工业机器人技术(郭洪红)--第3章
- 格式:ppt
- 大小:2.48 MB
- 文档页数:60

《工业机器人技术》课程教学大纲课程名称:工业机器人技术英文名称:Industry Robot Technology课程编码:学时/学分:18/1课程性质:选修适用专业:机械设计制造及其自动化先修课程:理论力学,机械原理,机械设计,液压传动,自动控制理论一、课程的目的与任务《工业机器人技术》是一门培养学生具有机器人设计和使用方面基础知识的专业选修课,本课程主要研究机器人的结构设计与基本理论。
通过本课程的学习,可使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人机械系统设计、工业机器人控制等方面的知识。
其主要任务是培养学生:1、掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2、掌握工业机器人整体性能、主要部件性能的分析方法;3、掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4、了解工业机器人的新理论,新方法及发展趋向。
二、教学内容及基本要求第一章绪论教学目的和要求:了解工业机器人的发展及现状,结构原理及应用情况。
教学重点和难点:介绍工业机器人的产生和发展过程,掌握机器人的概念、特点、工业机器人的基本分类、工业机器人的应用、工业机器人的组成以及主要性能参数,工业机器人的手部、腕部、臂部、机座的结构原理和实例。
教学方法与手段:课堂教学第一节机器人的分类第二节工业机器人的应用和发展1.2.1 工业机器人的应用1.2.2 工业机器人的发展第三节工业机器人的基本组成及技术参数1.3.1 工业机器人的基本组成1.3.2 工业机器人的技术参数1.3.3 工业机器人的坐标1.3.4 工业机器人的参考坐标系习题第二章工业机器人机构教学目的和要求:本部分介绍常用机器人机构,要求学生掌握常用机器人机构设计形式。
教学重点和难点:主要介绍机器人末端操作器、手腕、手臂及机器人驱动与传动形式。
教学方法与手段:课堂教学第一节机器人末端操作器2.1.1 夹钳式取料手2.1.2 吸附式取料手2.1.3 专用操作器及转换器2.1.4 仿生多指灵巧手2.1.5 其它手第二节机器人手腕2.2.1 手腕的分类2.2.2 手腕的典型结构2.2.3 柔顺手腕结构第三节机器人手臂第四节机器人机座2.4.1 固定式机器人2.4.2 移动式机器人第五节工业机器人的驱动与传动2.5.1 直线驱动机构2.5.2 旋转驱动机构2.5.3 直线驱动和旋转驱动的选用和制动2.5.4 工业机器人的传动2.5.5 新型的驱动方式2.5.6 驱动传动方式的应用习题第三章机器人运动学教学目的和要求:机器人运动学主要研究两个问题:一个是运动学问题,即给定机器人手臂、腕部等各个构件的几何参数及各个关节变量求机器人手部对参考坐标系的位置和姿态;介绍机器人的微移动和微转动概念、两坐标系间的微分运动关系、变换式(方程)中的微分关系、机器人雅可比矩阵的概念、求法——微分变换法;了解逆雅可比矩阵的概念和求解。
工业机器人技术第一篇:工业机器人的概述工业机器人是指具有多自由度和可编程控制能力的自动化机械设备,可用于替代或辅助工人完成生产加工、物流搬运、装配和检测等工作。
其主要优点是高效、精确、稳定、可靠、安全和灵活,可适应不同场景和任务需求,提高生产力、质量和效益,降低成本和人力资源的消耗。
工业机器人具有以下主要特征:1. 多自由度:通常具有3至6个轴向自由度或更多,可进行复杂的运动和操作。
2. 可编程控制:采用数字化的控制系统,可根据用户需求和任务特点进行编程和调整,实现高精度和高灵活度的自动化控制。
3. 传动系统:一般采用电机或气动驱动,辅以减速机、齿轮、链条等传动装置,具有快速、精准、低噪声的特点。
4. 感知系统:可配备摄像头、激光雷达、红外线探测器等感知装置,实现环境感知、目标识别和路径规划等功能。
5. 执行器:通常采用机械臂、手爪、夹具等执行器,可适应不同的工件和材料,完成不同的加工和搬运任务。
6. 人机交互界面:可采用触摸屏、语音识别等方式与人类交互,提高操作灵活度和效率。
7. 安全保障:具有多种安全保障装置,如急停按钮、机器人边界、光栅、传感器等,可有效防止事故和伤害。
工业机器人的应用范围越来越广泛,主要包括:1. 制造业:可用于各种生产加工任务,如铸造、成型、切割、焊接、喷涂、组装等。
2. 物流业:可代替人工完成货物的搬运、包装、码垛等任务,提高效率和准确性。
3. 检测业:可用于各种质量检测和测试任务,如视觉检测、尺寸测量、力学测试等。
4. 农业:可用于农业生产、植物种植、果蔬采摘等任务,提高生产效率和质量。
5. 医疗保健:可用于医疗器械生产、病人护理和康复训练等任务,提高医疗保健质量和效率。
总之,工业机器人是目前工业自动化的重要组成部分,具有广阔的应用前景和市场潜力,是推动工业变革和提高生产效率的关键技术之一。
第二篇:工业机器人的发展历程工业机器人是二十世纪六十年代初期发展起来的新技术,经过几十年的发展,已经成为工业自动化中不可或缺的重要组成部分。
第一章课后习题1、工业机器人定义:是机器人的一种,由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间内完成各种作业的机电一体化的自动化生产设备。
2、工业机器人应用场合及其特点:①恶劣工作环境及危险工作(有害健康并可能危及生命,或不安全因素大不宜于人去从事的作业)②特殊作业场合和极限作业(对人类力所不及的作业)③自动化生产领域(早期工业机器人再生产主要用于上下料、点焊和喷漆,随柔性自动化出现扮演更重要角色)3、说明工业机器人的基本组成及各部分之间的关系。
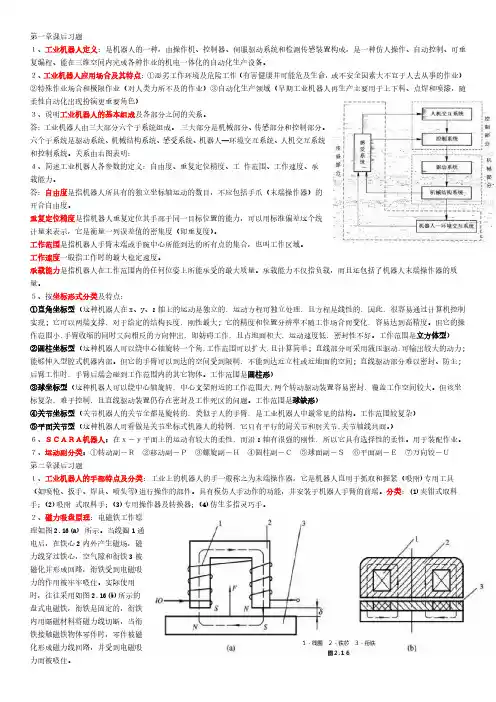
答:工业机器人由三大部分六个子系统组成。
三大部分是机械部分、传感部分和控制部分。
六个子系统是驱动系统、机械结构系统、感受系统、机器人—环境交互系统、人机交互系统和控制系统。
关系由右图表明:4、简述工业机器人各参数的定义:自由度、重复定位精度、工 作范围、工作速度、承载能力。
答:自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度。
重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示,它是衡量一列误差值的密集度(即重复度)。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指工作时的最大稳定速度。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
承载能力不仅指负载,而且还包括了机器人末端操作器的质量。
5、按坐标形式分类及特点:①直角坐标型(这种机器人在x、y、z轴上的运动是独立的, 运动方程可独立处理, 且方程是线性的, 因此, 很容易通过计算机控制实现; 它可以两端支撑, 对于给定的结构长度, 刚性最大; 它的精度和位置分辨率不随工作场合而变化, 容易达到高精度。
但它的操作范围小,手臂收缩的同时又向相反的方向伸出, 即妨碍工作, 且占地面积大, 运动速度低, 密封性不好。
工作范围是立方体型)②圆柱坐标型(这种机器人可以绕中心轴旋转一个角,工作范围可以扩大,且计算简单; 直线部分可采用液压驱动,可输出较大的动力; 能够伸入型腔式机器内部。
机械行业工业技术与应用方案第一章概述 (2)1.1 工业技术发展历程 (2)1.2 工业应用现状及趋势 (3)第二章工业技术原理 (3)2.1 运动学原理 (4)2.2 动力学原理 (4)2.3 传感器与控制系统 (4)第三章工业硬件系统 (5)3.1 本体结构 (5)3.1.1 基座 (5)3.1.2 铰链 (5)3.1.3 关节 (6)3.1.4 机身 (6)3.2 驱动系统 (6)3.2.1 电动机 (6)3.2.2 伺服系统 (6)3.2.3 传动系统 (6)3.3 末端执行器 (6)3.3.1 夹爪 (6)3.3.2 电磁铁 (7)3.3.3 针筒 (7)3.3.4 刀具 (7)第四章工业软件系统 (7)4.1 控制系统软件 (7)4.2 编程语言 (7)4.3 视觉系统 (8)第五章工业感知与导航技术 (8)5.1 传感器技术 (8)5.2 导航技术 (9)5.3 感知与导航集成 (9)第六章工业应用领域 (9)6.1 制造业应用 (9)6.1.1 汽车制造业 (9)6.1.2 电子制造业 (10)6.1.3 食品制造业 (10)6.2 物流与仓储应用 (10)6.2.1 仓库搬运 (10)6.2.2 分拣与拣选 (10)6.2.3 货物配送 (10)6.3 医疗与康复应用 (10)6.3.1 手术辅助 (10)6.3.2 康复治疗 (10)6.3.3 诊断与检测 (10)第七章工业系统集成 (11)7.1 系统集成原理 (11)7.2 系统集成设计 (11)7.3 系统集成调试与优化 (12)第八章工业安全与可靠性 (12)8.1 安全规范与标准 (12)8.2 安全设计 (13)8.3 故障诊断与维护 (13)第九章工业行业解决方案 (14)9.1 汽车行业解决方案 (14)9.1.1 概述 (14)9.1.2 焊接解决方案 (14)9.1.3 涂装解决方案 (14)9.1.4 装配解决方案 (14)9.1.5 检测解决方案 (14)9.2 电子行业解决方案 (15)9.2.1 概述 (15)9.2.2 SMT贴片解决方案 (15)9.2.3 组装解决方案 (15)9.2.4 测试解决方案 (15)9.3 食品与药品行业解决方案 (15)9.3.1 概述 (15)9.3.2 包装解决方案 (15)9.3.3 检测解决方案 (16)9.3.4 生产线优化解决方案 (16)第十章工业发展趋势与展望 (16)10.1 技术发展趋势 (16)10.2 行业应用拓展 (16)10.3 市场前景预测 (16)第一章概述1.1 工业技术发展历程工业技术作为机械行业的重要组成部分,其发展历程可追溯至上世纪中叶。
《工业机器人基础》课程简介第一篇:《工业机器人基础》课程简介《工业机器人基础》课程简介课程名称:工业机器人基础英文名称:INDUSTRYROBOTINTRODUCTION开课学期:第7学期学时/学分:32学时2学分课程类型:学科专业选修课开课专业:机械设计制造及其自动化选用教材:《工业机器人技术》郭洪红主编西安电子科技大学出版社,2006 主要参考书:1.《机器人技术基础》熊有伦主编华中理工大学出版社,19962.《机器人技术基础》孟庆鑫、王晓东主编哈尔滨工业大学出版社,20063.《机器人与控制技术》孙迪生,王炎主编机械工业出版社,19974.《工业机器人》吴振彪主编华中理工大学出版社,1997主讲教师:机电工程系王丽一、课程性质、目的与任务《工业机器人基础》是一门培养学生具有机器人设计和使用方面基础知识的专业选修课,本课程主要研究机器人的性能分析与控制方法。
通过本课程的学习,使学生初步掌握工业机器人的基本原理和应用技术,具备必要理论知识和一定的分析计算能力,为实际从事相关领域的工作奠定基础。
其主要任务是培养学生:1、掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2、掌握工业机器人整体性能、主要部件性能的分析方法;3、掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4、了解工业机器人的新理论,新方法及发展趋向。
二、课程的主要内容1.通过“绪论”使学生了解工业机器人的定义、应用与发展;了解工业机器人的组成、分类;了解工业机器人的主要技术参数;掌握工业机器人运动系统设计方法。
2.通过“工业机器人机构” 的学习使学生了解工业机器人末端操作器、手腕、臂部、机座、驱动与传动部件设计。
3.通过“工业机器人运动学和动力学”使学生掌握齐次坐标及齐次变换;掌握工业机器人连杆参数及其齐次变换矩阵;掌握工业机器人运动学方程;掌握工业机器人速度雅可比与速度分析;掌握工业机器人力雅可比与静力计算;掌握工业机器人动力学分析;掌握工业机器人轨迹规划的主要内容和方法。
工业机器人课后答案【篇一:工业机器人技术习题答案.pdf】>一、填空1、自由度2、操作机、控制器、示教器、末端执行器、操作机、控制器、示教器3、点位运动(ptp)、连续路径运动(cp)、cp4、正向二、选择1、d2、d 三、判断2、示教再现机器人、感知机器人、智能机器人3、日系、欧系二、选择1、d2、d3、c 三、判断第一章绪论第二章工业机器人的机械结构和运动控制第三章手动操纵工业机器人一、填空 1、机器人轴、基座轴、基座轴、外部轴 2、工具 3、点动二、选择1、d2、d 三、判断表手动移动机器3-6 人要领一、填空 1、示教、程序、再现 2、跟踪 3、离线编程二、选择1、b 2、d 3、d三、判断四、综合应用表4-6第四章初识工业机器人的作业编程直线轨迹作业示教第五章搬运机器人的作业编程一、填空 1、龙门式搬运机器人、悬臂式搬运机器人、侧壁式搬运机器人、摆臂式搬运机器人 2、吸附式、夹钳式、仿人式 3、机器人控制柜、示教器、气体发生装置、气吸附手爪二、选择1、d2、d三、判断1、√2、√3、√四、综合应用略取式、组合式 3、第六章码垛机器人的作业编程一、填空 1、龙门式码垛机器人、摆臂式码垛机器人 2、吸附式、夹板式、抓操作机、机器人控制柜、示教器、真空发生装置、气体发生装置4、一进一出、一进两出、两进两出二、选择1、a2、a三、判断一、填空 1、关节式 2、c型、伺服3、弧焊、示教器、焊枪、操作机、弧焊电源4、双、双、h 二、选择1、b2、d3、d 四、综合应用略第七章焊接机器人的作业编程三、判断(2)略2、1、√ √ 3、√ 四、综合应用(1)表 7-圆弧轨迹作业13 示教【篇二:工业机器人考点大全--习题答案】p class=txt>答:工业机器人是一种用于移动各种材料、零件、工具或专用装置,通过可编程动作来完成各种任务并具有编程能力的多功能机械手。
智能机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
《机器人技术》习题集答案第1章绪论一、选择题(4选1)1—2);2—1);3—3);4—3);5—2)二、判断题(Y/N)1—Y;2—Y;3—Y;4—N;5—N;6—Y;7—Y;8—Y;9—Y;10—Y三、简答题1.机器人学是关于研究、设计、制造和应用机器人的一门科学。
一般包括:机器人结构、机器人坐标系统、机器人运动学、机器人动力学、机器人控制、机器感知、机器视觉、机器人语言、决策与规划等。
相比机器人技术研究的更为概括、抽象和理论一些。
2.一般将机器人分为三代。
* 第一代为示教再现型机器人。
由操作人员预先给出(示教)机器人的运动轨迹,然后机器人准确地重复再现这种轨迹。
* 第二代为感觉判断型机器人,亦称为感知融合智能机器人。
机器人带有一些可感知环境的装置,通过反馈控制,使机器人能在一定程度上适应变化的环境。
* 第三代为自主感知型机器人,亦称为自主感知思维智能机器人。
机器人具有多种感知功能,可进行复杂的逻辑推理、判断及决策,可在作业环境中独立行动;具有发现问题且能自主地解决问题的能力。
3.直角坐标机器人圆柱坐标机器人极坐标机器人多关节型机器人串联关节机器人垂直关节机器人水平关节机器人并联关节机器人串并联关节机器人4.优点:结构最紧凑,灵活性大,占地面积最小,工作空间最大,能与其他机器人协调工作,避障性好缺点:位置精度较低,有平衡问题,控制存在耦合,设计与控制比较复杂5.优点:刚性好,结构稳定,承载能力高,运动精度高缺点:活动空间小。
6.气动机器人液压机器人电动机器人新型驱动方式机器人(如静电驱动器、压电驱动器、形状记忆合金驱动器、人工肌肉及光驱动器等)7.内部传感器是用来检测机器人自身状态(内部信息)的机器人传感器,如检测关节位置、速度的光轴编码器等。
是机器人自身运动与正常工作所必需的;外部传感器是用来感知外部世界、检测作业对象与作业环境状态(外部信息)的机器人传感器。
如视觉、听觉、触觉等。
是适应特定环境,完成特定任务所必需的。