哈工大一阶倒立摆
- 格式:doc
- 大小:1.21 MB
- 文档页数:23


基于双闭环PID控制的一阶倒立摆控制系统设计一阶倒立摆是一种常见的控制系统,它由一个旋转臂和一个悬挂在旋转臂末端的摆杆组成。
控制目标是使摆杆保持垂直位置并保持在指定的角度范围内。
本文将基于双闭环PID控制设计一阶倒立摆控制系统,并对其进行详细的分析和讨论。
首先,我们需要明确控制系统的结构。
一阶倒立摆控制系统可以分为两个闭环:内环和外环。
内环用于控制旋转臂的角度,并将输出作为外环的输入。
外环用于控制摆杆的角度,并根据测量的摆杆角度和设定的目标角度来调整内环的输入。
在进行控制系统设计之前,我们需要先建立一阶倒立摆的数学模型。
假设倒立摆的质量集中在摆杆的一端,摆杆的长度为L,质量为m,摩擦系数为b,重力加速度为g。
通过应用牛顿第二定律,可以得到如下动力学方程:mL²θ¨ + bLθ˙ + mgLsinθ = u其中,θ是旋转臂的角度,u是旋转臂的扭矩。
为了简化方程,我们进行恒定参数修正和线性化处理,得到线性方程:θ¨ + 2ξωnθ˙ + ωn²θ = kru其中,ξ是阻尼比,ωn是无阻尼自然频率,kr是旋转臂的增益。
接下来,我们将按照以下步骤设计基于双闭环PID控制的一阶倒立摆控制系统:1.内环设计:-选择合适的内环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
可以使用试错法、经验法、系统辨识等方法进行参数调整。
-将PID控制器的输入设置为旋转臂角度误差,输出为旋转臂的扭矩。
2.外环设计:-选择合适的外环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
-将PID控制器的输入设置为摆杆角度误差,输出为旋转臂的角度设定值。
3.进行系统仿真和调试:-使用MATLAB等仿真工具建立一阶倒立摆的数学模型,并将设计的控制器与模型进行集成。
-调整控制器的参数,以满足性能指标和系统稳定性的要求。

291. 概述自动控制理论(包括古典部分和现代部分)是电气工程系学生的一门必修专业基础课,课程中的一些概念相对比较抽象,如系统的稳定性、可控性、收敛速度和抗干扰能力等。
倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定系统,作为控制系统的被控对象,它是一个理想的教学实验设备,许多抽象的控制概念都可以通过倒立摆直观地表现出来。
本课程设计的目的是让学生以一阶倒立摆为被控对象,了解用古典控制理论设计控制器(如PID 控制器)的设计方法和用现代控制理论设计控制器(极点配置)的设计方法,掌握MATLAB 仿真软件的使用方法及控制系统的调试方法,加深学生对所学课程的理解,培养学生理论联系实际的能力。
本课程设计的被控对象采用固高公司生产的GIP-100-L 型一阶倒立摆系统,课程设计包括三方面的内容:(1)建立直线一级倒立摆的线性化数学模型;(2)倒立摆系统的PID 控制器设计、MATLAB 仿真及实物调试;(3)倒立摆系统的状态空间极点配置控制器设计、MATLAB 仿真及实物调试。
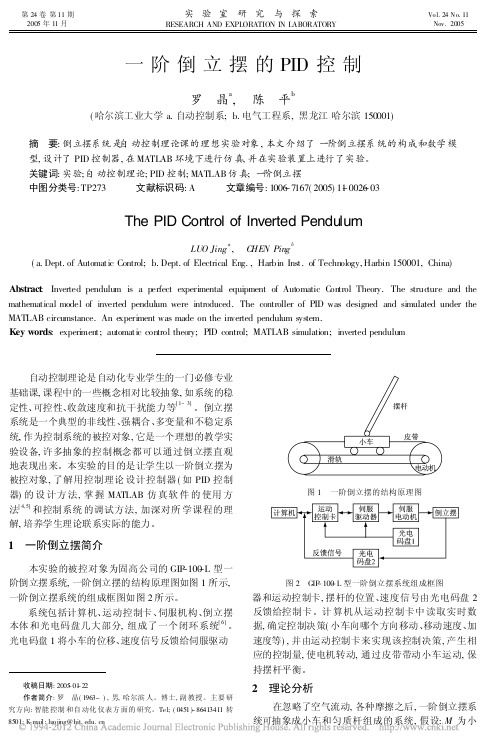
1.1 实验设备简介一级倒立摆系统的结构示意图如图1-1所示。
小车滑轨皮带电机摆杆图1-1 一阶倒立摆结构示意图系统组成框图如图1-2所示。
图1-2 一级倒立摆系统组成框图系统是由计算机、运动控制卡、伺服机构、倒立摆本体和光电码盘几大部分组成的闭环系统。
光电码盘1将小车的位移、速度信号反馈给伺服驱动器和运动控制卡,摆杆的角度、角速度信号由光电码盘2反馈给运动控制卡。
计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现29该控制决策,产生相应的控制量,使电机转动,通过皮带,带动小车运动,保持摆杆平衡。
1.2设计内容1.2.1.建立一级倒立摆数学模型在《自动控制理论》课程中,有一章专门讲述控制系统的数学模型的建立方法,并将非线性数学模型在一定条件下化简成线性数学模型,在此以一级倒立摆为例,建立其数学模型,并在摆角0=φ附近将其非线性数学模型线性化,学生通过实际数学模型的推导,熟悉机理建模的一般方式,加深对控制对象的理解。

一阶倒立摆的控制方法
一阶倒立摆是一种非常有趣的机械系统,它提供了在控制和稳定化方面的许多挑战。
一阶倒立摆的控制方法取决于许多因素,包括机械结构、系统响应、控制信号和传感器输入等。
在一阶倒立摆中,一个质点在垂直支撑物上平衡,支撑物可以是摆锤也可以是其他机械结构。
在“正常”情况下,质点的位置会小幅度波动,但总体上保持平衡。
在不正常的情况下,例如外力干扰或系统响应问题,质点的位置可能会失去平衡,导致设备失效。
为了解决这些问题,一些常见的控制方法包括PID控制、神经网络控制和模糊控制等。
其中,最常用的PID控制方法是基于比例、积分和微分控制来实现的。
这种方法可以计算出当前状态和目标状态的差异,然后调节偏差的大小和方向,以让设备回归到稳定状态。
另一种常见的控制方法是神经网络控制。
这种方法的理念是通过构建一个基于神经网络结构的模型来控制设备。
神经网络具有学习和记忆功能、非线性映射和复杂的自适应能力等特点,可以较好地应对一阶倒立摆的不稳定性与外部干扰的问题。
最后,模糊控制是一种模糊数学技术,它可以将输入和输出模糊化,以便通过一系列规则来达到控制目标。
模糊控制方法较为简单,但需要有丰富经验和良好的控制规则,否则很容易导致控制结果的不稳定性。
总的来说,在一阶倒立摆的控制中,各种方法都有自己的优缺点。
开发一种切实可行的控制方法需要考虑到各种因素,包括系统响应时间、控制稳定性、控制信号噪声干扰、成本等等。
因此,为了实现一
阶倒立摆的各种应用,需要有较为全面的控制方案和少量控制策略的
实践应用。

第24卷第11期2005年11月实验室研究与探索RESEARCH AND EXPLORATION IN LABORATORYVol.24No.11 Nov.2005一阶倒立摆的PID 控制罗 晶a, 陈 平b(哈尔滨工业大学a.自动控制系; b.电气工程系,黑龙江哈尔滨150001)摘 要:倒立摆系统是自动控制理论课的理想实验对象,本文介绍了一阶倒立摆系统的构成和数学模型,设计了PID 控制器,在MATLAB 环境下进行仿真,并在实验装置上进行了实验。
关键词:实验;自动控制理论;PID 控制;MATLAB 仿真;一阶倒立摆中图分类号:TP273文献标识码:A 文章编号:1006-7167(2005)11-0026-03The PID Control of Inverted PendulumLUO Jing a, C HE N Pingb(a.Dept.of Automatic Control; b.Dept.of Electrical Eng.,Harbin Inst.of Technology,Harbin 150001,China)Abstract :Inverted pendulum is a perfect experimental equipment of Automatic C ontrol Theory.The struc ture and the mathematical model of inverted pendulum were introduced.The controller of PID was designed and simulated under the MATLAB circumstance.An e xperiment was made on the inverted pendulum system.Key words :experiment;automatic control theory;PID control;MATLAB simulation;inverted pendulum收稿日期:2005-01-22作者简介:罗 晶(1963-),男,哈尔滨人。
基于双闭环PID控制的一阶倒立摆控制系统设计一、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。
二、设计要求倒立摆的设计要使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用 MATLAB进行仿真,并用simulink对相应的模块进行仿真。
三、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡。
四、设计步骤首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图下面的工作是根据结构框图,分析和解决各个环节的传递函数!1.一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中: M :小车质量 m :为摆杆质量 J :为摆杆惯量 F :加在小车上的力 x :小车位置θ:摆杆与垂直向上方向的夹角l :摆杆转动轴心到杆质心的长度根据牛顿运动定律以及刚体运动规律,可知: (1) 摆杆绕其重心的转动方程为(2) 摆杆重心的运动方程为得sin cos ..........(1)y x J F l F l θθθ=-2222(sin ) (2)(cos ) (3)x y d F m x l d td F mg m l d t θθ=+=-(3)小车水平方向上的运动为22..........(4)x d xF F M d t-=联列上述4个方程,可以得出一阶倒立精确气模型:()()()()()()()2222222222222222sin .sin cos cos cos .sin cos .lg sin cos J ml F ml J ml m l g x J ml M m m l ml F m l M m m m l M m J ml θθθθθθθθθθθθ⎧+++-⎪=++-⎪⎨+-+⎪=⎪-++⎩式中J 为摆杆的转动惯量:32ml J =若只考虑θ在其工作点附近θ0=0附近(︒︒≤≤-1010θ)的细微变化,则可以近似认为:⎪⎩⎪⎨⎧≈≈≈1cos sin 02θθθθ ⎪⎪⎩⎪⎪⎨⎧++-+=++-+=2..2222..)(lg )()()(Mml m M J mlF m m M Mml m M J g l m F ml J x θθθ 若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2 l =1m,重力加速度取g=2/10s m ,则可以得 一阶倒立摆简化模型:....0.44 3.330.412x F F θθθ⎧=-⎪⎨⎪=-+⎩即 G 1(s)= ; G 2(s)=一阶倒立摆环节问题解决!2.电动机驱动器选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下:222()0.4()12() 1.110()s F s s x s s s s θθ-⎧=⎪-⎪⎨-+⎪=⎪⎩驱动电压:U=0~100V 额定功率:PN=200W 额定转速:n=3000r/min 转动惯量:J=3×10-6kg.m2 额定转矩:TN=0.64Nm 最大转矩:TM=1.91Nm 电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s经传动机构变速后输出的拖动力为:F=0~16N ;与其配套的驱动器为:MSDA021A1A ,控制电压:UDA=0~±10V 。
一阶倒立摆系统模型分析状态反馈与观测器设计一阶倒立摆系统是控制工程中常见的一个具有非线性特点的系统,它由一个摆杆和一个质点组成,质点在摆杆上下移动,而摆杆会受到重力的作用而产生摆动,需要通过控制来实现倒立的功能。
以下是一阶倒立摆系统的模型分析、状态反馈与观测器设计的详细介绍。
一、系统模型分析:一阶倒立摆系统是一个非线性动力学系统,可以通过线性化的方式来进行模型分析。
在进行线性化之前,首先需要确定系统的状态变量和输入变量。
对于一阶倒立摆系统,可以将摆杆角度和质点位置作为状态变量,将水平推力作为输入变量。
在对系统进行线性化之后,可以得到系统的状态空间表达式:x_dot = A*x + B*uy=C*x+D*u其中,x是状态向量,u是输入向量,y是输出向量。
A、B、C和D是系统的矩阵参数。
二、状态反馈设计:状态反馈是一种常用的控制方法,通过测量系统状态的反馈信号,计算出控制输入信号。
在设计状态反馈控制器之前,首先需要确定系统的可控性。
对于一阶倒立摆系统,可以通过可控性矩阵的秩来判断系统是否是可控的。
如果可控性矩阵的秩等于系统的状态数量,则系统是可控的。
在确定系统可控性之后,可以通过状态反馈控制器来实现控制。
状态反馈控制器的设计可以通过选择适当的反馈增益矩阵K来实现。
具体的设计方法是,根据系统的状态空间表达式,将状态反馈控制器加入到系统模型中。
状态反馈控制器的输入是状态变量,输出是控制输入变量。
然后,通过调节反馈增益矩阵K的值,可以实现对系统的控制。
三、观测器设计:观测器是一种常用的状态估计方法,通过测量系统的输出信号,估计系统的状态。
在设计观测器之前,首先需要确定系统的可观性。
对于一阶倒立摆系统,可以通过可观性矩阵的秩来判断系统是否是可观的。
如果可观性矩阵的秩等于系统的状态数量,则系统是可观的。
在确定系统可观性之后,可以通过观测器来实现状态估计。
观测器的设计可以通过选择适当的观测增益矩阵L来实现。
具体的设计方法是,根据系统的状态空间表达式,将观测器加入到系统模型中。
闲聊倒立摆数学模型--2015思考与实践之(2)贾欣乐倒立摆是一个开环不稳定的系统,如果不加控制,重球离开其倒立平衡位置哪怕一点点,接着偏角θ就会出现崩溃式的增长,直到系统自动走向另一个平衡位置(稳定的“正立”位置)。
倒立摆的闭环控制相当困难,因而激发了诸多研究者的兴趣,该领域的文献可以说是汗牛充栋,不胜枚举。
倒立摆控制今日已被看作是检验控制器性能的一个标准化问题( a benchmark control problem)。
本文只讨论一级倒立摆的建模问题,不涉及控制器设计。
讨论也只是以不严密的闲聊的方式进行,与网友交流一下。
1. 一种常用的倒立摆建模方法从互联网下载了据称是哈尔滨工大的一份“课程设计说明书(论文):/p-700196752.html,其中一部分讨论了关于一级倒立摆数学模型建立机理,该例之特点是以摆杆取代了重球,其内容简述于下。
首先,建立受力“孤立体”:将小车和摆杆在铰链处切开,该处原为系统内力的水平分量F H及垂直分量F N均变成了外力(此处不考虑阻尼力矩),这两者分别以数值相等、方向相反的形式作用于小车与摆杆的孤立体上。
考虑小车孤立体的动力学关系,可得M ẍ= u - F H , (1) x是小车位移变量,M为其质量,u 为控制外力,由此知F H = u - M ẍ. (2)其次,考虑摆杆孤立体的力学“平衡”关系。
摆杆在水平方向上受力为F H = m d 2dt2(x + lsinθ) = m( ẍ+ lθcosθ - lθ2sinθ ), (3) 其中θ为摆杆的角偏移(相对于垂直线),l是摆杆的半长,m是摆杆质量。
由式(1)、(3)可得小车与摆杆整体水平向的运动模型(M+ m)ẍ+ mlθcosθ - mlθ2sinθ = u. (4)在垂直方向上摆杆受力的平衡关系为F N– mg = m d 2dt2(lcosθ) = - m( lθsinθ + θ2l cosθ ), (5) 故有F N = mg - m( lθsinθ + θ2cosθ ). (6)最后讨论摆杆的力矩平衡。
一阶倒立摆控制设计与实现一阶倒立摆是一种常见的控制系统模型,它由一个垂直的支柱和一个质量为m 的物体组成,物体通过支柱与地面相连。
在控制系统中,我们需要设计一个控制器来控制物体的位置和速度,使其保持在垂直位置上。
本文将介绍一阶倒立摆控制设计与实现的相关内容。
一、一阶倒立摆模型一阶倒立摆模型可以用以下方程描述:m*d^2y/dt^2 = -mg*sin(y) + u其中,y是物体的位置,u是控制器的输出,m是物体的质量,g是重力加速度,t是时间。
该方程可以通过拉普拉斯变换转换为传递函数:G(s) = Y(s)/U(s) = 1/(ms^2 + mg)二、控制器设计为了控制一阶倒立摆,我们需要设计一个控制器来产生控制信号u。
常见的控制器包括比例控制器、积分控制器和微分控制器,它们可以组合成PID控制器。
在本文中,我们将使用比例控制器来控制一阶倒立摆。
比例控制器的输出与误差成正比,误差越大,输出越大。
比例控制器的传递函数为:Gc(s) = Kp其中,Kp是比例增益。
三、闭环控制系统将控制器和一阶倒立摆模型组合起来,得到闭环控制系统的传递函数:G(s) = Y(s)/R(s) = Kp/(ms^2 + mg + Kp)其中,R(s)是参考信号,表示我们期望物体保持的位置。
四、控制系统实现在实现控制系统之前,我们需要对一阶倒立摆进行建模和仿真。
我们可以使用MATLAB等工具进行建模和仿真。
在MATLAB中,我们可以使用Simulink模块来建立一阶倒立摆模型和控制器模型。
在建立模型之后,我们可以进行仿真,观察系统的响应和稳定性。
在实现控制系统时,我们需要选择合适的硬件平台和控制器。
常见的硬件平台包括Arduino和Raspberry Pi等,常见的控制器包括PID控制器和模糊控制器等。
在实现控制系统之后,我们需要进行调试和优化,以达到最佳控制效果。
五、总结本文介绍了一阶倒立摆控制设计与实现的相关内容,包括一阶倒立摆模型、控制器设计、闭环控制系统和控制系统实现。