第二章4 8086指令系统(算数运算)
- 格式:ppt
- 大小:220.50 KB
- 文档页数:16
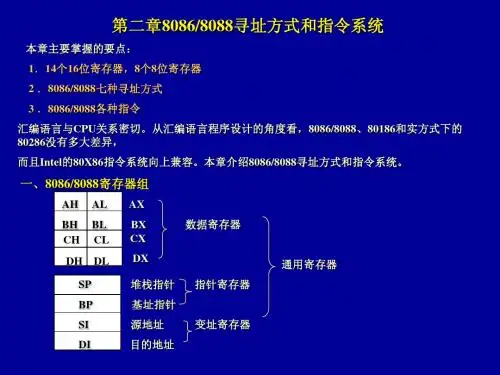
第二章 8086体系结构与80x86CPU1.8086CPU由哪两部分构成它们的主要功能是什么答:8086CPU由两部分组成:指令执行部件(EU,Execution Unit)和总线接口部件(BIU,Bus Interface Unit)。
指令执行部件(EU)主要由算术逻辑运算单元(ALU)、标志寄存器FR、通用寄存器组和EU控制器等4个部件组成,其主要功能是执行指令。
总线接口部件(BIU)主要由地址加法器、专用寄存器组、指令队列和总线控制电路等4个部件组成,其主要功能是形成访问存储器的物理地址、访问存储器并取指令暂存到指令队列中等待执行,访问存储器或I/O端口读取操作数参加EU运算或存放运算结果等。
2.8086CPU预取指令队列有什么好处8086CPU内部的并行操作体现在哪里答:8086CPU的预取指令队列由6个字节组成,按照8086CPU的设计要求,指令执行部件(EU)在执行指令时,不是直接通过访问存储器取指令,而是从指令队列中取得指令代码,并分析执行它。
从速度上看,该指令队列是在CPU内部,EU从指令队列中获得指令的速度会远远超过直接从内存中读取指令。
8086CPU内部的并行操作体现在指令执行的同时,待执行的指令也同时从内存中读取,并送到指令队列。
5.简述8086系统中物理地址的形成过程。
8086系统中的物理地址最多有多少个逻辑地址呢答:8086系统中的物理地址是由20根地址总线形成的。
8086系统采用分段并附以地址偏移量办法形成20位的物理地址。
采用分段结构的存储器中,任何一个逻辑地址都由段基址和偏移地址两部分构成,都是16位二进制数。
通过一个20位的地址加法器将这两个地址相加形成物理地址。
具体做法是16位的段基址左移4位(相当于在段基址最低位后添4个“0”),然后与偏移地址相加获得物理地址。
由于8086CPU的地址线是20根,所以可寻址的存储空间为1M字节,即8086系统的物理地址空间是1MB。
汇编语言程序设计第四版【课后习题答案】第1章汇编语言基础知识〔习题1.1〕简述计算机系统的硬件组成及各部分作用。
〔解答〕CPU:包括运算器、控制器和寄存器组。
运算器执行所有的算术和逻辑运算;控制器负责把指指令逐条从存储器中取出,经译码分析后向机器发出各种控制命令,并正确完成程序所要求的功能;寄存器组为处理单元提供所需要的数据。
存储器:是计算机的记忆部件,它用来存放程序以及程序中所涉及的数据。
外部设备:实现人机交换和机间的通信。
〔习题1.2〕明确下列概念或符号:主存和辅存,RAM和ROM,存储器地址和I/O端口,KB、MB、GB和TB。
〔解答〕主存又称内存是主存储器的简称,主存储器存放当前正在执行的程序和使用的数据,CPU可以直接存取,它由半导体存储器芯片构成其成本高、容量小、但速度快。
辅存是辅助存储器的简称,辅存可用来长期保存大量程序和数据,CPU需要通过I/O接口访问,它由磁盘或光盘构成,其成本低、容量大,但速度慢。
RAM是随机存取存储器的英语简写,由于CPU可以从RAM读信息,也可以向RAM写入信息,所以RAM也被称为读写存储器,RAM型半导体存储器可以按地址随机读写,但这类存储器在断电后不能保存信息;而ROM中的信息只能被读出,不能被修改,ROM型半导体通常只能被读出,但这类存储器断电后能保存信息。
存储器由大量存储单元组成。
为了区别每个单元,我们将它们编号,于是,每个存储单元就有了一个存储地址,I/O接口是由一组寄存器组成,为了区别它们,各个寄存器进行了编号,形成I/O地址,通常称做I/O端口。
KB是千字节、MB是兆字节、GB是吉字节和TB是太字节,它们都是表示存储器存储单元的单位。
〔习题1.3〕什么是汇编语言源程序、汇编程序、目标程序?〔解答〕用汇编语言书写的程序就称为汇编语言源程序;完成汇编工作的程序就是汇编程序;由汇编程序编译通过的程序就是目标程序。
〔习题1.4〕汇编语言与高级语言相比有什么优缺点?〔解答〕汇编语言与高级语言相比的优点:由于汇编语言本质就是机器语言,它可以直接地、有效地控制计算机硬件,因而容易产生运行速度快,指令序列短小的高效目标程序,可以直接控制计算机硬件部件,可以编写在“时间”和“空间”两方面最有效的程序。
3-2 8086 指令系统包括:数据传送类指令、算术运算类指令、逻辑运算与移位指令、串操作指令、转移和调用指令与微处理器控制指令一、数据传送类指令包括:通用传送指令、地址传送指令、标志寄存器传送指令、输入/输出指令传送类指令的最大特点是:指令执行后,不影响标志寄存器(标志寄存器传送指令除外)。
(一)、通用传送指令类型:基本传送指令、堆栈传送指令、数据交换指令、换码指令功能:把源操作数传送到目的寄存器或目的地址单元。
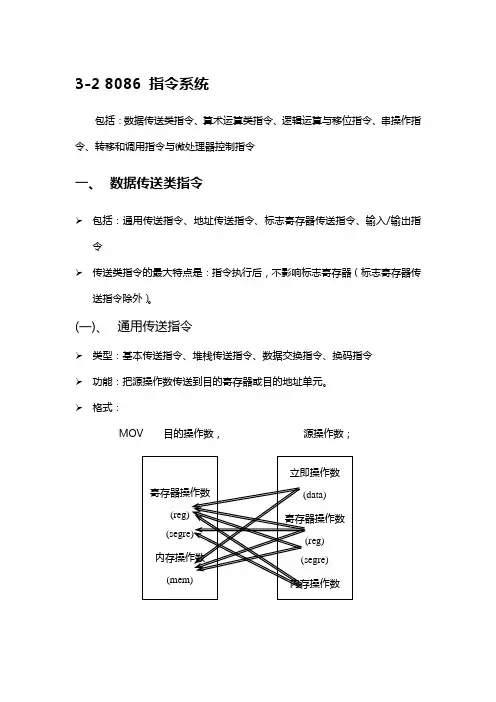
格式:MOV 目的操作数,源操作数;1.传送指令格式: MOV 目的操作数,源操作数;功能:把源操作数传送到目标寄存器或目标地址单元。
源操作数可以是:立即数、寄存器操作数和内存操作数。
目标操作数可以是:寄存器操作数和内存操作数。
MOV 指令可以实现:立即数→通用寄存器、内存单元。
段寄存器、寄存器操作数→寄存器、内存单元。
内存操作数→通用寄存器、段寄存器。
1)立即数→通用寄存器、内存单元。
立即数→通用寄存器MOV AX,2356H;MOV BH,33H;立即数→内存单元MOV [BX+SI],0F080H;MOV BYTE PTR [BX],12H;源操作数、目的操作数的类型要匹配。
源操作数是单字节,目的操作数是间址、变址、基址+变址的内存操作数,后者必须用PTR说明是字节型。
2)段寄存器、寄存器操作数→寄存器、内存单元。
寄存器操作数→寄存器MOV DL,CLMOV BP,SP寄存器操作数→内存单元MOV BUF, AL;BUF 为字节型变量MOV WBUF,AX;WBUF为字型变量段寄存器→寄存器、内存单元。
MOV BX,SS ;MOV OLD1C,ES;OLD1C为字型变量3)寄存器、内存单元操作数→段寄存器。
MOV DS,AX;MOV ES,[BX];错误指令举例:MOV 52,AH;MOV CS,AX;MOV IP,BX;CS、IP和立即数不能做目的操作数。
MOV [DI],[SI];MOV [1000H],[SI];禁止内存单元之间直接传送。


8086微处理器指令系统数据传送数据传送指令可完成寄存器与寄存器之间、寄存器与存储器之间以及寄存器与I/O 端口之间的字节或字传送,它们共同的特点是不影响标志寄存器的内容通用数据传送指令MOV 传送指令格式: MOV 目标,源指令功能:将源操作数(一个字节或一个字)传送到目标操作数。
源操作数可以是8/16位通用寄存器、段寄存器、存储器中的某个字节/字或者是8/16 位的立即数。
堆栈操作指令后进先出的规则存取信息堆栈指针信息存入堆栈时,堆栈指针将自动减量,并将信息存入堆栈指针所指出的存储单元当需要从堆栈中取出信息时,也将从堆栈指针所指出的存储单元读出信息,并自动将堆栈指针增量堆栈指针始终指向堆栈中最后存入信息的那个单元栈顶不断移动、动端堆栈区的另一端则是固定不变的栈底PUSH 入栈指令格式: PUSH 源指令功能:将源操作数压入堆栈。
源操作数可以是16 位通用寄存器、段寄存器或者是存储器中的数据字。
P38 例 2.12POP 出栈指令格式: POP 目标指令功能:将堆栈中当前栈顶和次栈顶中的数据字弹出送到目标操作数。
目标操作数可以是16 位通用寄存器、段寄存器或者是存储单元。
P39 例 2.13XCHG 交换指令1格式: XCHG 目标,源指令功能:将源操作数与目标操作数(一个字节或一个字)相互交换位置。
源操作数可以是通用寄存器或存储单元。
目标操作数只允许是通用寄存器。
P39 例 2. 14XLAT 换码指令2目标地址传送指令这是一类专用于传送地址码的指令,可用来传送操作数的段地址或偏移地址LEA 有效地址送寄存器指令格式: LEA 目标,源指令功能:将源操作数的有效地址EA 传送到目标操作数。
源操作数必须是存储器操作数。
目标操作数必须是16位通用寄存器。
LDS 指针送寄存器和DS指令格式: LDS 目标,源指令功能:从源操作数所指定的存储单元中取出某变扯的地址指针(共4 个字节),将其前两个字节(即变量的偏移地址)传送到目标操作数,后两个字节(即变量的段地址)传送到DS 段寄存器中。
第二章8086习题答案编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(第二章8086习题答案)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为第二章8086习题答案的全部内容。
微机原理第二章习题与分析解答1.单项选择题(1)8086工作最大方式时应将引脚MN/MX接()A.负电源 B。
正电源 C。
地D。
浮空分析:8086规定工作在最小方式下MN/MX接+5V,工作在最大方式下MN/MX接地。
答案:C(2)8086能寻址内存储器的最大地址范围为()A.64KB B.1MB C.16MB D。
16KB分析:8086有A0~A1920条地址总线,220=1MB。
答案:B(3)在总线周期,8086CPU与外设需交换()A.地址信息B。
数据信息 C。
控制信息D。
A、B、C分析在总线周期,CPU必须发出地址信息的控制信息以后,才能实现与外设进行交换数据。
答案:D(4)8086用哪种引脚信号来确定是访问内存还是访问外设()A.RD B。
WR C。
M/IO D。
INTA分析:引脚信号M/IO是Memory or Input Output的缩写,当M/IO=0时,用以访问外设;当M/IO=1,用以访问外设。
答案:C(5)在8086指令系统中,下列哪种寻址方式不能表示存储器操作数()A.基址变址寻址B。
寄存器寻址C。
直接寻址 D。
寄存器间接寻址分析:8086指令系统共有七种寻址方式,只有立即寻址方式和寄存器寻址方式不是表示存储器操作数的。
答案:B(6)当CPU时钟频率为5MHz,则其总线周期()A.0.8 s B.500ns C.200ns D。
200μs分析:时钟周期T=1/ƒ=200ns,而一个总路线周期通常由4个T状态组成,有4╳T=4╳200ns=0.8μs。
8086CPU指令和寄存器英文全称。
一、数据传送指令比如,mov(move)、push、pop、pushf(push flags)、popf(pop flags)、xchg(exchange)等都是数据传送指令,这些指令实现寄存器和内存、寄存器和寄存器之间的单个数据传送。
二、算术运算指令比如,add、sub(substract)、adc(add with carry)、sbb(substract with borrow)、inc (increase)、dec(decrease)、cmp(compare)、imul(integer multiplication)、idiv (integer divide)、aaa(ASCII add with adjust)等都是算术运算指令,这些指令实现寄存器和内存中的数据运算。
它们的执行结果影响标志寄存器的sf、zf、of、cf、pf、af位。
三、逻辑指令比如,and、or、not、xor(exclusive or)、test、shl(shift logic left)、shr(shift logic right)、sal(shift arithmetic left)、sar(shift arithmetic right)、rol(rotate left)、ror(rotate right)、rcl(rotate left through carry)、rcr(rotate right through carry)等都是逻辑指令。
除了not 指令外,它们的执行结果都影响标志寄存器的相关标志位。
四、转移指令可以修改IP,或同时修改CS和IP的指令统称为转移指令。
转移指令分为一下几类。
(1)无条件转移指令,比如,jmp(jump);(2)条件转移指令,比如,jcxz(jump if CX is zero)、je(jump if equal)、jb(jump if below)、ja(jump if above)、jnb(jump if not below)、jna(jump if not above)等;(3)循环指令,比如,loop;(4)过程,比如,call、ret(return)、retf(return far);(5)中断,比如,int(interrupt)、iret(interrupt return)。
8086指令系统总结学习微处理器及其程序设计,必须掌握微处理器的指令系统。
本章以 8086 微处理器为例介绍微型计算机的指令系统,包括指令格式、寻址方式和各类指令功能。
要明确各种寻址方式的区别和特点,掌握有效地址和物理地址的计算方法,要正确使用指令,掌握各类指令的功能、对标志位的影响和使用上的一些特殊限制。
能够编写小汇编程序,初步掌握汇编程序的编写和调试方法。
本章的重点难点内容是: 8086 的指令格式及寻址方式, 8086 的常用指令和8086 指令前缀的使用。
下面我们分别进行总结:一.8086寻址方式(1)操作数是数字,指令中立即写出数字------------立即数寻址MOV AX,1234H 解释此句意义(2)操作数是寄存器内容,指令中写出寄存器的符号---------寄存器寻址MOV AX,BX(3)操作数是存储单元内容,用括号括出存储单元有效地址-----直接寻址MOV AX,[1234H]MOV AX,ES:[1234H](4)操作数是存储单元内容,用括号括出寄存器或其表达式,寄存器或其表达式的值为存储单元有效地址-------------间接寻址MOV AH,[BX]MOV AX,ES:[SI]MOV AL,[BX+SI+5]===5[BX+SI]===5[BX][SI]二.8086指令系统1.数据传送指令(一)通用传送指令(1)MOV指令指令格式:MOV 目,源功能:将源操作数传送给目标操作数。
(2)堆栈操作指令进栈指令:PUSH格式:PUSH 源功能:将源操作数压入堆栈。
例:用堆栈指令完成上例的功能。
MOV AX,3000HMOV DS,AX ;段寄存器填充MOV SI,0100H ;基本指令执MOV DI,2000H ;行前的初值MOV CX,50NT:PUSH [SI] ;程序从这POP [DI] ;开始设计INC SIINC SIINC DIINC DILOOP NTMOV AH,4CHINT 21H(3)交换指令 XCHG格式:XCHG 目,源功能:源和目标中的内容交换。