阵列信号处理中DOA算法分类总结(大全)
- 格式:docx
- 大小:432.37 KB
- 文档页数:12

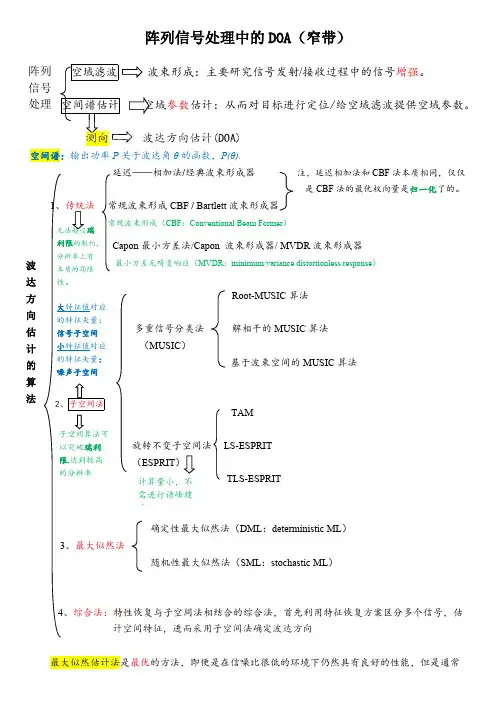
阵列信号处理中的DOA (窄带)/接收过程中的信号增强。
空域参数估计:从而对目标进行定位/给空域滤波提供空域参(DOA)θ的函数,P(θ)./经典波束形成器 注,延迟相加法和CBF 法本质相同,仅仅是CBF 法的最优权向量是归一化了的。
CBF / Bartlett 波束形成器 CBF :Conventional Beam Former ) 最小方差法/Capon 波束形成器/ MVDR 波束形成器MVDR :minimum variance distortionless response ) Root-MUSIC 算法 多重信号分类法 解相干的MUSIC 算法 (MUSIC ) 基于波束空间的MUSIC 算法 TAM 旋转不变子空间法 LS-ESPRIT TLS-ESPRIT 确定性最大似然法(DML :deterministic ML )随机性最大似然法(SML :stochastic ML )最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
阵列流形矩阵(导向矢量矩阵)只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形 A 以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
这种算法是使波束形成器的输出功率相对于某个信号为最大。
(参考自:阵列信号处理中DOA估计及DBF技术研究_赵娜)注意:上式中,导向矩阵A表示第K个天线阵元对N个不同的信号s(i)示第i个信号s(i)在M个不同的天线上的附加权值。

阵列信号处理中的DOA估计算法摘要:本文简要介绍了阵列信号处理的基本知识和其数学模型,并且对阵列信号处理中很重要的来波方向(DOA)估计方法进行了比较,主要包括古典谱估计方法、Capon最小方差法、多重信号分类(MUSIC)算法以及旋转不变因子空间(ESPRIT)算法。
通过这些算法的介绍和比较,我们可以很方便地在不同的情况下选择不同的算法去对信号的来波方向进行估计。
关键词:阵列信号处理;来波方向(DOA);MUSIC;自相关矩阵;特征分解;ESPRIT DOA Estimation Algorithms in Array Signal Processing Abstract:In this paper, we have introduced the basic knowledge and data model of array signal processing and have compared many DOA estimation methods in array signal processing,which included classical spectrum estimation method、Capon minimum variance method、MUSIC method and ESPRIT method。
Through the introduction and comparison of these algorithms,we can choose different algorithm to estimate the DOA of signal in different situation,conveniently。
Key word s:array signal processing;DOA;MUSIC;self-correction matrix;eigendecomposition;ESPRIT1.引言近几十年来,阵列信号处理作为信号处理的一个重要分支,在声纳、雷达、通信以及医学诊断等领域得到了相当广泛的应用和发展。
阵列信号处理中的DOA (窄带)/接收过程中的信号增强。
参数估计:从而对目标进行定位/给空域滤波提供空域参数。
(DOA)空间谱:输出功率P 关于波达角θ的函数,P(θ).——相加法/经典波束形成器注,延迟相加法和CBF 法本质相同,仅仅是CBF 法的最优权向量是归一化了的。
CBF / Bartlett 波束形成器CBF :Conventional Beam Former )最小方差法/Capon 波束形成器/ MVDR 波束形成器MVDR :minimum variance distortionless response )Root-MUSIC 算法多重信号分类法解相干的MUSIC 算法(MUSIC )基于波束空间的MUSIC 算法TAM旋转不变子空间法LS-ESPRIT TLS-ESPRIT 确定性最大似然法(DML :deterministic ML )随机性最大似然法(SML :stochastic ML )最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
阵列流形矩阵(导向矢量矩阵)只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个特定阵列天线的阵列流形矩阵A。
传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形 A 以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
这种算法是使波束形成器的输出功率相对于某个信号为最大。
(参考自:阵列信号处理中DOA估计及DBF技术研究_赵娜)注意:理解信号模型注意:上式中,导向矩阵A的行向量表示第K个天线阵元对N个不同的信号s(i)的附加权值,列向量表示第i个信号s(i)在M个不同的天线上的附加权值。
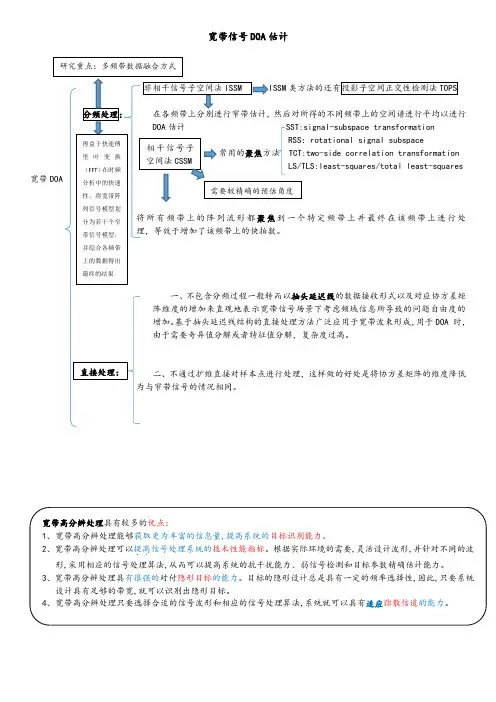
宽带信号DOA 估计rotational signal subspace 宽带特定频带上并最终在该频带上进行处的数据接收形式以及对应协方差矩用于DOA 时,非相干信号子空间法ISSM最早出现的宽带信号高分辨DOA 估计方法是非相干信号子空间方法(ISSM :incoherent signal subspace method)。
主要思想:将宽带数据分解到不重叠频带上的窄带数据,然后对每一个频带进行窄带信号子空间处理,再对各处理结果进行简单平均。
即对每一个子带的谱密度矩阵进行特征分解,根据特征子空间构成空间谱,对所有子带的空间谱进行算术平均或几何平均,最后得出宽带信号空间谱估计ISSM:为了估计各个窄带上的谱密度矩阵,需要把时域观测信号转换..到频域。
首先将观测时间T 0内采集到的信号数据平均分成K 个不重叠的段,每段的长度为T K =T 0/K,再对每段信号作快速傅立叶变换(FFT),得到K 组互不相关的窄带频率分量,宽带处理中称K 为频域快拍,由此可以得到K 个快拍,记为X k (f),k=1,2,…,K,f=1,2,…,J 。
ISM 算法的思想就是由这K 个频域快拍估计多个目标的方位。
ISSM 的缺点:ISM 用平均的方法利用了宽带信号的信息,但是由于宽带信号的能量分布并不均匀,不同的窄带部分往往具有不同的信噪比,低信噪比的窄带部分可能对宽带信号的高分辨DOA 估计产生很大的偏差,因此这种简单的平均不能充分利用信号的能量。
当目标具有相干性时,每一个子带的估计结果都会失败,而且对每一个子带信号进行估计时,为了得到较好的相关矩阵,需要较长的信号观测值,因此运算量大。
为了克服这些缺点,提高估计性能,借鉴窄带信号的去相干原理,可以将ISM 算法加以修正扩展到宽带信号的相干源情况中。
修正ISSM 算法的实质是前后向空间平滑,但是实际上只有一个子阵,而且子阵和原阵是完全一样的,因此该方法不损失阵列孔径。
此外在实际应用中,也存在着系统误差和测量误差,在低信噪比和快拍数较少时,采用R(w j )进行目标方位估计,具有平均的意义,平均可以消除或者减弱误差对算法性能的影响,从而使修正ISSM 算法具有更高的估计精度,稳健性也更好。
阵列协方差矩阵与focuss 算法的doa 估计方法摘要:1.阵列协方差矩阵与DOA 估计方法概述2.阵列协方差矩阵的性质与应用3.focuss 算法的原理和实现4.DOA 估计方法的性能比较与优缺点分析5.结论与展望正文:1.阵列协方差矩阵与DOA 估计方法概述阵列协方差矩阵是一种在信号处理领域中常用的矩阵,主要用于描述阵列接收器接收到的信号之间的相关性。
DOA(Direction of Arrival)估计方法是指通过观测信号来确定信号源的方向,广泛应用于通信、雷达和声呐等领域。
阵列协方差矩阵与DOA 估计方法相结合,可以有效地提高信号源定位的准确性。
2.阵列协方差矩阵的性质与应用阵列协方差矩阵具有以下性质:(1)协方差矩阵是半正定的,即其元素都为非负实数,且行列式大于等于零;(2)协方差矩阵的特征值和特征向量可以用来表示信号源的方向;(3)协方差矩阵的逆矩阵可以用来消除信号之间的相关性,从而提高信噪比。
在实际应用中,阵列协方差矩阵可以用于信号处理、图像处理、通信系统等领域。
例如,在无线通信中,通过使用阵列天线接收信号,可以利用阵列协方差矩阵来估计信号源的方向,从而提高信号传输的质量和可靠性。
3.focuss 算法的原理和实现focuss(Fast Oriented Channel Estimation Using Sparse Signal Techniques)算法是一种基于稀疏信号处理技术的快速定向信道估计方法。
其主要思想是通过观测信号的稀疏特性,来有效地降低信道估计的复杂度。
focuss 算法的实现主要包括以下步骤:(1)对观测信号进行预处理,包括去除噪声、缩放信号等操作;(2)利用稀疏信号恢复算法(如L1 范数最小化)来恢复原始信号;(3)根据恢复的信号计算阵列协方差矩阵;(4)利用阵列协方差矩阵来估计信号源的方向。
4.DOA 估计方法的性能比较与优缺点分析相比于传统的DOA 估计方法,阵列协方差矩阵与focuss 算法相结合的方法具有以下优点:(1)具有较高的估计精度,尤其是在信号源数量较多时;(2)具有较好的鲁棒性,能够应对信号的波动和噪声的影响;(3)计算复杂度较低,能够实现实时估计。
阵列协方差矩阵与 focuss 算法的 doa 估计方法【原创版】目录1.阵列协方差矩阵与 DOA 估计方法的背景和意义2.阵列协方差矩阵的概念和性质3.FOCUS 算法的原理和应用4.阵列协方差矩阵与 FOCUS 算法的 DOA 估计方法的结合与应用5.结论和展望正文1.阵列协方差矩阵与 DOA 估计方法的背景和意义在无线通信和雷达系统中,确定信号源的方向(DOA,Direction of Arrival)是非常重要的。
确定信号源的方向可以帮助我们更好地接收和处理信号,提高系统的性能。
阵列协方差矩阵和 FOCUS 算法是两种常用的 DOA 估计方法。
2.阵列协方差矩阵的概念和性质阵列协方差矩阵是用于描述阵列中各元素之间相关性的矩阵,其元素是阵列中各元素的协方差。
阵列协方差矩阵具有以下性质:(1)协方差矩阵是半正定的,即其元素都是非负的;(2)协方差矩阵的行列式等于阵列的范数平方。
3.FOCUS 算法的原理和应用FOCUS(Fixed Optimum Criterion Using Sequential Search)算法是一种常用的 DOA 估计算法,其原理是在信号空间中进行搜索,找到使信号能量最大化的方向。
FOCUS 算法的应用广泛,包括无线通信、雷达系统、声源定位等。
4.阵列协方差矩阵与 FOCUS 算法的 DOA 估计方法的结合与应用阵列协方差矩阵和 FOCUS 算法的结合可以提高 DOA 估计的精度和效率。
具体方法是,先用阵列协方差矩阵描述阵列中各元素之间的相关性,然后利用 FOCUS 算法在信号空间中进行搜索,找到使信号能量最大化的方向,即信号源的方向。
5.结论和展望阵列协方差矩阵和 FOCUS 算法的结合是一种有效的 DOA 估计方法,可以提高估计的精度和效率。
二维DOA估计算法与对比实验二维方向或角度of arrival (DOA)估计是指在接收到来自不同方向或角度的信号时,通过信号处理技术来确定信号的入射方向或角度的过程。
二维DOA估计在许多领域中都有广泛的应用,如无线通信、雷达、声音处理等。
本文将介绍一些常用的二维DOA估计算法,并进行对比实验。
首先,最常用的二维DOA估计算法是基于阵列信号处理的方法。
阵列信号处理方法是利用阵列天线接收到的信号的时延差和相位差来估计信号的DOA。
其中最简单的方法是通过计算各个天线收到信号的相位差来估计信号的DOA。
这种方法需要设置至少两个天线,并且需要在每个天线上进行信号采样和相位测量。
然后,通过对相位差进行数学处理,可以得到信号的DOA。
这种方法的优点是简单易用,计算量小,但精度较低。
另一种常用的二维DOA估计算法是基于波束形成的方法。
波束形成是利用阵列天线的方向性来增强特定方向上的信号,从而提高DOA估计的精度。
波束形成方法通过调整每个天线的权重来实现,使得期望方向的信号增强,而其他方向的信号衰减。
然后,通过测量每个天线输出的能量来估计信号的DOA。
这种方法的优点是具有较高的精度,但计算量较大。
此外,还有一种常用的二维DOA估计算法是基于最大似然估计的方法。
最大似然估计方法是基于概率统计原理的,它通过最大化似然函数来确定信号的DOA。
这种方法需要先建立一个信号模型,然后通过对似然函数求导,并解方程得到DOA的估计值。
最大似然估计方法的优点是在一定条件下具有最佳的性能,但对于复杂信号模型,可能需要更多的计算资源。
针对上述三种方法,可以进行对比实验来评估它们的性能。
实验可以设置一个模拟阵列接收信号的场景,并在不同的DOA下生成信号。
然后,利用以上三种方法进行DOA估计,并与真实DOA进行对比。
评估指标可以包括均方根误差(RMSE)、估计准确率等。
实验结果可以表明不同方法在不同DOA情况下的性能差异。
除了上述方法,还有一些其他的二维DOA估计算法,如基于子空间分解的方法、基于机器学习的方法等。
阵列信号处理摘要:阵列信号处理是信号处理领域内的重要分支,在近年来得到了迅速发展。
智能天线技术的核心是自适应天线波束赋形技术,提高系统容量,降低发射功率并提高接收灵敏度。
同时,波达方向估计是阵列信号处理的一个主要研究领域,在雷达、通信、声纳、地震学等领域都有着广泛的应用前景。
通过研究经典的多重信号分类(MUSIC)算法,对波达方向(DOA)的估计。
关键词:智能天线技术;波达方向;MUSIC算法;波达方向(DOA)估计。
引言:阵列信号处理主要的研究方向是自适应阵列处理和空间谱估计。
空间谱估计主要目的是估计信号的空域参数或信源位置,如果能得到信号的空间谱,就能得到信号的波达方向(DOA)。
波达方向估计指的是要确定同时处在空间某一区域内多个感兴趣信号的空间位置,即各个信号到达阵列参考阵元的方向角。
1.空间谱估计原理空间谱估计就是利用空间阵列实现空间信号的参数估计。
空间谱估计系统应该由三部分组成:空间信号入射、空间阵列接收及参数估计。
在研究过程中,需要确定假设条件。
有以下几条:点源假设、窄带信号假设、阵列与模拟信道假设、噪声假设等构成估计系统。
2.阵列信号DOA估计的常用方法(1)传统波束形成法,主要思想是:在某一时刻使整个阵列对某一个方向进行估计,测量输出功率。
在输出功率上,能产生最大功率的方向就是DOA估计。
(2)Capon最小方差法,主要思想是:通过最小化总体输出的功率,来降低干扰的影响,从而对来波方向进行估计。
(3)子空间类算法,主要思想是:利用阵列接收数据的协方差矩阵R的两条性质:特征向量的扩张空间可分解成两个正交子空间,即信号子空间和噪声子空间;信号源的方向向量与噪声子空间正交。
3.影响DOA估计结果的因素信号的DOA估计结果受到多种因素的影响,既与入射信号源有关,也与实际应用中的环境有关。
以下给出比较重要的影响因素。
(1)阵元数。
一般来说,在阵列其它参数一样的情况下,阵元数越多,超分辨算法的估计性能越好;(2)阵元间距。
阵列快速DOA估计算法本文主要研究思路:本文主要研究成果:结论:进行快速 DOA 算法的研究时:思路1、就是采用低维搜索或者直接采用待估角闭式解的方法来代替复杂的高维搜索;思路2、就是采用避免计算协方差矩阵及对其特征分解的方法快速估计出子空间或者直接采用计DOA 估计。
(一)、一维快速DOA1、一维快速空间谱测向历史及发展现状对高维协方差矩阵进行降维的处理办法。
其代表算法是波束域 MUSIC 算法。
波束域类算法通过压缩阵列空间输出来减少接收数据维数,有着较稳健..的参数估计性能以及较低.的信噪比门限等优点。
然而波束域类算法仍需要进行高运算复杂度的特征值分解,并不能从根本上解决运算量大问题。
于是,为进一步降低测向算法的运算量,(1)、子空间类算法划分为三类:第一类:矩阵分割类快速算法。
这类算法利用了接收信号矩阵或采样协方差矩阵自身特点,通过简单的矩阵分割变换来快速得到信号子空间或者噪声子空间,这类算法较简单,但其性能却第二类:多级维纳滤波(MSWF)类快速算法第三类:传播因子类(PM)快速算法。
这类算法运算量小,分辨率高,在二维快速算法中也应用较多。
(2)、非子空间类的(不需要估计子空间)快速DOA 估计方法。
(1)通过解低阶方程直接..求取波达方向的方法(CEM法)的根来估计信号的 DOA,但这个信源数阶的方程的构建过程仍然具有较大的计算负担。
(2)基于伪协方差阵方法。
该方法传统的子空间算法相比,可以减少M2N 个运算量,尤其是当快拍数 N 很大时,该算法可以有效降低算法的运算复杂度。
但是,该算法需要结合角度响应谱和方向谱得出最终角度估谱峰搜索,算法的复杂度在此部分被极大提升,而且该算法的鲁棒性、角度估计性能也不太好。
2、常规子空间测向算法:噪声子空间U N。
MUSIC算法:求根MUSIC算法:ESPRIT算法:3、非子空间类的快速测向算法基于伪协方差矩阵的快速 DOA 估计算法分两个步骤实现:一、是利用输出功率粗略..地估.计.入射信号的方位范围,称为方位响应(Bearing Response);二、是通过归一化空间谱即方位谱(Directional Spectrum)搜索来确定信号的精确入射方向。
MIMO阵列中基于PM和降维变换的高效DOA估计算法张小飞;张立岑;陈未央;徐大专【摘要】研究了多输入多输出(Multiple-input multiple-output,MIMO)阵列中高效的到达角(Direction-of-arrival,DOA)估计方法.传播算子(Propagator method,PM)算法是一种低复杂度的算法,因为它不需要对互相关矩阵进行特征值分解,也无需要对接收数据进行奇异值分解.因此本文提出了MIMO阵列中一种基于PM和降维变换的DOA估计方法.该算法在无需谱峰搜索的情况下获得了较好的估计性能.相比于传统的PM算法,本文提出的算法复杂度更低,并且估计性能更好.此外,本文推导了该算法的估计误差以及克拉美罗界,仿真结果验证了该算法的有效性.【期刊名称】《数据采集与处理》【年(卷),期】2014(029)003【总页数】6页(P372-377)【关键词】DOA估计;阵列信号处理;传播算子算法【作者】张小飞;张立岑;陈未央;徐大专【作者单位】南京航空航天大学电子信息工程学院,南京,210016;南京航空航天大学电子信息工程学院,南京,210016;南京航空航天大学电子信息工程学院,南京,210016;南京航空航天大学电子信息工程学院,南京,210016【正文语种】中文【中图分类】TN911.7引言多输入多输出(Multiple-input multiple-output,MIMO)阵列利用多根天线同时发射信号来探测目标,并同时用多根天线接收相应的目标反射信号[1-5],已被广泛应用于雷达和通信系统。
相比单根天线的传输系统,MIMO阵列系统拥有更多自由度,这些额外的自由度能使之克服衰落效应,增强参数的可识别性并提高目标探测性能[5-9]。
目前,已经有很多关于MIMO阵列的角度估计算法[10-21]。
包括最大似然方法[10],Capon算法[11-13],多重信号分类(Multiple signal classification,MUSIC)算法[14-16],求根 MUSIC 算法[17],借助旋转不变性估计信号参数(Estimation of signal parameters via rotational invariance techniques,ES-PRIT)算法[18-19],平行因子(Parallel factor,PARAFAC)方法[20]以及自适应PARAFAC算法等[21-22]。
阵列信号处理中的DOA(窄带)/接收过程中的信号增强。
参数估计:从而对目标进行定位/给空域滤波提供空域参数。
θ的函数,P(θ)./经典波束形成器注,延迟相加法和CBF法本质相同,仅仅是CBF法的最优权向量是归一化了的。
CBF/Bartlett波束形成器CBF:Conventional Beam Former)最小方差法/Capon波束形成器/MVDR波束形成器MVDR:minimum variance distortionless response)Root-MUSIC算法多重信号分类法解相干的MUSIC算法(MUSIC)基于波束空间的MUSIC算法TAM旋转不变子空间法LS-ESPRIT(ESPRIT)TLS-ESPRIT确定性最大似然法(DML:deterministic ML)随机性最大似然法(SML:stochastic ML)最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
计算量小,不需进行谱峰搜索阵列流形矩阵(导向矢量矩阵)只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形A以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
这种算法是使波束形成器的输出功率相对于某个信号为最大。
(参考自:阵列信号处理中DOA估计及DBF技术研究_赵娜)注意:上式中,导向矩阵A表示第K个天线阵元对N个不同的信号示第i个信号s(i)在M个不同的天线上的附加权值。
将式(2.6)的阵元接收信号,写成矢量形式为:X(t)=AS(t)+N(t)其中,X(t)为阵列的M×1维快拍数据矢量,N(t)为阵列的M×1维噪声数据矢量,S(t)为信号空间的N×1维矢量,A为空间阵列的M×N维阵列流型矩阵(导向矢量矩阵),且]其中,导向矢量为列矢量,表示第i个信号在M个天线上的附加权值式中,,其中,c为光速,λ为入射信号的波长。
DOA——MUSIC算法⼀、均匀圆阵(UCA, Uniform Circular Array)的MUSIC算法假设⼀个半径为R的M元均匀圆阵的所有阵元均位于坐标系X-Y平⾯内,第k-1个阵元坐标为,第i个窄带信号波长为,来波⽅向为,如图1,则第k-1个阵元到圆⼼(即原点)的波程差为:均匀圆阵存在P个⼊射信号均匀圆阵的接收模型可表⽰为:其他步骤与基于ULA的MUSIC算法⼀致。
令任意两阵元间的波程差为:当时,即产⽣相位模糊。
将均匀圆阵各阵元投影到⼊射⽅向,得到⼀个随⼊射⽅向变动的⾮均匀线阵。
需要保证在任意⼊射⽅向上投影出的⾮均匀线阵,其最⼩间隔总是⼩于信号波长,模糊谱峰对测向结果影响较⼩,即:在⽅向⾓相同时,⽔平⼊射()信号的波程差最长,且投影出的⾮均匀线阵随⽅向⾓不同周期变化,因此只需要讨论⽔平⼊射信号对应投影线阵的不同情况。
在MUSIC算法中,阵元的最⼩间隔越⼤模糊谱峰峰值就越⼤。
但在均匀圆阵中,阵元间隔随着⼊射波⽅向变化,因此算法性能受到最⼩间隔最⼤值的影响。
根据来波⽅向不同,⼊射⽅向上的第k个阵元投影间隔分别为:当M为奇数时,对着阵元⼊射,投影点重合为(M+1)/2个;当M为偶数时,对着相邻阵元连线中点⼊射,投影点重合为M/2个,此时投影线阵的⾮零最⼩间隔的值最⼤,且取得该最⼤值k=1时。
进⼀步可求得半径的选取关系:选取半径时,按上式等⽐例缩放,即能使对应的奇数阵与偶数阵有近似的抗相位模糊的性能。
每⼀路接收的结构图:⼆、MUSIC1、clear all;%产⽣三信源,⾓度分别为-40°、30°、45°,采⽤8PSK调制,滚降系数为0.5的平⽅根升余弦滤波Nsym=500;%符号个数Fsym=1;%符号速率M=3;%⼀个符号对应的⽐特数Fbit=M*Fsym;%⽐特速率Nsour=3;%信源数Angle=[5,15,35];%信源的来波⽅向Fc=10;%载波频率Fs=100;%抽样频率R=0.5;%滚降因⼦Del=5;%群延迟因⼦% Nsamp=50;%采样点数或者快拍数S1=randint(Nsym,1,2^M);S2=randint(Nsym,1,2^M);S3=randint(Nsym,1,2^M);PM1=pmmod(S1,Fc,Fs,pi/8,pi/4);PM2=pmmod(S2,Fc,Fs,pi/8,pi/4);PM3=pmmod(S3,Fc,Fs,pi/8,pi/4);Rcos11=rcosflt(PM1,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos21=rcosflt(PM2,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos31=rcosflt(PM3,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos1=0.99*Rcos11+Rcos21+1.02*Rcos31;%构造相⼲信源--信源1、信源2与信源3Rcos2=Rcos11+Rcos21+Rcos31;%构造相⼲信源--信源1、信源2与信源3Rcos3=Rcos11+1.03*Rcos21+1.05*Rcos31;%构造相⼲信源--信源1、信源2与信源3save xyc3 Rcos1 Rcos2 Rcos3%产⽣三信源,⾓度分别为-40°、30°、45°,采⽤8PSK调制,滚降系数为0.5的平⽅根升余弦滤波Nsamp=1024;%采样点数或者快拍数i=sqrt(-1);j=i;Ntx=8;%阵列数SNR=[2,2,2];%三信源的信噪⽐% sn=10; %----单信号源Lamda=2;%信号波长D=Lamda/2;%线性阵列的距离p=3;%⼦阵个数L=Ntx-p+1;%⼦阵阵元数nr=randn(Ntx,Nsamp);ni=randn(Ntx,Nsamp);n=nr+j*ni;%产⽣背景噪声load xyc3;t=1:Nsamp;% s1=[Rcos1(t).'];%接收信号的采样点数%----单信号源s1=[Rcos1(t).';Rcos2(t).';Rcos3(t).'];%矩阵维数=信源数*抽样点数ps=diag((s1*s1')/Nsamp);%⽆噪声信号功率--%矩阵维数=信源数*1delta1=(1./(2*10.^(SNR/10)))*ps;%矩阵维数=1*1% delta1=ps./(2*10.^(sn/10)); %----单信号源delta2=diag(delta1);%矩阵维数=1*1delta=sqrt(delta2);%噪声幅度值--%矩阵维数=1*1Rev_s1=(1./delta')*s1;%SNR条件下的信号幅度--%矩阵维数=信源数*抽样点数%计算各信源SNR⽐条件下,阵列接收到的信号幅度%Pn=zeros(Nsamp,1);pn=zeros(Ntx,Nsamp);Pn=diag(n'*n);for h=1:Nsamppn(:,h)=n(:,h)./sqrt(Pn(h,:));endRev_n=pn;%计算各阵列接收到的背景噪声下的信号幅度%tmp=-j*2*pi*D*sin(Angle*pi/180)/Lamda;%---%矩阵维数=1*信源数% tmp=-j*2*pi*D*sin(1*pi/180)/Lamda; %----单信号源tmp1=[0:Ntx-1]';%矩阵维数=阵元数*1tmp4=[0:L-1]';%⼦矩阵维数=⼦矩阵阵元数*1a1=tmp1*tmp;%矩阵维数=阵元数*信源数A=exp(a1);%⽅向矩阵--%矩阵维数=阵元数*信源数X=A*Rev_s1+Rev_n;%阵列接收到的信号幅度--%矩阵维数=阵元数*抽样点数Rxx=(X*X')/Nsamp;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间平滑算法%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%sub_FRxx=zeros(L,L);sub_BRxx=zeros(L,L);for i=1:psub_FR=zeros(L,Nsamp);sub_BR=zeros(L,Nsamp);sub_FR=X(i:1:i+L-1,:);last=Ntx+1-i;first=last-L+1;sub_BR=conj(X(last:-1:first,:));sub_FRxx=sub_FRxx+((sub_FR*sub_FR')./Nsamp);sub_BRxx=sub_BRxx+((sub_BR*sub_BR')./Nsamp);endsub_FRxx=sub_FRxx./p;sub_BRxx=sub_BRxx./p;sub_Rxx=(sub_FRxx+sub_BRxx)./2;[VFB,HFB]=eig(sub_Rxx);[HFB,IFB]=sort(diag(HFB),1);VFB=VFB(:,IFB);VnFB=VFB(:,1:L-Nsour);VsFB=VFB(:,L-Nsour+1:L);%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间平滑算法%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% ScanAng=[-90:1:90];for i=1:length(ScanAng)tmp2=-j*2*pi*D*sin(ScanAng(i)*pi/180)/Lamda;tmp3=tmp2*tmp1;tmp5=tmp2*tmp4;A_Sita=exp(tmp3);Sub_Sita=exp(tmp5);Sub_FBsita(i)=(Sub_Sita'*Sub_Sita)/(Sub_Sita'*VnFB*VnFB'*Sub_Sita);endfigure(1);semilogy(ScanAng,real(Sub_FBsita),'bo-');axis([-60 60 0.1 1e7]);xlabel('M_Angle(deg)');ylabel('M_Spectrum');grid on2、clear all;%产⽣三信源,⾓度分别为-40°、30°、45°,采⽤8PSK调制,滚降系数为0.5的平⽅根升余弦滤波Nsym=500;%符号个数Fsym=1;%符号速率M=3;%⼀个符号对应的⽐特数Fbit=M*Fsym;%⽐特速率Nsour=3;%信源数Angle=[10,40,80];%信源的来波⽅向Fc=10;%载波频率Fs=100;%抽样频率R=0.5;%滚降因⼦Del=5;%群延迟因⼦% Nsamp=50;%采样点数或者快拍数S1=randint(Nsym,1,2^M);S2=randint(Nsym,1,2^M);S3=randint(Nsym,1,2^M);PM1=pmmod(S1,Fc,Fs,pi/8,pi/4);PM2=pmmod(S2,Fc,Fs,pi/8,pi/4);PM3=pmmod(S3,Fc,Fs,pi/8,pi/4);Rcos11=rcosflt(PM1,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos21=rcosflt(PM2,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos31=rcosflt(PM3,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos1=Rcos11;%构造相⼲信源--信源1、信源2与信源3Rcos2=Rcos21;%构造相⼲信源--信源1、信源2与信源3Rcos3=Rcos31;%构造相⼲信源--信源1、信源2与信源3save xyc3 Rcos1 Rcos2 Rcos3%产⽣三信源,⾓度分别为-40°、30°、45°,采⽤8PSK调制,滚降系数为0.5的平⽅根升余弦滤波Nsamp=1024;%采样点数或者快拍数i=sqrt(-1);j=i;Ntx=8;%阵列数SNR=[10,10,10];%三信源的信噪⽐% sn=10; %----单信号源Lamda=2;%信号波长D=Lamda/2;%线性阵列的距离p=3;%⼦阵个数L=Ntx-p+1;%⼦阵阵元数nr=randn(Ntx,Nsamp);ni=randn(Ntx,Nsamp);n=nr+j*ni;%产⽣背景噪声load xyc3;t=1:Nsamp;% s1=[Rcos1(t).'];%接收信号的采样点数%----单信号源s1=[Rcos1(t).';Rcos2(t).';Rcos3(t).'];%矩阵维数=信源数*抽样点数ps=diag((s1*s1')/Nsamp);%⽆噪声信号功率--%矩阵维数=信源数*1delta1=(1./(2*10.^(SNR/10)))*ps;%矩阵维数=1*1% delta1=ps./(2*10.^(sn/10)); %----单信号源delta2=diag(delta1);%矩阵维数=1*1delta=sqrt(delta2);%噪声幅度值--%矩阵维数=1*1Rev_s1=(1./delta')*s1;%SNR条件下的信号幅度--%矩阵维数=信源数*抽样点数%计算各信源SNR⽐条件下,阵列接收到的信号幅度%Pn=zeros(Nsamp,1);pn=zeros(Ntx,Nsamp);Pn=diag(n'*n);for h=1:Nsamppn(:,h)=n(:,h)./sqrt(Pn(h,:));endRev_n=pn;%计算各阵列接收到的背景噪声下的信号幅度%tmp=-j*2*pi*D*sin(Angle*pi/180)/Lamda;%---%矩阵维数=1*信源数% tmp=-j*2*pi*D*sin(1*pi/180)/Lamda; %----单信号源tmp1=[0:Ntx-1]';%矩阵维数=阵元数*1tmp4=[0:L-1]';%⼦矩阵维数=⼦矩阵阵元数*1a1=tmp1*tmp;%矩阵维数=阵元数*信源数A=exp(a1);%⽅向矩阵--%矩阵维数=阵元数*信源数X=A*Rev_s1+Rev_n;%阵列接收到的信号幅度--%矩阵维数=阵元数*抽样点数Rxx=(X*X')/Nsamp;[V,H]=eig(Rxx);%MUSIC算法---MUltiSIgnal Classification[H,I]=sort(diag(H),1);%特征值按照升序排列V=V(:,I);%特征值对应的特征向量也按照相应特征值的升序排列Vn=V(:,1:Ntx-Nsour);%噪声⼦空间---协⽅差的特征向量--最⼩特征值对应的特征向量Vs=V(:,Ntx-Nsour+1:Ntx);%信号⼦空间---协⽅差的特征向量--最⼤特征值对应的特征向量ScanAng=[-90:1:90];for i=1:length(ScanAng)tmp2=-j*2*pi*D*sin(ScanAng(i)*pi/180)/Lamda;tmp3=tmp2*tmp1;tmp5=tmp2*tmp4;A_Sita=exp(tmp3);MUSIC_Sita(i)=(A_Sita'*A_Sita)/(A_Sita'*Vn*Vn'*A_Sita);endfigure(1);semilogy(ScanAng,real(MUSIC_Sita),'g*-');axis([-90 90 0.1 1e7]);xlabel('M_Angle(deg)');ylabel('M_Spectrum');grid on3、clear all;%产⽣三信源,⾓度分别为-40°、30°、45°,采⽤8PSK调制,滚降系数为0.5的平⽅根升余弦滤波Nsym=500;%符号个数Fsym=1;%符号速率M=3;%⼀个符号对应的⽐特数Fbit=M*Fsym;%⽐特速率Nsour=3;%信源数Angle=[5,8,35];%信源的来波⽅向Fc=10;%载波频率Fs=100;%抽样频率R=0.5;%滚降因⼦Del=5;%群延迟因⼦% Nsamp=50;%采样点数或者快拍数S1=randint(Nsym,1,2^M);S2=randint(Nsym,1,2^M);S3=randint(Nsym,1,2^M);PM1=pmmod(S1,Fc,Fs,pi/8,pi/4);PM2=pmmod(S2,Fc,Fs,pi/8,pi/4);PM3=pmmod(S3,Fc,Fs,pi/8,pi/4);Rcos11=rcosflt(PM1,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos21=rcosflt(PM2,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos31=rcosflt(PM3,Fsym,Fs,'fir/sqrt/Fs',R,Del);Rcos1=0.99*Rcos11+Rcos21+1.02*Rcos31;%构造相⼲信源--信源1、信源2与信源3Rcos2=Rcos11+Rcos21+Rcos31;%构造相⼲信源--信源1、信源2与信源3Rcos3=Rcos11+1.03*Rcos21+1.05*Rcos31;%构造相⼲信源--信源1、信源2与信源3save xyc3 Rcos1 Rcos2 Rcos3%产⽣三信源,⾓度分别为-40°、30°、45°,采⽤8PSK调制,滚降系数为0.5的平⽅根升余弦滤波Nsamp=512;%采样点数或者快拍数i=sqrt(-1);j=i;Ntx=8;%阵列数SNR=[2,2,2];%三信源的信噪⽐% sn=10; %----单信号源Lamda=2;%信号波长D=Lamda/2;%线性阵列的距离p=3;%⼦阵个数L=Ntx-p+1;%⼦阵阵元数nr=randn(Ntx,Nsamp);ni=randn(Ntx,Nsamp);n=nr+j*ni;%产⽣背景噪声load xyc3;t=1:Nsamp;% s1=[Rcos1(t).'];%接收信号的采样点数%----单信号源s1=[Rcos1(t).';Rcos2(t).';Rcos3(t).'];%矩阵维数=信源数*抽样点数ps=diag((s1*s1')/Nsamp);%⽆噪声信号功率--%矩阵维数=信源数*1delta1=(1./(2*10.^(SNR/10)))*ps;%矩阵维数=1*1% delta1=ps./(2*10.^(sn/10)); %----单信号源delta2=diag(delta1);%矩阵维数=1*1delta=sqrt(delta2);%噪声幅度值--%矩阵维数=1*1Rev_s1=(1./delta')*s1;%SNR条件下的信号幅度--%矩阵维数=信源数*抽样点数%计算各信源SNR⽐条件下,阵列接收到的信号幅度%Pn=zeros(Nsamp,1);pn=zeros(Ntx,Nsamp);Pn=diag(n'*n);for h=1:Nsamppn(:,h)=n(:,h)./sqrt(Pn(h,:));endRev_n=pn;%计算各阵列接收到的背景噪声下的信号幅度%tmp=-j*2*pi*D*sin(Angle*pi/180)/Lamda;%---%矩阵维数=1*信源数% tmp=-j*2*pi*D*sin(1*pi/180)/Lamda; %----单信号源tmp1=[0:Ntx-1]';%矩阵维数=阵元数*1tmp4=[0:L-1]';%⼦矩阵维数=⼦矩阵阵元数*1a1=tmp1*tmp;%矩阵维数=阵元数*信源数A=exp(a1);%⽅向矩阵--%矩阵维数=阵元数*信源数X=A*Rev_s1+Rev_n;%阵列接收到的信号幅度--%矩阵维数=阵元数*抽样点数Rxx=(X*X')/Nsamp;Rxx_fb=zeros(L,L);Rxx_f=zeros(L,L);Rxx_b=zeros(L,L);J=fliplr(eye(L));for m=1:pfor k=1:pRxx_f=Rxx_f+Rxx(m:1:m+L-1,k:1:k+L-1)*Rxx(k:1:k+L-1,m:1:m+L-1);Rxx_b=Rxx_b+J*conj(Rxx(m:1:m+L-1,k:1:k+L-1))*conj(Rxx(k:1:k+L-1,m:1:m+L-1))*J;endendRxx_f=Rxx_f./p;Rxx_b=Rxx_b./p;Rxx_fb=(Rxx_f+Rxx_b)./p;[V_fb,H_fb]=eig(Rxx_fb);%特征分解---MUltiSIgnal Classification[H_fb,I_fb]=sort(diag(H_fb),1);%特征值按照升序排列V_fb=V_fb(:,I_fb);%特征值对应的特征向量也按照相应特征值的升序排列Vn_fb=V_fb(:,1:L-Nsour);Vs_fb=V_fb(:,L-Nsour+1:L);ScanAng=[-90:1:90];for i=1:length(ScanAng)tmp2=-j*2*pi*D*sin(ScanAng(i)*pi/180)/Lamda;tmp3=tmp2*tmp1;tmp5=tmp2*tmp4;A_Sita=exp(tmp3);Sub_Sita=exp(tmp5);fb_sita(i)=(Sub_Sita'*Sub_Sita)/(Sub_Sita'*Vn_fb*Vn_fb'*Sub_Sita);endfigure(1);semilogy(ScanAng,real(fb_sita),'r-');axis([-60 60 0.1 1e7]);xlabel('M_Angle(deg)');ylabel('M_Spectrum');grid on4、%========================================================================= % UCA_multi_in_2D%%========================================================================= clc;clear all;close all;%------------------------常数表-------------------------------c = 3e8;namda = c/18e9;est_num = 1;iteration = 100;sr_array = [-50,-47.5,-45,-42.5,-40,-35,-27.5];phi = 60;%% ----------------⼊射信号模型-------------------------------N_x = 2^5; %快拍点数F0 = 18e9; %中⼼频率B = 20e6; %带宽Fs = 2*B; %采样频率Ts = 1/Fs; %采样时间T = (N_x-1)*Ts; %快拍持续时间u = B/T; %频率变化率t = -T/2:Ts:T/2; %时间轴点l = c/18e9;st = exp(1j*2*pi*(F0*t+.5*u*t.^2));dir7 =(46:.25:56)*pi/180; %(-50:.25:-40)*pi/180;dir8 =(62.5:.25:72.5)*pi/180;dir9 =(35:.25:45)*pi/180;%(-51:.25:-41)*pi/180;dir10=(49:.25:59)*pi/180;ang=(50:.25:70)*pi/180;e_dir7 = zeros(1,length(sr_array));e_dir8 = zeros(1,length(sr_array));e_dir9 = zeros(1,length(sr_array));e_dir10= zeros(1,length(sr_array));for ss = 1:length(sr_array)snr = sr_array(ss);%--------------------7阵元---------------------------------------sensor_num = 7;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;R = namda/(1-cos(d_angle(2)));x = R*cos(d_angle);y = R*sin(d_angle);theta = d_angle(2)*180/pi;for it = 1:iterationn = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10)); tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir7),length(ang));for i=1:length(dir7)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir7(i))+y*sin(dir7(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir7(a)*180/pi;e_dir7(ss) = e_dir7(ss)+(aa-theta)^2;end%--------------------8阵元-------------------------------------sensor_num = 8;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;R = namda/(2*sin(d_angle(2))*sin(0.5*d_angle(2)));x = R*cos(d_angle);y = R*sin(d_angle);theta = 1.5*d_angle(2)*180/pi;for it = 1:iterationtao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir8),length(ang));for i=1:length(dir8)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir8(i))+y*sin(dir8(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir8(a)*180/pi;e_dir8(ss) = e_dir8(ss)+(aa-theta)^2;end%---------------9阵元---------------------------------------------------sensor_num = 9;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;R = namda/(1-cos(d_angle(2)));x = R*cos(d_angle);y = R*sin(d_angle);theta = d_angle(2)*180/pi;for it = 1:iterationn = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir9),length(ang));for i=1:length(dir9)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir9(i))+y*sin(dir9(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir9(a)*180/pi;e_dir9(ss) = e_dir9(ss)+(aa-theta)^2;end%---------------10阵元---------------------------------------------------sensor_num = 10;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;R = namda/(2*sin(d_angle(2))*sin(0.5*d_angle(2)));x = R*cos(d_angle);y = R*sin(d_angle);theta = 1.5*d_angle(2)*180/pi;for it = 1:iterationtao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir10),length(ang));for i=1:length(dir10)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir10(i))+y*sin(dir10(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir10(a)*180/pi;e_dir10(ss) = e_dir10(ss)+(aa-theta)^2;endendfigure;% subplot(121);% plot(sr_array+45,e_dir10(1,:)/iteration,'-^k',sr_array+45,e_dir9(1,:)/iteration,'-*k');% legend('8元UCA','9元UCA');% grid on;%axis([-10,20,-.01,.45]);% colormap gray;% xlabel('信噪⽐/dB');ylabel('均⽅误差/°');% title('半径相同精度试验');%%% subplot(122);plot(sr_array+45,e_dir7/iteration,'-^k',sr_array+45,e_dir8/iteration,'-*k');hold on;plot(sr_array+45,e_dir9/iteration,'-sk',sr_array+45,e_dir10/iteration,'-dk');legend('7阵元','8阵元','9阵元','10阵元');grid on;axis([-5.5,18,-.02,.65]);colormap gray;xlabel('信噪⽐/dB');ylabel('均⽅误差/°');title('不同阵元最⼤半径测向试验');5、%========================================================================= % UCA_multi_in_2D%%========================================================================= clc;clear all;close all;%------------------------常数表-------------------------------c = 3e8;namda = c/18e9;est_num = 1;iteration = 100;sr_array = [-50,-47.5,-45,-42.5,-40,-35,-27.5];phi = 60;%% ----------------⼊射信号模型-------------------------------N_x = 2^5; %快拍点数F0 = 18e9; %中⼼频率B = 20e6; %带宽Fs = 2*B; %采样频率Ts = 1/Fs; %采样时间T = (N_x-1)*Ts; %快拍持续时间u = B/T; %频率变化率t = -T/2:Ts:T/2; %时间轴点l = c/18e9;st = exp(1j*2*pi*(F0*t+.5*u*t.^2));R = 0.01;dir9(1,:)=(-50:.25:-40)*pi/180;dir9(2,:)=(75:.25:85)*pi/180;dir10(1,:)=(-51:.25:-41)*pi/180;dir10(2,:)=(107:.25:117)*pi/180;ang=(50:.25:70)*pi/180;e_dir9= zeros(2,length(sr_array));e_ang9= zeros(2,length(sr_array));e_dir10= zeros(2,length(sr_array));e_ang10= zeros(2,length(sr_array));for ss = 1:length(sr_array)snr = sr_array(ss);%---------------7阵元---------------------------------------------------sensor_num = 9;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;x = R*cos(d_angle);y = R*sin(d_angle);theta_array = [-9*d_angle(2)/8,d_angle(3)]*180/pi;for it = 1:iterationn = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10)); for dd = 1:2theta = theta_array(dd);tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir9(dd,:)),length(ang));for i=1:length(dir9(dd,:))for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir9(dd,i))+y*sin(dir9(dd,i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir9(dd,a)*180/pi;bb = ang(b)*180/pi;e_dir9(dd,ss) = e_dir9(dd,ss)+(aa-theta)^2;e_ang9(dd,ss) = e_ang9(dd,ss)+(bb-phi)^2;endend%---------------8阵元---------------------------------------------------sensor_num = 8;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;x = R*cos(d_angle);y = R*sin(d_angle);theta_array = [-9*d_angle(2)/8,2.5*d_angle(2)]*180/pi;for it = 1:iterationfor dd = 1:2theta = theta_array(dd);tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10)); xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir10(dd,:)),length(ang));for i=1:length(dir10(dd,:))for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir10(dd,i))+y*sin(dir10(dd,i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir10(dd,a)*180/pi;bb = ang(b)*180/pi;e_dir10(dd,ss) = e_dir10(dd,ss)+(aa-theta)^2;e_ang10(dd,ss) = e_ang10(dd,ss)+(bb-phi)^2;endendendfigure;subplot(121);plot(sr_array+45,e_dir9(1,:)/iteration,'-^k',sr_array+45,e_dir9(2,:)/iteration,'-*k');legend('-9/8 360/M','3 360/M');grid on;%axis([-10,20,-.01,.45]);colormap gray;xlabel('信噪⽐/dB');ylabel('均⽅误差/°');title('9元阵⽅向⾓误差');%% subplot(222);% plot(sr_array+45,e_ang9(1,:)/iteration,'-^k',sr_array+45,e_ang9(2,:)/iteration,'-*k');% legend('-9/8 360/M','3 360/M');% grid on;axis([-10,20,-.1,1.45]);% colormap gray;% xlabel('信噪⽐/dB');ylabel('均⽅误差/°');% title('7元阵俯仰⾓误差');subplot(122);plot(sr_array+45,e_dir10(1,:)/iteration,'-^k',sr_array+45,e_dir10(2,:)/iteration,'-*k');legend('-5/4 360/M','5/2 360/M');grid on;%axis([-10,20,-.01,.45]);colormap gray;xlabel('信噪⽐/dB');ylabel('均⽅误差/°');title('8元阵⽅向⾓误差');%%% subplot(224);% plot(sr_array+45,e_ang10(1,:)/iteration,'-^k',sr_array+45,e_ang10(2,:)/iteration,'-*k');% legend('-5/4 360/M','3 360/M');% grid on;axis([-10,20,-.1,1.45]);% colormap gray;% xlabel('信噪⽐/dB');ylabel('均⽅误差/°');% title('8元阵俯仰⾓误差');6、%========================================================================= % UCA_multi_in_2D%%========================================================================= clc;clear all;close all;%------------------------常数表-------------------------------c = 3e8;namda = c/18e9;est_num = 1;iteration = 100;sr_array = [-50,-47.5,-45,-42.5,-40,-35,-27.5];phi = 60;%% ----------------⼊射信号模型-------------------------------N_x = 2^5; %快拍点数F0 = 18e9; %中⼼频率B = 20e6; %带宽Fs = 2*B; %采样频率Ts = 1/Fs; %采样时间T = (N_x-1)*Ts; %快拍持续时间u = B/T; %频率变化率t = -T/2:Ts:T/2; %时间轴点l = c/18e9;st = exp(1j*2*pi*(F0*t+.5*u*t.^2));dir7 =(46:.25:56)*pi/180; %(-50:.25:-40)*pi/180;dir8 =(62.5:.25:72.5)*pi/180;dir9 =(35:.25:45)*pi/180;%(-51:.25:-41)*pi/180;dir10=(49:.25:59)*pi/180;ang=(50:.25:70)*pi/180;e_dir7 = zeros(1,length(sr_array));e_dir8 = zeros(1,length(sr_array));e_dir9 = zeros(1,length(sr_array));e_dir10= zeros(1,length(sr_array));R = 0.1;for ss = 1:length(sr_array)snr = sr_array(ss);%--------------------7阵元---------------------------------------sensor_num = 7;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;x = R*cos(d_angle);y = R*sin(d_angle);theta = d_angle(2)*180/pi;for it = 1:iterationn = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10)); tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir7),length(ang));for i=1:length(dir7)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir7(i))+y*sin(dir7(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir7(a)*180/pi;e_dir7(ss) = e_dir7(ss)+(aa-theta)^2;end%--------------------8阵元-------------------------------------sensor_num = 8;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;x = R*cos(d_angle);y = R*sin(d_angle);theta = 1.5*d_angle(2)*180/pi;for it = 1:iterationtao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir8),length(ang));for i=1:length(dir8)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir8(i))+y*sin(dir8(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir8(a)*180/pi;e_dir8(ss) = e_dir8(ss)+(aa-theta)^2;end%---------------9阵元---------------------------------------------------sensor_num = 9;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;x = R*cos(d_angle);y = R*sin(d_angle);theta = d_angle(2)*180/pi;for it = 1:iterationn = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10)); tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir9),length(ang));for i=1:length(dir9)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir9(i))+y*sin(dir9(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir9(a)*180/pi;e_dir9(ss) = e_dir9(ss)+(aa-theta)^2;end%---------------10阵元---------------------------------------------------sensor_num = 10;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;x = R*cos(d_angle);y = R*sin(d_angle);theta = 1.5*d_angle(2)*180/pi;for it = 1:iterationtao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));A = exp(-1j*2*pi*tao./l);n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));xt = A*(sqrt(10^(snr/10))*st)+n;% -------------------2D-MUSIC算法-----------------------Rxx = xt*xt'/N_x;[U,S] = svd(Rxx);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_num));Gn = Un*Un';Pmusic = zeros(length(dir10),length(ang));for i=1:length(dir10)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir10(i))+y*sin(dir10(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);endend[a,b]=find(Pmusic==max(max(Pmusic)));aa = dir10(a)*180/pi;e_dir10(ss) = e_dir10(ss)+(aa-theta)^2;endendfigure;plot(sr_array+45,e_dir7/iteration,'-^k',sr_array+45,e_dir8/iteration,'-*k');hold on;plot(sr_array+45,e_dir9/iteration,'-sk',sr_array+45,e_dir10/iteration,'-dk');legend('7阵元','8阵元','9阵元','10阵元');grid on;axis([-5.5,18,-.02,.25]);colormap gray;xlabel('信噪⽐/dB');ylabel('均⽅误差/°');title('不同阵元相同半径测向试验');7、%========================================================================= % Circular Array Classical-Music%%========================================================================= clc;clear all;close all;c = 3e8;phi = 60;namda = c/18e9;R = 7.5/100;R = 10/100;snr = -35; %信噪⽐N_x = 2^5; %快拍点数F0 = 18e9; %中⼼频率B = 20e6; %带宽Fs = 40e6; %采样频率Ts = 1/Fs; %采样时间T = (N_x-1)*Ts; %快拍持续时间u = B/T; %频率变化率t = -T/2:Ts:T/2; %时间轴点l = c/F0;st = sqrt(10^(snr/10))*exp(1j*2*pi*(F0*t+.5*u*t.^2));%% -----------------9------------------------sensor_num = 9;R = 7.1239/100;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;theta =d_angle(2)*180/pi;x = R*cos(d_angle);y = R*sin(d_angle);tao = sin(phi*pi/180)*(x*cos(theta*pi/180)+y*sin(theta*pi/180));A = exp(-1j*2*pi*tao/l);n = randn(sensor_num,N_x)*sqrt(10^(-45/10));xt = A*st+n;% -------------------2D-MUSIC算法-----------------------Rx = xt*xt'/N_x;[U,S] = eig(Rx);est_sour = 1;[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_sour));%*diag([0.05,50,3,1,0.001,1000,777]); Gn = Un*Un';dir=(-180:.25:179.8)*pi/180;ang=(20:.25:91)*pi/180;Pmusic9 = zeros(length(dir),length(ang));for i=1:length(dir)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir(i))+y*sin(dir(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic9(i,k)=1./abs((a_theta)'*Gn*a_theta);endendP_music9 = 10*log10(Pmusic9/min(min(Pmusic9)));%% -----------------9------------------------sensor_num = 10;R = 4.5879/100;%R = 10/100;d_angle = (0:sensor_num-1)'*2*pi/sensor_num;theta =1.6*d_angle(2)*180/pi;x = R*cos(d_angle);y = R*sin(d_angle);tao = sin(phi*pi/180)*(x*cos(theta*pi/180)+y*sin(theta*pi/180));A = exp(-1j*2*pi*tao/l);n = randn(sensor_num,N_x)*sqrt(10^(-45/10));xt = A*st+n;% -------------------2D-MUSIC算法-----------------------Rx = xt*xt'/N_x;[U,S] = eig(Rx);disp(est_sour);[~,index] = sort(diag(S));Un = U(:,index(1:sensor_num-est_sour));%*diag([0.05,50,3,1,0.001,1000,777]); Gn = Un*Un';dir=(-180:.25:179.8)*pi/180;ang=(20:.25:91)*pi/180;Pmusic10 = zeros(length(dir),length(ang));for i=1:length(dir)for k=1:length(ang)a_tao = sin(ang(k))*(x*cos(dir(i))+y*sin(dir(i)));a_theta = exp(-1j*2*pi*a_tao/l);Pmusic10(i,k)=1./abs((a_theta)'*Gn*a_theta);endendP_music10 = 10*log10(Pmusic10/min(min(Pmusic10)));figure;% subplot(221);% [xx,yy] = meshgrid(ang*180/pi,dir*180/pi);% mesh(xx,yy,P_music9);% title('9元阵⼆维空间谱');% xlabel('俯仰⾓/°');ylabel('⽅向⾓/°');zlabel('空间谱/dB');% axis([20,91,-180,180,0,24]);%colormap gray;subplot(121);[xx,yy] = meshgrid(ang*180/pi,dir*180/pi);mesh(xx,yy,P_music9);title('9元阵⽅向⾓空间谱');xlabel('俯仰⾓/°');ylabel('⽅向⾓/°');zlabel('空间谱/dB');axis([20,91,-180,180,0,24]);%colormap gray;% subplot(222);% [xx,yy] = meshgrid(ang*180/pi,dir*180/pi);% mesh(xx,yy,P_music10);% title('10元阵⼆维空间谱');。
阵列信号处理中的DOA (窄带)/接收过程中的信号增强。
空域参数估计:从而对目标进行定位/给空域滤波提供空域参(DOA)θ的函数,P(θ)./经典波束形成器 注,延迟相加法和CBF 法本质相同,仅仅是CBF 法的最优权向量是归一化了的。
CBF / Bartlett 波束形成器 CBF :Conventional Beam Former ) 最小方差法/Capon 波束形成器/ MVDR 波束形成器MVDR :minimum variance distortionless response ) Root-MUSIC 算法 多重信号分类法 解相干的MUSIC 算法 (MUSIC ) 基于波束空间的MUSIC 算法 TAM 旋转不变子空间法 LS-ESPRIT TLS-ESPRIT 确定性最大似然法(DML :deterministic ML )随机性最大似然法(SML :stochastic ML )最大似然估计法是最优的方法,即便是在信噪比很低的环境下仍然具有良好的性能,但是通常计算量很大。
同子空间方法不同的是,最大似然法在原信号为相关信号的情况下也能保持良好的性能。
阵列流形矩阵(导向矢量矩阵)只要确定了阵列各阵元之间的延迟τ,就可以很容易地得出一个传统的波达方向估计方法是基于波束形成和零波导引概念的,并没有利用接收信号向量的模型(或信号和噪声的统计特性)。
知道阵列流形 A 以后,可以对阵列进行电子导引,利用电子导引可以把波束调整到任意方向上,从而寻找输出功率的峰值。
①常规波束形成(CBF)法CBF法,也称延迟—相加法/经典波束形成器法/傅里叶法/Bartlett波束形成法,是最简单的DOA 估计方法之一。
这种算法是使波束形成器的输出功率相对于某个信号为最大。
(参考自:阵列信号处理中DOA估计及DBF技术研究_赵娜)注意:上式中,导向矩阵A表示第K个天线阵元对N个不同的信号s(i)示第i个信号s(i)在M个不同的天线上的附加权值。
将式(2.6)的阵元接收信号,写成矢量形式为:X(t)=AS(t)+N(t)其中,X(t)为阵列的M×1维 快拍数据矢量,N(t)为阵列的M×1维噪声数据矢量,S(t)为信号空间的N×1维矢量,A 为空间阵列的M×N 维阵列流型矩阵(导向矢量矩阵),且A =[a 1(ω0) a 2(ω0)…a N (ω0)]其中,导向矢量a i (ω0) 为列矢量,表示第i 个信号在M 个天线上的附加权值a i (ω0)=[exp (−jω0τ1i )exp (−jω0τ2i )⋮exp (−jω0τMi )],i =1,2,…,N 式中,ω0=2πf =2πc λ ,其中,c 为光速,λ为入射信号的波长。
的时间延时为τki ,则有:τki =(k−1)d sin θi c ⁄ ,k =1,2,…,M ,其中,d 为阵元间距,一般取d=λ/2。
第i由上述的知识可知,一旦知道阵元间的延迟表达式τ,就很容易得出特定空间阵列的导向矢量或阵列流型。
,在一时间内将阵列波束“导向”到一个方向上,对期望信号得到最大输出功率的导向位置即是波达方向估计值,如图1所示。
假设空间存在M 个阵元组成的阵列,Nw =[w 1w 2…w M ]Ty (t)=w H x (t )=∑w i ∗M i=1x i (t)P (w )=1L ∑|y(t)|2=w H E {x (t )x (t )H }w =w H Rw LI=1 其中,R 为接收信号矢量x(t)的自相关矩阵图1 阵列信号处理示意图假设来自θ方向的输出功率最大,则该最大化问题可表述为:θ=arg max w[P (w )]=arg maxw[E{w H x(t)x(t)H w}]=arg maxw[w H E{x(t)x(t)H}w]=arg maxw[E|s(t)|2|w H a(θ)|2+σ2‖w‖2]为了使加权向量w的权值不影响输出信噪比,在白化噪声方差σ2一定的情况下,取‖w‖2=1,此时求解为:w CBF=a(θ)√a H(θ)a(θ)此时Bartlett 波束形成器的空间谱为:P CBF(θ)=w CBF H Rw CBF=a H(θ)Ra(θ) a H(θ)a(θ)Bartlett算法相同,仅最优权向量不同,后者的最优权是归一化了的。
)(参考自:阵列信号处理中的DOA估计技术研究_白玉)k时刻,令x(t)=u(k),s(t)=s(k),n(t)=n(k),上面公式中:P cbf(θ)=P(w),u(k)=x(t),令u(k)=a(θ)s(k)+n(k),波束形成器输出信号y(k)是传感器阵元输出的线性加权之即y(k)=w H u(k)(2-1)传统的波束形成器总的输出功率可以表示为:P cbf =E[|y(k)|2]=E[|w H u(k)|2]=w H E[u(k)u H(k)]w=w H R uu w(2-2)式中,R uu定义为阵列输入数据的自相关矩阵。
式(2-2)在传统DOA估计算法中的地位举足轻重。
自相关矩阵R uu包含了阵列响应向量和信号自身的有用信息,仔细分析R uu,可以估计出信号的参数。
考察一个以角度θ入射到阵列上的信号s(k),则有u(k)=a(θ)s(k)+n(k)。
根据窄带输入数据模型,波束形成器的输出功率可以表示成:P cbf(θ )=E[|w H u(k)|2]=E[|w H(a(θ)s(k)+n(k))|2]=|w H a(θ)|2σ2+|w H|2σn2(2-3)式中,σs2=E[s(k)2],a(θ)是关于DOA角θn(k)是阵列输入端的噪声向量。
当时,系统的输出(信号)功率达到最大。
这是因为,权值向量w在传感器阵元处和来自方向θ的信号在DOA估计的经典波束形成方法中,波束形成器产生的波束在感兴趣的区域中离散地扫描,对应不同的θ可以产生不同的权向量:w yanchi=a(θ)从而得到的输出功率也不相同。
利用式(2-3),经典波束形成器的输出功率与波达方向的关系由下式给出:P cbf(θ)=w H R uu w=a H(θ)R uu a(θ) (2-4)因此,如果我们对输入自相关矩阵进行估计,θ,通过锁定式(2-4)定义的空间谱的峰值就可以估计出波达方向。
常规波束形成器法),CBF法(Bartlett但是当存在着来自多个方向的信号时,该方法要受到波束宽度和旁瓣高度的制约,因而这种方法的分辨率较低,只能大致分辨出信号所处的角度范围。
这是因为,延迟—相加法是把阵列形成的波束指向某个方向,由此可以获得来自于这个方向的信号的最大功率。
就单个信号而言,延迟—相加法可以很好地估计出它的波达方向。
但是当信号空间中存在多个信号的时侯,因为波束宽度的限制,受到同一个波束内信号之间的相互干扰,延迟—相加法的估计性能就会急剧的下降。
增加阵列的阵元数(M)可以改善延迟—相加法的性能,提高分辨率,但是这会使系统更加复杂,还会增加算法的计算量和数据存储空间。
②Capon 最小方差法(Capon 波束形成器,也称MVDR波束形成器)最小方差无畸变响应(MVDR)波束形成器解决了延迟—相加法分辨率差的缺点,用一部分自由度在期望方向上形成一个波束,利用剩余的一部分自由度在干扰方向形成零陷。
这种方法使得输出功率和约束条件为其优化问题表述为:θ=arg minw[P(w)]约束条件为:w H a(θ)=1综合上式求解w为:w CAP=R−1a(θ) a H R−1a(θ)此时Capon 波束形成器的空间谱为:P CAP=w CAP H Rw CAP=1a H R−1a(θ)Capon算法比延迟—相加法有了一定程度的改进,可以对多个信号进行DOA 估计。
但是Capon 算法只能分辨非相干信号,当存在与感兴趣信号相关的其它信号时,它就不能起作用了。
这是因为Capon 算法在运算的过程中使用到了信号的自相关矩阵,因而不能对干扰信号形成零陷。
也就是说,在使得输出功率为最小的过程当中,相关分量可能会恶性合并。
此外,Capon算法运算时需要对信号的自相关矩阵求逆,当阵列加大时会有巨大的运算量。
对于任意的Φ,P Capon(Φ )是来自方向Φ的信号功率的最大似然估计。
子空间分解类算法开始兴起。
这一类算法有一个共同的特点,就是需要对阵列的接收数据矩阵进行数学分解(如奇异值分解、特征值分解和QR 分解等),将数据分解成两个互相正交的特征子空间:一个是信号子空间,另一个是噪声子空间。
子空间类算法按照处理方式的不同可以分成两类:一种是以 MUSIC 算法为代表的噪声子空间类算法另一种是以ESPRIT 算法为代表的信号子空间类算法。
式中,R s是信号相关矩阵( signal correlation matrix ),E[ss H]。
R的特征值为{ λ0,λ1,,λ2, ….,λM-1},使得|R−λi I|=0 (2-12)利用式(2-11),我们可以把它改写为|AR s A H+σn2I-λi I|=|AR s A H-(λi-σn2)I|=0 (2-13) 因此AR s A H的特征值(eigenvalues)νi为νi=λi-σn2(2-14)因此A是由线性独立的导引向量构成的,因此是列满秩的,信号相关矩阵R s也是非奇异的,只要入射信号不是高度相关的。
列满秩的A和非奇异的R s可以保证,在入射信号数L小于阵元数M时,M×M的矩阵AR s A H是半正定的,且秩为D。
这意味着AR s A H的特征值νi中,有M-L个为零。
由式(2-14)可知,R的特征值λi中有M-L个等于噪声方差σn2。
该M-L个最小特征值λi相关的特征向量,和构成A的L个导引向量正交。
噪声子空间和信号子空间是相互正交的,而由导向矢量所张成的空间与信号子空间是一致的。
应当指出,与传统方法不同,MUSIC算法在估计信号功率时并没有考虑波达角。
在噪声与信号源非相关的环境下,可以确保P MUSIC(θ) 的谱峰对应着信号的真实方向。
由于P MUSIC(θ)的峰值是可以分辨的,并且与信号之间的真实角度间隔没有关系,因此从理论上来讲,只要阵元位置校准的足够准确,MUSIC算法就可以分辨出两个邻近的信号。
但是当入射信号之间彼此高度相关时,自相关矩阵R xx会旋转不变子空间算法(ESPRIT)是空间谱估计算法中的典型算法之一,它和前面介绍的 MUSIC 算法一样,也需要对阵列接收数据的协方差矩阵进行特征分解。
但是两者也存在着明显的不同点,即MUSIC 算法利用了阵列接收数据的协方差矩阵的噪声子空间和导向矢量之间的正交特性,而ESPRIT 算法则利用了阵列接收数据的协方差矩阵信号子空间的旋转不变性,所以 MUSIC 算法与 ESPRIT算法可以看成为是一种互补的关系。