一种基于Halcon的机器人视觉系统标定方法_CN109859277A
- 格式:pdf
- 大小:533.56 KB
- 文档页数:10
基于H ALCON的机器人视觉标定
陈阳光;王磊
【期刊名称】《光学仪器》
【年(卷),期】2016(038)004
【摘要】基于HALCON平面标定板,充分考虑机器人末端中心和摄像机镜头径向畸变的影响,设计了一种新的Eye-to-Hand机器人视觉标定方法。
该方法不仅标定了摄像机的内外参数,同时也建立了摄像机图像坐标系和机器人世界坐标系的关系。
实验证明,该方法具有较高的标定精度和实用性,适用于工业机器人的视觉系统标定。
【总页数】5页(P320-324)
【作者】陈阳光;王磊
【作者单位】厦门大学机电工程系,福建厦门 361005;厦门大学机电工程系,福建厦门 361005
【正文语种】中文
【中图分类】TB133
【相关文献】
1.基于BP神经网络的包装分拣机器人视觉标定算法 [J], 章晓峰; 李光; 肖帆; 杨家超; 马祺杰
2.基于工业机器人视觉的摄像机标定系统 [J], 曹启贺
3.基于Halcon的机器人视觉标定与应用研究 [J], 高成;樊易飞;佟维妍
4.基于图像的无标定机器人视觉伺服的研究 [J], 罗永超;李石朋;李迪
5.基于残差BP神经网络的6自由度机器人视觉标定 [J], 李光;章晓峰;杨加超;马祺杰
因版权原因,仅展示原文概要,查看原文内容请购买。
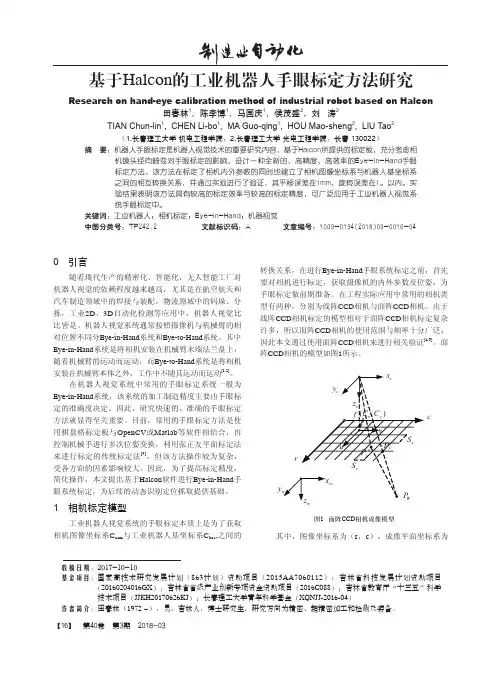
基于Halcon 的工业机器人手眼标定方法研究Research on hand-eye calibration method of industrial robot based on halcon田春林1,陈李博1,马国庆1,侯茂盛2,刘 涛2TIAN Chun-lin 1, CHEN Li-bo 1, MA Guo-qing 1, HOU Mao-sheng 2, LIU Tao 2(1.长春理工大学 机电工程学院,2.长春理工大学 光电工程学院,长春 130022)摘 要:机器人手眼标定是机器人视觉技术的重要研究内容,基于Halcon所提供的标定板,充分考虑相机镜头径向畸变对手眼标定的影响,设计一种全新的、高精度、高效率的Eye-in-Hand手眼标定方法,该方法在标定了相机内外参数的同时也建立了相机图像坐标系与机器人基坐标系之间的相互转换关系,并通过实验进行了验证,其平移误差在1mm,旋转误差在1。
以内。
实验结果表明该方法具有较高的标定效率与较高的标定精度,可广泛应用于工业机器人视觉系统手眼标定中。
关键词:工业机器人;相机标定;Eye-in-Hand;机器视觉中图分类号:TP242.2 文献标识码:A 文章编号:1009-0134(2018)03-0016-04收稿日期:2017-10-10基金项目:国家高技术研究发展计划(863计划)资助项目(2015AA7060112);吉林省科技发展计划资助项目 (20160204016GX );吉林省省级产业创新专项资金资助项目(2016C088);吉林省教育厅“十三五”科学 技术项目(JJKH20170626KJ );长春理工大学青年科学基金(XQNJJ-2016-04)作者简介:田春林(1972 -),男,吉林人,博士研究生,研究方向为精密、超精密加工和检测及装备。
0 引言随着现代生产的精密化、智能化,无人智能工厂对机器人视觉的依赖程度越来越高,尤其是在航空航天和汽车制造领域中的焊接与装配,物流领域中的码垛、分拣,工业2D 、3D 自动化检测等应用中,机器人视觉比比皆是。
基于Halcon的大视场视觉标定方法研究张勇; 漆军【期刊名称】《《机电工程技术》》【年(卷),期】2019(048)008【总页数】3页(P1-3)【关键词】视觉标定; Halcon; 坐标转换【作者】张勇; 漆军【作者单位】广东机电职业技术学院广东广州 510550【正文语种】中文【中图分类】TP391.410 引言近年来,机器视觉技术快速发展且日益成熟,其在工业加工过程的应用越来越广泛,特别是在微电子封装、五金、服饰等行业的点胶加工中,控制系统采用机器视觉完成模板匹配定位可实现高精度、高频率、高效率的自动加工。
标定是机器视觉使用中必不可少的一个步骤,要利用摄像机进行视觉感知获取目标的位置等三维信息就必须进行摄像机标定[1],空间某点的位置和其在图像中对应映射点之间的关系是由摄像机成像的数学模型唯一确定[2],该模型是由摄像机内部几何与光学特性参数(内参)和表示摄像机在三维空间坐标系中位置和方向的参数(外参)组成,确定内外参数的过程即摄像机标定[3-5]。
本文针对视觉点胶行业中的大视场加工要求,提出一种基于Halcon相机畸变校正与画网格提取角点进行加工区域坐标标定相结合的方法,在完成点胶控制系统中机器视觉标定功能的同时,可快捷准确进行点胶加工轨迹的规划与转换,从而提升控制系统操作便捷性,极大提高了加工效率。
1 系统结构如图1、图2所示,本系统采用四轴运动控制卡+工控机+工业相机的架构,为了增加视场的视野,将工业相机直接安装与机器顶部可对整个加工区域进行拍照采集,本系统采用的是2 000万像素工业相机,拍照的加工区域达到600 mm×400 mm,满足当前服饰点胶行业对加工视场宽度越来越高的需求。
图1 系统结构图控制系统的主要执行流程如下:工业相机标定->画网格提取角点确定坐标对应关系->视觉勾图确定加工路径->实际生产加工启动->拍照->图片畸变处理->模板匹配->根据坐标对应关系确定所有匹配产品加工路径->产品喷胶加工->完成,如图3所示。
halcon自标定方法Halcon自标定方法Halcon是一种常用的机器视觉软件,用于开发和实现各种图像处理和机器视觉应用。
在机器视觉领域,相机的标定是非常重要的一步,它能够精确地确定相机的内部参数和外部参数,从而提高图像处理的精度和准确性。
Halcon提供了自标定方法,使相机的标定过程更加简便和高效。
自标定方法基于相机的特征点,通过在图像中检测和匹配特征点来确定相机的内部参数和外部参数。
下面将详细介绍Halcon的自标定方法。
1. 特征点提取在自标定过程中,首先需要从图像中提取特征点。
Halcon提供了多种特征点提取算法,如Harris角点检测、SIFT算法等。
根据实际应用场景的需求,选择合适的算法进行特征点提取。
2. 特征点匹配特征点提取后,需要进行特征点的匹配。
Halcon提供了多种特征点匹配算法,如基于描述子的匹配算法、基于相似性变换的匹配算法等。
通过计算特征点之间的相似性,确定它们之间的对应关系。
3. 相机标定特征点匹配完成后,即可进行相机的标定。
Halcon提供了基于特征点的标定方法,通过求解相机的内部参数和外部参数,得到相机的准确标定结果。
标定过程中需要提供已知的标定板,通过测量标定板上的特征点坐标和图像中对应特征点的像素坐标,计算相机的内部参数和外部参数。
4. 标定结果评估标定过程完成后,需要对标定结果进行评估。
Halcon提供了多种评估方法,如重投影误差、畸变系数等。
通过对比实际观测值和标定结果的差异,评估标定的准确性和精度。
5. 标定结果应用标定结果可以应用于各种机器视觉应用中,如图像校正、目标检测和跟踪等。
通过应用标定结果,可以提高图像处理和机器视觉算法的准确性和稳定性。
总结:Halcon的自标定方法是一种简便高效的相机标定方法,通过特征点提取和匹配,求解相机的内部参数和外部参数,从而实现对相机的准确标定。
标定结果可以应用于各种机器视觉应用中,提高图像处理和算法的准确性和稳定性。
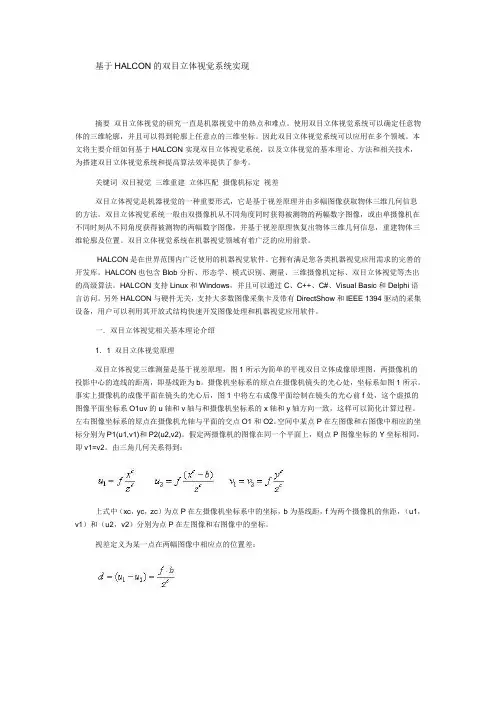
基于HALCON的双目立体视觉系统实现摘要双目立体视觉的研究一直是机器视觉中的热点和难点。
使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。
因此双目立体视觉系统可以应用在多个领域。
本文将主要介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率提供了参考。
关键词双目视觉三维重建立体匹配摄像机标定视差双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。
双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体三维几何信息,重建物体三维轮廓及位置。
双目立体视觉系统在机器视觉领域有着广泛的应用前景。
HALCON是在世界范围内广泛使用的机器视觉软件。
它拥有满足您各类机器视觉应用需求的完善的开发库。
HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。
HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。
另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。
一.双目立体视觉相关基本理论介绍1.1 双目立体视觉原理双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。
摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。
事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。
基于Halcon的机器人手眼标定方法研究舒奇;黄家才【摘要】手眼标定是机器人视觉系统建立过程中的重要环节,本文基于Halcon软件,结合特制的标定板并充分考量相机畸变的影响,提出一种快速、精确、高效的手眼标定方法,该方法在标定过程中建立相机图像坐标系与机器人坐标系转换关系的同时获得相机内外参数.在UR5机器人平台上进行试验验证,试验结果表明该方法可提高标定效率与标定精度,且算法具有良好的跨平台移植性.【期刊名称】《南京工程学院学报(自然科学版)》【年(卷),期】2019(017)001【总页数】5页(P45-49)【关键词】手眼标定;机器人;UR5【作者】舒奇;黄家才【作者单位】南京工程学院自动化学院,江苏南京211167;南京工程学院自动化学院,江苏南京211167【正文语种】中文【中图分类】TP242.2随着工业自动化的大力发展,机器人视觉的应用越来越广,尤其在物流分拣、汽车制造装配与焊接、自动化生产检测等领域中.机器人视觉系统按照相机与机械臂的相对位置可以分为Eye-in-Hand系统和Eye-to-Hand系统.Eye-in-Hand系统中,相机安装在机械臂TCP末端处,随机械臂运动;Eye-to-Hand 系统中,将相机独立安装在机械臂本体外,其位置不受机械臂运动影响[1].目前,常用的手眼标定系统多为Eye-in-Hand系统,常用实心圆整列图案和国际象棋棋盘图案作为标定板,结合Halcon或者Opencv等软件进行标定.Halcon中的算子库拥有与三维世界相关的坐标转换部分的算子,与工业机器人有良好的合作配合.传统的标定方法,如张正友平面标定法,控制机械手进行位姿变换,进行标定;文献[2]利用Hlcon结合机器人完成了纺织行业中织物的分拣任务;文献[3]采用Halcon编程实现了金属零件矩形度检测;文献[4]基于机器视觉的跟踪抓取,完成超市内分拣上料和装配工作.但是这类传统方法操作繁琐,标定过程受外部影响大.为简化传统标定方法的操作、提高标定效率、保证标定精度,设计一种基于Halcon软件的机器人Eye-in-Hand标定方法,为动态识别定位抓取提供基础.1 视觉系统标定机器视觉本质是通过图像来获取三维世界的信息,然后基于该信息进行相应的图像处理,从中获取想要的信息.标定的过程实际是建立图像世界与三维世界位姿的关系,只有准确地建立了该关系,才能从图像准确得知三维世界的真实状态.因此需要获得两种参数,一是内部参数,是摄像机自身特性的参数,包括图像主点坐标、单个像元的高宽、摄像机的有效焦距f和透镜的畸变失真系数k等,通过这些参数,才能够建立由标定板确定的三维坐标系与相机图像坐标系的映射关系[5];二是外部参数,获得靶标的坐标系相对于摄像机坐标系之间的变换关系.整个视觉系统标定流程见图1. 图1 视觉系统标定流程假设p点在世界坐标系下的齐次坐标为(Xw,Yw,Zw,1),在摄像机坐标下的齐次坐标为(Xc,Yc,Zc,1),那么存在数学关系为:(1)式中:R为3×3的正交单位矩阵;t=[0 0 d]T,d为相机坐标系光轴中心点O到物体平面的距离;M1为4×4的矩阵.图像坐标系与像素坐标系的变换公式为:(2)式中:像素坐标系下的坐标为(u0,v0);像素点在图像坐标系的坐标为(X,Y),其物理尺度为dX,dY.根据式(1)与式(2),可以得到世界坐标系与像素坐标系的转换矩阵:(3)式中:fx、fy分别为u、v轴上的尺度因子;M1为摄像机的内参,只与摄像机的内部参数有关;M2为摄像机的外参,由摄像机相对于世界坐标系的方法决定,完成摄像机的标定任务,即可通过试验获得摄像机的内、外参数.1.1 相机内参标定机器视觉系统的经典组成包括: 被测物体、光源、相机、镜头、图像处理软件系统、执行机构,其中相机与镜头的选型尤为重要.在选择相机的过程中通常需要考虑分辨率、感光芯片尺寸、像素尺寸、帧率以及像素深度等[6].本系统采取的三维标定,是Halcon默认的标定方法,这种方法可以消除径向畸变和视角畸变,在XYZ方向平移和旋转标定板,采集18张图像,相机和镜头参数作为标定过程中算子StartCamPar的初值.为方便标定,本系统使用的靶标是Halcon特制的标定板,标定过程中调用已封装的算子,通过组合其算子和设置参数即可得到相机的内部参数.标定流程图如图2所示,通过调用内参标定算子calibrate_cameras(CalibDataID, Error),即可输出标定后的相机内部参数.图2 标定流程图1.2 手眼标定相机的内参标定主要是对相机的畸变进行一个矫正,使相机拍摄出来的图像能够真实反映三维世界的信息.内参标定是为了能够准确看到二维图像,但是却无法从二维图像中得到准确的三维世界的精确信息,想要在二维和三维之间建立一个精确的联系仅仅有相机的内参标定是远远不够的,还需要对相机的外部参数进行标定,也就是进行手眼标定[7].图3为手眼标定示意图,图3中:W为机器人的世界坐标系;E 为机器人末端坐标系;C为摄像机坐标系;G为标定板坐标系;T6代表坐标系W 到E之间的转换,在每次末端姿态变化后,可以由机器人参数中获得;Tm代表坐标系E到C之间的转换,是一个待求取的未知固定矩阵,也是手眼标定需要求取的参数;Tc代表坐标系C到G之间的转换,在每次末端姿态变化后,求取得到摄像机相对于靶标的外参数.图3 手眼标定示意图假设Tg是坐标系W到G之间的变换,则根据坐标系之间的变换关系,可以得到第i 次拍摄标定图像的转换公式为:Tg(i)=T6(i)TmTc(i)(4)通过标定板的多次不同的位置姿态采集标定图像,获得多个方程组成的方程组,解方程组即可求得Tm的值.利用Halcon软件进行手眼标定的流程如图4所示.图4 手眼标定2 坐标转换在机械手臂抓取运动过程中主要涉及机器人基坐标系、机器人关节坐标系(杆件坐标系)、工具坐标系和世界坐标系[8].整个过程的变换实质是将图像坐标系的坐标转换为基坐标的位姿变换.在进行坐标系转换之前,已经通过相机标定和手眼标定得到相机坐标系与UR机器人工具坐标系之间的相互关系,并得到了工具坐标系相对于相机坐标系的位姿camHtool,同时定义一个工件坐标系为参考坐标系,可以得到工件坐标系相对于相机坐标系的位姿camHobj,世界坐标系是相对于机器人的基坐标系给出的,因此可以得出工具坐标系相对于基坐标系的位姿baseHtool.那么,工件坐标系相对于基坐标系的位姿计算式为:baseHobj=baseHtool(camHtool)-1 camHobj(5)式(5)表示出最终需要的工件位姿,得到这个位姿便可以给机器人发送运动指令,控制手抓进行抓取任务.坐标系转换具体流程如图5所示.图5 坐标系转换流程3 综合控制平台试验结果本试验利用VS2010与Halcon 12进行混编,其中在VS2010上调用Halcon的库将相机标定与手眼标定结合在一起,因为在进行内参标定的时候已经读入了许多标定图片,在不同角度拍摄标定图片的时候,每幅图片都相对应着一个机器人手抓在机器人基坐标系中的姿态,将姿态读入标定图像的同时也读入了标定模板,这样就可以进行手眼标定的计算,由此只需要在一块标定板上进行一次标定,即可获得相机内、外部参数.图6为视觉标定界面.图6 视觉标定程序界面将标定板放置于平整桌面任意位置(不一定是工作面上),调整UR姿态将摄像头垂直向下对准标定板,并使标定板处于显示的限定框内,调整摄像头焦距使成像清晰,调整摄像头光圈到中间位置,等待程序做自动补光调整(10 s左右);程序画面显示发现标定板,在图像上长按鼠标左键开始自动标定;UR机器人将自动旋转改变姿态并实时摄取图像直至标定完成,过程中不需人为干预.标定结束后,标定结果会自动存入文件,不需手动存入.上述流程获得三组相机内部参数如表1所示.三组试验数据的平均误差均在0.17~0.18像素之间,反映了较高的标定精度.查阅所使用的相机镜头,选择焦距值接近的第一组相机内部参数.随后通过记录的18张图片和各张图片对应的位姿信息,调用calibrate_hand_eye (CalibDataID, Errors)算子后,最终得到手眼标定的结果,如表2所示.表1 工业相机内部参数组序焦距fCx/mmCy/mmSx/mmSy/mm平均误差第一组7.235 9370.117297.6912.2192.200.186 395第二组7.6344371.899281.4382.2312.190.187 233第三组7.9573325.606239.5192.1992.210.179 424表2 手眼标定结果标定变量标定结果/m标定变量标定结果/(°)x坐标0.083 854 3x轴旋转量90.061 9y坐标0.002 052 2y轴旋转量0.658 2z坐标0.172 143 0z 轴旋转量90.188 2采用本文的方法,利用Halcon进行手眼标定,整个过程大约耗时45 ms即可得到其相应的转换矩阵,其过程相对于传统方法更加方便、高效并且标定精度相对较高.通过本文的方法还可以快速地获得图3所示的各个坐标系之间的转换关系,为之后进行识别抓取试验提供良好的基础.但是通过试验结果也可以看出,标定数据依然存在误差.误差产生的主要原因有:1) 摄像机精度的影响,试验过程中,摄像头的精度是有限的,这必定会给实际标定带来误差;2) 实际的噪声干扰,在采集标定板图片的过程中,由于光照的变化和不均匀,会造成标定的偏差;3) 机械手臂的抖动,摄像机固定在机械臂末端,在实际拍摄中,不可避免地会由于机械臂的抖动而产生图像的模糊,最终会造成角点像素坐标的不准确,从而影响标定结果.4 结语研究并提出一种适用于Eye-in-hand类型的手眼标定方法,试验结果表明该方法既提高了系统的标定精度,又减少了繁杂的操作步骤.利用Halcon与VS进行的联合二次开发程序,具有很好的跨平台性,可大规模应用于工业生产,极大提高了生产效率. 参考文献:【相关文献】[1] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.[2] 戴庭宣.基于双目视觉的机器人织物抓取系统[J].电脑知识与技术, 2017, 13(5):132-134.[3] 刘馨, 周彬, 秦玉娟.基于Halcon的金属零件矩形度检测算法研究[J].自动化与仪器仪表,2017(7):31-32.[4] 陈甦欣, 魏前龙, 王正阳,等.基于视觉的运动目标跟踪抓取和装配研究[J].机床与液压, 2018(3):12-15.[5] 卢泉奇, 苗同升, 汪地,等.基于Halcon的机械手视觉抓取应用研究[J].光学仪器, 2014,36(6):492-498.[6] 闫霞, 牛建强.基于Halcon软件的摄像机标定[J].数字技术与应用, 2010(11):112-113.[7] 张云珠.工业机器人手眼标定技术研究[D].哈尔滨:哈尔滨工程大学, 2010.[8] 陈阳光, 王磊.基于Halcon的机器人视觉标定[J].光学仪器, 2016, 38(4):320-324.。
现代电子技术Modern Electronics Technique2023年7月1日第46卷第13期Jul.2023Vol.46No.130引言随着生产技术发展和产业转型升级,机器人视觉在自动化和智能化的应用越来越广,工业机器人代替人工劳动是发展的趋势[1]。
视觉是机器人的“眼睛”,利用视觉可以实现对机器人的控制和定位,如基于Kinect 视觉功能的机器人控制[2]、基于双目立体视觉的目标识别定位[3]。
其中双目立体视觉是机器人视觉的一项重要研究内容,在机械制造、智能驾驶、医疗器械等领域应用广一种基于双目视觉和Halcon 的高效机器人手眼标定方法程强1,2,黄河1,2,许静静1,2,李江晗3,李迎1,2,张涛1,2(1.北京工业大学先进制造与智能技术研究所,北京100124;2.北京工业大学先进制造技术北京市重点实验室,北京100124;3.东北农业大学电气与信息学院,黑龙江哈尔滨150006)摘要:针对机器人在标定过程中追求快速、简捷、高效的特点,提出一种基于双目视觉和Halcon 的高效机器人手眼标定方法。
基于张正友棋盘格标定法和OpenCV 中亚像素角点检测算法完成对双目相机内外参数的获取,对比运用不同的立体匹配算法和三维重建生成具有三维坐标的立体空间点云,从而得到相机坐标系下目标的位置坐标,之后取机器人坐标下的10组末端位置坐标以及相机坐标系下对应的10组位置坐标后,借助Halcon 视觉软件的vector_to_hom_mat3d 算子求解出相机和机器人坐标系的转换矩阵,完成机器人手眼标定。
经过实验验证,该标定方法平均误差为3.58mm ,满足一般机器人工作要求,并且相比传统的手眼标定无需借助复杂的标定工具,且计算过程简捷高效。
关键词:机器人标定;手眼标定;双目视觉;相机标定;立体匹配;三维重建;实验分析中图分类号:TN911.73⁃34;TP242.3文献标识码:A文章编号:1004⁃373X (2023)13⁃0035⁃08An efficient robot hand⁃eye calibration methodbased on binocular vision and HalconCHENG Qiang 1,2,HUANG He 1,2,XU Jingjing 1,2,LI Jianghan 3,LI Ying 1,2,ZHANG Tao 1,2(1.Institute of Advanced Manufacturing and Intelligent Technology,Beijing University of Technology,Beijing 100124,China;2.Beijing Key Laboratory of Advanced Manufacturing Technology,Beijing University of Technology,Beijing 100124,China;3.School of Electrical and Information,Northeast Agriculture University,Harbin 150006,China)Abstract :In view of the robot′s pursuit of fast,simple and efficient characteristics in the calibration process,an efficient robot hand ⁃eye calibration method based on binocular vision and Halcon is proposed.The acquisition of internal and external parameters of the binocular camera is completed on the basis of checkerboard calibration method proposed by Zhang zhengyou and sub⁃pixel corner detection algorithm in OpenCV.The stereo space point clouds with 3D coordinates,which are generated by different stereo matching algorithms and 3D reconstruction,are contrasted to get the coordinate of the target location under camera coordinate system.With the help of the vector_to_hom_mat3d operator of the Halcon vision software,the transformation matrix of the camera and the robot coordinate system is solved after 10groups of terminal location coordinates under camera coordinate system and corresponding 10groups of location coordinates are obtained.And the robot hand ⁃eye calibration is completed.The results of experimental verification indicate that the average error of this calibration method is 3.58mm,whichcan meet the working requirements of general robots.In comparison with the traditional hand ⁃eye calibration,this calibration method does not need complex calibration tools,and its calculation process is simple and efficient.Keywords :robotic calibration;hand⁃eye calibration;binocular vision;camera calibration;stereo matching;3D reconstruc⁃tion;experimental analysisDOI :10.16652/j.issn.1004⁃373x.2023.13.007引用格式:程强,黄河,许静静,等.一种基于双目视觉和Halcon 的高效机器人手眼标定方法[J].现代电子技术,2023,46(13):35⁃42.收稿日期:2022⁃11⁃07修回日期:2022⁃11⁃23基金项目:国家自然科学基金资助项目(5197050489)35现代电子技术2023年第46卷泛[4]。
基于HALCON的双目视觉系统标定李哲;项辉宇;韩宝安;黄佳军【摘要】论文对现有的双目视觉标定方法进行论述,阐述了双目视觉系统的原理,深入的介绍了双目视觉系统标定的原理,方法.此外,针对如何使用HALCON软件进行双目标定进行了详细的论述,分析了面阵摄像机的标定过程,该方法简单易行,充分发挥了HALCON的函数库功能,提高了标定精度和计算速度,而且具有良好的跨平台移植性.【期刊名称】《机电产品开发与创新》【年(卷),期】2013(026)003【总页数】3页(P95-97)【关键词】机器视觉;双目视觉;标定Halcon【作者】李哲;项辉宇;韩宝安;黄佳军【作者单位】北京工商大学材料与机械工程学院,北京100048;北京工商大学材料与机械工程学院,北京100048;北京工商大学材料与机械工程学院,北京100048;北京工商大学材料与机械工程学院,北京100048【正文语种】中文【中图分类】TP3170 引言根据标定方式的不同,现有的相机标定方法可以分为传统标定方法、自标定方法和基于主动视觉的标定方法。
传统标定方法是指利用一个尺寸已知的高精度标定物作为空间参照,通过建立标定物某点与其图像点的对应关系,利用相关算法获得相机的内外参数。
此方法的不足在于标定物的制造成本高,其精度直接影响标定结果,而且某些场合下不适合放置标定物。
自标定方法是指不需要标定物,仅利用场景约束或相机运动约束,依靠多幅图像对应点之间的关系进行标定。
但此方法标定精度不高,不合适在精确测量的场合下使用。
基于主动视觉的标定方法是指在己知相机的某些运动信息下标定相机的方法。
虽然此算法简单,鲁棒性较高,但是该方法需要使用高精度主动视觉平台进行相机标定,实验设备昂贵,实验条件要求高,且不适合运动参数未知或无法控制的场合。
因此,在以上标定方法的基础上,本文介绍一种利用HALCON软件的平面圆靶标双目视觉标定方法。
实验证明此方法测量精度高,鲁棒性强,适用范围广。
基于HALCON的机器人视觉标定机器人视觉控制[2-2]是机器人领域的重要研究方向,也是当前的研究热点之一。
其系统按照摄像机与机器人的相对位置分为Eye-to- Hand系统和Eye-in-Hand系统。
Eye-to-Hand系统将摄像机固定安装于机器人本体之外。
随着工业化水平与科技的不断发展,劳动力成本增加,对定位装配的精度和自动化要求也越来越髙。
基于机器视觉技术的工业机器人定位[3-4]具有定位精度髙、自动化和智能化水平高、劳动力成本低等优点,因此在定位装配领域有着广泛的应用。
本文建立了机器人Eye-to-Hand系统,主要论述了一种基于HALCON 的摄像机内外部参数和手眼关系标定方法与其实验过程。
该标定方法具有操作简单,定位精度高等特点,适用于产品抓取定位。
1机器人视觉标定模型机器人视觉系统的标定其实是获取摄像机图像坐标系(ICS)与机器人坐标系(RCS)之间转换关系的过程,在标定机器人视觉系统(Eye-to-Hand)之前,首先要对摄像机进行标定。
通常摄像机镜头会存在径向、切向和偏心等畸变,因此需要选择合适的畸变模型对摄像机进行标定。
工业镜头的畸变主要为径向畸变,为线性畸变模型;非线性模型畸变包括径向、切向和偏心等畸变。
对于工业镜头,使用非线性畸变模型往往不能提髙其标定精度,而且还会造成求解的不稳定[5- 6];采用线性畸变模型,可以使标定精度提髙一个数量级,与非线性畸变模型相比标定精度差别不大。
因此本文在论述中釆用线性畸变模型来标定机器人视觉系统,其标定模型如图2所示。
图1中,(Oc, Xc, Yc, Zc)为摄像机坐标系(CCS), Oc即为摄像机的投影中心,z轴与摄像机的主光轴重合;(Ow, Xw, Yw, Zw) 为机器人坐标系(世界坐标系WCS); (Oi, Xi, Yi)为成像平面坐标系(IPCS); (Ou, Xu, Yu)为图像坐标系(ICS)o空间一点P在CCS 下的坐标为P (xc, yc, zc);在WCS下的坐标为P (xw, yw, zw)。
基于HALCON软件的摄像机标定HALCON是一种非常强大的计算机视觉软件,可以用于许多应用领域,包括自动化、机器视觉、医学成像等。
在这些不同的领域,HALCON用户需要对摄像机进行标定,以便准确地测量和分析图像。
在本文中,我们将探讨如何使用HALCON进行摄像机标定。
摄像机标定的基本原理摄像机标定是计算机视觉中的一个重要过程。
在这个过程中,我们需要找到摄像机内部的一些参数,以便能够准确地测量对象的大小、位置和方向。
这些参数包括内部参数和外部参数。
内部参数包括焦距、畸变和像素距离等,这些参数决定了光学系统如何将世界坐标系中的点映射到图像平面上。
外部参数包括摄像机的位置和朝向,这些参数决定了摄像机如何拍摄场景。
因此,摄像机标定的目标就是确定这些参数。
摄像机标定的步骤摄像机标定通常涉及到摄像机的内部参数和外部参数,因此标定的步骤通常包括两个部分。
第一步是内部参数标定,我们需要用一些已知的三维坐标对摄像机的成像进行测量,得到这些坐标在图像中的投影。
这些点的坐标通常以像素为单位,我们可以使用极线几何或者张正友标定法等方法来求解内部参数。
第二步是外部参数标定,我们需要知道摄像机对于目标的位置和朝向。
通常我们使用标定板或者其他点来测量这些参数。
标定板通常是一个具有已知格子的图案,我们可以测量这些格子在图像中的位置,然后使用PnP算法和非线性优化等数学方法计算摄像机的位置和朝向。
HALCON摄像机标定步骤和代码接下来我们将介绍如何使用HALCON进行摄像机标定。
首先我们需要准备一些标定板或者其他特殊图案。
这些标定板通常由黑白相间的正方形组成,我们需要利用这些正方形来求解内部参数和外部参数。
1. 导入图像首先,我们需要使用HALCON导入摄像机标定所需的图像。
通常我们需要拍摄一系列的标定板图像,这些图像应该包括各种不同的摄像机角度和位置。
这些图像将用于内部参数和外部参数的标定过程。
通常在导入图像之前,需要对图像进行预处理,例如去除噪声和平滑化处理。
一种基于机器视觉的机器人标定方法
李振;张玉茹;刘军传
【期刊名称】《机械设计与研究》
【年(卷),期】2007(23)3
【摘要】机器人标定是离线编程技术实用化的关键技术之一。
提出了一种基于机器视觉的机器人标定方法,利用双目视觉测量机器人上的目标点,通过目标点位置的测量撮出机器人的关节轴线,根据相应的运动学模型求出机器人的几何参数,并解决了在测量过程中摄像机视野小的问题。
实验结果表明该方法能够实现机器人几何参数的标定,提高了机器人的绝对精度。
【总页数】4页(P66-69)
【关键词】机器人;标定;机器视觉
【作者】李振;张玉茹;刘军传
【作者单位】北京航空航天大学机器人研究所
【正文语种】中文
【中图分类】TP24
【相关文献】
1.机器视觉技术中一种基于反对称矩阵及RANSAC算法的摄像机自标定方法 [J], 王赟
2.一种基于机器视觉的自动标定贴屏实现方法 [J], 李俊蒂;徐敏;苏鹭梅;陈州尧
3.基于机器视觉的工业机器人标定方法研究 [J], 付贵
4.机器视觉理论下的工业机器人标定方法探析 [J], 赵永豪
5.一种基于HALCON的机器视觉系统的标定方法 [J], 田昊;黄海龙;赵宝水
因版权原因,仅展示原文概要,查看原文内容请购买。
基于HALCON的机器人手眼标定精度分析与反演方法
杨厚易
【期刊名称】《信息技术与网络安全》
【年(卷),期】2018(037)001
【摘要】通过视觉引导机器人完成抓取任务,机器人手眼标定的精度直接影响了
抓取任务作业精度和抓取成功率。
对于基于位置的机器人视觉引导系统,手眼标定的任务则是确定机器人坐标系与相机坐标系之间的位姿关系。
通过HALCON平台,使用线性标定法实现了6DOF机器人的手眼标定。
对手眼标定的结果进行反演,
直观地展示了手眼标定的精确程度。
最后通过采集多组不同数量的图片,在HALCON平台下验证了不同摄像机模型对手眼标定的精度影响,以及同种摄像机模型在不同数量图片的情况下手眼标定的标定精度。
实验证明,根据位姿矩阵中待求解的未知量个数采集合适数量的图片和使用更精确的摄像机模型能够提高手眼标定的精度。
【总页数】4页(P97-100)
【作者】杨厚易
【作者单位】西南科技大学信息工程学院,四川绵阳621010
【正文语种】中文
【中图分类】TP391
【相关文献】
1.机器人手眼标定及其精度分析的研究
2.基于Halcon的工业机器人手眼标定方法研究
3.基于HALCON的机器人手眼标定精度分析与反演方法
4.基于Halcon的机器人手眼标定方法研究
5.基于Halcon的机器人手眼标定方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。