理工电信电科0911自动控制原理教学进度表11-12上
- 格式:doc
- 大小:99.50 KB
- 文档页数:8
第1章自动控制理论的发展史及内容教学目的: 知识:掌握什么是自动控制,自动控制控制原理的发展史和主要内容技能:通过学习自动控制原理的发展进程了解本课程主要的任务教学重点: 自动控制原理的主要内容教学难点: 本课程的任务教学方法: 结合多媒体讲授法教学进度: 本内容为4学时,其中1.1、1.2、1.3节2学时,1.4、1.5、1.6节2学时。
参考资料:《现代控制工程》绪方胜彦著,科学出版社教学内容第一节自动控制理论的发展史及内容一提到自动化很多人就会问自动化是什么?所谓自动化就是指机器或装置在无人干预的情况下按规定的程序或指令自动地进行操作或运行。
广义的讲,自动化还包括模拟或再现人的自能活动。
自动化技术广泛用于工业、农业、国防、科学研究、交通运输、商业、医疗、服务以及家庭等各方面。
采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展、放大人的功能和创新的功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。
因此自动化是一个国家或社会现代化水平的重要标志。
在我国的古代,很多的能工巧匠就发明了许多原始的自动装置,以满足生产、生活和作战的需要。
其中比较著名的就有以下几种:(1)指南车指南车是中国古代用来指示方向的一种具有能自动离合齿轮系装置的车辆。
指南车是一种马拉的双轮独辕车,车箱上立一个伸臂的木人。
《宋史·舆服志》中对指南车的构造和各齿轮大小和齿轮数都有详细的记载。
(2)铜壶滴漏即漏壶,中国古代的自动计时装置,又称刻漏或漏刻。
漏壶的最早记载见于《周记》。
这种计时装置最初只有两个壶,由壶上滴水到下面的受水壶,液面使浮箭升起以示刻度(时间)。
(3)饮酒速度的自动调节宋朝仇士良著的《岭外代答》(公元1178)蹭记载中国南方和西南方部落村民的一种习俗,就是常用长0.6米以上的饮酒管饮酒。
在这种竹制饮酒管中有一条银制小鱼,作为可动的开关(即浮子式阀门)。
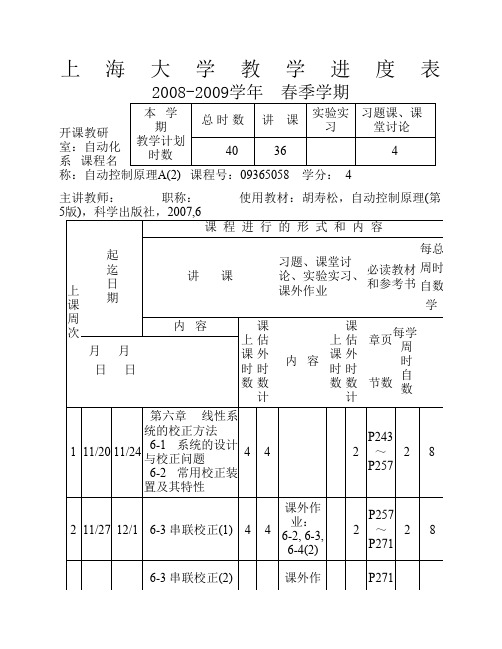
本 学 期教学计划时数总 时 数讲 课实验实习习题课、课堂讨论4036 4上课周次起迄日期课 程 进 行 的 形 式 和 内 容讲 课习题、课堂讨论、实验实习、课外作业必读教材和参考书每总周时自数学内 容上课时数课估外时数计内 容上课时数课估外时数计章页节数每学周时自数月日月日111/2011/24第六章 线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性44 2P243~P25728211/2712/16-3 串联校正(1)44课外作业:6-2, 6-3,6-4(2)2P257~P271286-3 串联校正(2)课外作P271上 海 大 学 教 学 进 度 表2008-2009学年 春季学期开课教研室:自动化系 课程名称:自动控制原理A(2) 课程号:09365058 学分: 4主讲教师: 职称: 使用教材:胡寿松,自动控制原理(第5版),科学出版社,2007,6312/412/86-4 反馈校正6-5 复合校正44业:6-5, 6-72~P28228412/1112/15第七章线性离散系统的分析与校正7-1 离散系统的基本概念7-2 信号的采样与保持(1)24习题讲解,课外作业:7-1(1),7-4(1),7-922P305~P31128512/1812/227-2 信号的采样与保持(2)7-3 z变换理论7-4 离散系统的数学模型(1)44课外作业:7-10, 7-11, 7-12(1)(2)2P311~P33128上课周次起迄日期课程进行的形式和内容讲课习题、课堂讨论、实验实习、课外作业必读教材和参考书每总周时自数学内容上课时数课估外时数计内容上课时数课估外时数计章页节数每学周时自数月日月日612/2512/297-4 离散系统的数学模型(2)7-5 离散系统的稳定性与稳态误差(1)24课外作业:7-15,22P331~P3582871/11/57-5(2),7-6 离散系统的动态性能第八章非线性控制系统分析8-1 非线性控制系统概述44课外作业:7-17,8-3(1)(4)2P358~P389288-2(1)81/81/128-2 常见非线性特性及其对系统运动的影响(2)8-3 相平面法(1)44课外作业:8-4(1)(3),8-5, 8-9,2P389~P4072891/151/198-3 相平面法(2)8-4 描述函数法(1)44课外作业:8-10(1)(2),8-15,8-162P408~P41628101/221/268-4 描述函数法(2)24习题讲解,课外作业:8-17,8-1922P416~P42328注:本表一式二份,由任课教师填写,一份自存,一份于开学第一周交各院系办公室,并经整理(按开课教研室)后于第二周交所在校区教学行政科归档。

xx科技大学《自动控制原理》(经典部分)课程教案授课时间:适用专业、班级:编写人:编写时间:)())()m n s z s p --221)(1)21)(1)i j s s T s T s ζττζ++++++ 极点形成系统的模态,授课学时:2学时章节名称第二章第三节控制系统的结构图与信号流图(1)备注教学目的和要求1、会绘制结构图。
2、会由结构图等效变换求传递函数。
重点难点重点:结构图的绘制;由结构图等效变换求传递函数。
难点:复杂结构图的等效变换。
教学方法教学手段1、教学方法:课堂讲授法为主;用精讲多练的方法突出重点,用分析举例的方法突破难点。
2、教学手段:以传统的口述、粉笔加黑板的手段为主。
教学进程设计(含教学内容、教学设计、时间分配等)一、引入(约3min)从“用数学图形描述系统的优点”引入新课。
二、教学进程设计(一)结构图的组成(约7min)1、信号线:表示信号的传递方向。
2、方框:表示输入和输出的运算关系,即C(S)=R(S)*G(S)。
3、比较点:表示两个以上信号进行代数运算。
4、引出点:一个信号引出两个或以上分支。
(二)结构图的绘制(约40min)绘制:列写微分方程组,并列写拉氏变换后的子方程;绘制各子方程的结构图,然后根据变量关系将各子结构图依次连接起来,得到系统的结构图。
例题讲解。
(二)结构图的简化(约46min)任何复杂的系统结构图,各方框之间的基本连接方式只有串联、并联和反馈连接三种。
方框结构图的简化是通过移动引出点、比较点、交换比较点,进行方框运算后,将串联、并联和反馈连接的方框合并,求出系统传递函数。
1、串联的简化:12()()()G s G s G s=2、并联的简化:12()()()G s G s G s=±3、反馈连接方框的简化:11()()1()()G ssG s H sΦ=4、比较点的移动:移动前后保持信号的等效性。
比较点前移比较点后移5、引出点的移动:移动前后保持信号的等效性。

第一章自动控制的一般概念第一节控制理论的发展自动控制的萌芽:自动化技术学科萌芽于18世纪,由于工业革命的发展,如何进一步降低人的劳动强度和提高设备的可靠性被提到了议程。
特点:简单的单一对象控制。
1. 经典控制理论分类线性控制理论,非线性控制理论,采样控制理论2.现代控制理论ﻫ3.大系统理论ﻫ4. 智能控制理论发展历程:1. 经典控制理论时期(1940-1960)研究单变量的系统,如:调节电压改变电机的速度;调整方向盘改变汽车的运动轨迹等。
⏹1945年美国人Bode出版了《网络分析与放大器的设计》,奠定了控制理论的基础;⏹1942年哈里斯引入传递函数;⏹1948年伊万恩提出了根轨迹法;⏹1949年维纳关于经典控制的专著。
特点:以传递函数为数学工具,采用频率域法,研究“单输入—单输出”线性定常控制系统的分析和设计,而对复杂多变量系统、时变和非线性系统无能为力。
2.现代控制理论时期(20世纪50年代末-60年代初)研究多变量的系统,如,汽车看成是一个具有两个输入(驾驶盘和加速踏板)和两个输出(方向和速度)的控制系统。
空间技术的发展提出了许多复杂的控制问题,用于导弹、人造卫星和宇宙飞船上,对自动控制的精密性和经济性指标提出了极严格的要求。
并推动了控制理论的发展。
⏹Kalman的能控性观测性和最优滤波理论;⏹庞特里亚金的极大值原理;⏹贝尔曼的动态规划。
特点:采用状态空间法(时域法),研究“对输入-多输出”、时变、非线性系统等高精度和高复杂度的控制问题。
3.大系统控制时期(1970s-)各学科相互渗透,要分析的系统越来越大,越来越复杂。
大系统控制理论是一种过程控制与信息处理相结合的动态系统工程理论,研究的对象具有规模庞大、结构复杂、功能综合、目标多样、因素众多等特点。
它是一个多输入、多输出、多干扰、多变量的系统。
如:人体,我们就可以看作为一个大系统,其中有体温的控制、情感的控制、人体血液中各种成分的控制等等。

电科-电信-西电版自动控制原理教案第一章:绪论1.1 自动控制的概念和发展1.2 自动控制系统的分类1.3 自动控制原理的应用领域1.4 本章小结第二章:自动控制系统的数学模型2.1 常用数学模型及其建立方法2.2 线性微分方程及其求解方法2.3 非线性系统的数学模型2.4 本章小结第三章:线性系统的时域分析法3.1 系统的稳定性分析3.2 系统的稳态性能分析3.3 系统的动态性能分析3.4 本章小结第四章:线性系统的频域分析法4.1 拉普拉斯变换及其性质4.2 线性系统的频域特性分析4.3 系统的频率响应分析4.4 本章小结第五章:线性系统的状态空间分析法5.1 状态空间的基本概念5.2 状态空间方程的求解5.3 系统的状态反馈控制5.4 本章小结第六章:非线性系统的分析6.1 非线性系统的数学模型6.2 非线性系统的稳定性分析6.3 非线性系统的控制策略6.4 本章小结第七章:模糊控制原理7.1 模糊控制的基本概念7.2 模糊控制器的设计方法7.3 模糊控制系统的仿真与实现7.4 本章小结第八章:自适应控制原理8.1 自适应控制的基本概念8.2 自适应控制器的设计方法8.3 自适应控制系统的应用实例8.4 本章小结第九章:自动控制系统的设计与实现9.1 系统设计的基本原则和方法9.2 控制器的设计与实现9.3 系统调试与优化9.4 本章小结第十章:自动控制技术的应用10.1 工业自动化控制系统10.2 控制系统10.3 生物医学控制系统10.4 本章小结重点和难点解析重点一:自动控制系统的概念和发展解析:本部分需要重点关注自动控制系统的定义、分类以及其发展历程。
学生需要理解自动控制系统的基本原理,掌握不同类型自动控制系统的特点和应用场景。
重点二:自动控制系统的数学模型解析:本部分重点关注数学模型的建立方法,包括线性微分方程和非线性系统的数学模型。
学生需要掌握数学模型的建立过程,了解不同模型的适用条件。
电科-电信-西电版自动控制原理教案一、课程简介1.1 课程背景自动控制原理是电子信息工程、通信工程等电类专业的核心课程,旨在培养学生掌握自动控制理论的基本概念、原理和方法,为后续从事电子信息技术领域的研究和工作打下基础。
1.2 课程目标通过本课程的学习,使学生了解自动控制系统的分类、性能指标及基本环节,掌握线性系统的时域分析、频域分析方法,熟悉现代控制理论的基本思想,具备分析和设计简单自动控制系统的能力。
1.3 教学内容本课程主要内容包括自动控制系统的基本概念、框图表示、性能指标,线性系统的时域分析、频域分析,以及现代控制理论的基本方法。
二、教学方法2.1 讲授与实践相结合通过课堂讲授,使学生掌握自动控制原理的基本概念和方法;结合实验教学,培养学生的动手能力和实际问题解决能力。
2.2 案例分析引入实际案例,使学生更好地理解自动控制系统的应用背景和实际效果。
2.3 互动式教学鼓励学生提问、发表见解,提高课堂互动性,激发学生的学习兴趣和主动性。
三、教学安排3.1 课时安排本课程共计48课时,其中包括理论讲授40课时,实验教学8课时。
3.2 授课计划按照教材章节顺序,合理安排每个章节的授课时间和内容。
四、考核方式4.1 平时成绩包括课堂表现、作业完成情况,占总成绩的30%。
4.2 期末考试包括选择题、填空题、计算题和论述题,占总成绩的70%。
五、教学资源5.1 教材《自动控制原理》(西电版),作者:X。
5.2 实验设备自动控制系统实验装置,包括控制器、传感器、执行器等。
5.3 辅助教材提供相关参考书籍、学术论文、网络资源等,以便学生课后自主学习和拓展。
六、教学内容与重点6.1 教学内容自动控制系统的基本概念与组成系统的数学模型及其建立方法线性系统的时域分析法线性系统的频域分析法系统的稳定性分析系统的设计与校正非线性控制系统分析现代控制理论基础自动控制系统的应用实例6.2 教学重点自动控制系统的基本概念与组成系统的数学模型及其建立方法线性系统的时域分析法与频域分析法系统的稳定性分析与判据系统的设计与校正方法非线性控制系统分析方法现代控制理论的基本概念与方法七、教学过程与教学策略7.1 教学过程理论教学:通过PPT演示、板书和互动讨论等方式进行理论知识的教学。
课程基本信息注:表中()选项请打“√”。
《自动控制原理》授课教案本章小结本章主要讨论了四个方面的内容:自动控制系统的有关基本概念,自动控制系统的不同分类方法,自动控制理论的发展历史和工程控制问题的基本要求。
对所涉及到的有关概念和思想没有进行深入的展开,我们将在后面的章节中具体阐述。
通过对本章内容的学习,能使大家对自动控制理论有一个初步的了解,便于后面章节的学习。
《自动控制原理》授课教案本章小结本章重点讨论了线性控制系统的四种数学模型,即运动方程(时域模型)、传递函数(复域模型)、结构图、信号流图。
主要研究内容包括:(1)动态系统微分方程的建立;(2)传递函数的定义和性质;(3)系统结构图的绘制方法和简化,以及如何从结构图求取系统的传递函数;(4)信号流图的概念和性质,以及如何运用梅逊公式获取系统的传递函数;(5)用MATLAB建立系统模型的方法,以及各模型之间的相互转化问题。
《自动控制原理》授课教案高等教育出版社2004年8月第1版4、《自动控制原理习题解析》胡寿松主编科学出版社2007年6月第一版本章小结本章根据系统的时间响应分析了系统的动态性能、稳态性能以及稳定性。
其主要的研究内容有以下几个方面:(1)通过讨论系统在典型信号下的时间响应,定义了描述系统动态和稳态性能的一系列指标。
动态性能指标通常用单位阶跃响应的上升时间、超调量和调节时间表示;稳态性能用稳态误差表示。
(2)分析了一阶、二阶和高阶系统在一些典型输入信号作用下的时间响应。
重点研究了二阶欠阻尼系统的单位阶跃响应,以及其动态性能指标的计算方法;还指出,对于高阶系统在一些条件下可以用低阶系统代替。
(3)系统的稳定性是系统正常工作的前提。
本章简要介绍了稳定性的概念,指出线性定常系统的稳定性由其闭环极点的位置决定,同时还介绍了线性定常系统稳定性的一种代数判别方法——劳斯判据。
(4)稳定的控制系统存在控制精度问题,这个控制精度通常用稳态误差来描述。
2011-2012 学年1 学期桂林电子科技大学实验教学进度计划(网络版)
系(部):教学实践部实验中心(室):金鸡路校区(2504)课程名称:电工与电子技术填表人:李晓冬填表日期:11 年9月15日
说明:1、为统一起见,填写本表时星期用一、二、三……;节次和周次用1,2,3……,批次用A,B,C……。
录入:李晓冬
2、若实验教学任务安排在晚上进行,可在本表“星期、节次”栏目中填写具体时间。
3、开课对象:一系,09 级,09专升本专业,班级,人数262人,课程性质必修。
复核:(16学时)
课程负责人:(签章)实验室主任:(签章)部主管领导(签章):审核:
2011-2012 学年1 学期桂林电子科技大学实验教学进度计划(网络版)
系(部):教学实践部实验中心(室):金鸡路校区(2504)课程名称:电工与电子技术填表人:李晓冬填表日期:11 年9月15日
说明:1、为统一起见,填写本表时星期用一、二、三……;节次和周次用1,2,3……,批次用A,B,C……。
录入:李晓冬
2、若实验教学任务安排在晚上进行,可在本表“星期、节次”栏目中填写具体时间。
3、开课对象:一系,09 级,09专升本专业,班级,人数262人,课程性质必修。
复核:(16学时)
课程负责人:(签章)实验室主任:(签章)部主管领导(签章):审核:。
周数单元学习内容课时掌握内容习题内容实验内容第一周了解课程的内容、大纲、考纲等信息,熟悉网上学习和互动平台1 无无无1第一章第1小节、第一章第2小节2开环、闭环控制系统的基本构成和名词术语;控制系统的分类;控制系统发展的三个理论阶段。
控制系统的三个基本性能要求。
习题1.1-1.6无第二周 2第二章第1小节、第二章第2小节、第二章第3小节3拉氏变换在工程中的意义,掌握图2-1的含义;掌握基本环节的拉氏变换。
拉氏变换的基本性质和定理:微分性质、终值定理拉氏反变换,掌握象函数不重根时的反变换。
习题2.1-2.3无第三周 3第二章第4小节1根据图2-1的含义,求解RLC电路的微分方程。
应用拉氏变换将微分方程转换为代数方程。
求解后再应用反拉氏变换,得到微分方程的解。
其中综合应用了2.2,2.3小节的知识点。
习题2.4无4第三章第1,2小节1了解系统微分方程,掌握传递函数的定义和特性,掌握传递函数与微分方程之间的转换。
了解RLC电路的复阻抗概念。
无无5第三章第3小节1了解系统结构图的要素;了解闭环系统的组成;掌握典型环节的传递函数。
无无第四周5第三章第3小节1掌握系统结构图的化简,包括基本和复杂两类化简。
无无6第三章第4小节1掌握信号流图的基本术语;掌握梅森公式的应用。
完成阶段练习一无7第四章第1小节1掌握线性系统稳定性的概念;了解S平面的基本知识;掌握判断稳定性的充要条件。
无无第五周8第四章第2小节、第四章第3小节2掌握劳斯判据的基本概念及其两种特例的处理。
应用劳斯判据确定系统中待定参数的取值范围;了解相对稳定性无无9第四章第4小节1掌握典型的测试输入信号及其传递函数;掌握一阶系统的典型结构;掌握一阶系统时间常数的定无无义。
第六周10第四章第5小节、第四章第6小节3掌握二阶系统典型的结构,及开环对象和闭环对象的传递函数;掌握主要参数;了解其单位阶跃响应曲线。
掌握二阶系统动态性能指标的计算;掌握主要参数与性能指标之间的相互关系。
襄樊学院
教学进度计划表2011 —2012 学年度上学期
院(系):物电系
教研室:电子
主讲教师:闵晶妍/陈红兵
填表日期:2011 年9 月 1 日
教务处制
襄樊学院教学进度计划表
2011 —2012 学年度上学期
主讲教师闵晶妍职称讲师学历研究生学位__硕士____ 任课专业电信电科
课程名称自动控制原理课程编号07ZX073102 年级电信电科0911学生人数32+36人
总学时54 学时,其中课堂讲授44 学时;实验教学0 学时;其它教学(讨论、见习等) 6 学时;机动 4 学时
教材(名称、主编、出版社、出版时间等)自动控制原理简明教程胡寿松科学出版社
主要参考书《现代控制系统》(第八版),[美] Richard C. Dorf Robert H.Bishop 谢红卫译, 高等教育出版社,2001.
在成绩考核方面的说明及要求:
1、考核依据:2007年《自动控制原理》教学大纲
2、考核方式、考试闭卷笔试,卷面100分,用时:120分钟
3、课程综合成绩的记分方法:平时成绩、期末考试成绩在课程总成绩中所占的比例分别为:30%、70%。
课程综合成绩一般按百分制记分,60 分及以上为合格。
4、考试要求:考核理论知识的要求分为了解,理解,掌握等;考核的能力层次分为:学会,掌握和熟练掌握或重点掌握,或记忆,理解,应用,分析,综合,评价等。
了解(知道):指学生能辨认科学事实、概念、原则、术语,包括必要的记忆;理解(熟悉):指学生能用自己的语言把学过的知识加以叙述、解释、归纳,并能把某一事实或概念分解为若干部分,指出它们之间的内在联系或与其他事物的相互联系;掌握(学会):指学生能根据不同情况对某些概念、定律、原理、方法等在正确理解的基础上结合实例加以运用,包括分析和综合。
5、组卷原则:本课程考试试题涵盖课程教学的章节。
试题难易程度分为,较易约占50%,中等难度约占40%,较难约占10%。
6、试题类型及试卷结构:试题类型包括:选择反应(客观性)试题(如多项选择题,填空题等);建构反应(主观性)试题(如简答题,
1
计算题,证明题等)。
试卷结构:选择反应(客观性)试题:约40%;建构反应(主观性)试题:约60%
2
3
4
5
教研室主任(签字):学院(系)教学负责人(签字):
200 年月日200 年月日
《课程教学进度计划表》填写说明
1.本表是教师授课的依据和学生课程学习的概要,也是学校和院(系)进行教学检查、评价课堂教学质量和考试命
题质量的重要依据。
有关非理论课教学的课程,可依此样式由院系自行设计。
2. 表中“教学形式及其手段”栏主要填写讲授、多媒体教学、课件演示、练习、实验、讨论等内容;“执行情况”栏,
主要填写计划落实或变更情况。
3. 本表经教研室主任、院(系)教学院长(主任)审签后,不得随意变动。
如须调整,应经教研室和院系教学院长(主
6
任)同意,并在执行栏内注明。
4.本表一式两份(可复印)。
经审签后,任课教师、院(系)各留一份。
7。