贴片机分类及基本工作原理分解
- 格式:ppt
- 大小:1.42 MB
- 文档页数:31
自动化贴片机工作原理
自动化贴片机是一种用于贴装电子元件的设备,其工作原理是通过控制系统将电子元件从供料器送至贴片头,再精确地将元件粘贴至PCB板上。
下面是一般自动化贴片机的工作原理:
1. 图像处理:自动化贴片机首先使用高精度的摄像头对PCB
板进行图像处理,并提取出需要贴装的元件的位置和尺寸信息。
2. 运动控制:根据图像处理结果,自动化贴片机控制系统会计算出每个元件的精确位置,并通过准确的运动控制来将贴片头移动到相应的位置。
3. 供料器供料:自动化贴片机的供料器会将元件从元件库中选取出来,并将其放置在贴片头上。
供料器通常有多个通道,每个通道可以供应不同类型的元件。
4. 贴片:贴片头在准确的位置后,将元件从供料器上拾取并精确地贴到PCB板上的相应位置。
贴片头通常会使用吸真空的
方式固定元件,并在必要时使用热力或紫外线固化胶水。
5. 检测校正:在贴片过程中,自动化贴片机会不断检测和校正操作,以确保贴片的准确性和质量。
这可能涉及到重新调整贴片头的位置、调整吸真空力度或更换供料器等。
6. 输出产品:完成贴片后,PCB板上的元件已经成功贴装完
成。
将贴片后的产品从贴片机上取下,准备进一步的焊接和组装工艺。
需要注意的是,不同型号的自动化贴片机可能会有一些细微的差别,但基本的工作原理是类似的。
此外,自动化贴片机的工作速度、精度和适用的元件尺寸范围等也会因具体的设备而有所不同。
贴片机的工作原理
1 贴片机的工作原理
贴片机是一种高精度、高效率的自动化机械设备。
它可以自动完成对各种电子电路元件(如芯片、半导体分立器件等)在印刷电路板上的定位和组装,包括放置、焊接、检测等多项工艺,同时还能实现应用编程安装和内部调试,从而节省了时间成本。
贴片机的基本原理是通过一种机械装置,将一种元件储存在带有吸盘的夹头内,然后夹头动作把元件放置在PCB板上的合适之处,接着,夹头由于内部的步进电机的控制,它的上下移动精度可以达到几十微米,但元件放置的位置和精度可以达到几千分之几,然后,夹头会把元件固定在PCB板上,最后使用另外一个夹头把电极进行焊接,组装完成最终产品。
贴片机通常使用X,Y轴和Z轴三种轴为主,X,Y轴由于夹头的位置,内部装有电机及传动装置,用来控制贴片夹头的精确定位,类似于CNC机床设备;而Z轴方面是贴片机的上下升降电机,主要是负责定位放置元件到PCB板上,然后使用焊锡下料夹头把电极进行焊接,机械原理相对简单,主要是以减速电机来控制推进位置。
贴片机自动完成PCB板上元件的贴装和焊接,取代了传统人工完成的贴装,可以大大提高工作效率,实现精度贴片以及低成本贴片,是信息电子系统制造所不可缺少的设备。
led贴片机作用、原理与用途简介:LED贴片机属于SMT(SurfaceMountSystem表面贴装系统)贴片机中的一种,随着LED技术的发展,传统SMT贴片机已不能满足LED行业生产需求,此时LED贴片机便应运而生。
Led贴片机利用导轨或者线性马达原理控制驱动头;同时....LED贴片机属于SMT(Surface Mount System 表面贴装系统)贴片机中的一种,随着LED技术的发展,传统SMT贴片机已不能满足LED行业生产需求,此时LED贴片机便应运而生。
Led贴片机利用导轨或者线性马达原理控制驱动头;同时要配备专业的纺粘胶吸嘴头,这样在贴装过程中,才尽最大可能杜绝粘料、甩料等生产瑕疵;Led贴片机坦克链要求更有足够的韧性和延展性,这样才能保证其稳定性和使用寿命。
作用特点:1、视觉识别技术应用:六咀视觉全自动贴片机,视觉识别软件技术,采取不停步快速拍摄定位技术,实现光学影像扑捉定位、飞行对中;2、内置AOI检测功能:贴片机在贴装前对印刷锡膏的品质进行检查;在贴装后对贴装元器件的精度及错漏检查(选配功能);3、采用柔性上顶下压,前后顶紧方法,挟持PCB,保证PCB挟紧后不变形;4、装备两套高分辨率的影像系统,分别对PCB板,CHIP及IC进行定位;5、可贴装0402-40mmIC组件,最佳可实现15000CPH贴片速度;6、双边送料器座:双边最多可放80个8mm送料器;7、可贴装多种元器件:各种电阻、电容、IC、BGA、QFP、CFP、&μBGA;8、电机使用轻量化设计概念,可大幅减少机器运动部分重量,由此而使机器运作时消耗的功率也大幅降低到只有普通贴片机的1/4消耗,耗电可达普通贴片机1/4以下;9、磁悬浮直线电机驱动的应用,改进了原有伺服旋转式电机丝杆镙母存在速度低、噪音大的缺点。
直线电机应用的是磁悬浮技术,运动时无摩擦,无阻力,速度高,使用寿命长。
注:LED贴片机对贴装精度要求不高,但要求速度较快。
贴片机视觉系统构成原理及其视觉定位1 贴片机视觉系统构成及实现原理如图1所示,贴片机视觉系统一般由两类CCD摄像机组成。
其一是安装在吸头上并随之作x-y方向移动的基准(MARK)摄像机,它通过拍摄PCB上的基准点来确定PCB板在系统坐标系中的坐标;其二是检测对中摄像机,用来获取元件中心相对于吸嘴中心的偏差值和元件相对于应贴装位置的转角θ。
最后通过摄像机之间的坐标变换找出元件与贴装位置之间的精确差值,完成贴装任务。
1.1 系统的基本组成视觉系统的基本组成如图2所示。
该系统由三台相互独立的CCD成像单元、光源、图像采集卡、图像处理专用计算机、主控计算机系统等单元组成,为了提高视觉系统的精度和速度,把检测对中像机设计成为针对小型Chip元件的低分辨力摄像机CCD1和针对大型I C的高分辨力摄像机CCD2,CCD3为MARK点搜寻摄像机。
当吸嘴中心到达检测对中像机的视野中心位置时发出触发信号获取图像,在触发的同时对应光源闪亮一次。
1.2 系统各坐标系的关系为了能够精确的找出待贴元件与目标位置之间的实际偏差,必须对景物、CCD摄像机、CCD成像平面和显示屏上像素坐标之间的关系进行分析,以便将显示屏幕像素坐标系的点与场景坐标系中的点联系起来;并通过图像处理软件分析计算出待贴元件中心相对于吸嘴中心的偏差值。
对于单台摄像机,针孔模型是适合于很多计算机视觉应用的最简单的近似模型[3]。
摄像机完成的是从3D射影空间P3到2D射影空间P2的线性变换,其几何关系如图3所示,为便于进一步解释,定义如下4个坐标系统:(1)欧氏场景坐标系(下标为w):原点在OW,点X和U用场景坐标系来表示。
(2)欧氏摄像机坐标系(下标为c),原点在焦点C=Oc,坐标轴Zc与光轴重合并指向图像平面外。
在场景坐标系和摄像机坐标系之间存在着唯一的关系,可以通过一个平移t和一个旋转R构成的欧氏变换将场景坐标系转化为摄像机坐标。
其关系如式(1)所示:(3)欧氏图像坐标系(下标为i),坐标轴与摄像机坐标系一致,Xi和Yi位于图像平面上,Oi像素坐标系的坐标为(xp0,yp0)。
贴片机的原理拱架型贴片机(Gantry)元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。
由于贴片头是安装于拱架型的X/Y坐标移动横梁上,所以得名。
拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
2)、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。
3)、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它牺牲。
这种形式由于贴片头来回移动的距离长,所以速度受到限制。
现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。
但是实际应用中,同时取料的条件较难达到,而且不同类型的元件需要换用不同的真空吸料嘴,换吸料嘴有时间上的延误。
这类机型的优势在于:系统结构简单,可实现高精度,适于各种大小、形状的元件,甚至异型元件,送料器有带状、管状、托盘形式。
适于中小批量生产,也可多台机组合用于大批量生产。
引转塔型拱架型贴片机(Turret)元件送料器放于一个单坐标移动的料车上,基板(PCB)放于一个X/Y坐标系统移动的工作台上,贴片头安装在一个转塔上,工作时,料车将元件送料器移动到取料位置,贴片头上的真空吸料嘴在取料位置取元件,经转塔转动到贴片位置(与取料位置成180度),在转动过程中经过对元件位置与方向的调整,将元件贴放于基板上。
对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
贴片机理论知识贴片机:又称“贴装机”、“表面贴装系统”(Surface Mount System),在生产线中,它配置在点胶机或丝网印刷机之后,是通过移动贴装头把表面贴装元器件准确地放置PCB焊盘上的一种设备。
分为手动和全自动两种。
全自动贴片机是用来实现高速、高精度地全自动地贴放元器件的设备,是整个SMT生产中最关键、最复杂的设备。
贴片机是SMT的生产线中的主要设备,现在,贴片机已从早期的低速机械贴片机发展为高速光学对中贴片机,并向多功能、柔性连接模块化发展。
贴片机的原理拱架型贴片机(Gantry)元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。
由于贴片头是安装于拱架型的X/Y 坐标移动横梁上,所以得名。
拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
2)、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。
3)、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它牺牲。
这种形式由于贴片头来回移动的距离长,所以速度受到限制。
现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。
但是实际应用中,同时取料的条件较难达到,而且不同类型的元件需要换用不同的真空吸料嘴,换吸料嘴有时间上的延误。
这类机型的优势在于:系统结构简单,可实现高精度,适于各种大小、形状的元件,甚至异型元件,送料器有带状、管状、托盘形式。
自动贴片机工作原理自动贴片机是一种广泛应用于电子制造业的设备,它的工作原理主要包括供料、定位、贴附和检测四个步骤。
在整个工作过程中,自动贴片机需要依靠精密的机械结构和精准的控制系统,确保贴片的准确性和稳定性。
首先,自动贴片机的工作原理之一是供料。
在工作开始之前,需要将元件供料到贴片机的工作区域。
这一步骤通常由供料器完成,供料器会将元件从元件库中取出,并通过输送带或者其他方式将元件送到贴片机的工作位置。
在这个过程中,需要保证元件的供料速度和准确度,以确保后续的工作顺利进行。
接下来是定位。
一旦元件被送到了工作区域,自动贴片机需要将元件准确地定位到PCB(Printed Circuit Board)的指定位置上。
这一步骤通常由视觉识别系统完成,视觉识别系统会通过摄像头拍摄元件和PCB的图像,然后通过图像处理算法计算出元件的位置和姿态,最终控制贴片头将元件准确地放置到PCB上。
随后是贴附。
在元件被准确定位到PCB上之后,自动贴片机会通过贴片头将元件粘贴到PCB上。
贴片头通常包括真空吸取装置和贴附装置,真空吸取装置会将元件吸取到贴片头上,然后贴附装置会将元件粘贴到PCB上。
在这一步骤中,需要保证贴片头的动作准确、稳定,以确保元件的贴附质量。
最后是检测。
一旦元件被贴附到PCB上,自动贴片机需要进行检测,以确保贴片质量符合要求。
检测通常包括视觉检测和电气检测两种方式。
视觉检测会通过摄像头拍摄贴片后的图像,然后通过图像处理算法检测贴片的位置、姿态和质量;电气检测则是通过测试仪器对贴片后的元件进行电气特性测试,以确保元件的电气性能符合要求。
综上所述,自动贴片机的工作原理主要包括供料、定位、贴附和检测四个步骤。
通过精密的机械结构和精准的控制系统,自动贴片机能够实现对元件的高速、高精度贴片,广泛应用于电子制造业中。
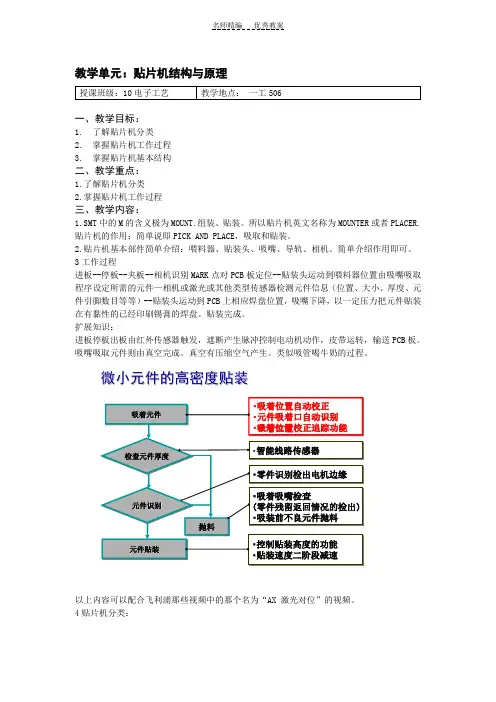
教学单元:贴片机结构与原理一、教学目标:1.了解贴片机分类2.掌握贴片机工作过程3.掌握贴片机基本结构二、教学重点:1.了解贴片机分类2.掌握贴片机工作过程三、教学内容:1.SMT中的M的含义极为MOUNT.组装、贴装。
所以贴片机英文名称为MOUNTER或者PLACER. 贴片机的作用:简单说即PICK AND PLACE,吸取和贴装。
2.贴片机基本部件简单介绍:喂料器、贴装头、吸嘴、导轨、相机。
简单介绍作用即可。
3工作过程进板--停板--夹板--相机识别MARK点对PCB板定位--贴装头运动到喂料器位置由吸嘴吸取程序设定所需的元件—相机或激光或其他类型传感器检测元件信息(位置、大小、厚度、元件引脚数目等等)--贴装头运动到PCB上相应焊盘位置,吸嘴下降,以一定压力把元件贴装在有黏性的已经印刷锡膏的焊盘。
贴装完成。
扩展知识:进板停板出板由红外传感器触发,遮断产生脉冲控制电动机动作,皮带运转,输送PCB板。
吸嘴吸取元件则由真空完成。
真空有压缩空气产生。
类似吸管喝牛奶的过程。
以上内容可以配合飞利浦那些视频中的那个名为“AX 激光对位”的视频。
4贴片机分类:视频分类放即可。
重点讲各个机器的特点。
动臂式:机器生产速度受到摩擦、高速运转发热变形、生产过程机器本身的震动等影响,速度已达极限。
且通常工作区不超过4块PCB板。
我们的机器三星一次一块板。
每小时1万片贴装能力。
转塔式:固定转塔已经淘汰。
因为要PCB板子和FEEDER移动。
最大的问题是工作噪音大震动大能耗大,且速度由于离心力的存在受到限制。
(可展开讲解离心力。
)模组式:平行模块,如同流水线上的不同工位。
一个小模块负责PCB板子上不同区域的元件贴装。
单个头不快,靠的是组合的力量。
所以在贴装速度可以高达十万片。
我们实训室的机器可以六万片。
好处是分到各个模块的任务相对较轻,这就规避了高速的丝杠磨损和发热变形,提高了设备的稳定性。
5.大致内容就是这些,最后留十分钟到二十分钟给学生翻阅学习书本上贴片机分类和结构这一章节。