图分类号:TP391.41文献标识码:A0 引言在机器视觉和相机测量领域,完成测量任务的主要设备为相机,对其参数进行准确标定是完成测量任务的前提[1]。
在机械视觉应用的领域通常是对物体进行工程测量和检测,而完成机器视觉测量任务则需要通过相机内部参数的标定建立物与像的关联。
内部参数标定旨在保证世界坐标系下被测物体轮廓各个位置的特征点的空间位置与之在二维坐标系中同一特征点之间的对应关系,构建相机成像的几何模型是十分必要的,其几何模型参数即为相机内部参数[2]。
实现相机标定的关键是找到准确简洁的数学对应关系,解出该对应关系所建数学模型的参数,实现类似世界坐标系到图像坐标系的过程,实现三维坐标到二维坐标表达的过程,同时利用得到的数学模型引入其反函数还原相机成像时的表达过程,即为由平面图像表达其空间坐标系下的位置。
用较为简易的数学对应关系还原繁杂的相机成像过程并且求出该过程的反过程。
完成相机内部参数标定之后,此相机能够继续开展世界坐标系的重建还原。
高精准度的标定获得的数学模型使得机器视觉测量物体的特征点产生的误差明显减小。
相机标定得到相机模型是参数获取的过程,参数主要是指相机的内部参数,主要目的就是对相机内参数的标定装置进行设计与计算,确定相机在不同的机构作用下,所能完成的功能,同时提高相机内部参数的标定精度[3]。

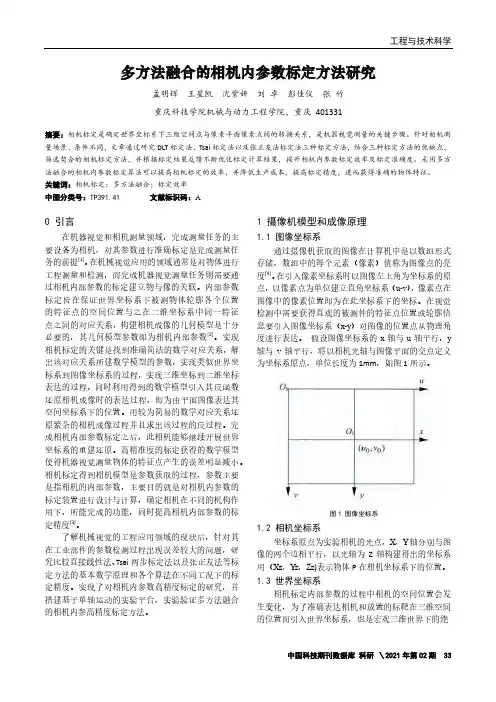
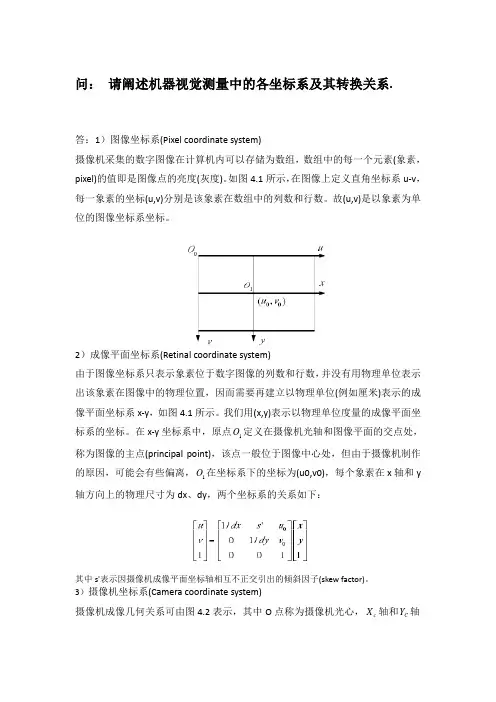
问: 请阐述机器视觉测量中的各坐标系及其转换关系.答:1)图像坐标系(Pixel coordinate system)摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(象素,pixel)的值即是图像点的亮度(灰度)。
如图4.1所示,在图像上定义直角坐标系u-v ,每一象素的坐标(u,v)分别是该象素在数组中的列数和行数。
故(u,v)是以象素为单位的图像坐标系坐标。
2)成像平面坐标系(Retinal coordinate system) 由于图像坐标系只表示象素位于数字图像的列数和行数,并没有用物理单位表示出该象素在图像中的物理位置,因而需要再建立以物理单位(例如厘米)表示的成像平面坐标系x-y ,如图4.1所示。
我们用(x,y)表示以物理单位度量的成像平面坐标系的坐标。
在x-y 坐标系中,原点1O 定义在摄像机光轴和图像平面的交点处,称为图像的主点(principal point),该点一般位于图像中心处,但由于摄像机制作的原因,可能会有些偏离,1O 在坐标系下的坐标为(u0,v0),每个象素在x 轴和y 轴方向上的物理尺寸为dx 、dy ,两个坐标系的关系如下:其中s'表示因摄像机成像平面坐标轴相互不正交引出的倾斜因子(skew factor)。
3)摄像机坐标系(Camera coordinate system)摄像机成像几何关系可由图4.2表示,其中O 点称为摄像机光心,c X 轴和C Y 轴与成像平面坐标系的x 轴和y 轴平行,C Z 轴为摄像机的光轴,和图像平面垂直。
光轴与图像平面的交点为图像主点O',由点O 与,,C C C X Y Z 轴组成的直角坐标系称为摄像机坐标系。
OO'为摄像机焦距。
4)世界坐标系(World coordinate system)在环境中还选择一个参考坐标系来描述摄像机和物体的位置,该坐标系称为世界坐标系。
摄像机坐标系和世界坐标系之间的关系可用旋转矩阵R 与平移向量t 来描述。
CCD摄像机的标定论文导读:摄像机标定在机器视觉中有着重要的意义。
确定这些参数的过程就是摄像机标定。
来计算摄像机的内外参数。
线性模型,CCD摄像机的标定。
关键词:机器视觉,摄像机标定,线性模型,内参数,外参数0. 引言摄像机标定在机器视觉中有着重要的意义,它是由二维图像提取三维空间信息必不可少的关键一步。
博士论文,线性模型。
空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的。
博士论文,线性模型。
构成这一几何模型的参数就是摄像机参数。
确定这些参数的过程就是摄像机标定。
摄像机标定要确定摄像机内部几何与光学特征参数即内部参数及摄像机在三维空间坐标系中位置和方向即外部参数。
目前摄像机的标定大致可归结为传统标定方法和摄像机自标定方法两类。
传统的摄像机标定技术需要一个标定参照物,即需要在摄像机前放置一个已知物体。
在标定过程中,利用物体上一些已知点的三维坐标和它们相应的图像坐标,来计算摄像机的内外参数;摄像机自标定技术不需要标定块,仅需多幅图像对应点之间的关系即可直接进行标定,客服了传统方法的一些缺点,灵活性强,潜在的应用范围也比较广,缺点是鲁棒性差,精度不高。
自标定方法主要用在精度要求不高的场合,如通讯、虚拟现实等。
传统摄像机标定方法是在一定的摄像机模型下,在一定的实验条件下,利用形状、尺寸已知的标定物,经过对其图形进行处理,并利用数学变换和计算方法来计算摄像机内外参数,算法复杂但精度高。
标定计算的复杂度与摄像机成像几何模型的复杂度有关。
1.摄像机标定模型摄摄像机标定一般采用针孔模型。
理想的针孔模型是线性模型,然而线性模型不能很精确的描述成像过程,通常还要对其进行补偿。
博士论文,线性模型。
1.1计算机图像与摄像机图像如图表示以像素为单位的计算机图像坐标系的坐标,表示以毫米为单位的摄像机图像坐标系的坐标。
在坐标系中,原点定义在摄像机光轴与图像平面的交点,该点一般位于图像中心,当由于摄像机制作的原因,也会有些偏离。
问: 请阐述机器视觉测量中的各坐标系及其转换关系.答:1)图像坐标系(Pixel coordinate system)摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(象素,pixel)的值即是图像点的亮度(灰度)。
如图4.1所示,在图像上定义直角坐标系u-v ,每一象素的坐标(u,v)分别是该象素在数组中的列数和行数。
故(u,v)是以象素为单位的图像坐标系坐标。
2)成像平面坐标系(Retinal coordinate system) 由于图像坐标系只表示象素位于数字图像的列数和行数,并没有用物理单位表示出该象素在图像中的物理位置,因而需要再建立以物理单位(例如厘米)表示的成像平面坐标系x-y ,如图4.1所示。
我们用(x,y)表示以物理单位度量的成像平面坐标系的坐标。
在x-y 坐标系中,原点1O 定义在摄像机光轴和图像平面的交点处,称为图像的主点(principal point),该点一般位于图像中心处,但由于摄像机制作的原因,可能会有些偏离,1O 在坐标系下的坐标为(u0,v0),每个象素在x 轴和y 轴方向上的物理尺寸为dx 、dy ,两个坐标系的关系如下:其中s'表示因摄像机成像平面坐标轴相互不正交引出的倾斜因子(skew factor)。
3)摄像机坐标系(Camera coordinate system)摄像机成像几何关系可由图4.2表示,其中O 点称为摄像机光心,c X 轴和C Y 轴与成像平面坐标系的x 轴和y 轴平行,C Z 轴为摄像机的光轴,和图像平面垂直。
光轴与图像平面的交点为图像主点O',由点O 与,,C C C X Y Z 轴组成的直角坐标系称为摄像机坐标系。
OO'为摄像机焦距。
4)世界坐标系(World coordinate system)在环境中还选择一个参考坐标系来描述摄像机和物体的位置,该坐标系称为世界坐标系。
摄像机坐标系和世界坐标系之间的关系可用旋转矩阵R 与平移向量t 来描述。
3d相机机器视觉检测原理
3D相机是一种可以获得物体三维空间信息的设备,可以通过对物体进行三维扫描和建模来实现机器视觉检测。
其原理基于三角测量法,即通过对物体的多个点进行测量,然后利用三角函数计算出物体的三
维空间位置。
具体流程如下:
1. 3D相机采用红外光或激光器发出光束,照射到物体表面,形
成一个由许多互相平行的光线组成的网格。
2. 当光线照射到物体表面时,会被散射或反射,这个过程中3D
相机会测量光线离开源头和到达远处之间的时间差。
由于光速是固定的,3D相机就可以计算出光线穿过的距离。
3. 通过对相机拍摄的图像进行处理,3D相机可以得到每个像素
点对应的三维坐标。
通过将不同视角下生成的三维坐标结合起来,可
以得到物体的完整三维模型。
4. 机器视觉检测工程师可以在三维模型上进行各种操作,比如
计算距离、角度、体积等物理特征,或者对物体的形状、颜色、材质
等进行分析和识别。
这些检测结果可以帮助工程师实现自动化控制、
质检、虚拟现实等多种应用。
相机标定的原理相机标定是指通过对相机内部参数和外部参数的测量和计算,确定相机成像的几何关系和畸变特性,从而提高相机成像的精度和稳定性。
相机标定是计算机视觉和机器视觉领域中的重要技术,广泛应用于三维重建、机器人视觉、自动驾驶等领域。
相机标定的原理基于相机成像的几何模型。
相机成像的几何模型可以用针孔相机模型来描述。
针孔相机模型假设相机成像的过程是通过一个小孔(针孔)将三维空间中的点投影到二维平面上。
这个过程可以用一个数学模型来描述,即针孔相机模型。
针孔相机模型包括内部参数和外部参数两个部分。
内部参数是指相机的内部特性,包括焦距、主点位置、像素大小等。
外部参数是指相机的外部特性,包括相机的位置和朝向。
相机标定的目的就是确定这些参数的值。
相机标定的过程需要使用标定板。
标定板是一种特殊的平面,上面有一些特定的标记,可以用来测量相机成像的几何关系和畸变特性。
标定板的选择和摆放对标定结果有很大的影响。
一般来说,标定板应该具有高对比度、高精度、高稳定性和高可重复性。
相机标定的过程可以分为内部参数标定和外部参数标定两个部分。
内部参数标定是通过拍摄标定板来确定相机的内部参数。
外部参数标定是通过拍摄不同位置和朝向的标定板来确定相机的外部参数。
相机标定的结果可以用来校正相机成像的畸变,提高相机成像的精度和稳定性。
相机标定是计算机视觉和机器视觉领域中的重要技术,可以提高相机成像的精度和稳定性。
相机标定的原理基于相机成像的几何模型,需要使用标定板来测量相机成像的几何关系和畸变特性。
相机标定的过程可以分为内部参数标定和外部参数标定两个部分,结果可以用来校正相机成像的畸变,提高相机成像的精度和稳定性。
机器视觉9点标定原理(一)机器视觉9点标定什么是机器视觉9点标定?机器视觉9点标定是一种常用的标定方法,用于校准相机镜头的畸变。
它通过在不同位置放置一个规则的校准板,并采集板上的点坐标来计算畸变参数,以实现图像的准确测量和分析。
标定原理机器视觉9点标定的原理基于相机模型和畸变模型。
在相机模型中,我们将相机抽象为一个透视投影系统,可以通过将三维世界坐标映射到二维图像坐标来描述相机成像过程。
而在畸变模型中,我们考虑相机镜头的畸变现象,主要包括径向畸变和切向畸变。
步骤1.准备校准板:在标定前,我们需要准备一个拥有明确区分特征的校准板。
一般采用黑白相间的棋盘格样式,并且每个格子内至少包含一个角点特征。
2.摄像头设置:将相机固定在一个位置,并确定相机参数(焦距、感光度等)。
3.获取标定板图像:在不同位置和角度下,通过相机获取校准板的图像。
4.检测角点:使用图像处理算法自动检测出每个格子的角点。
5.提取角点坐标:根据角点检测结果,将每个格子的角点坐标提取出来,得到一个相对于相机坐标系的二维点集合。
6.世界坐标生成:根据校准板的特征尺寸,可以将每个角点的世界坐标生成出来,得到一个相对于世界坐标系的三维点集合。
7.标定参数计算:根据二维点集合和三维点集合,采用最小二乘法等方法计算出相机的畸变参数、内参数和外参数。
8.检查标定结果:通过观察重投影误差等指标,判断标定结果的准确性。
9.应用标定参数:将获得的标定参数应用于机器视觉系统中,以校正图像中的畸变,提高测量和分析的准确性。
优势和应用机器视觉9点标定具有以下优势: - 简单易行:标定过程相对简单,只需要一块规则校准板和相机设备。
- 准确可靠:通过计算得到的畸变参数可以很好地校正图像中的畸变,提高测量和分析的准确性。
- 广泛应用:机器视觉9点标定可以应用于工业自动化、机器人导航、三维重建等领域。
总结机器视觉9点标定是一种常用的相机校准方法,通过对校准板上的角点进行图像处理和计算,得到相机的畸变参数。
计算机双目立体视觉双目立体视觉技术是仿照人类利用双目线索感知深度信息的方法,实现对三维信息的感知。
为解决智能机器人抓取物体、视觉导航、目标跟踪等奠定基础。
双目立体视觉(Binocular Stereo Vision )是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点之间的位置偏差,来获取物体三维几何信息的方法。
融合两只眼睛获取的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作为视差(Disparity )图像。
双目立体视觉系统立体视觉系统由左右两部摄像机组成,如图,世界空间中的一点A(X,Y ,Z)在左右摄像机的成像面1C 和r C 上的像点分别为)(111,v u a 和)(r r r v u a ,。
这两个像点是世界空间中同一个对象点A 的像,称为“共轭点”。
知道了这两个共轭像点,分别作它们与各自相机的光心1O 和r O 的连线,即投影线11O a 和r r O a ,它们的交点即为世界空间中的对象点A 。
这就是立体视觉的基本原理。
双目立体视觉智能视频分析技术恢复场景的3D 信息是立体视觉研究中最基本的目标,为实现这一目标,一个完整的立体视觉系统通常包含六个模块:图像获取、摄像机标定、特征提取、立体匹配、三维恢复和视频分析(运动检测、运动跟踪、规则判断、报警处理)。
图像获取(Image Acquisition )数字图像的获取是立体视觉的信息来源。
常用的立体视觉图像一般为双目图像,有的采用夺目图像。
图像的获取方式有很多种,主要有具体运用的场合和目的决定。
立体图像的获取不仅要满足应用要求,而且考虑视点差异、光照条件、摄像机的性能和场景特点等方面的影像。
摄像机标定(Camera Calibration )图像上每一点的亮度反映了空间物体表面某点反射光的强度,而该点在图像上的位置则与空 间物体表面相应点的几何位置有关。
基于改进的图像处理方法在桥梁表观病害识别中的应用摘要:为了提高桥梁表观病害识别的速度和准确度,通过改进图像处理方法,提高了图像拼接精度和速度,实现了在满足精度的条件下对桥梁表观病害的快速识别。
在改进的图像拼接方法中,对相机进行标定,计算拍摄物体的真实距离和拍摄间距及采样距离,确定图像重叠率、采用图像前处理方法校正像素尺寸,有效的解决了常用图像拼接方法的速度慢和精度低等问题。
改进后的图像拼接方法能够准确、快速的识别桥梁表观病害的位置、种类和破损情况。
结合某公路高架桥工程实例,利用改进后的图像拼接方法对高架桥梁底进行表观病害识别。
研究表明:经过实际桥梁工程验证,通过改进的图像拼接方法,利用图像前处理校正图像尺寸,能够准确的、快速的识别出桥梁表观病害,体现了改进的图像拼接方法在识别桥梁表观病害中的良好应用。
关键词:桥梁工程;桥梁表观病害识别;图像识别;图像前处理;重叠率1 项目概况1.1桥梁概况在本研究中,选择某高架桥右幅桥第77孔,2#、3#梁为测试梁体,该孔跨径20m,梁宽1.24m。
进行图像采集和病害识别。
标记现有梁体裂缝宽度,在测量裂缝宽度位置画圆圈标记;在2#梁底支点、1/4L、1/2L、3/4L位置粘贴裂缝宽度标准刻线卡片5张,用于对比分析。
1.2采集设备图像采集设备为尼康D810单反相机,有效像素为3635万,传感器为CMOS,传感器尺寸为35.9×24.0mm,最大分辨率为7360×4912,镜头为AF-S 尼克尔24-120mm f/4G ED VR。
手持云台为DJI RS 3 Pro,提供垂直向上拍摄、增稳、图传、无线控制功能。
2 相机标定2.1相机标定原理在图像识别和机器视觉应用中,为确定空间物体表面某点的位置与其在图像中对应点之间的关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。
在大多数条件下几何模型参数需通过试验与计算得到,求解参数的过程被称为相机标定(或摄像机标定)。