机械运动参数测定实验指导书
- 格式:doc
- 大小:110.50 KB
- 文档页数:4

实验指导书GUIDE BOOK FOR EXPERIMENT张云文李海涛姚海蓉编著AND目录CONTENTS说明 (1)前言 (2)实验一 机构运动简图测绘实验 (3)实验二 机构运动参数测试实验 (6)实验三 机构组合创新设计实验 (12)实验四 转子动平衡实验 (16)附录1 PCL-812PG数据采集与分析系统使用说明 (19)附录2 机构应用工程实例 (21)说明Brief Instruction机械原理是机械类专业的一门主干技术基础课,强调与工程实践应用相结合,以帮助培养同学们分析和解决工程实际问题的能力。
实验环节是课程的重要实践环节,不仅可以籍此巩固理论知识,而且对培养同学们的工程实践认知能力和创新能力具有重要意义。
机械原理共56学时。
理论教学50学时,实验学时6学时。
根据国家教委“高等工业学校机械设计基础课程的教学基本要求”,以我校的教学计划为依据,本着“培养学生综合设计能力”的教学宗旨,开设了机构运动简图测绘实验(实验一)、机构运动参数测试实验(实验二)、机构组合创新设计实验(实验三)、转子动平衡实验(实验四)作为机械原理的基本实验内容。
其中,动平衡实验由于设备老化,目前设备达到的教学效果完全可以由课内教学实现,因此目前该实验暂时取消。
待购置现代动平衡试验设备后即可随时开设。
此外,已在部分班级试点选修实验——范成实验的计算机虚拟实现、选做研究项目运动参数测试实验台的软硬件改进设计等。
同时,还拟开设选修实验——范成实验的模型实现,综合性、开放性实验——运动方案分析实验。
这部分实验内容暂时单独成篇,待条件成熟即可列入本实验指导书。
附录2中的机构应用工程实例是为了开阔同学们的视野,其实是工程实际中实现某种功能的一个运动方案,而决不是唯一的、或最好的解。
实验考核成绩分预习、实验操作、实验报告三部分。
实验成绩并入课程总成绩,约占10%。
为便于同学们预习,了解实验内容,完成实验报告,特编著本实验指导书。

实验四机构运动参数测试一、实验目的1.通过运动参数测试实验,掌握机构运动的周期性变化规律,并学会机构运动参数如位移、速度和加速度(包括角位移、角速度和角加速度)的实验测试方法;2.通过利用传感器、工控机等先进的实验技术手段进行实验操作,训练掌握现代化的实验测试手段和方法,增强工程实践能力;3.掌握原动件运动规律不变,改变机构各构件尺寸,从动件运动参数的测量方法;4.通过进行实验结果与理论数据的比较,分析误差产生的原因,增强工程意识,树立正确的设计理念。
二、实验装置1.实验装置的组成实验装置系统框图如图1所示,它由以下几部分组成。
图12.实验装置的特点该实验以培养学生的综合设计能力、创新设计能力和工程实践能力为目标。
打破了传统的演示性、验证性、单一性实验的模式,建立了新型的设计型、搭接型、综合性的实验模式。
本实验提供多种搭接设备,学生可根据功能要求,自己进行方案设计,并将自己设计的方案亲手组装成实物模型。
形象直观,安装调整简捷,并可随时改进设计方案,从而培养学生的创造性和正确的设计理念。
3.实验装置的功用实验中,可组合出:①曲柄滑块;②双曲柄;③摆动导杆;④曲柄摇杆;⑤滑块为输出构件的简单的平面六杆机构(组合机构);⑥直动导杆凸轮机构;⑦摆动凸轮机构和动力学调速实验台等多种典型的运动机构;另外,各构件尺度参数可调,突出了测试机构的尺寸参数的多变性,如:在曲柄滑块机构中设计了偏心块构件,可将对心式曲柄滑块机构变位偏置式曲柄滑块机构;在双曲柄机构中,可调节连杆尺寸使之变为平行四边形机构等。
这样可增加学生的实验题目和测试目标,使同学在实验中充分理解尺寸参数有、原动件运动规律等因素对机构运动学方面的影响,巩固学生在课堂中所学知识,使之产生感性认识,增加对机械学研究的兴趣,同时达到一机多用的目的。
4.实验装置主要技术参数(1)电机额定功率和电机转速机构运动参数测试实验装置电机参数:功率:40W。
电机转速:1300r/min。
一、实验目的1.掌握曲柄摇杆机构和曲柄滑块机构实现动平衡的原理和常用方法;2.了解机构运动参数测试系统的基本硬件组成;3.了解常用机械量(线位移、角位移、转速、机座振动加速度)的测试方法;4.通过工程测试,定量了解铰链四杆机构和对心曲柄滑块机构的运动特性;5.了解传感器的工作原理、用于信号采集和分析的专业软件。
二、实验设备1.曲柄滑块机构实验台、曲柄摇杆机构实验台;2.计算机,CRAS V5.1 随机信号振动分析软件;3.工具、平衡配重块。
三、实验内容1.根据给定的机构参数计算所要添加平衡块的质量和相位;2.安装平衡块,测试机构平衡后的机架水平方向振动加速度;3.不装平衡块或随意添加平衡块,测试机构不平衡时的机架水平方向振动加速度;4.测试曲柄转速、摇杆角位移或滑块线位移。
四、实验原理1.机构的平衡(1)利用平衡质量对曲柄滑块机构进行不完全平衡对于机构中作往复运动和平面复合运动的构件,在运动中产生的惯性力和惯性力矩不能在构件本身加以平衡,而必须对整个机构进行平衡,设法使各运动构件惯性力的合力以及合力偶达到完全的或部分的平衡。
平衡的方法:利用对称机构平衡、利用平衡质量平衡、利用非完全对称机构平衡、利用弹簧平衡等。
0;0=∑=∑I I M F 机构平衡的条件是:通过机构质心的总惯性力F I 和总惯性力偶矩M I 分别为零,即:m ′= m B L AB /r ——平衡m B 产生的离心惯性力F IB ;m 〞=k·m C L AB /r ——部分平衡m C 产生的往复惯性力F IC !四、实验原理(2)利用平衡质量对曲柄摇杆机构进行完全平衡1.机构的平衡m′= (m2B L AB+m1L AS1)/r′使构件1的质心S1 移到固定轴A 处;m〞= m2L BS2/L BC使构件1的质心S1移到固定轴D处;此时,机构的总质心S应位于AD 线上一固定点,即:a s=0 机构的惯性力得到完全平衡。

机构运动参数测定与分析实验实验2 四杆机构运动参数测量与动态性能分析之一本实验通过测量一四杆机构从动件的运动规律,学习用实验方法研究简单机械的运动性能。
培养分析实验结果的能力。
一、实验目的1、了解曲柄摆杆机构运动特点。
2、了解摆杆运动参数测量原理与方法。
3、把实验结构与理论计算机结构比,分析二者不完全相同的原因*4、初步了解构件弹性对机构运动性能的影响。
二、设备与工具GD —1型机构动态实验台是一个多功用的实验台,它可以用研究刚性机构的运动规律也可用于研究弹性机构的运动规律。
它可以研究构件尺寸对运动规律的影响,也可以研究构件弹性对构件的影响和在不同转速下构件的弹性动力效应。
本次实验只运用该设备测量在杆件尺寸确定的情况下,摆杆的运动规律,包括摆杆角位移、角速度、角加速度,与理论计算结果进行比较。
图2—1为实验设备框图,其中四杆机构为核心部分,其机构简图如图2—2所示。
机构尺寸为:05.030±=AB L ;2.0142±=BC L ;1.05.263±=CD L 。
固定件AD L 为可调尺寸。
当轴承座对准机座上的刻度时,1.0330±=AD L 。
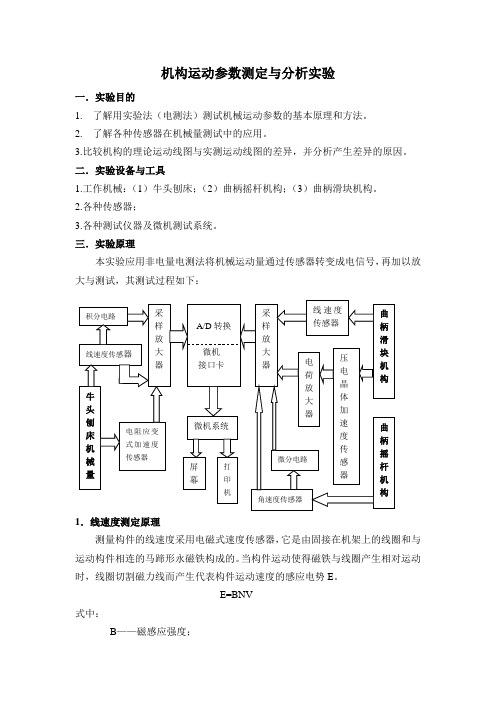
图2-1 实验设备框图图2-2曲柄摆杆机构四杆机构中,曲柄为主动件,它由一台Z2—11直流电机驱动,其转速可用一台KZD —1型可控硅调速器进行无级调速。
摆杆CD 为从动件,它的运动由D 轴输出,输出的运动规律可可控硅调速器信号电路A/D 转换 TP801单板计算机打印机 CJD 角位移传感四杆机构Z2--11直流电机 直流稳压电源A BCD θ通过安装在轴端的传感器测量。
三、原理和方法本实验设备中所采用的CJD 角位移传感器是根据电位计式变换器的测量原理设计的。
其工作原理如图2—3I 部分 中所示。
图2—3 测量原理图摆杆的角位移通过传感器内部的机械结构带动原理图中的电刷在电位器上滑动。
因此,有相应的讯号输出达到测量角度的目的。
实验一、机构运动参数的测试和分析实验一、实验目的1.掌握机构运动的周期性变化规律,并学会机构运动参数如位移、速度和加速度等的测试原理和方法;2. 学会运用多通道通用实验仪器、传感器等先进实验技术手段开展实验研究的方法;3. 利用计算机对平面机构动态参数进行采集、处理,作出实测的动态参数曲线,并通过计算机对该平面机构的运动进行数值仿真,作出相应的动态参数曲线,从而实现理论与实际的紧密结合。
二、实验内容1.测试曲柄导杆机构、曲柄滑块机构、凸轮机构等机构的构件转角、移动位移等运动参数;2.比较实测参数曲线与理论仿真曲线的差异。
三、实验仪器QTD-III型曲柄、导杆、凸轮组合实验台该组合实验装置,只需拆装少量零部件,即可分别构成四种典型的传动系统。
他们分别是曲柄滑块机构、曲柄导杆机构、平底直动从动杆凸轮机构和滚子直动从动杆凸轮机构。
具体结构示意图如下图所示。
(a)曲柄滑块机构(b)曲柄导杆机构(c)平底直动从动件凸轮机构(d)滚子直动从动件凸轮机构1、同步脉冲发生器2、涡轮减速器3、曲柄4、连杆5、电机6、滑块7、齿轮8、光电编码器9、导块10、导杆11、凸轮12、平底直动从动件13、回复弹簧14、滚子直动从动件15、光栅盘四、实验原理本实验仪由单片机最小系统组成。
外扩 16 位计数器,接有 3 位 LED 数码显示器可实时显示机构运动时曲柄轴的转速,同时可与 P C 机进行异步串行通讯。
在实验机构动态运动过程中,滑块的往复移动通过光电脉冲编码器转换输出具有一定频率(频率与滑块往复速度成正比),0-5伏电平的两路脉冲,接入微处理器外扩的计数器计数,通过微处理器进行初步处理运算并送入 P C 机进行处理,P C 机通过软件系统在CRT上可显示出相应的数据和运动曲线图。
机构中还有两路信号送入单片机最小系统,那就是角度传感器(同步脉冲发生器)送出的两路脉冲信号。
其中一路是光栅盘每20。
一个角度脉冲,用于定角度采样,获取机构运动线图;另一路是零位脉冲,用于标定采样数据时的零点位置。
机械设计实验指导书 - 图文二OO八年十月实验一机械传动性能综合测试实验一、实验目的1.通过测试常见机械传动装置在传递运动与动力过程中的参数曲线(速度曲线、转矩曲线、传动比曲线、功率曲线及效率曲线等),加深对常见机械传动性能的认识和理解;2. 通过测试常见机械传动组成的不同传动系统的参数曲线,掌握机械传动合理布置的基本要求;3. 通过实验认识智能化机械传动性能综合测试实验台的工作原理,掌握计算机辅助实验的新方法, 培养进行设计性实验与创新性实验的能力。
二、实验设备本实验在“JCY机械传动性能综合测试实验台”上进行。
本实验台采用模块化结构,不同种类的机械传动装置、联轴器、变频电机、加载装置和工控机等模块组成,学生可以根据选择或设计的实验类型、方案和内容,自己动手进行传动连接、安装调试和测试,进行设计性实验、综合性实验或创新性实验。
机械传动性能综合测试实验台各硬件组成部件的结构布局如图2-1所示。
1 2 3 2 4 2 3 2 5 6 8 7 图2-1实验台的结构布局1-变频调速电机2-联轴器 3-转矩转速传感器4-试件 5-加载与制动装置 6-工控机 7-电器控制柜8-台座实验台组成部件的主要技术参数如表2-1所示。
2表2-1主要技术参数序号 1 2 组成部件变频调速电机 ZJ型转矩转速传感器 550W Ⅰ.规格 ; 输出讯号幅度不小于100mV Ⅱ.规格 ; 输出讯号幅度不小于100mV 直齿圆柱齿轮减速器 i=5 摆线针轮减速器蜗杆减速器 i=10 V型带传动齿形带传动 Pb= Zb=80 套筒滚子链传动 Z1=17 Z2=25 额定转矩: 50 激磁电流: 2A 允许滑差功率: 技术参数备注 3 机械传动装置(试件) 1台 1台 WPA50-1/10 O型带3根 1根 08A型3根4 5 磁粉制动器工控机为了提高实验设备的精度,实验台采用两个扭矩测量卡进行采样。
测量精度达到±%FS,能满足教学实验与科研生产试验的实际需要。
实验二机械运动参数测定实验指导书一、实验目的:1.通过实验了解:位移、速度、加速度测定方法。
角位移、角速度、角加速度的测定方法;转速及回转不均匀系数的测量方法。
2.通过实验初步了解“机械动态参数测定实验台”及光电脉冲编码器、同步脉冲发生器(或称角度传感器)的基本原理,并掌握它们的使用方法。
3.通过比较理论运动线图与实测运动线图的差异,并分析其原因,增加对速度、角速度、特别是加速度、角加速度的感性认识。
二、实验台简介:1、主要技术参数1) 曲柄原始参数:曲柄AB 的长度LAB:可调0.04~0.06m。
曲柄质心S1 到A 点的距离LAS1=0。
平衡质点P1 到A 点的距离LAP10.04~0.05:可调。
曲柄AB 的质量(不包括MP1)M1=2.55kg。
曲柄AB 绕质心S1的转动惯量(不包括MP1)JS1=0.00475kgm2。
P1点上的平衡质量MP1可调。
2) 连杆原始参数:连杆BC 的长度LBC:可调0.27~0.30m。
连杆质心S2到 B 点的距离LBS2=LBC/2。
连杆BC 的质量M2=0.55kg。
连杆绕质心S2的转动惯量JS2=0.0045kgm2。
3) 摇杆原始参数:摇杆CD 的长度LCD=0.13~0.18m。
摇杆质心S3到C 点的距离LAS3=0.14m。
平衡质点P3到 C 点的距离LAP3:可调。
摇杆CD 的质量(不包括MP3)M3=0.624kg。
摇杆CD 绕质心S3的转动惯量(不包括MP3)JS3=0.05kgm2。
P3点上的平衡质量MP3:可调。
4) 机架原始参数:机架铰链的距离LAD=0.34m。
浮动机架的总质量M4=32.65kg。
加速度计的方向角а:可调0~3600。
5)连杆原始参数:连杆DE 的长度L DE:可调0.27~0.31m。
连杆质心S4到D 点的距离L BS4=0.15m。
连杆DE 的质量M4=0.55kg。
连杆绕质心S4的转动惯量J S4=0.0045kgm2。
实验二机械运动参数测定实验指导书
一、实验目的:
1.通过实验了解:位移、速度、加速度测定方法。
角位移、角速度、角加速度的测定方法;转速及回转不均匀系数的测量方法。
2.通过实验初步了解“机械动态参数测定实验台”及光电脉冲编码器、同步脉冲发生器(或称角度传感器)的基本原理,并掌握它们的使用方法。
3.通过比较理论运动线图与实测运动线图的差异,并分析其原因,增加对速度、角速度、特别是加速度、角加速度的感性认识。
二、实验台简介:
1、主要技术参数
1) 曲柄原始参数:曲柄AB 的长度LAB:可调0.04~0.06m。
曲柄质心S1 到A 点的距离LAS1=0。
平衡质点P1 到A 点的距离LAP10.04~0.05:可调。
曲柄AB 的质量(不包括MP1)M1=2.55kg。
曲柄AB 绕质心S1的转动惯量(不包括MP1)JS1=0.00475kgm2。
P1点上的平衡质量MP1可调。
2) 连杆原始参数:连杆BC 的长度LBC:可调0.27~0.30m。
连杆质心S2到 B 点的距离LBS2=LBC/2。
连杆BC 的质量M2=0.55kg。
连杆绕质心S2的转动惯量JS2=0.0045kgm2。
3) 摇杆原始参数:摇杆CD 的长度LCD=0.13~0.18m。
摇杆质心S3到C 点的距离LAS3=0.14m。
平衡质点P3到 C 点的距离LAP3:可调。
摇杆CD 的质量(不包括MP3)M3=0.624kg。
摇杆CD 绕质心S3的转动惯量(不包括MP3)JS3=0.05kgm2。
P3点上的平衡质量MP3:可调。
4) 机架原始参数:机架铰链的距离LAD=0.34m。
浮动机架的总质量
M4=32.65kg。
加速度计的方向角а:可调0~3600。
5)连杆原始参数:连杆DE 的长度L DE:可调0.27~0.31m。
连杆质心S4到D 点的距离L BS4=0.15m。
连杆DE 的质量M4=0.55kg。
连杆绕质心S4的转动惯量J S4=0.0045kgm2。
6)滑块 5 原始参数:滑块质量M5=0.3kg。
偏距值(上为正)e:可调0~0.035m。
7) 动力原始参数:电动机(曲柄)的额定功率P:90w。
电动机(曲柄)的特性系数G=9.724rpm/Nm。
许用速度不均匀系数δ:按机械要求选取。
仿真计算步长DΦ:按计算精度选取。
2、功能及特点:
1)、可测量曲柄、摇杆的运动学参数和机架振动参数,并通过计算机多媒体虚拟仪表显示其速度,加速度波
形图。
2)、可通过计算机多媒体仿真软件计算曲柄、摇杆的真实运动规律和机架振动规律,并显示其速度,加速度波形图,可与实测曲线比较分析。
3)、配有专用的多媒体教学软件,学生可在软件前面说明文件的指导下,独立自主地进行实验。
4)、多媒体软件还包括曲柄摇杆机构设计和连杆曲线的运动图,将测试、仿真与设计分析结合起来。
5)、机构中活动构件杆长可调节,平衡质量大小位置可调节,飞轮转动惯量调节,使机构运动特性达到最佳。
三、实验内容:
通过数模计算得出摇杆的真实运动规律,作出摇杆相对曲柄转角的角速度线图,角加速度线图。
通过摇杆上的角位移传感器,曲柄上的角位移传感器和 A/D 转换板进行数据采集,转换和处理,输入计算机,显示出实测的摇杆相对曲柄转角的角速度线图和角加速度线图。
通过分析比较,使学生了解机构结构对摇杆的速度波动和急回特性的影响。
四、实验步骤:
1、测量并绘制曲柄导杆滑块机构机构运动简图,记录各构件尺寸。
2、启动实验台,调节调速旋钮,使机构处于运行状态。
3、打开计算机,单击“曲柄导杆滑块机构”图标,进入曲柄导杆滑块机构运动测试设计仿真综合试验台软
件系统的封面。
单击左键,进入曲柄导杆滑块机构动画演示界面。
4、在曲柄导杆滑块机构动画演示界面右下方单击“曲柄导杆滑块机构”键,进入曲柄导杆滑块机构原始参
数输入界面,根据测绘的机构运动简图,输入相应的构件尺寸。
5、在曲柄导杆机构原始参数输入界面左下方单击选定的实验内容,滑块运动仿真,进入选定实验的界面。
6、在选定的实验内容的界面左下方单击“仿真”,动态显示机构即时位置和动态的速度,加速度曲线图。
单击“实测”,进行数据采集和传输,显示实测的速度,加速度曲线图。
若动态参数不满足要求或速度波动过大,
有关实验界面均会弹出提示,“不满足!”,及有关参数的修正值。
7、如果要打印仿真和实测的速度,加速度曲线图,在选定的实验内容的界面下方单击“打印”键,打印机
自动打印出仿真和实测的速度,加速度曲线图。
8、如果要做其他实验,或动态参数不满足要求,在选定的实验内容的界面下方单击“返回”,返回曲柄摇
杆机构原始参数输入面,校对所有参数并修改有关参数,单击选定的实验内容键,进入有关实验界面。
以下步骤
同前。
9、如果实验结束,单击“退出”,返回Windows 界面。
曲柄导杆滑块机构原始参数输入界面
在该界面上输入的参数包括:曲柄、导杆、连杆的长度、质量和转动惯量,滑块 2 的质量,滑块 5 的质量、
各按键说明:
[曲柄运动仿真]:单击此键,进入曲柄运动仿真与测试分析界面。
[滑块运动仿真]:单击此键,进入滑块运动仿真与测试分析界面。
[机架运动仿真]:单击此键,单击其上的[确定],进入机架运动仿真与测试分析界面。
[说明]:单击此键,弹出曲柄导杆滑块机构原始参数说明以及该界面操作说明框。
[加速]:单击此键,曲柄转速逐步增加。
[减速]:单击此键,曲柄转速逐步减小。
[返回]:单击此键,返回曲柄导杆滑块机构动画演示界面。
[退出]:单击此键,结束程序的运行,返回WINDOWS 界面。
4)滑块运动仿真与测试分析界面
该界面开有曲柄导杆滑块机构运动模拟窗口、滑块真实运动仿真窗口和滑块真实运动测试窗口(如图)。
各控键说明如下:
[仿真]:单击此健可以看到曲柄导杆滑块机构运动模拟图及滑块真实运动规律曲线和仿真结果。
[实测]:单击此键可以看到实测时的滑块运动规律曲线及实测结果。
[说明]:单击此键,弹出滑块真实运动仿真及测试分析说明以及该界面操作说明框。
[打印]:单击此键,弹出打印对话框,将滑块真实运动仿真曲线图和实测曲线图打印出来或保存为文件。
[返回]:单击此键,返回曲柄导杆滑块机构原始参数输入界面。
[退出]:单击此键,结束程序的运行,返回WINDOWS 界面。
五、思考题
1.分析曲柄摇杆机构曲柄长度对摇杆运动参数的影响。
2.分析曲柄导杆机构机架长度及滑块偏置尺寸对运动参数的影响。
3.测绘出曲柄摇杆机构或曲柄导杆滑块机构简图尺寸,利用计算机求出摇杆或滑块的运动参数,绘出运动线
图,与实测曲线对比。
4.了解其它实验手段测定机械运动参数方法,并进行比较。