小水线面双体船的纵向运动稳定性研究_林政
- 格式:pdf
- 大小:636.18 KB
- 文档页数:4

运动稳定性的灵敏度分析研究
令狐选霞;徐德民;唐大军;潘光
【期刊名称】《舰船科学技术》
【年(卷),期】2001(000)006
【摘要】本文在研究和推导鱼雷纵向运动的特征方程基础上,对某型鱼雷的运动稳定性进行了分析;并在此基础上研究了鱼雷运动稳定性的灵敏度,提出了一种分析鱼雷运动稳定性的计算方法--特征根的灵敏度计算法,并且在文中给出了算例.
【总页数】5页(P30-34)
【作者】令狐选霞;徐德民;唐大军;潘光
【作者单位】西北工业大学航海工程学院;西北工业大学航海工程学院;西北工业大学航海工程学院;西北工业大学航海工程学院
【正文语种】中文
【相关文献】
1.潜艇水下运动稳定性非线性分析研究 [J], 戴余良;王长湖;苗海;刘祖源
2.小水线面双体船纵向运动稳定性的灵敏度分析 [J], 朱炳泉
3.静止气象卫星秸秆焚烧监测灵敏度分析研究 [J], 董晓锐;魏迎;王子洋
4.再生沥青混合料灰色关联和灵敏度分析研究 [J], 顾万;焦虎;敖顺通;王静;蔡祖洹;魏雪飞
5.一种非电传爆系统的全局灵敏度分析研究 [J], 程蕾;王晓鹏;夏艳;王宇锐;范新中因版权原因,仅展示原文概要,查看原文内容请购买。

小水线面双体船抗冲击特性数值研究高峰;况贶【摘要】文章介绍了小水线面双体船型的特点,阐述其在军事领域的应用和发展前景.运用数值仿真方法计算水下非接触爆炸作用下小水线面双体船的结构变形和冲击环境,分析此船型结构抗冲击特性和全船冲击环境特点,提出在抗冲击设计时的重点设计区域和优化方向,为其军事应用提供技术积累.%The characteristics of SWATH have been described in this paper, as well as its application and prospect in military field. The structural deformation and shock environment of SWATH in underwater non-contact explosion have been calculated by numerical stimulation method, and the overall ship's structural impact resistance and the shock environment have been analyzed. The specific design area and the optimization direction during the impact resistance design have been put forward, which could be the technical experience for its military application.【期刊名称】《船舶》【年(卷),期】2015(026)005【总页数】5页(P46-50)【关键词】小水线面双体船;结构抗冲击;冲击环境【作者】高峰;况贶【作者单位】海军装备部北京100841;海军驻上海沪东中华造船(集团)有限公司军代表室上海 200129【正文语种】中文【中图分类】U661.43引言小水线面双体船(SWATH船)是一型高科技、高附加值、高性能船舶。

小水线面双体无人船阻力数值模拟方法分析摘要:小水线面双体船是突破常规单体船以及双体船诸多性能限制的高性能船舶。
当前对小水线面双体船耐波性能研究大多集中于直支柱布局的耐波性预报。
但流体动力学的研究表明,斜支柱对船舶运动性能有很多有利影响。
针对斜支柱小水线面双体船水动力性能研究,Peng Qianl 运用 STE法,通过比较直支柱、倾斜支柱和 NPI 双体船的频率响应曲线,证明支柱倾斜可提高小水线面双体船的耐波性能,并通过比较数值模拟和实验结果,证明该船波浪增阻较小,因为倾斜支柱可利用波浪能量,减小船在波浪中的能量消耗。
Stefano Brizzolara等通过对斜支柱小水线面双体船的阻力优化研究,证明了斜支柱较传统小水线面双体船的优越性。
Latorre运用 Hooft 法研究了斜支柱小水线面双体船的运动性能,通过与实验的比较,得出粘性阻尼对于预报垂荡、纵摇峰值时具有重要影响的结论。
由此可知,对斜支柱小水线面双体船的水动力性能研究具有重要意义。
根据船舶在波浪中的运动理论,本文对比不同支柱倾斜角度的小水线面双体船在波浪中的运动响应,以探究不同支柱倾斜角度对耐波性的景响。
关键词:小水线面;双体无人船;阻力数值;模拟方法引言小水线面双体船(SWATH)由于改善了耐波性并提高了某些特定任务的作业效率,从而使美国海军对该类船产生了兴趣.由于该船型的新颖性,传统的设计方法已不适用。
因此,大卫泰勒研究中心投入了大量费用来研究其主要载荷、二次载荷和响应的合适标准.提出一个确定SWATH船最大波浪载荷的方法,并概括了用简单设计算法得到的结果吗,同时给出从模型试验得到的二阶砰击栽荷、主要结构应力分布的预报算法,以及替代常规钢质板格次要结构的轻型结构方案。
1.小水线面双体船概述1.1 小水线面双体船小水线面双体船,SmallWater planeAreaTwinHull,简称SWATH船,又叫半潜式双体船,其主要是由两个船体构成,且有水线面面积小等特点。

小水线面双体船横摇阻尼特性数值与试验研究孙小帅;姚朝帮;叶青【摘要】针对安装稳定鳍的小水线面双体船开展了零速静水自由横摇衰减数值与试验研究.通过不确定度分析验证数值计算方法的可靠性,进而对比船体的线性横摇阻尼和非线性横摇阻尼,并分析摩擦阻尼和稳定鳍对小水线面双体船横摇恢复力矩的影响规律.结果表明:由数值计算求得的自由横摇衰减曲线与试验结果吻合良好;在线性横摇运动假设下,线性横摇阻尼系数随着初始横倾角的增加而增大;将通过数值计算求得的非线性阻尼系数代入到非线性横摇运动方程中能准确地模拟船体的自由横摇衰减运动;摩擦阻尼和稳定鳍对小水线面双体船零速静水自由横摇时的横摇恢复力矩贡献很小.%A SWATH (small waterplane area twin hull) installed with stabilizing fins rolling freely in calm water was investigated by both numerical approach and experimental method.Uncertainty analysis was made to verify and validate the numerical method.Both linear roll damping and nonlinear roll damping were obtained and the contributions of the frictional damping and the stabilizing fins to the roll restoring moment were analyzed.The results illustrate that:the numerical free roll decay curve agrees well with the experiment;under the assumption of linear roll mode,the linear roll damping coefficient sees an upward trend with the increase of initial heel angle;the computed free roll decay curves using nonlinear damping coefficients agree well with the experimental results; the frictional damping and the stabilizing fins make minimal contributions to the roll restoring moment for the free roll decay motion in still water.【期刊名称】《国防科技大学学报》【年(卷),期】2017(039)006【总页数】9页(P71-78,142)【关键词】小水线面双体船;横摇阻尼;自由横摇衰减【作者】孙小帅;姚朝帮;叶青【作者单位】海军工程大学舰船工程系,湖北武汉 430033;海军工程大学舰船工程系,湖北武汉 430033;海军工程大学舰船工程系,湖北武汉 430033【正文语种】中文【中图分类】U661.1船舶在波浪中的横摇运动相比其他自由度的运动呈现出更明显的非线性特征[1],准确预报船舶横摇运动的关键在于求解船舶的非线性横摇阻尼。

GD 06-2005中 国 船 级 社CHINA CLASSIFICATION SOCIETY小水线面双体船指南Guidelines of SmallWaterplane Area Twin Hull Craft2005目录第1章通则第1节 一般规定第2节 检验第2章结构设计原则第1节 一般规定第3章设计载荷…第1节 一般规定第2节 总体载荷第3节 高速小水线面双体船局部载荷第4节 非高速小水线面双体船局部载荷第4章构件尺寸第1节 一般规定第2节 高速小水线面双体船构件尺寸第3节 非高速小水线面双体船构件尺寸第5章结构直接计算第1节 一般规定第2节 结构模型第3节 屈服强度校核第4节 屈曲强度校核第6章结构疲劳评估第1节 一般规定第7章轮机第1节 一般规定第 1 章 通 则第 1 节 一般规定1.1.1适用范围1.1.1.1 本指南适用于以下民用的小水线面双体船:(1)高速小水线面双体船——最大航速满足V≥3.7▽0.1667m/s;(2)非高速小水线面双体船——最大航速限定为V<30kn,且在设计中不考虑船体产生的水动升力及其特性。
式中:V——船舶处于最大营运重量状态,以核定的最大持续推进功率,在静水中航行能达到的速度;▽——设计水线对应的排水体积,m3;1.1.1.2 对高速小水线面双体船,应按本指南中对高速小水线面双体船的有关规定。
1.1.1.3 对非高速小水线面双体船,应按本指南对非高速小水线面双体船的有关规定。
1.1.1.4 本指南条款中未特别说明者,均适用于高速小水线面双体船和非高速小水线面双体船。
1.1.1.5小水线面双体船的消防、救生、稳性防污染等法定要求还应符合船旗国主管机关的有关规定。
1.1.2等效与免除1.1.2.1 除另有规定外,对计算方法、评定标准、制造程序、材料、检验和试验方法等,凡能提供必需的试验、理论依据或使用经验,或有效公认的标准等,经CCS同意后,可等效于或替代本指南要求的内容。
小水线面双体船的船型特点、应用现状和发展趋势任雅广【摘要】作为一种新型的高性能船型,小水线面双体船型凭借其宽敞的装载空间和优秀的航行性能,在各国获得了快速的发展和广泛的应用.本文重点介绍了小水线面双体船的船型特点和优秀的性能,以及国内外的应用现状和发展趋势.【期刊名称】《船舶设计通讯》【年(卷),期】2015(000)001【总页数】5页(P29-33)【关键词】小水线面双体船;船型特点;军民应用;发展趋势【作者】任雅广【作者单位】海军装备部驻上海地区军事代表局,上海200135【正文语种】中文【中图分类】U674.951小水线面双体船(Small Water-plane Area Twin Hull ship,SWATH ship)是一型高科技、高附加值、高性能的新型船舶。
19世纪时从欧洲开展研究,到20世纪70年代把小水线面和半潜双体船相结合,逐步发展成为现在的船型,得到了非常广泛的应用。
小水线面双体船的船型特点,顾名思义,主要在于小水线面和双体两个方面。
首先,其具备双体船甲板面宽、横稳性好的特点,使得上层甲板的空间布置更加灵活。
其次,与一般的双体船不同,小水线面双体船的排水量主要来自于它的两个潜体,水线面处只有两个细长支柱,因而称为小水线面。
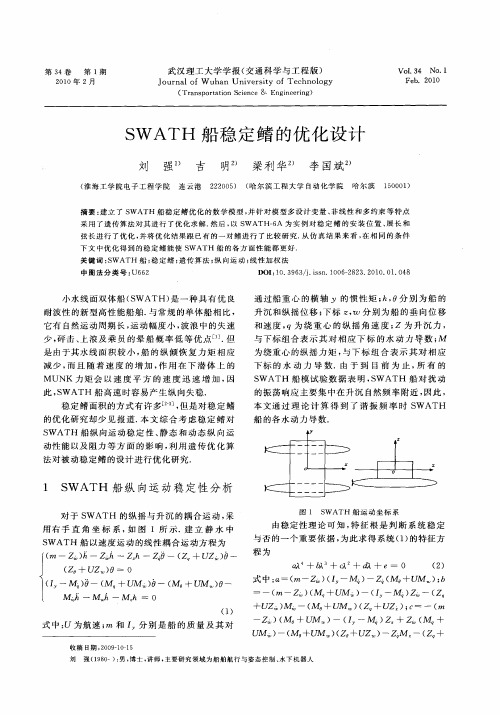
常见的船型结构见图1。
小水线面双体船结构复杂,与相当排水量的常规船型相比,重量更大、吃水更深,对码头的水深要求较高。
船体吃水对载重量非常敏感,全船的配载要求高。
小水线面双体船的船型特点汇总于表1。
在水线面处,由于支柱瘦长、长宽比大,可以有效削弱波浪能力,使得小水线面船具有优秀的兴波阻力优势。
而其支柱间距大,片体间波浪的相互干扰很小,因此可以有效减小兴波阻力。
与排水量相当的常规船型相比,小水线面双体船一般具有更大的湿表面积,因此摩擦阻力较大。
只有当船速超过一定值使得兴波阻力占总阻力的比重大于50%时[1],小水线面双体船才能显示出其在阻力方面的优势。
需要注意的是,其吃水更深,因此在有限水域中的浅水效应也更为显著。
第39卷 第2期2010年4月 船海工程SH IP &OCEA N ENG IN EERI NG V ol.39 N o.2A pr.2010收稿日期:2009-05-05修回日期:2009-05-14作者简介:林 政(1984-),男,硕士生。
研究方向:船舶水动力性能与船型研究。
E -mail:linzheng _1984@DOI:10.3963/j.issn.1671-7953.2010.02.015小水线面双体船的纵向运动稳定性研究林 政,毛筱菲(武汉理工大学交通学院,武汉430063)摘 要:为探讨小水线面双体船在中高速时容易失去纵向运动稳定性的问题,采用Ro uth 判据对其运动稳定性进行初步研究,分析对稳定鳍水动力性能影响较大的几个参数。
关键词:小水线面双体船;稳定鳍;M U NK 力矩中图分类号:U 661.2 文献标志码:A 文章编号:1671-7953(2010)02-0054-04小水线面双体船(small waterplane area twin hull ,SW ATH )与传统的单体排水船相比,具有较小的水线面积,因此所受的干扰力较小,具有较长的固有周期、不易发生共振、运动幅值较小、波浪中失速较小等;但是较小的水线面积导致纵倾恢复力减少,特别是在中高速时,作用在船舶上的/MU NK 0力矩,容易使船舶失去纵向运动稳定性。
目前保证船舶在中高速时的纵向运动稳定性的有效方法是安装稳定鳍,主要是尾鳍,可以有效地抵消/MU NK 0力矩的不利作用。
小水线面双体船的水动力性能对船体形状比单体船更为敏感,因此,改善纵向运动稳定性很重要。
1 纵向运动控制方程及稳定性判断1.1 静水中的纵向运动控制方程小水线面双体船以定常速度在静水中前进时,其在纵向平面内的运动方程具有如下形式:(M +A 33)N ##3+B 33N #3+C 33N3+A 35N ##5+B 35N #5+C 35N 5=0(1)A 53N ##3+B 53N #3+C 53N 3+(I 5+A 55)N ##5+B 55N #5+C 55N 5=0(2)式中:M )))船体质量;I 5)))船体关于通过船舶重心的横轴y 的质量惯性矩;N 3、N 5)))船的垂荡位移和纵摇角位移;A ik 、B ik 、C ik )))纵摇运动附加质量、阻尼系数和恢复力系数,i 、k =3为垂荡,i 、k =5为纵摇。
由于船在静水中,所以方程右边的波浪扰动力均为0。
水动力系数A ik ,B ik 以及恢复力系数C ik 主要由以下三部分组成:¹无稳定鳍的小水线面双体船对具有自由水表面水的扰动所引起的势流运动;º无稳定鳍的小水线面双体船对水扰动引起的粘性流动;»稳定鳍的水动力效应。
其中,势流引起的水动力系数的计算是按照切片理论的基础上建立的双体船势流水动力系数计算方法,而粘性和鳍所产生的水动力系数的计算采用的是经验公式方法[1-2]。
1.2 纵向运动稳定性判别纵向运动方程(1),(2)为具有常数系数的线性齐次微分方程组,假定其特解形式,对公式进行变换,得到纵向运动特征方程为:a K 4+b K 3+c K 2+d K +e =0(3)其系数表达式为:a =(M +A 33)(I 5+A 55)-A 35A 53b =(M +A 33)B 55+A 53B 35+ B 33(I 5+A 35)-B 35A 53c =(M +A 33)C 35-A 53C 35+B 33B 55- B 53B 35+(I 5+A 55)C 33-A 35A 53d =B 33C 55-B 53C 35+C 33B 55-C 35B 53e =C 33C 55-C 35C 53(4)(5) (6)(7)(8)方程为一元4次方程,特征方程有4个根。
方程的四个特征根以K n 表示,则K n 值可能为实数也可能为复数,当为复数值时将会成对出现:K n =K n r +i K nl(9)式中:K n l )))周期性振荡频率所得的4个根的形式决定了SWAT H 在静小水线面双体船的纵向运动稳定性研究)))林政,毛筱菲水中的纵向运动的特征以及稳定与否。
当K n是正常数时,不稳定;当K n是复数且有正实部时,船舶纵向运动作不稳定的摇摆;当K n是负实数时,船舶纵向运动是稳定的,船受到扰动时以指数衰减形式振荡,并且回到初始稳定位置;当K n为复数且有负实部时,船受到扰动时有明显的阻尼摇摆,以衰减形式回到初始稳定位置。
第三、四种形式是稳定的,但第三种情况不常见,第四种情况在实际船舶航行中最为普遍。
据Routh稳定判断,4个特征根带有负实部的充分必要条件是:a、b、c、d、e>0(10)bcd-ad2-b2e>0(11)bc-ad>0(12) 1.3评价纵向运动稳定性的3个特征参数从方程的4个特征根可得到描述船体纵向运动3个重要的特征参数。
1)固有周期。
复数特征根的虚部为周期性振荡频率,得:T1=2P/|K1l|(13)T3=2P/|K3l|(14)其中,两个数值中较大一个为纵摇固有周期,较小的为垂荡固有周期。
2)半衰周期。
指的是振动的幅值由初始值减至一半所需要的时间,得:T1/21=ln2/|K1R|(15)T1/23=ln2/|K3R|(16)其中数值较大者为垂荡半衰周期,较小者为纵摇半衰周期。
3)阻尼比。
假设4个特征值中,K1、K2对应垂荡运动,K3、K4对应纵摇运动,得:F3=-(K1+K2)/2K1K2(17)F5=-(K3+K4)/2K3K4(18)当小水线面双体船在设计航速航行,出现纵向运动不稳定的情况,用加稳定鳍来抵消/MU NK0力矩的不利作用。
通过设计合适面积的首尾稳定鳍的目的就是改变船体的水动力系数,从而达到使船体具有合适的固有周期、半衰周期和阻尼比,以提高小水线面双体船在波浪中的运动性能;同样,通过对3个纵向运动特征参数的比较,可以对各个稳定鳍方案的优劣提供一个衡准的指标。
2纵向运动稳定性程序设计针对给定的船体型值文件,采用WAVM O-SWATH程序模块[3-4]计算得到船的水动力系数。
将水动力系数作为稳定性判断的输入,如果稳定,则输出运动稳定性特征参数;如果不稳定,则考虑加稳定鳍,计算得到稳定鳍的水动力系数,将其耦合到船体的水动力系数中,重复此前的稳定性判断循环。
主要结构流程见图1。
图1程序结构流程图2.1SWATH船的纵向运动稳定性判断选取一条小水线面双体船进行研究,其船体参数见表1。
表1SWATH船的主要尺度名称尺度名称尺度排水量/t1345.8船体宽度/m20.24最大支柱厚度/m1.9纵稳心高/m 5.5船体总长/m59片体间距/m16.30支柱长度/m50.238质量纵向惯性矩I5292801051.6设计吃水/m 5.26水线面面积/m2128潜体半径/m 1.97潜体投影面积(单个)/m2199.4小水线面双体船在没有稳定鳍的情况下,航速25kn时,各水动力系数为:A33=8.48@105;A35=3.65@106;A53=4.61@106;A55=4.64@108;B33=2.52@105;B35=1.12@107;B53=-1.12@107;B55=6.30@107;C33=1.29@106;C35=1.18@107;C53=-2.06@106;C55=-6.76@107。
运动特征方程为:第2期船海工程第39卷a K4+b K3+c K2+d K+e=0式中:a=1.64@1015;b=3.18@1014;c=9.71@ 1014;d=1.01@1014;e=-8.48@1013由Routh判据可得,在特征方程中出现系数的情况,该小水线面双体船在25kn航速时纵向运动时是不稳定的。
则该小水线面双体船要保证25kn航速稳定性需要加装稳定鳍。
2.2鳍的方案设计与鳍的影响分析在基本计算模型基础上,分别改变鳍的面积、安装位置等参数,对鳍的稳定性影响进行分析。
船舶保持稳定的航速V n=25kn在静水中航行,稳定鳍选用NACA对称翼型系列,平均展弦比为选为1.2。
1)鳍的安装位置不变,改变鳍的面积。
初步假定尾鳍的安装位置为船后距离船中0.35L下体长度处,首鳍安装位置为船前距离船中0.23L下体长度处,首鳍的面积取为尾鳍的20%。
改变尾鳍对下体投影面积的比值,首鳍的面积同时随着尾鳍的面积改变,计算结果见图2。
2)鳍的面积、组合形式不变,改变鳍的纵向安装位置。
假设尾鳍的面积占下体投影面积的15%,首鳍的面积依旧为尾鳍的20%。
改变尾鳍距船中纵向距离,计算结果见图3。
3)鳍的安装位置不变,改变鳍的组合形式。
初步假定尾鳍的安装位置为舯后0.35下体长度处,首鳍安装位置为船前距舯0.23L下体长度处,尾鳍的面积占下体投影面积的8%,改变首鳍对尾鳍的面积比值。
计算结果见图4。
小水线面双体船的纵向运动稳定性研究)))林政,毛筱菲对理论计算得到的数据进行分析,稳定鳍的安装有效改善了SW ATH船的纵向运动稳定性。
但并不是尾鳍的面积越大越好,超过一定的值后,并不能使船稳定;稳定鳍的面积不变,尾鳍安装位置的移动,对船舶垂荡和纵摇运动的固有周期影响不大;首鳍不利于纵向运动的稳定,但能有效地增大阻尼,增大纵摇固有周期,半衰周期减小,加快了振荡响应的收敛,对改善船舶耐波性能有益。
在给定船型和保证航速的前提下,尾鳍的面积达到潜体投影面积的5%时可以保证船的纵向运动稳定性,但是此时船的运动性能并不好,结合船的运动性能和建造、经济等因素,建议取值15%左右;首鳍的面积取为尾鳍面积的5%~ 20%时可以获得较好的纵向运动性能。
对不同方案计算得到的运动性能进行比较,选择方案见表2。
表2鳍的参数面积/m2展长/m弦长/m展弦比安装位置距舯/m 尾鳍15.95 4.38 3.65 1.2-17.7首鳍 3.19 1.96 1.63 1.211.8加装稳定鳍后,船舶的运动特征参数如表3。
表3SWATH的运动特征参数固有周期/s半衰周期/s阻尼比垂荡8.34 2.580.15纵摇31.76 1.870.773结束语小水线面双体船性能方面的最大优点就是具有优良的耐波性,在设计早期对耐波性能进行估算和预报即致力于建立一个理论计算预报和评价的工具,很有必要。
所开发的小水线面双体船在静水中的纵向运动稳定性判断和方案选择程序,思想简捷实用,可使得设计者在设计之初,方便地得到满意的设计方案。
参考文献[1]L EE C M,CERPH EY R M.Predictio n o f mo tio n,stability&wav e load of small w ater plane a rea tw in hull ships[R].SN A M E T r ansactio ns,1977.[2]L EE C.M.T heo retical pr ediction of motion of smal-lw ater ar ea tw in-hull(SWA T H)ship in waves[R].DT NSRDC Repor t SPD-76-0046,1976.[3]毛筱菲.小水线面双体船耐波性能数值计算使用手册[R].武汉:武汉理工大学,2004.[4]毛筱菲.小水线面双体船在波浪中的运动响应预报[J].船海工程,2005(4):13-15.Research of the Stability of L ongitudinal M otion for SWAT H ShipLIN Zheng,MAO Xiao-fei(Scho ol of T r anspor tatio n,Wuhan U niv ersity of T echno lo gy,W uhan430063,China) Abstract:A iming at the pr oblem of t he SW AT H ship lo ses it s long itudinal stability in high speed easily,the Routh stabilit y crit erio n w as ado pted to do some initial r esear ch on its mot ion stabilit y.So me par amet er s affecting the hy dr ody-namic perfo rmance o f the stability fin for SW A T H ship w ere analy zed.Key words:SW A T H ship;stabilit y fin;M U NK moment。