Halcon标定板规格
- 格式:doc
- 大小:19.00 KB
- 文档页数:2
Halcon标定板
什么是Halcon
Halcon是来自德国的一款图像处理软件,在世界范围内广泛使用的机器视觉软件。
是公认的、具有最佳效果的一种图像处理软件。
它源自学术界,有别于市面上一般的商用软件包,事实上这一套软件是由一千多个各自独立的函数,以及底层的数据管理核心构成。
其中包含了各类滤波,色彩以及几何、数学转换,型态学计算分析、校正,分类辨识。
halcon的应用范围几乎没有限制,涵盖医学,遥感探测,监控,到工业上的各类自动化检测。
促成了高科技业,电子业产能的大幅提升。
也是机器视觉用的最多的一种软件。
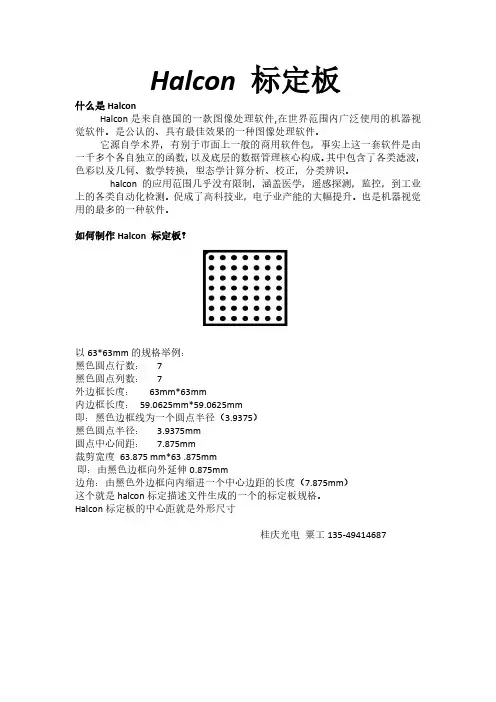
如何制作Halcon标定板?
以63*63mm的规格举例:
黑色圆点行数:7
黑色圆点列数:7
外边框长度:63mm*63mm
内边框长度:59.0625mm*59.0625mm
即:黑色边框线为一个圆点半径(3.9375)
黑色圆点半径: 3.9375mm
圆点中心间距:7.875mm
裁剪宽度63.875mm*63.875mm
即:由黑色边框向外延伸0.875mm
边角:由黑色外边框向内缩进一个中心边距的长度(7.875mm)
这个就是halcon标定描述文件生成的一个的标定板规格。
Halcon标定板的中心距就是外形尺寸
桂庆光电粟工135-49414687。
Halcon单相机标定和测量示例相机标定有很多方式:九点标定法、棋盘格标定法、圆形阵列标定法;本次采用圆形阵列标定法。
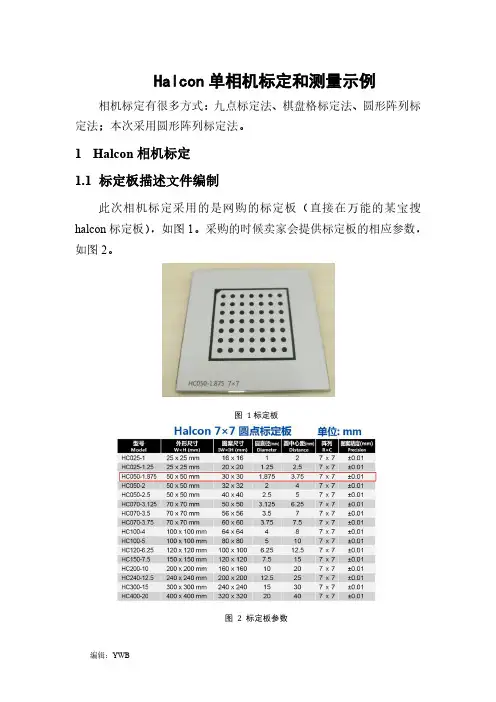
1Halcon相机标定1.1标定板描述文件编制此次相机标定采用的是网购的标定板(直接在万能的某宝搜halcon标定板),如图1。
采购的时候卖家会提供标定板的相应参数,如图2。
图1标定板图 2 标定板参数用halcon标定助手标定的时候需要用到标定板的描述文件,此文件可以用gen_caltab算子自己编制。
如下为函数说明:gen_caltab( : : XNum, YNum, MarkDist, DiameterRatio, CalPlateDescr, CalPlatePSFile : ) 函数说明:创建一个标定文件和相应的脚本文件。
函数参数:Xnum:输入X方向标记(圆点)的数量,Xnum>1;Ynum:输入Y方向标记(圆点)的数量,Ynum>1;MarkDist:标记圆圆心间距离,单位“m”;(我看过一个资料翻译为标记点大小,差点被坑死)DiameterRatio:两标记点距离和标记直径的比值,默认:0.5。
0<DiameterRatio<1.0;CalPlateDescr:输入要保存的标定文件(此文件保存路径在算子窗口可更改),默认值: 'caltab.descr',参考: 'caltab.descr', 'caltab_100mm.descr', 'caltab_10mm.descr', 'caltab_200mm.descr', 'caltab_30mm.descr';CalPlatePSFile :标定板图像文件的文件路径(此文件保存路径在算子窗口可更改),默认: 'caltab.ps',后缀:ps。
此算子“XNum, YNum, MarkDist, DiameterRatio”这四个参数根据图2所示的标定板参数设置。
halcon标定板坐标提取
Halcon标定板坐标提取通常涉及以下几个步骤:
1. 选择标定板:在Halcon软件中,首先需要选择标定板的类型和尺寸。
可以选择常用的棋盘格标定板或者其他形状的标定板。
2. 拍摄标定板图像:使用相机拍摄包含标定板的图像。
确保图像质量良好,标定板清晰可见。
3. 导入图像:在Halcon软件中导入标定板图像。
4. 检测标定板角点:使用Halcon的角点检测算法,对标定板图像进行处理,检测出标定板的角点。
5. 提取角点坐标:通过Halcon提供的函数或算法,将检测到的角点坐标提取出来。
6. 坐标转换:根据实际的应用需求,对提取到的角点坐标进行坐标转换,例如图像坐标转换为世界坐标。
7. 标定板坐标提取:根据标定板的尺寸和角点坐标,计算出标定板的坐标。
需要注意的是,Halcon提供了丰富的函数和算法来支持标定板坐标的提取,具体的实现方法可以根据实际情况和需求进行选择和调整。
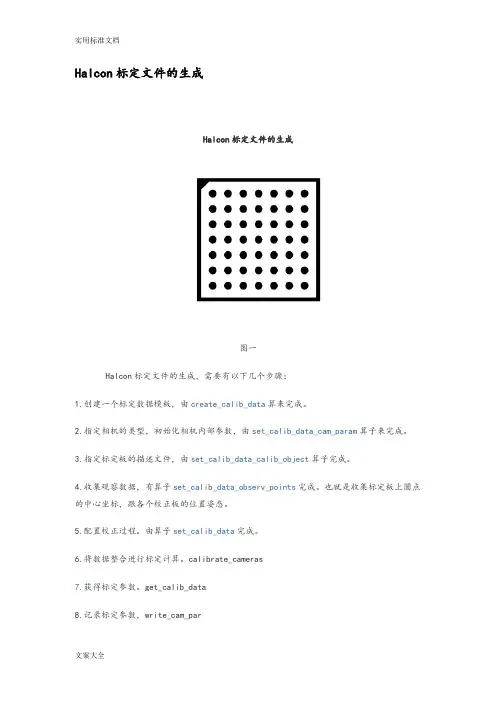
Halcon标定文件的生成Halcon标定文件的生成图一Halcon标定文件的生成,需要有以下几个步骤:1.创建一个标定数据模板,由create_calib_data算来完成。
2.指定相机的类型,初始化相机内部参数,由set_calib_data_cam_param算子来完成。
3.指定标定板的描述文件,由set_calib_data_calib_object算子完成。
4.收集观察数据,有算子set_calib_data_observ_points完成。
也就是收集标定板上圆点的中心坐标,跟各个校正板的位置姿态。
5.配置校正过程。
由算子set_calib_data完成。
6.将数据整合进行标定计算。
calibrate_cameras7.获得标定参数。
get_calib_data8.记录标定参数,write_cam_parStartCamPar :=[0.016, 0, 0.0000074, 0.0000074, 326, 247, 652,494]解释一下这个数组的意思。
面阵相机有14或18个参数(根据想相机的畸变模式),对于线阵相机有17个参数。
这些参数可以分开为内部相机参数、外部相机参数。
面阵相机(division模式):Focus(焦距):远焦镜头镜头焦距的长度Kappa:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高面阵相机(polynomia模式):Focus(焦距):远焦镜头镜头焦距的长度K1, K2, K3, P1,P2:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高线阵相机不做具体介绍Halcon标定板规格2011-12-23 12:56 68人阅读评论(1) 收藏举报图一:30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm 边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度: 46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度: 51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm 边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度: 56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm边角:由黑色外边框向内缩进一个中心边距的长度Halcon如何制作标定板分类:Halcon 2011-12-23 12:51 151人阅读评论(2) 收藏举报图1上图即为我自行制作的标定板的图样。
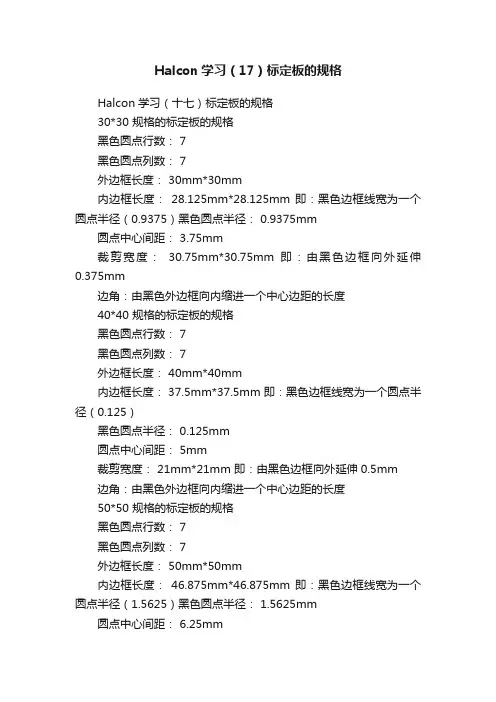
Halcon学习(17)标定板的规格Halcon学习(十七)标定板的规格30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度:28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度:30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度:46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度:51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度:56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm 边角:由黑色外边框向内缩进一个中心边距的长度。
基于HALCON软件的摄像机标定的研究报告摄像机标定是计算机视觉中最基础而又最重要的问题之一,通过标定可以实现摄像机畸变矫正、三维重建、轨迹跟踪等诸多操作。
HALCON是一款流行的计算机视觉和机器视觉开发工具,其自带的摄像机标定模块可以实现对相机内外部参数的计算和优化,并可生成标定文件以供后续操作使用。
本文将介绍HALCON软件的摄像机标定原理和流程,并使用实验数据进行验证。
一、HALCON摄像机标定原理HALCON摄像机标定基于Perspective Projection Model(透视投影模型),即传统的针孔相机模型。
根据这个模型,每个点在图像平面上的位置可以用其在三维空间中的坐标(x,y,z)和摄像机参数(focal length、principal point、radial distortion、tangential distortion等)计算得出。
因此,摄像机标定的主要目的是测量这些摄像机参数,以实现对图像的畸变矫正。
二、HALCON摄像机标定流程HALCON摄像机标定流程包含以下几个步骤:1. 准备标定板:使用一张精确已知的标定板(如棋盘格)作为标定物体。
标定板上应该有一定数量的格子,并且格线应该较为清晰,以便识别。
2. 拍摄标定板照片:摄像机需要从至少两个不同角度拍摄标定板的照片,以获得足够的信息来计算摄像机参数。
拍摄时应注意保持标定板与摄像机位置、光照等条件的一致性。
3. 提取标定板角点:使用HALCON提供的Corner Detection(角点检测)算法,对标定板照片中的角点进行提取。
提取的角点应该较为准确,并尽可能地覆盖整个标定板。
4. 生成初始参数:对提取的角点进行3D-to-2D转换,生成摄像机的初始内外部参数。
这些参数可以作为优化算法的初始值。
5. 优化参数:使用HALCON自带的Optimize Calibration Object Parameters(标定参数优化)算法,对摄像机内外部参数进行优化。

使用Halcon助手来制作标定数据/hust1900/article/details/86877841打开halcon标定助手2.标定任务一栏,选择位姿和所有参数(此为默认情况);标定板一栏,则点击文件浏览,\clib\ 选择halcon自带的一个标定板文件(也可以自作一个标定板文件,使用gen_caltab算子);相机模型一般都是面扫面相机(参考书上说多使用多项式相机),线扫描相机一般用于运动测量(不确定这里),其他参数根据具体自行设置3.标定环节。
该环节主要是采集标定板在视野范围内不同地方的多个图像,从而得到更为精确的摄像机外部参数。
图像源是用来获得标定板图像的,有两种方式:方式一,“图像文件”,则是已经采集好各种标定板位置图像,然后直接加载进去(注意,存放文件的路径不能有中文,文件夹也不能用中文);方式二,”图像助手“可以通过相机采集各种位置图像。
注意:拖动标定板,使得采集到的标定板位置能够填充整个视野,这样得到的摄像机数据才更精确。
(一般需要采集至少十幅图,包括各个角落,标定板倾斜等等位置图像)同时实时调整下方的标定板读取参数,来获得理想的图当加载完成后,点击标定,即可完成摄像机数据计算。
4,结果一栏。
可以清楚看到标定板的标定状态,摄像机参数,此为摄像机内参,在相机焦距,镜头等均不动的情况下,这些数据时不变的。
点击右边的”保存“,可以保存当前状态下摄像机的内部参数(*.cal文件)。
当使用当前状态下的相机去标定时候,可以直接读取这个文件,从而获得相机内参。
而摄像机位姿一栏,则描述的是摄像机的外部参数(可以保存为*.dat文件),即为相机坐标系下的图像位置和世界坐标系下的位置之间的映射关系。
当不改变相机状态,直接用来标定时候,也可以直接使用当前的外参来标定摄像机参数一栏:摄像机参数为内参,描述的是相机坐标系和成像坐标系之间的对应关系。
各参数的意义:像素的宽和高表示成像平面得到的像素的米制单位焦距:成像平面到成像中心的距离Kappa(即上图的K1,K2,K3,P1,P2):畸变系数。
Halcon学习(十七)标定板的规格30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度: 46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度: 51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度: 56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm边角:由黑色外边框向内缩进一个中心边距的长度。

利用Halcon进行单目标定楼主#更多•只看楼主倒序阅读发布于:2020-01-23 10:12摄像机标定之前,首先要确定相机和镜头的参数,参考对应说明书,查找IMAGING SOUR CE 31BU03相机的参数如下:分辨率1024*768;格式1/3’’;像素尺寸,水平4.65um,垂直4.65um;两个镜头是computar工业自动化镜头,其参数分别是:①焦距5mm,F1.4,尺寸1/2’’,②焦距12mm,F1.4,尺寸2/3’’。
相机和镜头参数作为标定过程中算子StartCa mPar的初值。
标定过程首先,创建标定数据模型,使用算子create_calib_data,实例中为create_calib_data ('cali bration_object', 1, 1, CalibDataID),该算子是为了创建标定数据模型,即标定的数据将存放于CalibDataID中。
其次,设定摄像机的初始化参数,即第一段所提及。
算子为set_calib_data_cam_param (C alibDataID, 0, 'area_scan_division', StartCamPar)。
第三步,描述标定板,,这里标定板名称CaltabName有两种途径获取,使用算子set_calib_data_calib_object (CalibDataID, 0,CaltabName)。
一种途径是直接调用Halcon自带的描述文件(.descr),另一种是通过算子gen_caltab自制标定板,产生描述文件。
标定板描述文件中的标定板信息必须与标定过程中使用的标定板规格、尺寸一致。
第四步,开始标定。
其中又分为两部分,一是找到标定板,二是找到标定点及其位置。
使用算子为find_caltab (Image, Caltab, CaltabName, SizeGauss,MarkThresh, MinDiamMarks)和find_marks_and_pose (Image, Caltab,CaltabName, StartCamPar, StartThresh, Delta Thresh, MinThresh, Alpha,MinContLength, MaxDiamMarks, RCoord, CCoord, StartPose)。
使用halcon相机标定初始值确定富士伺服富士伺服初始参数是0.0195,注意halcon里单位是m k是畸变系数,可以初始为0 sx和sy是相邻像元的水平和垂直距离,1/4"可以查得分别宽和高尺寸是3.2和2.4mm,用320×240去除,得到sx和sy分别是0.01mm,那么应该初始为sx=1.0e-005和sy=1.0e-005,Cx和Cy分别是图像中心点行和列坐标,可以初始化为160和120,最后两个参数是ImageWidth和ImageHeight直接就用320和240。
Halcon 摄像机标定流程摄像机分两种,一种是面扫描摄像机(Area Scan Camera),一种是线扫描摄像机(Line Scan Camera)。
准确来说,叫摄像机系统比较正确。
所谓的面扫描摄像系统是指可以通过单纯曝光取得面积影像,而线扫描摄像机,必须利用运动速度才能取得影像。
两种不同的摄像系统由于成像的过程有区别,所以标定的过程也有区别,这里仅讨论面扫描摄像系统。
流程如下:1、初始摄像机参数:startCamPar:=[f,k,Sx,Sy,Cx,Cy,NumCol,NumRow]f 焦距k 初始为0.0Sx 两个相邻像素点的水平距离Sy 两个相邻像素点的垂直距离Cx、Cy 图像中心点的位置NumCol NumRow图像长和宽2、caltab_points读取标定板描述文件里面描述的点到X[],Y[],z[],描述文件由gen_caltab生成。
3、fin_caltab找到标定板的位置4、find_marks_and_pose 输出标定点的位置和外参startpose5、camera_calibration输出内参和所有外部参数到第五步时,工作已经完成了一半,计算出各个参数后可以用map_image来还原形变的图像或者用坐标转换参数将坐标转换到世界坐标中。
详解Halcon相机标定相机标定简介首先镜头有畸变,也就是说照出的图像与实际不符产生了形变。
即使工业镜头也是有千分之几的畸变率的。
上个图告诉大家畸变这个图里,第一个图就是我们相机下的真实的形状,后边两个就是照出来有畸变的图片。
其次镜头与相机无论你的机械结构精度多高,也不容易或者说没办法将相机安装的特别正,那相机安装不正也是会导致误差的。
大家想知道具体数学模型的话可以搜一下相机标定的理论方面的知识,我侧重怎么做。
标定就是把上述两个东西转化成正常的。
无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
深度说明1、相机标定参数介绍内参:确定摄像机从三维空间到二维空间的投影关系。
针孔相机(FA镜头相机)模型为6个参数(f,kSx,Sy,Cx,Cy);远心镜头相机模型为5个参数(f,Sx,Sy,Cx,Cy);线阵相机为11个参数(f,k,Sx,Sy,Cx,Cy,Width,Highth,Vx,Vy,Vz)。
其中:f为焦距;k表示径向畸变量级。
如果k为负值,畸变为桶形畸变,如果为正值,那么畸变为枕形畸变。
Sx,Sy是缩放比例因子。
对于针孔摄像机(FA镜头)表示图像传感器水平和垂直方向上相邻像素之间的距离,初始值与真实值越接近计算速度越快。
对于远心摄像机模型,表示像素在世界坐标系中的尺寸。
Cx,Cy是图像的主点,对于针孔相机,这个点是投影中心在成像平面上的垂直投影,同时也是径向畸变的中心。
对于远心摄像机模型,只表示畸变的中心。
Vx,Vy,Vz:线阵相机必须与被拍摄物体之间有相对移动才能拍摄到一幅有用的图像。
这是运动向量。
Sx,Sy对于线阵相机是相邻像元的水平和垂直距离。
2、标定板详细介绍问题1:halcon是否只能使用halcon专用的标定板?halcon提供了简便、精准的标定算子与标定助手,这在实际使用中极大地方便了使用者在halcon中有两种标定方式:halcon自带例程中出现的,用halcon定义的标定板,如下图:用户自定义标定板,用户可以制作任何形状、形式的标定板,如下图:所以,halcon并非只能使用专用标定板,也可以使用自定义标定板就可以进行标定。
相机标定1 相机标定基本原理1.1 相机成像模型目前大多数相机模型都是基于针孔成像原理建立的,因为针孔成像原理简单,并且能满足建模的要求。
除此之外还有基于应用歪斜光线追踪法和近轴光线追踪法的成像模型[1]。
针孔成像虽然已经展示出了相机的成像原理,但是由于针孔成像是理想的物理模型,没有考虑相机本身的尺寸、镜头与相机轴心的偏斜等因素的影响,因此精度很低,不能满足工业机器视觉的要求。
为了使相机模型能高精度的反应相机的实际成像过程,需要再针孔成像模型的基础上考虑镜头畸变等的因素。
图1 针孔成像基于针孔成像原理建立的相机的成像模型,如下图所示。
在相机的成像模型中,包含有几个坐标系分别是世界坐标系、相机坐标系、图像坐标系,相机的成像过程的数学模型就是目标点在这几个坐标系中的转化过程。
图2 针孔成像模型(1)世界坐标系(X w,Y w,Z w),就是现实坐标系,是实际物体在现实世界中的数学描述,是一个三维的坐标空间。
(2)摄像机坐标系(X c, Y c),以针孔相机模型的聚焦中心为原点,以摄像机光学轴线为Z c轴(3)图像坐标系:分为图像像素坐标系和图像物理坐标系为了便于数学描述将图像平面移动到针孔与世界坐标系之间。
如下图所示。
图3 将相机平面移至针孔与目标物体之间后的模型1.2 坐标系间转换从世界坐标系到相机坐标系:P(X c ,Y c ,Z c )=R(α,β,γ)∗P(X w ,Y w ,Z w )+T每一个世界坐标的对象都可以通过旋转和平移转移到相机坐标系上。
将目标点旋转θ角度,等价于将坐标系方向旋转θ。
如下图所示,是二维坐标的旋转变换,对于三维坐标而言,旋转中绕某一个轴旋转,原理实际与二维坐标旋转相同。
如果,世界坐标分别绕X ,Y 和Z 轴旋转α,β,γ,那么旋转矩阵分别为R (α),R (β),R (γ)图4 坐标旋转原理R (α)=[1000cosα−sinα0sinαcosα] (1-1) R (β)=[cosβ0sinβ010−sinβ0cosβ] (1-2)R (γ)=[cosγsinγ0−sinγcosγ0001] (1-3)总的旋转矩阵就是三者的乘积:R(α,β,γ)=R (α)∗R (β)∗R(γ)平移矩阵T =(t x ,t y ,t z ),t x ,t y ,t z 是世界坐标系原点与摄相机坐标系原点之间的差值。
halcon不规则点的标定1. 引言在计算机视觉领域,相机标定是一个常见且关键的问题。
在实际应用中,我们常常需要准确地计算出图片中的物体在三维空间中的位置和姿态信息。
然而,由于相机镜头的畸变以及多种误差的存在,仅仅依靠单张图片是无法准确还原物体的真实位置和姿态的。
为了解决这个问题,我们需要对相机进行标定。
在本文中,我将着重讨论一种特殊情况下的相机标定问题,即halcon不规则点的标定。
2. 概述不规则点标定是指使用不规则形状的标定板进行相机标定的一种方法。
相比于常规的纸质标定板,不规则点标定板更加有利于提升标定的准确性和鲁棒性。
halcon是一个强大的机器视觉库,提供了不规则点标定的相关功能。
3. 不规则点标定的原理不规则点标定的原理基于多视角几何理论和标定板的形状信息。
不规则点标定板通常是由一些特殊设计的点组成的,这些点通常具有不同的形状和颜色。
在使用halcon进行不规则点标定时,我们需要将标定板放置在不同的位置和姿态下,通过拍摄多张图像并提取出标定板上的点的坐标信息。
通过这些坐标信息,可以利用最小二乘法或其他标定算法计算出相机的内外参数。
4. halcon不规则点标定的步骤下面是halcon不规则点标定的基本步骤:- 步骤一:选择合适的不规则点标定板,该标定板应该具有一定的形状多样性和不规则性。
- 步骤二:在不同位置和姿态下,使用相机拍摄不同角度的图像,保证标定板占据图像的足够大的比例。
- 步骤三:使用halcon提供的相关函数,从每张图像中提取出标定板上各个点的坐标信息。
- 步骤四:根据每个点在三维世界坐标系中的实际坐标和图像中的像素坐标,使用标定算法计算出相机的内外参数。
- 步骤五:利用得到的内外参数,对其他图像进行校正和测量,得到准确的三维空间位置和姿态。
5. halcon不规则点标定的优势相较于传统的纸质标定板,halcon不规则点标定具有以下几个优势:- 准确性更高:不规则点标定板能够提供更多的信息,从而提升标定的准确性。
Halcon標定板規格
圖一:
30*30 規格的標定板的規格
黑色圓點行數:7
黑色圓點列數:7
外邊框長度:30mm*30mm
內邊框長度:28.125mm*28.125mm 即:黑色邊框線寬為一個圓點半徑(0.9375)黑色圓點半徑:0.9375mm
圓點中心間距: 3.75mm
裁剪寬度:30.75mm*30.75mm 即:由黑色邊框向外延伸0.375mm
邊角:由黑色外邊框向內縮進一個中心邊距的長度
40*40 規格的標定板的規格
黑色圓點行數:7
黑色圓點列數:7
外邊框長度:40mm*40mm
內邊框長度:37.5mm*37.5mm 即:黑色邊框線寬為一個圓點半徑(0.125)
黑色圓點半徑:0.125mm
圓點中心間距:5mm
裁剪寬度:21mm*21mm 即:由黑色邊框向外延伸0.5mm
邊角:由黑色外邊框向內縮進一個中心邊距的長度
50*50 規格的標定板的規格
黑色圓點行數:7
黑色圓點列數:7
外邊框長度:50mm*50mm
內邊框長度:46.875mm*46.875mm 即:黑色邊框線寬為一個圓點半徑(1.5625)黑色圓點半徑: 1.5625mm
圓點中心間距: 6.25mm
裁剪寬度:51.25mm*51.25mm 即:由黑色邊框向外延伸0.625mm
邊角:由黑色外邊框向內縮進一個中心邊距的長度
60*60 規格的標定板的規格
黑色圓點行數:7
黑色圓點列數:7
外邊框長度:60mm*60mm
內邊框長度:56.25mm*56.25mm 即:黑色邊框線寬為一個圓點半徑(1.875)
黑色圓點半徑: 1.875mm
圓點中心間距:7.5mm
裁剪寬度:61.5mm*61.5mm 即:由黑色邊框向外延伸0.75mm
邊角:由黑色外邊框向內縮進一個中心邊距的長度。