基于MSP430F5529的循迹壁障无线控制智能小车设计报告 精品
- 格式:doc
- 大小:1.19 MB
- 文档页数:38
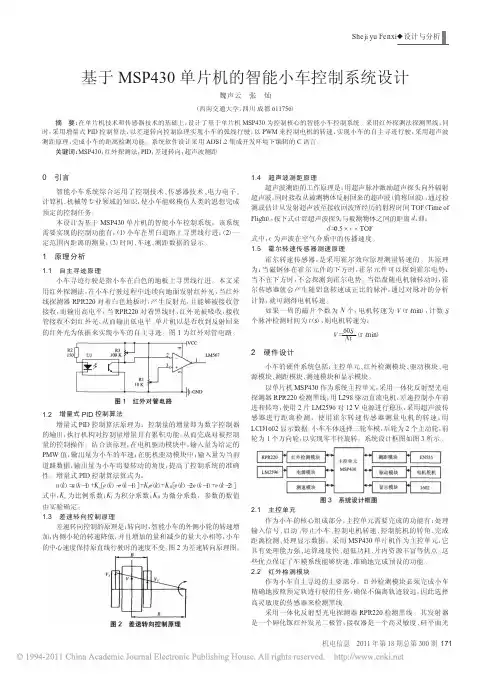
基于MSP430单片机循迹小车课程设计报告课程设计报告课程名称嵌入式系统原理与设计课题名称智能循迹小车专业通信工程班级1101班学号姓名指导老师2014 年 1 月 5 日1.系统总设计1.1 功能说明本课题是基于MSP430单片机循迹智能小车的设计与实现,小车系统以MSP430单片机为系统控制处理器,采用红外传感器对赛道进行道路检测,单片机根据检测到的信号的不同状态判断小车的当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车的控制。
1.2 任务分配情况参与此次项目制作的一共七人,分别是:张振凤,冯志成,肖新加,戴小敏,杨小林,谢鹏华和张莹任务分配情况如表1所示:表1 任务分配情况冯志成张莹红外循迹模块肖新加,代小敏,杨小林电机驱动模块张振凤谢鹏华写程序,各接口的连接,数据的收集及小车的调试1.3 使用说明书产品名称:智能循迹小车技术参数:L298N基本参数:类型:半桥输入类型:非反相输出数: 4电流输出/同道:2A 电流峰值输出:3A工作温度:-25~135°C 器件型号:L298N产品的使用方法:用六节干电池9V直流电压作为供电电源,接通电源,在有黑线的跑道上行走。
注意事项:1、所用电源不能超过9V,以免电压过大,把电机烧坏。
2、小孩使用时,应在大人的陪同下使用,以免被小车的尖锐部分弄伤。
3、轻拿轻放,以免损坏小车器件。
4、长期不使用时,应把电池取出。
生产日期:20xx年xx月xx日2.硬件设计此次项目中硬件部分的设计主要包含以下模块:电源模块,红外循迹模块,电机驱动模块和MSP430f149单片机。
2.1 电源模块模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。
在本设计中,在本设计中,msp430单片机使用5V电源,电机使用5V电源。
用了6节1.5V的电池,为单片机和电机供电。
基于MSP430的智能小车寻迹模块设计方案
本文详细介绍了反射式光电传感器寻迹模块的工作原理,寻迹模块的电路0 引言
智能小车又称轮式移动机器人,能够按预设模式在特定环境中自动移动,无需人工干预,可用于科学勘测、现代物流等方面。
针对路面采用黑色标记线条作为路径引导线的应用场合,反射式光电传感器是常用的路径识别传感器。
反射式光电传感器因信号处理方式和物理结构简单的特点而被广泛应用于结构化环境和低成本产品中,虽然存在检测距离近、预测性差的弱点,但通过合理设计和选择反射式光电传感器并结合合适的信息处理软件能够满足上述简单环境场合应用。
随着汽车ECU 电子控制的发展,在汽车上配备远程信息处理器,传感器和接收器,通过这些器件的协调控制可以实现汽车的无人驾驶。
本文提出基于MSP430 单片机的控制装置,通过反射式光电传感器寻迹,MSP430 单片机处理反射式光电传感器检测到的信号,从而控制智能车的转向,实现智能小车的自动寻迹。
1 系统总体设计方案
在小车车体的前端贴近地面的地方安装有4 组寻迹模块,如
单片机通过判断当前的运行状态,然后对L298 驱动模块进行相应的操作。
当正常时,不进行调整;当左偏时,通过对L298 驱动模块进行调整,使小车的左轮速度大于右轮速度,即可实现小车向右调整。
由于左偏有三种情形,但每种情形只是使能端的PWM 参数不同。
当右偏时,处理流程与左偏类似。
2 寻迹模块的硬件设计
绘制完成的反射式光电传感器电路。
0引言近年来,新能源汽车的数量与日俱增[1,2],电动汽车也是未来的汽车的发展趋势。
充电问题也随之产生,而充电桩少是急需解决的问题。
目前大部分都是利用充电桩进行静态充电,这种方法需要车子在不工作的情况下进行,而不能运行时充电,本设计致力于设计出一种动态充电系统,减少我们静态充电时间,同时也缓解了充电桩少的问题[3]。
1总体方案设计1.1系统总体设计本小车系统由红外循迹模块、电机控制模块、无线充电模块、超级电容装置组成。
图1无线充电小车控制框图1.2控制系统方案选择方案一:采用MSP430F5529单片机最小系统。
MSP430F5529是低功耗的16位单片机,采用这块芯片降低了功耗,增强使用时间,降低系统设计的难度,方便的对硬件做随时检修以及更换,而且系统可靠性高,所占空间小,非常适合本系统的设计。
方案二:采用搭建简易单片机系统。
搭建单片机系统可以方便的对硬件做随时修改,也易于搭建,但是系统连线较多,不仅相互干扰,使电路杂乱无章,而且系统可靠性低,不适合本系统使用。
方案三:自制单片机印刷电路板自制印刷电路实现较为困难,实现周期长,此外也会花费较多的时间,影响整体设计进程。
由于直流稳压电源只输出5V、1A,需要控制小车负重,同时自制单片机困难、耗时,且体积大、较重。
同时,MSP430单片机是一种16位超低功耗、具有精简指令(RISC)的混合信号处理器,为了更好的节能省电,因此,我们选择方案一。
1.3小车设计方案一:设计小车为四轮小车,小车采用四轮驱动,每一个车轮都由一个直流电机控制。
底盘为坚固的亚克力板,以防止小车变型;该小车优点在于抓地性比较好,直线行驶过程中方向不易改变,但耗费电量速度较快,影响其爬坡能力。
方案二:设计小车车体为三轮小车,小车采用两轮驱动,两轮各用一个直流电机执行,前轮为一万向轮。
耗费电量速度慢,但方向容易改变,我们将万向轮固定住,综合考虑采用方案二。
1.4无线充电系统设计方案一:利用无线充电模块,将超级电容充满电。
2013年电子工程学院“MSP430单片机”设计竞赛竞赛论文作品题目905无线智能遥控小车组员:曹睿智郭晋阳张拨2013年6月17日目录一、引言 (3)二、论证方案 (4)2.1无线遥控论证方案 (4)2.2 电机驱动论证方案 (4)三、系统设计 (5)3.1 系统需求分析 (5)3.2 无线模块 (6)3.3 功能芯片430 (7)3.4 驱动电路及驱动芯片LM298 (8)3.5 编程软件及其下载器 (9)四、系统实现 (9)4.1 系统实现概述 (9)五、软件设计 (10)5.1 主控程序流程图 (11)六、系统调试与测试 (12)6.1 系统功能检测 (12)6.2 检测过程 (12)七、总结 (13)附录:程序 (14)参考文献....................................................................................................... 错误!未定义书签。
0905无线智能小车设计1 引言无线通信主要包括微波通信和卫星通信。
微波是一种无线电波,它传送的距离一般只有几十千米。
但微波的频带很宽,通信容量很大。
微波通信每隔几十千米要建一个微波中继站。
卫星通信是利用通信卫星作为中继站在地面上两个或多个地球站之间或移动体之间建立微波通信联系。
无线通信(Wireless Communication)是利用电磁波信号可以在自由空间中传播的特性进行信息交换的一种通信方式,近些年信息通信领域中,发展最快、应用最广的就是无线通信技术。
在移动中实现的无线通信又通称为移动通信,人们把二者合称为无线移动通信。
从最初的电报开始,经过150多年的现代电信的发展是来自各界的成千上万科学家、工程师和研究人员的辛勤劳动的结果。
他们当中只有少数独立负责发明的人成了名,而大多数达到顶点的发明是许多个人的成果。
nRF905采用Nordic公司的VLSI ShockBurst技术。
评语:指导教师:年月日遥控智能小车设计09级2012年7 月5 日目录1. 设计任务 (1)1.1 任务描述 (1)1.2 技术指标 (1)1.3 难点分析 (1)2 方案比较与论证 (2)2.1 总体方案比较与论证 (2)2.2 电源模块选择方案 (2)2.3 电机驱动模块的选择方案 (2)2.4 避障模块的选择方案 (3)2.5 循迹模块的选择方案 (3)2.6 无线遥控模块的选择方案 (3)2.7 小结 (3)3. 系统硬件设计 (4)3.1 总体设计 (4)3.2 主控制模块电路分析 (5)3.3 电源电路模块电路分析 (6)3.4 电机驱动模块电路分析 (7)3.5 循迹检测模块电路分析 (8)3.6 红外避障模块电路分析 (8)3.7 无线遥控模块RNF24L01电路分析 (9)3.8 小结 (10)4. 系统仿真与软件设计 (11)4.1 小车遥控板块仿真与分析 (11)4.2 小车控制板块仿真与分析 (11)4.3 无线部分软件设计 (12)4.4 循迹部分软件设计 (14)4.5 显示部分软件设计 (15)4.4 小结 (15)5. 系统调试与组装 (16)5.1 电路板 (16)5.2 样机功能 (17)5.3 小结 (17)6. 结论 (18)7. 参考文献 (19)8. 附录:部分程序 (20)8.1 遥控发送部分主函数 (20)8.2 小车控制接收部分主函数 (21)1. 设计任务1.1 任务描述本设计以A T89C52单片机最小系统作为控制与检测的核心,用L298N为主控芯片组成的驱动模块作为直流电机驱动,用主控芯片为ST188组成的反射式红外传感器进行寻黑线,进而实现智能小车的循迹功能。
用红外避障进行避障,并用一个液晶进行小车运行状态显示,无线遥控实现对小车的无线控制。
此设计是集循迹、避障、测距、遥控于一体的智能小车。
(1)自制遥控器控制选择小车的运动方式(模式)。
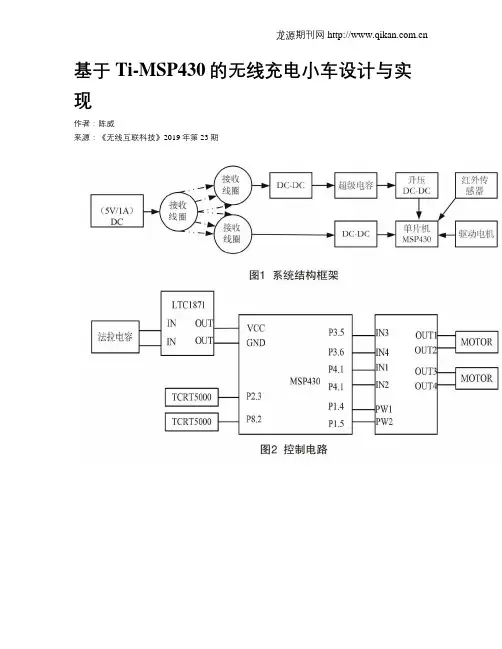
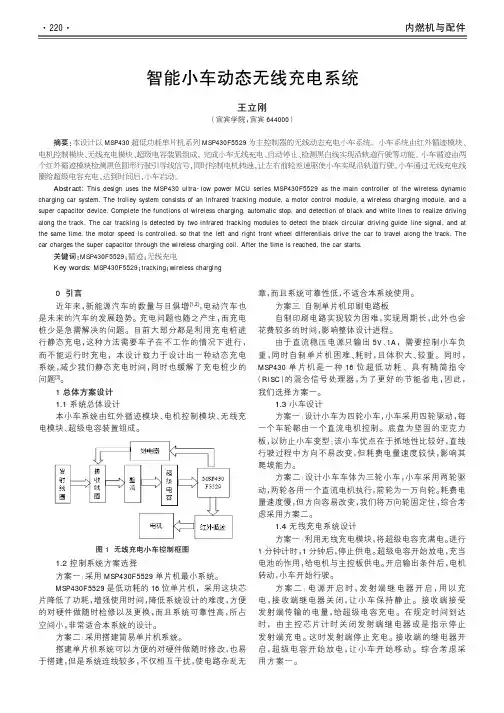
基于Ti-MSP430的无线充电小车设计与实现作者:***来源:《无线互联科技》2019年第23期摘要:电动汽车如今成为整个汽车行业关注的对象。
随着电动汽车技术的快速发展,传统式电动汽车充电方式的一系列问题都被暴露出来,阻碍了电动汽车市场快速发展。
随着无线充电传输技术被引入电动汽车充电领域,尤其是自动泊车和自动驾驶的技术逐渐成熟,人们对无线充电的需求也越来越强烈。
文章提出了一种基于Ti-MSP430的无线充电小车设计。
关键词:MSP-EXP430F5529LP;无线充电;电动小车1 设计方案本设计以MSP-EXP430F5529LP为核心,利用电磁感应原理,线圈与发射线圈配合对超级电容进行充电并为MSP430供电,并通过DC-DC升压模块得到稳定电压为驱动电机供电。
将充电小车放置在发射线圈上,自动充电一分钟,充电完成后能自启动并完成相应功能。
本设计把能够实现无线充电并能自动识别充电时间的车模和控制器看作一种自动控制系统,该系统由单片机、无线充电、电机驱动和法拉电容蓄电4个部分组成。
其中,5 V/1 A的直流电源为无线发射端提供电源,使用TI无线充电发射模块(BQ500211)和接收模块(BQ51013A)进行无线充电。
使用BOOST结构设计稳压电路,使法拉电容输入输出稳定的电压,以延长其使用寿命,再由驱动电路控制电机的运转。
系统框架如图1所示。
2 硬件电路设计2.1 主控电路的设计由于赛题要求只能选用TI公司的处理器作为主控,在综合了几款TI的处理器后,结合本组的知识储备,选用TI MSP430芯片。
控制原理如图2所示。
2.2 单元电路的设计2.2.1 无线充电发射接收模块TI公司提供了一种无线电源发射器和接收器的控制芯片,可支持WPC联盟Qi协议标准。
本设计采用了TI的一款BQ500211新型发射器控制芯片,同时该芯片也符合Qi标准,能实现对基站和移动设备进行智能化控制[1]。
另一块为BQ51013A的集成性接收器控制芯片,由低压降稳压器、低阻抗全同步整流器、电压和电流环路组成,整个功耗保持了高效率和低功耗耗散,为相应设备提供了稳定的DC输出和具有稳定性的控制反馈[2]。
基于MSP430F5529的多功能电子琴章仕波1 吴晓庆2(1.杭州电子科技大学,通信工程卓越工程师计划 11081522;2.杭州电子科技大学,通信工程卓越工程师计划 11081428)摘要:本电子琴以MSP430为核心,用MSP430的launchpad为开发工具和以CCS5.1为开发环境,以YF017语言芯片控制喇叭发声,用MSP430的比较器实现电容按键作为琴键,液晶屏LCD5110显示菜单,6个按键开关操作菜单。
系统特色:1)声音与钢琴相似度高;2)人机交互良好,可以进行功能选择;3)有自由模式,能自由演奏曲子;4)试听模式,能欣赏多首曲子;5)学习模式,可以根据屏幕的提示学习演奏曲子。
关键词:电容按键、多功能0引言依据《单片机与嵌入式系统课程设计Ⅰ》以及指导老师要求,在一块型号为MSP430F5529的单片机板子上完成创意型的设计。
通过我们的头脑风暴和各类资料搜集,我们决定设计一个多功能的电子琴。
1设计想法实现电子琴的基本功能—演奏,为提高人机交互性,加入LCD屏幕能显示菜单;同时为了提高电子琴的功能性,加入欣赏功能、学习功能。
为了使琴键更加舒适,采用了当前流行的触摸按键实现。
2功能实现硬件部分分成发声部分、LCD显示部分、菜单按键部分、电容触摸琴键部分、MCU控制部分(采用现成的MSP430F5529的launchpad)。
2.1 发声部分:方案一:采用蜂鸣器发声,通过单片机IO口输出频率可由软件控制的PWM波。
主要优点是电路简单,成本低,可靠性好,占用单片机的引脚数少。
缺点是因为是PWM波驱动蜂鸣器的,所以声音没有钢琴的音色,声音不够悦耳。
要通过单片机的计时器实现PWM波。
方案二:采用语音芯片控制喇叭,实现动听的钢琴声。
主要优点是声音动听、音调准确、编程简单。
缺点是成本比方案一高,占用单片机IO口多,对声音的控制只能通过语音芯片来控制,控制响应速度、声音音域、声音延时等收到语音芯片的性能限制。
华中科技大学电子与信息工程系2013年TI杯电子设计大赛项目总结报告项目名称:基于MSP430F5529的智能小车设计团队成员: 通信工程通信工程通信工程指导教师:2013 年7月3日课题名称:智能小车自动控制系统【摘要】本次课程设计以MSP430超低功耗单片机系列MSP430F5529为主控制器,附加电机、电池、传感控制模块等,完成二驱小车自由运动、检测黑白线实现沿轨道自动运行、能够避开障碍物、无线控制等功能,F5529的I/O口丰富,使得各个功能模块之间信息交流快捷方便。
在机械结构上,我们选购用一个万用轮代替两个前轮的小车,大幅度提高了小车的灵敏度。
利用单片机产生PWM波,控制小车速度,选用L298N驱动芯片驱动电路,使用三路红外对接管检测黑白线,使用一个超声波实现测距壁障功能,使小车能够自动左转避开障碍物,使用无线控制模块,可实时控制小车运动。
基于可靠的硬件设计和更加优化的软件算法,在实现本课设基本要求的基础上,可实现部分扩展功能。
【关键词】:MSP430F5529循迹无线控制超声波测距壁障ﻬAbstract This cu rriculum projectuses MSP430F5529, in the series of MSP430 ultra low power single chip microcomputer, as its main controller. In addition, the realization of the controller’s function can not leave motor, battery, sensing controltemplate and so on, for example, free movementof the two driv evehicle, and automatic operation along runway bytesti ng black and white lines, avoiding obstacles, wireless operatio nandother functions. The quick andeasy information exchanging among each functional template has tothank to the abundance of I/O of F5529. On mechanicalstructure, two front wheels of the mini car are replaced by a universal wheel, so asto improve its sensitivity by large margin. PWM is used to control motor and single chip microcomputerto make PWM wave, in orderto control its speed. The car can s top and turn left to avoid obstacles because L298N driving chip drives circuit, three infrared ray onpipes is used to test black and white lines, and an ultrasonic templateis chosen to realize ranging barrier function. With wireless operating template, movement of the mini car canreach real-timecontrol.Besidesfinishing basic requirement of this curriculum project, some broadening functi ons can also be achieved based on reliable hardware design and bettersoftware algorithm.Key words: MSP430F5529 tracking wireless control ultrasonic wav erangingcounterguardﻩﻬ目录1 概述 (3)2 设计目标 (3)3 团队组成与任务分工 (4)4 方案论证........................................................................44.1电机驱动模块.............................................................................44.2 循迹模块...................................................................................5 4.3无线模块...................................................................................5 4.4 测距壁障模块.. (5)5 系统总体设计 (7)5.1 总体设计思路...........................................................................7 5.2主要器件选择...........................................................................75.3主要元器件清单 (8)7 系统各模块设计与实现.....................................................157.1电机驱动模块.. (15)7.2循迹模块.................................................................................16 7.3 无线模块 (16)7.4超声波测距壁障模块………………………………………………………...179心得与总结 (2)610致谢 (27)11 参考文献……………………………………………………………2712 附录……………………………………………….………………...271.概述随着控制技术及计算机技术的发展,智能车系统将在未来工业生产和日常生活中扮演重要的角色。
简易智能小车摘要:本系统基于自动控制原理,以MSP430为控制核心,用红外传感器、光敏三极管、霍尔传感器、接近开关之间相互配合,实现了小车的智能化,小车完成了自动寻迹、避障、寻光入库、计时、铁片检测、行程测量的功能。
本系统采用液晶LCD12864显示数据,良好的人机交流界面,显示小车行程的时间、铁片中心线离起始线的距离和铁片的个数。
整个系统控制灵活,反应灵敏。
关键词:MSP430 传感器 LCD12864目录一、方案论证与比较 (3)1、题目任务要求及相关指标的分析 (3)2、方案的比较与选择 (3)(1)控制单元的选择 (3)(2)直流电机驱动电路的选择 (3)(3)轨迹探测模块选择 (3)(4)金属片的探测 (3)(5)路程测量方案的选择 (4)(6)避障方案的选择 (4)(7)小车寻光方案的选择 (4)(8)电源的选择 (4)(9)刹车机构功能方案比较 (5)二、系统总体设计方案及实现方框图 (5)1、系统总体设计方案 (5)2、系统实现框图 (5)三、理论分析与计算 (5)1、铁片中心线距离的测量 (5)2、小车行程时间的测量 (5)四、主要功能电路设计 (6)1、小车循迹模块 (6)2、小车检测铁片模块 (6)3、小车测距模块 (6)4、小车避障模块 (6)5、小车寻光模块 (6)6、直流电机驱动模块 (7)五、系统软件的设计 (8)六、测试量数据与分析 (8)1、测量数据 (8)2、数据分析 (8)参考文献 (8)一、方案论证与比较1.题目任务要求及相关指标的分析题目要求小车按照规定的跑道行驶,同时检测在跑道下的铁片,在检测到最后一块铁片时小车会有连续的声光显示;后又可以准确的避开障碍,而且不与障碍物接触;最后,在光源的引导下,进入车库。
智能小车有显示功能,可以显示检测到铁片的数量,金属片距起点的距离,行驶的总时间。
整个行驶过程中的总时间不大于90秒,小车在行驶90秒后会自动停车。
2. 方案的比较与选择(1)控制单元的选择方案一:利用单片机与FPGA配合使用。
科技与创新|Science and Technology & Innovation2024年 第04期DOI :10.15913/ki.kjycx.2024.04.014基于MSP430的智能小车跟随行驶系统*董锦衡,蔡欣怡,邓俊逸,朱建红,袁银龙(南通大学电气工程学院,江苏 南通 226019)摘 要:以MSP430F5529LP 单片机为控制芯片,通过TCRT5000红外传感器和HC-SRF05超声波传感器实现路径识别和车距识别,结合HC-05蓝牙模块完成数据通信。
由信号检测结合PID (比例-积分-微分)算法提升小车的调速性能及跟随性能,实现速度和距离双闭环控制,并在循迹方案设计时引入模糊规则控制器提升循迹稳定性。
实物调试时,从车快速响应主车信号,2个车车速控制误差平均值控制在10%以内,主从车距误差控制在6 cm 以内,实现了跟踪及超车行驶任务。
关键词:MSP430;PID ;超声波测距;红外循迹中图分类号:TP273 文献标志码:A 文章编号:2095-6835(2024)04-0056-03——————————————————————————*[基金项目]南通市科技局应用研究项目(编号:JC2020148)作为机器人领域的一个重要分支[1],智能小车一直以来都是科研工作者研究的热点[2]。
随着人工智能技术的快速发展,小车的智能化成为趋势[3],自动跟随小车也逐渐进入人们的视野。
对跟随小车的研究不仅可以推动AGV (Automatic Guided Vehicle ,自动导引车)系统的完善,还对无人驾驶系统的模拟实验有着重要意义。
为此,本文以MSP430为主控芯片,建立了适用于不同路径的智能小车跟随行驶系统,给出了2个小车的通信方案和模糊PID 循迹控制策略,介绍了增量式PID 控制器调节车速、车距的方法。
在地图(如图1所示)上进行测试时,2个车能够在保持车距的同时沿外圈黑线循迹行驶,并根据工作模式的不同准确完成追逐前车、超越前车的任务。
智能循迹小车2016年TI杯大学生电子设计竞赛自动循迹小车(C题)摘要本次设计的智能循迹小车是以单片机MSP430F5529为主控制器运用TI 公司提供LDC1314和LDC1000电感数字装换器作为循迹传感器与速度监测模块。
将检测数据传回单片机进行处理,同时,用单片机产生PWM波来控制小车的行进速度,并实时控制小车的行进状态。
另外,在小车上还扩展了LCD作为人机交互界面,以便于实时了解小车各个监测传感器的状态机小车的实时数据,由于本次设计的是自动循迹小车,整个任务过程无需人工的任何干预,故而没有进行键盘及遥控等的人工操作设备。
用多路传感器的实时监测和算法的紧密配合来保证小车的顺畅完成任务。
报告是以小车的总体设计为主要线索,包括小车的设计分析及发案论证、小车的软件设计、小车的硬件设计、以及总体的设计流程。
共分为六章xxx小结。
其中第一章主要是对小车总体设计及各个设计方案进行了论证,第二章是对小车硬件部分的设计做了详细的介绍,第三章重点叙述了软件的设计及流程和各种相关的算法,第四章介绍了我们小车设计的开发流程,第五章叙述了我们在设计过程中遇到的问题和解决方法,并对本次的设计活动做了总结报告和在本次活动中的心得。
The design of intelligent tracking car based on MCU msp430f5529 based controller using Ti provides LDC1314 and LDC1000 digital inductance loading converter as the tracking sensor and speed monitoring module. Will the detection data returned microcontroller for processing, at the same time, MCU to produce PWM waves to control the moving speed of the car, and real-time control of the car moving state. Also in the car also expanded the LCD as the man-machine interface, in order to facilitate the real-time data of real-time understanding of the car each monitoring sensor state machine car, because the design of the automatic vehicle tracking, the whole process of task without any manual intervention is required, and therefore no rowkeyboard and remote control and manual operation of the equipment. To ensure the smooth completion of the vehicle, the real-time monitoring and algorithm of the multi-channel sensor are closely combined to ensure the smooth completion of the task.The report is in the overall design of the car as the main clues, including the hardware design of the software design of the car design analysis and demonstration of incidence, the car, the car, and the overall design process. The total is divided into six chapters XXX summary. The first chapter is mainly the car overall design and various design schemes are discussed. Chapter two is, a detailed introduction of the car hardware design, in the third chapter, the author describesthe software design and the various processes and related algorithms, chapter four introducesthe development process of our car design, the fifth chapter describes the problems we encountered in the design process and the methods to solve, and of the design activities do the summary report and experience in the event.目录第一章:方案设计与分析 (8)一、设计要求 (8)二、总体设计 (9)三、方案论证 (10)1. 小车主体设计方案 (10)2. 电机设计方案 (11)3. 传感器使用设计方案 (12)4. 显示模块设计方案 (13)5. 电源设计方案 (14)四、单片机资源分配 (14)五、电源分配 (16)第二章:智能循迹小车硬件设计 (17)一、机械设计 (17)1.小车模块分布 (17)2.小车传感器位置排布 (18)3.测速计程 (19)4.小车骨架设计 (20)二、电路设计 (21)1. 驱动 (21)2. LDC1000 (23)3. 1602液晶显示 (24)4. 蜂鸣器 (25)5. 单片机 (25)三、元件清单 (27)元件 (27)数量 (27)元件 (27)数量 (27)元件 (27)数量 (27)第三章:智能循迹小车软件设计 (28)第四章:总结与心得 (31)一、开发与调试 (31)1.总体方案论证和确立 (31)2.各分立模块调试 (32)二、典型问题举例 (32)1.电感切割铁线产生电流 (32)2. (32)三、总结与展望 (33)第一章:方案设计与分析一、设计要求本次比赛要求任务是,在规定的平面自动按顺时针方向循迹前进。
模块组成。
各模块的系统框图如图1所示。
图1系统框图1.1单片机模块方案一:AT89C51单片机。
控制简单,其运算速度慢,片内资源很少,存储器容量也小,难以作较复杂的程序设计和实现复杂的算法。
方案二:MSP430单片机。
超低功耗,存储量大,外部扩展能力强控制功能强。
16位指令集处理器,14个双向I/O口,每个I/O口均可作为中断源。
基于以上分析,拟选用方案二。
1.2LDC1000模块方案一:采用自绕线圈进行检测。
理论上,当线圈电感增大时,测距离应增加。
但经实测,该方法对线圈及其与之匹配的电容要求极高,计算困难,所以无明显效果。
方案二:采用LDC1000模块自带PCB线圈。
经实验,通过合理设置模块寄存器值,可以有效检测3cm距离的金属。
但其有效检测面积较小,只能检测到线圈正对的金属,可以通过增大检测时的扫描密度解决。
综上所述,我们采用LDC1000模块自带PCB线圈,所以选择方案二1.3电机驱动模块图2LDC1000探头电路循迹流程图如图3所示。
图3循迹流程图通过对本设计要求的技术指标进行分析,能较好地完成以下几个在探测区域内某处任意位置放置一枚第五套角硬币边缘紧贴铁丝。
小车从起点进入测试区域,当LDC1000硬币时小车停止,同时蜂鸣器发出报警信号。
在4min内小车完成寻迹,结束测试。
打破了以往金属探测只局限于利用电磁感应的惯例LDC1000作为探头,使该系统具有检测精度高、性能稳定。
【参考文献】张淑英.传感器原理及应用[M].3版.天津天津大学出版社电子线路设计.实验.测试[M].2版.华中科技大学出版社应启衍,杨为理.信号与系统[M].2版.北京高等教育出版社单片机原理及接口技术[M].简明修订版.北京北京航空航天出版社数字系统设计Verilog实现[M].北京高等教育出版社. All Rights Reserved.Science&Technology Vision科技视界。
智能循迹小车报告摘要:本设计由寻迹信息采集电路,电机驱动电路以及MCU 控制模块四大部分构成。
MCU 控制模块是本设计的核心部分,该部分以一片TI 公司的MSP430F149 为控制中心,实现对各个模块的控制。
寻迹信息采集部分以反射式光电传感器和比较器组成,将采集到的数据处理后送至单片机。
电机由以L298N 为核心部件的电路驱动。
该小车具有自动寻迹起始点检测功能。
基于稳定的硬件电路设计以及精确可靠的软件算法,小车能够实现预期功能。
关键词:MSP430,L298N,寻迹。
一、循迹信息采集模块小车在前进时,要实现寻迹功能,可以采用高灵敏度的反射式光电传感器对地面进行扫描,再将采集到的数据经过比较器后输出高低电平,最后送入单片机处理。
经过对一只ST188 的测试,发现ST188 接收管输出端的低电平输出大致为0.78V,高电平的输出大致为2.85V,经过比较器后输出低电平为0.03V,高电平为3.26V,能够被单片机所识别。
小车在白色地面行驶时,红外发射管发出的红外信号被反射,接收管收到信号后,输出端为低电平。
而当红外信号遇到黑色导轨时,红外信号被吸收,接收管不能接收到信号,输出端为高电平。
单片机通过采集每个红外接收管的输出端电压,便可以检测出轨道的位置,从而控制小车的转向,使小车一直沿轨道前进。
ST188采用高发射功率红外光电二极管和高灵敏度光电晶体管组成。
检测距离为4-13mm。
本小车一共采用了5只ST188光电对管,一只位于黑线上方,两只位于黑线左右用于直走微调,最左最右端两只用于转弯。
我们在光电对管的发射端串联的一个电位器来调节发射管的电压,以便在不同的环境下进行调节。
循迹模块原理如图所示:注意:在实际制作中,光电对管应尽量靠近地面,以减少干扰。
二、电压比较模块电压比较模块我们采用了3块LM393芯片,一块LM393芯片上有两个电压比较模块,我们只用到了其中的5个电压比较。
我们在LM393的同向输入给定一个参考电压,与在端光电对管的接收端的电压进行比较,若接收端电压比参考电压大,则输出一个,反之输出一个。
第30卷第6期孝感学院学报V OL.30 NO.6 2010年11月JOURNAL OF XIAOGAN UNIVERSITY N O V.2010基于M SP430单片机的智能小车设计与实现陈晶晶(龙岩学院物理与机电工程学院,福建龙岩364012)摘 要:介绍了一种以M SP430单片机作为核心控制单元的智能小车的设计方法。
由安装在车头和轮胎上的传感器负责采集各种信号,并将采集到的电平信号传给单片机,单片机经过处理后控制电机,完成小车的前进,转向和路程显示功能。
给出了小车系统的硬件和软件设计方法,经过实际测试,能够完成所有功能。
该设计可用在自动停车系统和工厂的运料车上。
关键词:智能小车;传感器;单片机;路面检测中图分类号:T P24 文献标识码:A 文章编号:1671-2544(2010)06-0055-03随着计算机技术、信息技术和人工智能技术的飞速发展,智能车的使用越来越普及,相对于传统的汽车而言,智能小车有着更好的安全性、机动性和广泛的适用性[1]。
与此同时,科学技术和生产力的发展也使智能车在探险、排爆以及工厂运料等领域发挥的作用逐渐增大。
因此,智能车的研制问题也成为一个热门。
本文着重介绍了以msp430单片机作为核心控制单元,通过处理外部传感器传回的数据,自动实现巡线、避障等功能。
1 方案设计本智能车采用T I公司的msp430单片机作为唯一的核心控制单元,该系列单片机具有功耗低,功能强大,接口丰富等优点[2]。
通过此芯片设计出的智能小车具有省电和抗外部干扰强的优点,可以长时间在恶劣环境下工作。
小车系统一共由电源模块、电机驱动模块、路面探测模块和路程计算模块组成。
电源模块采用灵活方便的单电源供电模式,为所有模块供电。
路面探测模块使用反射式红外传感器负责采集各种路面信息,并将采集到的信号反馈给核心控制单元,核心控制单元对采集到的信号进行处理和判别,产生不同占空比的PWM波形分别控制转向电机、前进与后退电机。
基于MSP430F5529主控芯片的可寻轨小车发布时间:2021-06-30T02:50:02.693Z 来源:《现代电信科技》2021年第4期作者:孙婉怡1 牛建邦1 席莹莹1 孙婉欣2 [导读] 可寻轨小车用MSP430F5529最小系统、红外反射传感器、电机驱动模块、电机以及电池组成。
MSP430F5529最小系统为该系统的核心器件,为了使小车正常行驶,系统外设增加电机以及电机驱动模块,同时为了使小车能够正常稳定行驶,增加了PID算法。
(1.佳木斯大学信息电子技术学院黑龙江佳木斯 154007;2.哈尔滨商业大学药学院黑龙江哈尔滨 150000)摘要:可寻轨小车由MSP430F5529最小系统、红外反射传感器、电机驱动模块、等组成。
以MSP430F5529最小系统为该系统的核心器件,并使用PID算法对速度进行了调控。
应用红外传感器对轨道进行检测,实现小车的直线行驶和转弯等功能。
小车启动后主控器发出直线行驶信号,使小车直线行驶,当红外传感器发生偏转时对其进行调整。
关键词:MSP430F5529最小系统;红外反射传感器;PID算法Design of trackable car based on msp430F55291.College of Information Science & Electronic Technique,Jiamusi University2. Pharmacy,Harbin University of CommerceAbstract:The trackable trolley is composed of msp430f5529 minimum system,infrared reflection sensor,motor drive module,etc. Msp430f5529 chip is used as the core device of the system,and PID algorithm is used to control the speed. The infrared sensor is used to detect the track and realize the functions of straight-line driving and turning of the car. After the car starts,the main controller sends out a straight-line driving signal to make the car drive in a straight line. When the infrared sensor deflects,it is adjusted.Keywords:Msp430f5529 chip Infrared reflection sensing PID algorithm引言可寻轨小车用MSP430F5529最小系统、红外反射传感器、电机驱动模块、电机以及电池组成。