两相混合式步进电机及其驱动技术
- 格式:ppt
- 大小:4.32 MB
- 文档页数:55
Q2HB44MC二相混合式步进电机驱动器使用说明1.硬件连接:-将驱动器的V+和GND引脚分别连接到电源的正负极上。
-将电机的两组相线分别连接到驱动器的A+、A-和B+、B-引脚上。
-根据实际情况,选择并连接好步进电机的继电器控制引脚。
2.驱动器参数设置:-驱动器上有一个参数选择开关,用于设置驱动器的工作模式和细分数。
通过设置不同的参数,可以调整电机的转速和精度。
-请参考电机和驱动器的技术手册,了解具体参数设置的含义和影响。
-注意,参数设置需要在电机和驱动器均断电的情况下进行,避免人身伤害和设备损坏。
3.输入信号控制:-本驱动器支持两种输入信号控制方式:脉冲/方向控制和CW/CCW控制。
-脉冲/方向控制方式:通过脉冲信号控制电机的转动步数,在每个脉冲输入时电机转动一个步进角。
方向信号用于控制电机的转动方向。
-CW/CCW控制方式:通过CW、CCW信号控制电机的正转和反转。
-根据实际应用需求选择合适的控制方式,并通过设置驱动器的参数进行配置。
4.报警和保护功能:-本驱动器具备多种报警和保护功能,如过流保护、过热保护等。
-当驱动器工作时发生异常情况,比如过载或温度过高,驱动器会自动停止工作并触发保护功能。
-在使用过程中,要留意驱动器的报警灯和状态指示灯,以便及时发现和解决问题。
5.电机转动方向控制:-本驱动器可通过反转相线的连接方式来控制电机的正转和反转。
-如果电机正反转方向与期望不符合,只需要将A相或B相的两根线交换位置即可实现方向的改变。
6.搭配控制器使用:-本驱动器可以与各种控制器配合使用,如PLC、单片机等。
-控制器需要提供相应的控制信号给驱动器,通过控制信号实现电机的控制和运动。
7.其他注意事项:-在电源和驱动器连接时,确保电源稳定,避免电压波动和供电问题对驱动器正常工作造成影响。
-避免驱动器的过度负载运行,以免损坏电机和驱动器。
-定期检查和清洁驱动器,确保散热良好,以防止过热损坏。
-遵循驱动器和电机的使用和维护手册,避免误操作。
Q2HB44MC二相混合式步进电机驱动器使用说明1.引言:2.驱动器连接:将电机的四个电源线(两个相位)连接到驱动器的输出端子上。
请注意线缆的正确极性连接,以免损坏驱动器或电机。
另外,在连接线缆之前,请确保驱动器和电机的电源已关闭。
3.电源设置:驱动器需要一个外部电源供电。
请根据电机的额定电压选择合适的电源,并将其连接到驱动器的电源输入端子上。
在接通电源之前,先检查一下电源的稳定性和电压是否匹配。
4.步进模式设置:Q2HB44MC(D)驱动器支持全步进和微步进模式。
通过设置驱动器的配置开关,可以选择不同的步进模式。
全步进模式适合一些不需要太高精度控制的应用,而微步进模式则可以提供更高的分辨率和平滑度。
请根据具体需求选择合适的步进模式。
5.步进角度和细分设置:步进电机的角度取决于其旋转电磁铁极对数和步进模式。
通过设置驱动器的细分开关,可以将一次步进划分为更小的步进角度,从而提供更高的精度。
请根据实际需求选择合适的细分设置。
6.保护和故障检测:Q2HB44MC(D)驱动器具有过流和过热保护功能。
当电机过流或过热时,驱动器会自动关闭输出信号,以保护驱动器和电机。
此外,驱动器还支持故障检测功能,可以检测到电机的缺相、断线等故障情况。
如果发生故障,请及时处理并排除故障。
7.反向运动控制:8.外部信号输入和输出:驱动器具有多个外部信号输入和输出端口,可以与控制器或其他外部设备进行通信。
通过这些外部信号,可以实现各种控制功能,如启动/停止信号、速度控制信号等。
请参考驱动器的技术手册,了解每个信号端口的具体功能和使用方法。
总结:Q2HB44MC(D)二相混合式步进电机驱动器是一款功能强大的驱动器,适用于各种步进电机控制应用。
通过合理设置驱动器的参数和模式,可以实现高精度的步进电机运动控制。
请仔细阅读驱动器的技术手册,并根据具体需求进行相应的设置和调整,以获得最佳的控制效果。

两相混合式步进电机H桥驱动电路设计原理H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动。
永磁步进电机或混合式步进电机的励磁绕组都必须用双极性电源供电,也就是说绕组有时需正向电流,有时需反向电流,这样绕组电源需用H桥驱动。
本文以两相混合式步进电机驱动器为例来设计H桥驱动电路。
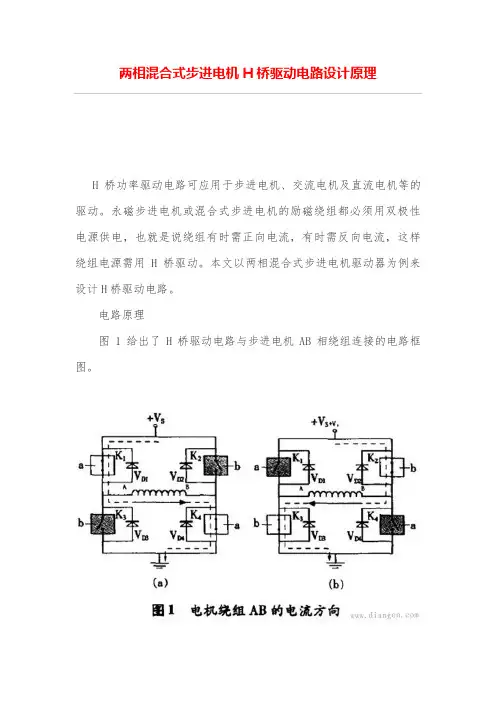
电路原理图1给出了H桥驱动电路与步进电机AB相绕组连接的电路框图。
4个开关K1和K4,K2和K3分别受控制信号a,b的控制,当控制信号使开关K1,K4合上,K2,K3断开时,电流在线圈中的流向如图1(a),当控制信号使开关K2,K3合上,K1,K4断开时,电流在线圈中的流向如图1(b)所示。
4个二极管VD1,VD2,VD3,VD4为续流二极管,它们所起的作用是:以图1(a)为例,当K1,K4开关受控制由闭合转向断开时,由于此时线圈绕组AB上的电流不能突变,仍需按原电流方向流动(即A→B),此时由VD3,VD2来提供回路。
因此,电流在K1,K4关断的瞬间由地→VD3→线圈绕组AB→VD2→电源+Vs形成续流回路。
同理,在图1(b)中,当开关K2,K3关断的瞬间,由二极管VD4,VD1提供线圈绕组的续流,电流回路为地→VD4→线圈绕组BA→VD1→电源+Vs。
步进电机驱动器中,实现上述开关功能的元件在实际电路中常采用功率MOSFET管。
由步进电机H桥驱动电路原理可知,电流在绕组中流动是两个完全相反的方向。
推动级的信号逻辑应使对角线晶体管不能同时导通,以免造成高低压管的直通。
另外,步进电机的绕组是感性负载,在通电时,随着电机运行频率的升高,而过渡的时间常不变,使得绕组电流还没来得及达到稳态值又被切断,平均电流变小,输出力矩下降,当驱动频率高到一定的时候将产生堵转或失步现象。
因此,步进电机的驱动除了电机的设计尽量地减少绕组电感量外,还要对驱动电源采取措施,也就是提高导通相电流的前后沿陡度以提高电机运行的性能。
步进电机的缺陷是高频出力不足,低频振荡,步进电机的性能除电机自身固有的性能外,驱动器的驱动电源也直接影响电机的特性。
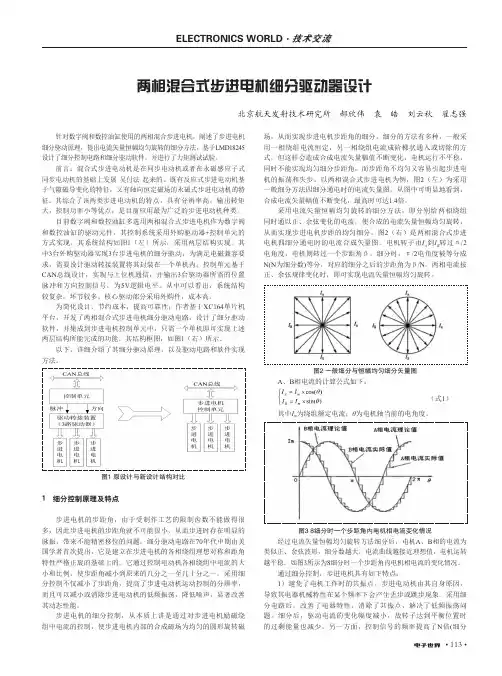
• 113•两相混合式步进电机细分驱动器设计北京航天发射技术研究所 郝欣伟 袁 皓 刘云秋 翟志强针对数字阀和数控油缸使用的两相混合步进电机,阐述了步进电机细分驱动原理,提出电流矢量恒幅均匀旋转的细分方法,基于LMD18245设计了细分控制电路和细分驱动软件,并进行了力矩测试试验。
前言:混合式步进电动机是在同步电动机或者在永磁感应子式同步电动机的基础上发展 吴付法 起来的。
既有反应式步进电动机基于气隙磁导变化的特征,又有轴向恒定磁场的永磁式步进电动机的特征。
其综合了该两类步进电动机的特点,具有分辨率高,输出转矩大,控制功率小等优点,是目前应用最为广泛的步进电动机种类。
目前数字阀和数控油缸多选用两相混合式步进电机作为数字阀和数控油缸的驱动元件,其控制系统采用外购驱动器+控制单元的方式实现。
其系统结构如图1(左)所示,采用两层结构实现。
其中3台外购驱动器实现3台步进电机的细分驱动,为满足电磁兼容要求,需要设计驱动转接装置将其封装在一个单机内;控制单元基于CAN 总线设计,实现与上位机通信,并输出3台驱动器所需的位置脉冲和方向控制信号,为5V 逻辑电平。
从中可以看出,系统结构较复杂,环节较多,核心驱动部分采用外购件,成本高。
为简化设计,节约成本,提高可靠性,作者基于XC164单片机平台,开发了两相混合式步进电机细分驱动电路,设计了细分驱动软件,并集成到步进电机控制单元中,只需一个单机即可实现上述两层结构所能完成的功能。
其结构框图,如图1(右)所示。
以下,详细介绍了其细分驱动原理,以及驱动电路和软件实现方法。
图1 原设计与新设计结构对比1 细分控制原理及特点步进电机的步距角,由于受制作工艺的限制齿数不能做得很多,因此步进电机的步距角就不可能很小,从而步进时存在明显的脉振,带来不能精密移位的问题。
细分驱动电路在70年代中期由美国学者首次提出,它是建立在步进电机的各相绕组理想对称和距角特性严格正旋的基础上的。
两相混合步进电机步进电机是一种电动机,它的特点是能够按照电脉冲信号进行定量控制旋转角度或者转速。
步进电机具有运动平稳、精度高、噪音低等优点,在电子设备领域被广泛应用。
在步进电机中,两相混合步进电机是一种常见的类型。
两相混合步进电机由于其结构简单、制造成本低等特点被广泛使用,尤其在微型化电子设备中得到了广泛应用。
它由步进电机驱动器、步进电机控制器和两相混合步进电机本体等组成。
本文将详细介绍两相混合步进电机的结构、原理、控制方法和应用等。
一、结构两相混合步进电机主要由定子、转子和绕组三个部分组成。
1. 定子两相混合步进电机的定子是由两个磁极和两个齿构成,其中每个齿上都有一个线圈。
定子上线圈的两端经过连接电源后会形成一个有规律的磁场。
当极对应的两个线圈分别接通时,就会形成两个北极和两个南极的交替磁场,从而形成有规律的磁场变化。
2. 转子两相混合步进电机的转子是由两个部分组成:一个是磁极,另一个是齿。
磁极分为南、北两极,随着定子上线圈发生变化而转动。
而齿则是由数个齿齿缝组成。
3. 绕组两相混合步进电机的绕组是由两个线圈组成,每个线圈绕制在定子两个相邻齿上,线圈之间隔一个齿缝。
两个线圈相位差90度左右,当电源连接时,两个线圈将会产生90度的相位差异,从而驱动转子转动。
二、工作原理两相混合步进电机的工作原理是将电信号转换成机械运动。
当控制器向步进电机驱动器发送电脉冲信号后,驱动器的电路就会根据电脉冲信号控制电源的开关,使得电机绕组产生磁场的变化。
这时磁场将会影响到转子的位置,使得转子的角度发生改变。
如此重复,电机就会按照电脉冲信号控制的角度或转速旋转。
三、控制方法1. 开环控制开环控制是指不考虑电机实际位置的控制方法,仅通过发送电脉冲信号的方式控制电机的角度或转速,缺点是容易因为负载或摩擦力而出现角度偏差。
闭环控制是指通过检测电机实际位置来进行控制。
通常采用编码器等设备来检测电机的转动位置及速度信息,将检测结果反馈给控制器进行调整控制。

M422型两相混合式步进电机驱动器使用说明书一、概述M422型细分型两相混合式步进电机驱动器,采用直流10~40V供电,适合驱动电压24V~36V,电流小于2.2A外径42~57毫米的两相混合式步进电机。
此驱动器采用全数字电流环进行细分控制,电机的转矩波动小,低速运行平稳,振动和噪音低。
高速时可输出相对较高的力矩,定位精度高。
广泛适用于雕刻机、数控机床、包装机械、传动设备等分辩率要求较高的设备上。
主要特点●平均电流控制,两相正弦电流驱动输出●直流10~40V供电●光电隔离信号输入/输出● 8档细分和自动半流功能● 8档输出相电流设置●具备脱机功能●启动转速高●高速力矩大二、控制信号接口图1是驱动器的接线原理图1、控制信号定义PUL:步进脉冲信号输入端DIR:步进方向信号输入端+5V:信号输入共阳端ENBL:脱机使能信号输入端脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
2、控制信号连接上位机的控制信号可以高电平有效,也可以低电平有效兼容3.5~28V。
当高有效时,把所有控制信号的负端连在一起作为信号地,低有效时,把所有控制信号的正端连在一起作为信号公共端。
现在以集电极开路和PNP输出为例,接口电路示意图如下:图1. 输入接口电路(共阳极接法)图2. 输入接口电路(共阴极接法)控制器PNP输出三、功能选择(用驱动器面板上的DIP开关实现)1、设置电机每转步数驱动器可将电机每转的步数分别设置为200、400、800、1600、3200、6400步。
用户可以通过驱动器正面板上的拨码开关的SW1、SW2、SW3位来设置驱动器的步数(Pulse/rev)如表1:2、控制方式选择自动半流功能半流功能是指无步进脉冲500ms后,驱动器输出电流自动降为额定输出电流的70%,用来防止电机发热。
3、设置输出相电流为了驱动不同扭矩的步进电机,用户可以通过驱动器面板上的拨码开关SW4、SW5、SW6位来设置驱动器的输出相电流(有效值)单位安培,各开关位置对应的输出电流,不同型号驱动器所对应的输出电流值不同。
两相混合式步进电机驱动器SD-2H044MA概述 DescriptionsSD系列步进电机及驱动器是由本公司最新推出的高科技产品。
随着电子技术的高速发展,电子产品的工艺和性能也不断更新和提高,本产品采用超大规模的硬件集成电路,具有高度的抗干扰性及快速的响应性,从根本上解决了传统步进电机低速爬行、存在共振区、噪音大、高速力矩小、启动频率低及驱动器可靠性差等缺点。
特点 Features●先进的双极性恒流斩波驱动技术。
●高速力矩输出提高40%,避免丢步(空载启动速度达300~420r/min)最高转速达3500 r/min。
●灵活的输出电流设定,适配不同型号电机,同时具备自动半电流功能,减少电机发热。
●最大128细分设定,满足各种机械传动,而且不影响其输出力矩。
●输入脉冲模式设定及高低电平设定,便于用户使用。
●保护功能全:输入电源过压、欠压、输出过流、相间短路、驱动器高温等报警保护功能。
●电机低速无爬行现象,噪音小,无共振区。
性能指标 Mechanical Dimensions电气性能(环境温度Tj=25ºC时)输入电源24~50V直流电源供电,容量:不小于200VA。
典型值:DC36V输出电流 1.13A~4.25A,8档可调,分辨率0.41A。
驱动方式双极恒流PWM驱动输出。
绝缘电阻常温常压下>500MΩ。
绝缘强度常温常压下500V/分钟。
重量约300克。
细分设定表SW5 SW6 SW7 SW8 每转脉冲步距角SW5 SW6 SW7 SW8 每转脉冲步距角OFF ON ON ON 400 0.900 ºOFF ON OFF ON 6400 0.05625 ºON OFF ON ON 800 0.450 ºON ON OFF OFF 8000 0.045ºON ON ON OFF 1000 0.360 ºOFF ON OFF OFF 10000 0.036 ºOFF OFF ON ON 1600 0.225 ºON OFF OFF ON 12800 0.028125 ºOFF ON ON OFF 2000 0.180 ºON OFF OFF OFF 20000 0.018 ºON ON OFF ON 3200 0.1125 ºOFF OFF OFF OFF 25000 0.0144 ºON OFF ON OFF 4000 0.090ºOFF OFF OFF ON 25600 0.014063 ºOFF OFF ON OFF 5000 0.072 º适配电机:39BYG / 42BYG / 57BYG / 60BYG安装尺寸图33.5mm9.5mm104mm 120mm5mm92mm25mm27mm112mmΦ3.5mm80mm。