哈工大《机械机构创新设计及应用》大作业
- 格式:pdf
- 大小:1.09 MB
- 文档页数:18
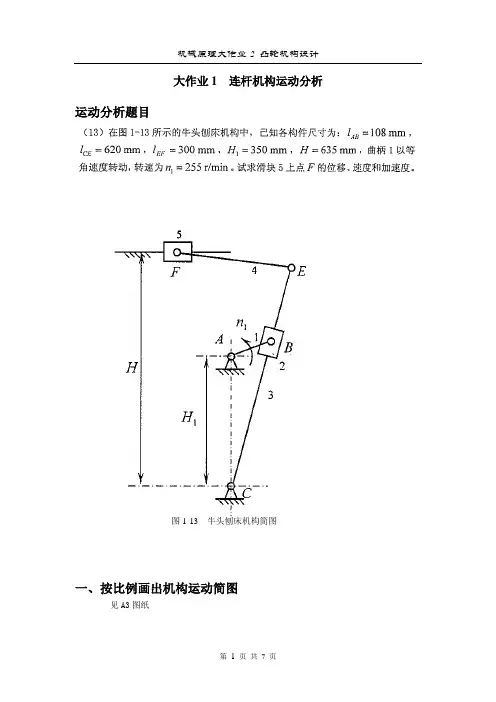
大作业1 连杆机构运动分析运动分析题目图1-13 牛头刨床机构简图一、按比例画出机构运动简图见A3图纸二、机构的结构分析及基本杆组的划分(1)机构的结构分析该机构为平面连杆机构,活动构件数n=5;有A、B、C、E、F五个转动副和B、F两个移动副,没有高副,故低副数PL=7,高副数PH=0。
机构的自由度F=3n-2PL-PH=3*5-2*7=1。
机构有确定运动轨迹。
(2)基本杆组的划分图1-13中,原动件构件1为Ⅰ级杆组,移除之后按照拆杆组法对机构进行拆分,可得由滑块2和杆3组成的RPRⅡ级杆组,以及由杆4和滑块5组成的RRPⅡ级杆组。
拆分图如下:图1-13-1 Ⅰ级杆组图1-13-2 RPRⅡ级杆组图1-13-3 RRPⅡ级杆组三、各杆组的运动分析数学模型图1-13-1 Ⅰ级杆组 x B =x A +l AB cos ϕy B =y A +l AB sin ϕ图1-13-2 RPR Ⅱ级杆组 x E =x B +(l CE -s)cos ϕj y E =y B +(l CE -s)sin ϕjϕj =arctan(B 0/A 0)A 0=xB -x CB 0=y B -y CS =2020B A + 图1-13-3 RRP Ⅱ级杆组F 的位置 x F =x E -l EF cos ϕiy F =y E +l EF sin ϕi ϕi =arcsin(A 1/l EF )A 1=H-H 1-y EF 的速度F 的加速度四、建立坐标系以A 为原点建立坐标系,则A (0,0)五、编程使用MATLAB 编写程序如下lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);a=0:0.001:0.5;xF=subs(xF,t,a);plot(a,xF)title('位移x随时间t变化图像') xlabel('t(s)'),ylabel(X')lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);vF=diff(xF,t);a=0:0.001:0.5;vF=subs(vF,t,a);plot(a,vF)title('速度v随时间t变化图像') xlabel('t(s)'),ylabel(V')lAB=108;lCD=620;lEF=300;H1=350;H=635;xC=0;yC=-350;syms t;f=(255*pi/30)*t;xB=lAB*cos(f);yB=lAB*sin(f);A0=xB-xC;B0=yB-yC;S=sqrt(A0^2+B0^2);f1=atan(B0/A0);xE=xB+(lAB-S)*cos(f1);yE=yB+(lAB-S)*sin(f1);A1=H-H1-yE;f2=asin(A1/lEF);xF=xE-lEF*cos(f2);yF=yE+lEF*sin(f2);aF=diff(xF,t,2);a=0:0.001:0.5;aF=subs(aF,t,a);plot(a,aF)title('加速度a随时间t变化图像') xlabel('t(s)'),ylabel(A')六、位移、速度、加速度图像位移xE随时间t变化图像速度vE随时间t变化图像加速度aE随时间t变化图像七、运动分析由MATLAB编程后绘制所得图线分析可知,牛头刨床的刨头F行程约为500mm,在0.06s~0.17s之间速度和加速度波动较大,在0.17s~0.29s 之间速度和加速度波动较小,这就保证了刨头在空行程时有急回运动,而在工作行程是由较均匀的切削速度,运动连续,且运动性能良好稳定。
Harbin Institute of Technology机械设计大作业说明书设计题目:轴系部件设计院系:材料科学与工程学院班级:电子封装设计者:姚明山学号:1132920112指导教师:张峰设计时间:2015.12.19目录目录 (1)任务书 (1)1选择轴的材料 (2)2初算轴径 (2)3 结构设计 (2)4轴的受力分析 (5)5校核轴的强度 (7)6校核键连接的强度 (7)7校核轴承的寿命 (8)参考文献 (9)任务书试设计齿轮减速器的输出部件。
已知输出轴功率P=2.7kW,转速n=80r/min,大齿轮齿数z2=81,齿轮模数m=3mm,齿宽B=80mm,小齿轮齿数z1=17,中心距a=150mm,半联轴器轮毂宽L=70mm,载荷平稳,工作环境多尘,三班工作制,使用3年,大批量生产。
12设计要求1. 轴系部件装配图一张(样图见图7.1和图7.2)2. 设计说明书一份,包括输出轴、输出轴上的轴承及键的校核计算1选择轴的材料因传递功率不大,并对重量及结构尺寸无特殊要求,故选用常用材料45钢,调质处理。
MPa 650=B δ,MPa 360=s δ。
2初算轴径对于转轴,按扭转强度初算轴径,查表11.4得C=106~118;考虑轴端弯矩比转矩小,故取C=106,则mm n P C d 26.34807.210633min =⨯==,考虑键槽的影响, 5.29mm 31.0334.26min =⨯=d 。
3 结构设计(1)轴承部件的结构形式为了方便轴承部件的装拆,减速器的机体采用剖分式机构。
因传递的功率小,齿轮减速器效率高、发热小,估计轴不会长,故轴承部件可采用两端固定方式。
(2)联轴器及轴段1轴段1的设计与联轴器的设计同时进行。
考虑成本因素,选用凸缘联轴器。
查表取5.1=A K ,则计算传递转矩m N T K T A ⋅=⨯⨯⨯==483.5807.21055.95.16,查《机械设计课程设计》p159,取3GY5弹性柱销联轴器,公称转矩为m 500N ⋅,许用转速为8000r/min,轴孔直径范围30mm~42mm ,考虑 5.29mm 3min =d ,取d1=38mm 。
Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:能源科学与工程学院班级:1102301设计者:刘平成学号:1110200724指导教师:唐德威设计时间:2013年6月7日凸轮机构设计1.设计题目(1) 凸轮机构运动简图:(2)凸轮机构的原始参数表2-1.凸轮机构原始参数 序号 升程(mm )升程运动角 升程运动规律升程许用压力角20 110 120° 正弦加速度35°回程运动角回程运动规律 回程许用压力角 远休止角近休止角 90°正弦加速度 65°90°60°(二)凸轮运动方程及相关图像、程序凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图: ○1 凸轮推杆升程、回程方程 πϕπϕϕs)650(πϕ≤≤140)(2=ϕs 511()69πφπ≤≤pi))*5708)/(23.2289)/1.-(sin(2+57083.2289)/1.-(-140(1)(3ϕπϕϕ=s1116()99πφπ≤≤)2914(πϕπ≤≤ 0)(4=ϕs ○2速度方程/2.0944;/2.09440))cos(2-140(1)(1πϕϕ=v 16(2)9πφπ≤≤ 0)(2=ϕv 511()69πφπ≤≤ 708;5708))/1.53.2289)/1.-(cos(2-140(1)(3ϕπϕ=v 1116()99πφπ≤≤ 0)(4=ϕv 16(2)9πφπ≤≤○3加速度方程 .0944^2;/2.0944)/2sin(2280)(1πϕπϕ=a )650(πϕ≤≤0)(2=ϕa 511()69πφπ≤≤08^25708)/1.573.2289)/1.-(sin(2280)(3ϕππϕ=a 1116()99πφπ≤≤ 0)(4=ϕa 16(2)9πφπ≤≤推杆位移、速度、加速度线图matlab编程clear,clcpu=0*pi/180:0.0001:120*pi/180; %升程运动角范围pf=120*pi/180:0.0001:210*pi/180; %远休止角范围pd=210*pi/180:0.0001:300*pi/180; %回程运动角范围pn=300*pi/180:0.0001:2*pi; %近休止角范围h=110e-3; %升程w=10; %凸轮角速度p0=120*pi/180; %升程运动角p01=90*pi/180; %回程运动角ps=90*pi/180; %远休止角%----------推程-----------------------------------------su=h.*(pu./p0-sin(2.*pi.*pu./p0)/(2*pi)); %推杆位移vu=h*w/p0*(1-cos(2*pi*pu./p0)); %推程速度au=2*pi*h*w^2/p0^2*sin(2*pi*pu./p0); %推程加速度%------------远休止----------------------------nf=size(pf);sf=h*ones(nf); %推杆位移vf=zeros(nf); %推程速度af=zeros(nf); %推程加速度%---------------回程------------------------------T=pd-(p0+ps);sd=h/2*(1+cos(pi/p01*T)); %回程位移vd=-pi*h*w/(2*p01)*sin(pi/p01*T); %回程速度ad=-pi^2*h*w^2/(2*p01^2)*cos(pi/p01*T); %回程加速度%--------------------近休止---------------------------------nn=size(pn);sn=zeros(nn); %推杆位移vn=zeros(nn); %推程速度an=zeros(nn); % 推程加速度%------画出推杆位移、速度、加速度线图---------------p=[pu,pf,pd,pn];s=[su,sf,sd,sn];subplot(2,3,1),hold onplot(p,s*1e3,'linewidth',2),xlabel('\phi/rad'),ylabel('s/mm'),grid on,title('推杆位移'),axis([0,2*pi,1.1*min(s)*1e3,1.1*max(s)*1e3]) subplot(2,3,2) v=[vu,vf,vd,vn];plot(p,v,'linewidth',2),xlabel('\phi/rad'),ylabel('v/m/s'),grid on,title('推杆速度'),axis([0,2*pi,1.1*min(v),1.1*max(v)]) subplot(2,3,3) a=[au,af,ad,an];plot(p,a,'linewidth',2),xlabel('\phi/rad'),ylabel('a/m/s^2'),grid on,title('推杆加速度'),axis([0,2*pi,1.1*min(a),1.1*max(a)]) hold off(三)凸轮机构s d ds-ϕ图像及程序代码 %--------------------求ds/d_phi-------------------subplot(2,3,4),plot(v/w*1e3,s*1e3,'linewidth',2),xlabel('ds/d\phi/mm'),ylabel('s/mm'),axis equal,grid on,title('ds/d\phi —s')%---------------------凸轮轴心许用区域--------------------------- alpha_up=35*pi/180; %升程许用压力角 alpha_down=65*pi/180; %回程许用压力角 p1=pi/2-alpha_up; %推程斜率角 p2=alpha_down-pi/2; %回程斜率角 ku=tan(p1); %推程切线斜率 kd=tan(p2); %回程切线斜率 R2=[cos(-p2),-sin(-p2);sin(-p2),cos(-p2)];%推程旋转矩阵 R1=[cos(-p1),-sin(-p1);sin(-p1),cos(-p1)];%推程旋转矩阵 nu=size(pu); for i=1:nu(2)Temp=R1*[vu(i)/w;su(i)];vut(i)=Temp(1); %旋转推程ds/dp-s 曲线 sut(i)=Temp(2); endnd=size(pd); for i=1:nd(2)Temp=R2*[vd(i)/w;sd(i)];vdt(i)=Temp(1); %旋转回程ds/dp-s 曲线 sdt(i)=Temp(2); endfor j=1:nu(2)if sut(j)==min(sut)temu=j; %旋转推程ds/dp-s 曲线后求最低点 end endfor j=1:nd(2)if sdt(j)==min(sdt)temd=j; %旋转回程ds/dp-s曲线后求最低点endendt1=1.2*min(vd/w):0.01:1.2*max(vu/w); %切线定义域t2=min(vd/w)/6:0.01:1.2*max(vu/w);t3=0:0.01:1.2*max(vu/w);s1=ku*(t2-vu(temu)/w)+su(temu); %推程切线s2=kd*(t1-vd(temd)/w)+sd(temd); %回程切线s3=tan(-p1)*t3; %推程起点压力角限制线subplot(2,3,5) %画图hold on,axis equal,grid onplot(v/w*1e3,s*1e3,'linewidth',2)plot(t2*1e3,s1*1e3,'linewidth',1,'color','r')plot(t1*1e3,s2*1e3,'linewidth',1,'color','r')plot(t3*1e3,s3*1e3,'linewidth',1,'color','r')xlabel('ds/d\phi/mm'),ylabel('s/mm'),hold off,title('ds/d\phi—s,轴向许用范围')(四)确定凸轮的基圆半径和偏距、绘制凸轮机圆、偏距圆、理论轮廓曲线---------------画理论廓线图-------------------------e=36e-3;s0=52e-3;r0=sqrt(s0^2+e^2);x=(s0+s).*cos(p)-e.*sin(p);y=(s0+s).*sin(p)+e.*cos(p);x1=r0*cos(p);y1=r0*sin(p);subplot(2,3,6)plot(x*1e3,y*1e3,'linewidth',1),axis equal,grid on,hold on,title('廓线图')plot(x1*1e3,y1*1e3,'linewidth',1,'color','r')%-------------求最小曲率半径-----------------------nx=size(x);nx1=nx(2)-2;dydp=diff(y)./diff(p);%求微分dxdp=diff(x)./diff(p);d2ydp2=diff(dydp)./diff(p(1:nx1+1));d2xdp2=diff(dxdp)./diff(p(1:nx1+1));rho=(dxdp(1:nx1).^2+dydp(1:nx1).^2).^1.5./abs((dxdp(1:nx1).*d2ydp2(1:nx1)-dydp(1:nx1).*d2x dp2(1:nx1)));%理论廓线曲率半径rhomin=min(rho);%最小曲率半径rr=rhomin-3e-3;%----------------实际廓线图----------------X=x(1:nx(2)-1)-rr*dydp./(dxdp.^2+dydp.^2).^0.5;%求实际廓线坐标Y=y(1:nx(2)-1)+rr*dxdp./(dxdp.^2+dydp.^2).^0.5;plot(X*1e3,Y*1e3,'linewidth',2,'color','k')%画实际廓线图Legend('理论廓线','基圆','实际廓线'),axis([1.1*min(x)*1e3,1.1*max(x)*1e3,1.1*min(y)*1e3,1.1*max(y)*1e3])得到基圆半径311mm、偏距36mm。
机械机构创新设计及应用大作业(2015年春季学期)题目:双齿条往复式移动机构原理及结构设计姓名:学号:25班级:1208101专业:机械设计制造及其自动化日期:哈尔滨工业大学机电工程学院要求1按附录的撰写规范独立完成课程论文撰写,拒绝雷同,否则按零分处理2大作业需同时提交打印稿和电子文档予以存档,电子文档由班长收齐(缺电子文档得零分),统一发送至一、设计题目1、设计要求1) 双齿条往复式移动机构原理如下图所示。
1-上齿条 2-下齿条 3-不完全齿轮 4-框架图1 双齿条往复式移动机构原理图2) 当双齿条向右运动时需产生不小于1000N 的推力。
3) 运动的最大速度s 。
4) 往复运动行程±50mmm 。
2、需完成工作1) 论述其原理,给出不卡死的条件。
2) 给出结构设计(必须给出齿条的支承、导向、齿轮的支承)。
3) 提示:图中虽然给出了齿条由两侧推杆支承和导向,也可以把支承和导向设计在齿条上,然后在右侧设计一个推杆。
二、工作原理介绍本装置是利用不完全齿轮的定向转动,通过改变齿轮与齿条的啮合位置来实现往复运动。
假设齿轮转向为逆时针,转速为ω rad/s 。
结合图1所示,当不完全齿轮的有齿部分与上部齿条啮合时,齿条向左运动,速度r v ω-=(向右为正方向);当不完全齿轮的有齿部分与下部齿条啮合时,齿条向右运动,速度r v ω=。
当齿轮与齿条不啮合时,运动台(即齿条)停止运动。
三、不卡死条件如图1所示,当不完全齿轮的轮齿与上下两个齿条同时接触时,机构会出现卡死现象。
为了防止在运动过程中机构卡死,必须保证af r rarcsin 2<α其中:α:齿轮与齿条不啮合时所能的转动角度; f r :不完全齿轮有齿部分齿根圆半径; a r :不完全齿轮有齿部分齿顶圆半径;四、齿轮齿条设计1、齿轮结构设计由不卡死条件:af r r arcsin2<α其中:α:不完全齿轮有齿部分对应的圆心角;f r :不完全齿轮有齿部分齿根圆半径,2/)2(m z r a +=; a r :不完全齿轮有齿部分齿顶圆半径,2/)5.2(m z r f -=;z :完全齿轮齿数。
机械机构创新设计及应用大作业(2016年春季学期)题目:偏心轮-闭合导杆机构原理及设计姓名:学号:班级:专业:机械设计制造及其自动化日期:2016.6.15哈尔滨工业大学机电工程学院要求1按附录的撰写规范独立完成课程论文撰写,拒绝雷同,否则按零分处理2必须双面打印,注意排版,不允许2-3行占一页的情况出现3装订时左上角订一枚钉4打印时去掉附录页5大作业需同时提交打印稿和电子文档予以存档,电子文档由班长收齐(缺电子文档得零分),统一发送至:jkliu@设计题目13——偏心轮-闭合导杆机构原理及设计(3人)设计要求及工作内容偏心轮-闭合导杆机构原理如图1所示,导杆移动行程不小于±10mm,最大推力不小于10N。
图1 摆动导杆与双滑块机构正文1偏心轮-闭合导杆机构原理简单来说,偏心轮-闭合导杆机构是将回转运动转换成往复直线运动的一种机构。
从其机械原理上讲,轮的中心不在旋转点上,一般指代的就是圆形轮,当圆形没有绕着自己的中心旋转时,就成了偏心轮。
偏心轮也是凸轮的一种,其组成的工作机构是一种高副机构,在这里偏心轮为主动件,做等速的连续回转运动,而从动件做直线的往复摆动。
原理图如下:(可以将偏心轮简化成)图2 偏心轮运动原理图从上图来考虑,在不考虑竖直方向的位移时,随着偏心轮的回转运动,水平方向就会产生往复摆动的运动。
图3 偏心轮尺寸图根据图3,不难看出导轨的移动行程为±(e+R),只需保证(e+R)≥10mm即可。
2偏心轮-闭合导杆结构设计图4 设计基本方案考虑到为高副机构,所以增加了偏心轮的厚度。
以减缓由于长时间的线接触,应力大,产生磨损。
在偏心轴两端加轴颈,保证有足够的强度承受住偏心轮转动时的离心力。
图5 动力输入偏心轮动力的传入,选择在偏心轮两端轮轴上伸长轴并加入键和齿轮。
通过齿轮的转动带动轴系的转动,传递到偏心轮上。
设计时,应当计算偏心轮两端轴系的弯矩和扭矩,并保证其寿命可靠。
机械原理大作业大作业一:连杆机构运动分析学生姓名:学号:指导教师:丁刚完成时间:机电工程学院机械设计系制二〇一八年四月连杆机构运动分析1题目(9)图1 设计题目在图1所示的机构中,已知l AB=60mm,l BC=180mm,l DE=200mm,l CD=120mm,l EF=300mm,h=80mm,h1=85mm,h2=225mm,构件1以等角速度ω1=100rad/s 转动。
求在一个运动循环中,滑块5的位移、速度和加速度曲线。
2分析结构1、杆1为RR主动件,绕A以ω1 转动,自由度1.2、4杆和滑块5为RRP II级杆组.,自由度0.3、2,3杆组成II级杆组RRR,自由度0.总共自由度为F=5*3-2*7=1 .由上述的杆组类型,确认出所需运动分析数学模型:同一构件上的点、RRP、RRR。
3.杆组法对平面连杆机构进行运动分析3.1对主动件杆1 RR I级构件的分析主动杆1转角:φ= [0°,360°) δ=0°,则φ’=ω1=100 rad/s角加速度φ’’=0.已知h2=225mm, h=80mm, l AB=60mm 所以A(225mm,80mm)A点速度(0,0),加速度(0,0)B点位置(x A+l AB*cos(φ), Y A+l AB*sin(φ))B点速度(-l AB*sin(φ), l AB*cos(φ)),加速度(-l AB*cos(φ), -l AB*sin(φ))3.2RRRII 级杆组分析(模型参考教材P37-38)图3 如图所示两个构件组成II 级杆组。
已知了B 的位置(x B ,y B )= (x A +l AB *cos(φ), Y A +l AB *sin(φ)),速度(x ’B ,y ’B ) 和加速度(x ’’B ,y ’’B ), 已知运动副D (0,0), 还可知,x ’D =y ’D =0, x ’’D =y ’’D =0. l BC =180 mm, l CD = 120mm所以,x c =x D +l CD *cos(φi)= x B +l BC *cos(φj) y c =x D +l CD *sin(φi)= x B +l BC *sin(φi) 对于φ的求解: A 0=2*l CD (x B -x D ) B 0=2*l BC (y B -y D ) C 0=l CD 2+ l BD 2- l BC 2为了保证机构的装配正常:l BD ≤l CD + l BC AND l BD ≥Abs (l CD - l BC )可求3杆的转角φi=2*arctan((B 0±sqrt (A 02 + B 02- C 02))/(A 02+ C 02)),角速度w3=φi ’和角加速度α3= φi ’’3.3 同一构件上的点(模型参考书P35-36)Φiφjφi已知D(0,0),速度(0,0),加速度(0,0),3杆转角φi 角速度φi’角加速度φi’’,Φi和它的导数在3.2都有体现LDE= 200mm可求出E的坐标,速度,加速度.x E =x c+lCE*cos(φi)y E =x C+lCE*sin(φi)同样地,速度、加速度通过求导即可得出算式,可以编出程序。
哈尔滨工业大学机械设计作业设计计算说明书题目:设计螺旋起重器系别:机械设计制造及其自动化班号:姓名:日期:哈尔滨工业大学机械设计作业任务书题目:设计螺旋起重器设计原始数据:螺旋起重器是一种简单的起重装置,用手推动手柄即可提升重物。
它一般由底座、螺杆、螺母、托杯、手柄、或扳手等零件所组成。
已知数据:起重量:50kN 最大起重高度:150mm。
目录一、设计题目-----------------------------------------------------------------------------------------------------2二、螺母、螺杆选材-------------------------------------------------------------------------------------------2三、螺杆、螺母设计计算3.1 耐磨性计算-----------------------------------------------------------------------------------------------2 3.2 螺杆强度校核--------------------------------------------------------------------------------------------3 3.3 螺纹牙强度校核-----------------------------------------------------------------------------------------3 3.4 螺纹副自锁条件校核----------------------------------------------------------------------------------43.5 螺杆稳定性校核-----------------------------------------------------------------------------------------4四、螺母外径及凸缘设计------------------------------------------------------------------------------------5五、手柄设计----------------------------------------------------------------------------------------------------5六、底座设计----------------------------------------------------------------------------------------------------6七、其余各部分尺寸及参数---------------------------------------------------------------------------------7八、参考资料-----------------------------------------------------------------------------------------------------8一、 设计题目螺旋起重器(千斤顶)已知条件:起重量F Q =50KN ,最大起重高度H=150mm 。
《机械机构创新设计及应用》大作业(2014年春季学期)大作业一题目:两个齿条机构串联组合的位移机构原理及结构设计1 大作业二题目:柔性铰链及其应用姓名崔晓蒙学号1110811005班级1108110班专业机械设计制造及其自动化报告提交日期2014.6.11哈尔滨工业大学机电工程学院大作业要求1.完成课堂布置的2道大作业题,拒绝雷同和抄袭,否则均为零分;2.大作业最好包含自己的体会等;3.大作业统一用该模板撰写,字数不限,表达清晰完整即可;4.正文格式:小四号字体,行距为1.25倍行距;5.用A4纸双面打印(节约用纸);左侧装订,1枚钉;6.大作业需同时提交打印稿和电子文档予以存档,电子文档由班长收齐(缺电子文档得零分),统一发送至:shanxiaobiao@;7.此页不得删除。
评语:教师签名:年月日题目一设计题目5——两个齿条机构串联组合的位移机构原理及结构设计1 (2人)1设计要求1) 两个齿条串联的位移机构如图1所示1、2-齿条r1'、r2'—双联齿轮的节圆半径S1、S2—位移量图1 两个齿条串联的位移机构原理图说明:图1中,气缸活塞推动齿条1运动,双联齿轮位置不变2) 齿条2需产生不小于1000N的推力3) 运动的最大速度0.1m/s4) 往复运动行程±300mm2需完成工作1) 论述其原理,给出上齿条(齿条2)的位移S2与气缸位移为S1之间的关系。
2) 给出大致的结构设计(必须给出齿条的支承、导向、齿轮的支承,气缸不需要设计)1.该机构的工作原理及应用场合1.1结构分析由结构简图分析可知,这种两个齿条机构串联组合的位移机构由两个齿条及其对应的导轨,节圆半径分别为r 1'、r 2'的双联齿轮及其固定轴和一个气缸组合而成。
气缸是它的动力源,最终所需要的运动或者动力由上面的齿条2输出,所以它属于执行件,而中间固定的齿轮则属于传动件。
该机构属于扩大位移机构,细分的话属于齿轮齿条行程放大机构,通过双联齿轮的节圆半径不同,可以实现位移的扩大或者缩小(本例子属于扩大)或者输出力的扩大或缩小(本例属于缩小),以实现实际生产应用中对于位移和力的要求。
机械原理大作业(二)作业名称:凸轮机构设计设计题目:23题院系:班级:设计者:学号:指导教师:设计时刻:哈尔滨工业大学机械设计1.运动分析题目:设计直动从动件盘形凸轮机构,其原始参数见下表2.确信凸轮机构推杆升程、回程运动方程(设定角速度为ω=10 rad/s)升程:0°< Φ < 120°由公式可得:s=60-60*cos(3*Φ/2);v=90*ω*sin(3*Φ/2);a=135*ω2 *cos(3*Φ/2);远停止:120°< Φ < 200°由公式可得:s=120;v=0;a=0;回程:200°< Φ < 290°由公式可得:s=h[1-(10T23-15T24+6T25)]v=(-30hω1/Φ0')T22(1–2T2+T22)a=(-60hω12/Φ0'2)T2(1–3T2+2T22)式中:T2=(Φ-Φ0-Φs)/ Φ0'近停止: 290°< Φ < 360°由公式可得:s=0;v=0;a=0;3.绘制推杆位移、速度、加速度线图(设ω=10rad/s)1) 推拉位移曲线代码:%推杆位移曲线;x=0:(pi/1000):(2*pi/3);s1=60-60*cos(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);s2=120;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;s3=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));m=(29*pi/18):(pi/1000):(2*pi);s4=0;plot(x,s1,'b',y,s2,'b',z,s3,'b',m,s4,'b'); xlabel('角度(rad)');ylabel('行程(mm)');title('推杆位移曲线');grid;2)推杆速度曲线代码:%推杆速度曲线;w=10;x=0:(pi/1000):(2*pi/3);v1=90*w*sin(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);v2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;v3=(-30*120*w/(pi/2))*T2.^2.*(1-2*T2.^2+T2.^2); % v3=-120*w*sin(2*z-20*pi/9);m=(29*pi/18):(pi/1000):(2*pi);v4=0;plot(x,v1,'r',y,v2,'r',z,v3,'r',m,v4,'r'); xlabel('角度(rad)');ylabel('速度(mm/s)');title('推杆速度曲线(w=10rad/s)');grid;3)凸轮推杆加速度曲线代码:%凸轮推杆加速度曲线;w=10;x=0:(pi/1000):(2*pi/3);a1=135*w^2*cos(3*x/2);y=(2*pi/3):(pi/1000):(10*pi/9);a2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;a3=(-60*120*w^2/(pi/2)^2)*T2.*(1-3*T2.^2+2*T2.^2); m=(29*pi/18):(pi/1000):(2*pi);a4=0;plot(x,a1,'m',y,a2,'m',z,a3,'m',m,a4,'m');xlabel('角度(rad)');ylabel('加速度(mm/s^2)');title('凸轮推杆加速度曲线(w=10rad/s)');grid;4)绘制凸轮机构的dd/dd−d线图,并依次确信凸轮的基圆半径和偏距代码:%dd/dd−d线图,确信e,s0;x=0:(pi/1000):(2*pi/3);s1=60-60*cos(1.5*x);ns1=90*sin(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);s2=120;ns2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));ns3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4 ;m=(29*pi/18):(pi/1000):(2*pi);s4=0;ns4=0;x1=0:pi/36000:pi/2;s1n=60-60*cos(1.5*x1);v1=90*sin(1.5*x1);m1=diff(s1n);%求切线1n1=diff(v1);z=m1./n1;for i=1:length(z);if abs(z(i)+tan(-55*pi/180))<0.001;breakendendb11=s1n(i)-z(i)*v1(i);x1=-300:200;y01=z(i)*x1+b11;%切线1k1=z(i);plot(x1,y01)x3=10*pi/9:pi/36000:14*pi/9;%求切线2s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));v3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4 ;m3=diff(s3n);n3=diff(v3);p=m3./n3;for o=1:length(p);if abs(p(o)-tan(-25*pi/180))<0.01;breakendendo;b33=s3n(o)-p(o)*v3(o);x3=-300:700;y03=p(o)*x3+b33;%切线2plot(x3,y03);sym uv[u,v]=solve('u= 1.4281*v-81.7665','u=-0.4663*v-59.6715');%v=11.66332347972972972972972972973 x%u=-65.110107738597972972972972972973 yplot(ns1,s1,'m',ns2,s2,'b',ns3,s3n,'b',ns4,s4,'b',x1,y01,'g',x3,y03,'g',v,u,'*'); xlabel('ds/d¦µ');ylabel('S');axis([-300,200,-300,300]);title('s0,e 的确信');grid;确信凸轮基圆半径与偏距:偏距e=90mm,d020mm;基圆半径为d0=150mm。
机械机构创新设计及应用大作业(2015年春季学期)题目: 双齿条往复式移动机构原理及结构设计姓名:学号:1120810125 班级: 1208101专业: 机械设计制造及其自动化日期:2015.6.5哈尔滨工业大学机电工程学院要求1 按附录的撰写规范独立完成课程论文撰写,拒绝雷同,否则按零分处理2 大作业需同时提交打印稿和电子文档予以存档,电子文档由班长收齐(缺电子文档得零分),统一发送至:jkliu@一、设计题目1、设计要求1)双齿条往复式移动机构原理如下图所示2 3 41-上齿条2-下齿条3-不完全齿轮4-框架图1双齿条往复式移动机构原理图2)当双齿条向右运动时需产生不小于1000N的推力。
3)运动的最大速度0.05m/s。
4)往复运动行程土50mmm。
2、需完成工作1)论述其原理,给出不卡死的条件。
2)给出结构设计(必须给出齿条的支承、导向、齿轮的支承)。
3)提示:图中虽然给出了齿条由两侧推杆支承和导向,也可以把支承和导向设计在齿条上,然后在右侧设计一个推杆。
二、工作原理介绍本装置是利用不完全齿轮的定向转动,通过改变齿轮与齿条的啮合位置来实现往复运动。
假设齿轮转向为逆时针,转速为■ rad/so结合图1所示,当不完全齿轮的有齿部分与上部齿条啮合时,齿条向左运动,速度v = -「r (向右为正方向);当不完全齿轮的有齿部分与下部齿条啮合时,齿条向右运动,速度v=「r。
当齿轮与齿条不啮合时,运动台(即齿条)停止运动。
三、不卡死条件如图1所示,当不完全齿轮的轮齿与上下两个齿条同时接触时,机构会出现卡死现象。
为了防止在运动过程中机构卡死,必须保证r f:2 arcs in其中:::齿轮与齿条不啮合时所能的转动角度;r f :不完全齿轮有齿部分齿根圆半径;r a:不完全齿轮有齿部分齿顶圆半径;四、齿轮齿条设计1、齿轮结构设计由不卡死条件:::2 arcsin^其中:::不完全齿轮有齿部分对应的圆心角;r f :不完全齿轮有齿部分齿根圆半径,r^ (z 2)m/ 2 ;r a:不完全齿轮有齿部分齿顶圆半径,r f =(z-2.5)m/2 ;z:完全齿轮齿数。
哈尔滨工业大学机械设计作业设计计算说明书题目: 轴系部件设计系别: 英才学院班号: 1436005姓名: 刘璐日期: 2016.11.12哈尔滨工业大学 机械设计作业任务书题目: 轴系部件设计设计原始数据:图1表 1 带式运输机中V 带传动的已知数据方案 d P (KW ) (/min)m n r(/min)w n r1i轴承座中心高H (mm )最短工作 年限L 工作环境 5.1.2496010021803年3班室外 有尘机器工作平稳、单向回转、成批生产目录一、带轮及齿轮数据 (1)二、选择轴的材料 (1)三、初算轴径d min (1)四、结构设计 (2)1. 确定轴承部件机体的结构形式及主要尺寸 (2)2. 确定轴的轴向固定方式....................................... 错误!未定义书签。
3. 选择滚动轴承类型,并确定润滑、密封方式 .................. 错误!未定义书签。
4. 轴的结构设计................................................ 错误!未定义书签。
五、轴的受力分析 (4)1. 画轴的受力简图 (4)2. 计算支承反力 (4)3. 画弯矩图 (5)4. 画扭矩图 (5)六、校核轴的强度 (5)七、校核键连接的强度 (7)八、校核轴承寿命 (8)1. 计算轴承的轴向力 (8)2. 计算当量动载荷 (8)3. 校核轴承寿命 (8)九、绘制轴系部件装配图(图纸) (9)十、参考文献 (9)一、带轮及齿轮数据已知带传动输出轴功率P= 3.84 kW,转矩T= 97333.33 N·mm,转速n= 480 r/min,轴上压力Q = 705.23 N,因为原本圆柱直齿轮的尺寸不满足强度校核,故修改齿轮尺寸为分度圆直径d1 =96.000 mm,其余尺寸齿宽b1 = 35 mm,螺旋角β = 0°,圆周力F t = 2433.33 N,径向力F r = 885.66 N,法向力F n = 2589.50 N,载荷变动小,单向转动。
哈尔滨工业大学机械设计作业设计计算说明书题目_轴系部件设计_____系别___能源学院________班号____0902103________姓名____ _______指导教师___________日期_2011年12月5日__目录机械设计作业任务书 (3)1选择材料,确定许用应力 (4)2按扭转强度估算轴径 (4)3设计轴的结构 (4)4轴的受力分析 (6)4.1画轴的受力简图 (6)4.2计算支承反力 (6)4.3画弯矩图 (7)4.4画转矩图 (7)5校核轴的强度 (8)6轴的安全系数校核计算 (9)7校核键连接的强度 (10)8校核轴承的寿命 (11)8.1计算当量动载荷 (11)8.2校核寿命 (12)9轴上其他零件设计 (12)10轴承座结构设计 (12)11轴承端盖(透盖) (13)12参考文献 (13)哈尔滨工业大学机械设计作业任务书题目 ___轴系部件设计____设计原始数据:传动方案如图5.1图5.11选择材料,确定许用应力通过已知条件和查阅相关的设计手册得知,该传动机所传递的功率属于中小型功率。
因此轴所承受的扭矩不大。
故选45号钢,并进行调质处理。
2按扭转强度估算轴径对于转轴,按扭转强度初算直径:min d ≥ 其中2P ——轴传递的功率,0130.95 2.85m P P kW η=⨯=⨯= m n ——轴的转速,r/minC ——由许用扭转剪应力确定的系数。
查表10.2得C=106~118,考虑轴端弯矩比转矩小,取C=106。
min d mm ∴≥ 由于考虑到轴的最小直径处要安装大带轮,会有键槽存在,故将其扩大5%,得22.6474k d mm ≥,按标准GB2822-81的10R 圆整后取125d mm =。
3设计轴的结构由于本设计中的轴需要安装带轮、齿轮、轴承等不同的零件,并且各处受力不同,因此,设计成阶梯轴形式,共分为七段。
以下是轴段的草图:轴段⑦轴段⑥轴段⑤ 轴段④ 轴段③ 轴段②轴段①3L 2L 1L3.1 阶梯轴各部分直径的确定1) 轴段1和轴段7轴段1和轴段7分别安放大带轮和小齿轮,所以其长度由带轮和齿轮轮毂长度确定,而直径由初算的最小直径得到。
机械机构创新设计及应用大作业(2015年春季学期)题目:倒数机构原理及结构设计姓名:韩威学号:1120810613班级:1208106专业:机械设计制造及其自动化日期:2015.6.8哈尔滨工业大学机电工程学院要求1按附录的撰写规范独立完成课程论文撰写,拒绝雷同,否则按零分处理2大作业需同时提交打印稿和电子文档予以存档,电子文档由班长收齐(缺电子文档得零分),统一发送至:jkliu@正文设计题目11——倒数机构原理及结构设计(1人)设计要求及工作内容倒数机构原理如图1所示,y为输入量,R为输出量, AOB=90°1、2-滑块3-槽板式杠杆图1 倒数机构原理图需完成工作1) 给出输入量(y)和输出量(R)的关系及计算过程2) 给出当输入量(y)不大于5mm情况下的结构设计1 输入量(y)和输出量(R)的关系及计算过程输入量(y)和输出量(R)的关系及计算过程图1所示为倒数机构的原理图,由两个滑块1和2以及一个两臂成90角的槽板式杠杆组成。
滑块1的左右滑动距离为输入量y,杠杆会绕着O点摆动,此时滑块2就会有一个输出的左右滑动距离R。
对于两个直角三角形OAC∆和BOD∆,由于AOC=OBD∠∠,两个三角形相似,易得下式:OC DBAC OD=即21a ll b=,因为12l l和可以看做是输入量y和输出量R所以R=1yab,为了满足倒数运算要求,需要ab=1mm2,无论如何取a和b,对于加工都是难以实现的,因此考虑放大ab,放大ab会导致R被放大一定的倍数,此时在输出端加一个杠杆机构令输出量缩小相应的倍数,即可满足倒数机构的要求。
2 当输入量(y)不大于5mm情况下的结构设计2.1 各长度之间的关系输入量(y)不大于5mm,此时可以知道滑块1与杠杆的AO部分的槽的长度有一定的限制,当输入量(y)最小时y=0,连接点处于槽的最上端,此时l1=l1max,当输入量(y)最大时y=5mm,连接点处于槽的最下端,此时l1=l1max-5mm,所以槽的长度为X=。
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目: 凸轮机构设计院系:班级:设计者:学号:指导教师:哈尔滨工业大学一、设计题目如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数,据此设计该凸轮机构。
凸轮机构原始参数序号升程(mm)升程运动角升程运动规律升程许用压力角27130150正弦加速度30°回程运动角回程运动规律回程许用压力角远休止角近休止角100°余弦加速度60°30°80°二. 凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图凸轮推杆升程运动方程:)]512sin(2156[130s ϕππϕ-= )512sin(4.374)]512cos(1[156v 211ϕπϕπωω=-=a% t 表示转角,s 表示位移t=0:0.01:5*pi/6;%升程阶段s= [(6*t)/(5*pi )- 1/(2*pi )*sin(12*t/5)]*130; hold on plot(t ,s ); t= 5*pi/6:0。
01:pi; %远休止阶段s=130; hold on plot(t,s );t=pi :0.01:14*pi/9;%回程阶段s=65*[1+cos(9*(t-pi )/5)]; hold on plot(t ,s );t=14*pi/9:0.01:2*pi ;s=0;hold onplot(t,s);grid onhold off%t表示转角,令ω1=1t=0:0。
01:5*pi/6;%升程阶段v=156*1*[1-cos(12*t/5)]/pi hold onplot(t,v);t= 5*pi/6:0。
01:pi;v=0hold onplot(t,v);t=pi:0.01:14*pi/9;%回程阶段v=—117*1*sin(9*(t—pi)/5) hold onplot(t,v);t=14*pi/9:0。
机械设计大作业轴系部件设计说明书题目:行车驱动装置的传动方案如下图所示。
室内工作、工作平稳、机器成批生产,其他数据见下表。
方案电动机工作功率P d/kW电动机满载转速n m/(r/min)工作机的转速n w/(r/min)第一级传动比i1轴承座中心高H/mm最短工作年限5.4.4 2.2 940 60 3.2 200 5年2班一选择轴的材料因为传递功率不大,轴所承受的扭矩不大,故选择45号钢,调质处理。
二初算轴径d min对于转轴,按扭转强度初算直径d min≥C√P n m3式中 P——轴传递的功率;C——由许用扭转剪应力确定的系数;n——轴的转速,r/min。
由参考文献[1] 表10.2查得C=106~118,考虑轴端弯矩比转矩小,故取C=106。
输出轴所传递的功率:P3=P d·ηV带·η轴承=2.2×0.96×0.99=2.09088 kW高速轴的转速:n m=n wi1=940315100=298.413 r/min代入数据,得d≥C√P n m3=106√2.09088 298.4133=20.284 mm考虑键的影响,将轴径扩大5%, d min≥20.284×(1+5%)=21.30 mm。
三结构设计1.轴承部件机体结构形式及主要尺寸为了方便轴承部件的装拆,减速器的机体采用剖分式结构。
取机体的铸造壁厚δ=8mm,机体上的轴承旁连接螺栓直径d2=12 mm,C1=18 mm,C2=16 mm,为保证装拆螺栓所需要的扳手空间,轴承座内壁至坐孔外端面距离L=δ+C1+C2+(5~8)mm=47~50 mm取L=48 mm。
2.轴的结构设计本设计方案是有6个轴段的阶梯轴,轴的径向尺寸(直径)确定,以外伸轴径d1为基础,考虑轴上零件的受力情况、轴上零件的装拆与定位固定、与标准件孔的配合、轴的表面结构及加工精度等要求,逐一确定其余各轴段的直径;而轴的轴向尺寸(长度)确定,则考虑轴上零件的位置、配合长度、支承结构情况、动静件间的距离要求等因素,通常从与传动件的轴段开始,向两边展开。