虚拟手术仿真中的力反馈研究_祖超
- 格式:pdf
- 大小:662.53 KB
- 文档页数:5

《虚拟手术中软组织建模与力反馈算法研究》篇一一、引言随着现代医学技术的不断进步,虚拟手术模拟已成为医学领域的一项重要技术。
在虚拟手术中,软组织建模与力反馈算法的研究是关键环节之一。
本文旨在探讨虚拟手术中软组织建模的方法以及力反馈算法的研究进展,为提高手术模拟的逼真度和实用性提供理论支持。
二、软组织建模研究1. 建模方法概述软组织建模是虚拟手术中的重要环节,其目的是为了模拟真实手术中软组织的形态和力学特性。
目前,常用的建模方法包括基于物理的建模、基于几何的建模以及混合建模等。
(1)基于物理的建模方法:通过建立物理模型,模拟软组织的力学行为,如弹性、塑性、粘性等。
这种方法能够较为真实地反映软组织的力学特性,但计算复杂度较高。
(2)基于几何的建模方法:主要依据几何形状和表面信息来描述软组织,计算复杂度相对较低,但无法反映软组织的力学特性。
(3)混合建模方法:结合了上述两种方法的优点,既考虑了软组织的几何形状,又考虑了其力学特性,是目前研究的热点。
2. 建模技术发展随着计算机技术的不断发展,软组织建模技术也在不断进步。
目前,基于三维扫描技术的软组织建模方法已成为研究热点,该方法能够快速、准确地获取软组织的几何形状和表面信息,为虚拟手术提供了更为真实的模拟环境。
三、力反馈算法研究1. 力反馈算法概述力反馈算法是虚拟手术中的重要环节,其目的是为了模拟真实手术中的手感。
通过力反馈算法,医生可以在虚拟手术中感受到软组织的力学特性,提高手术的逼真度和实用性。
2. 力反馈算法研究进展(1)基于弹簧质点模型的力反馈算法:通过建立弹簧质点模型来模拟软组织的力学行为,实现了力的实时反馈。
该方法计算复杂度较低,但无法准确反映软组织的复杂力学特性。
(2)基于有限元法的力反馈算法:利用有限元法对软组织进行力学分析,实现了力的精确反馈。
该方法能够较为真实地反映软组织的力学特性,但计算复杂度较高。
(3)混合力反馈算法:结合了上述两种方法的优点,既实现了力的实时反馈,又保证了力的精确性。

《虚拟手术中软组织建模与力反馈算法研究》篇一一、引言随着计算机技术的飞速发展,虚拟手术仿真系统已成为医学领域的重要研究工具。
在虚拟手术中,软组织建模与力反馈算法的研究对于提高手术仿真的真实感和准确性具有重要意义。
本文旨在探讨虚拟手术中软组织建模的方法以及力反馈算法的研究进展,以期为医学教育、手术训练和临床治疗提供新的思路和方法。
二、软组织建模方法研究1. 基于物理的建模方法基于物理的建模方法是通过模拟软组织的物理特性,如弹性、塑性、粘性等,来构建虚拟软组织。
这种方法能够较好地模拟软组织的力学行为,但需要复杂的计算和较高的计算资源。
目前,研究者们通过引入先进的物理引擎和算法优化技术,不断提高建模的精度和效率。
2. 基于医学影像的建模方法基于医学影像的建模方法是通过将医学影像数据(如CT、MRI等)导入虚拟手术系统中,通过图像处理和三维重建技术来构建软组织模型。
这种方法能够准确反映软组织的形态和结构,但需要高精度的医学影像数据和复杂的图像处理技术。
3. 混合建模方法混合建模方法是结合基于物理的建模方法和基于医学影像的建模方法的优点,通过综合考虑软组织的物理特性和形态结构来构建模型。
这种方法能够更好地模拟软组织的力学行为和形态变化,但需要更多的计算资源和算法优化。
三、力反馈算法研究力反馈算法是虚拟手术仿真系统中的重要组成部分,它能够实时地模拟手术操作过程中的力反馈效果,提高手术仿真的真实感。
目前,力反馈算法的研究主要集中在以下几个方面:1. 精确的力反馈模型为了更好地模拟手术操作过程中的力反馈效果,需要建立精确的力反馈模型。
研究者们通过引入先进的力学理论和算法技术,不断提高力反馈模型的精度和可靠性。
2. 实时计算技术实时计算技术是力反馈算法的关键技术之一。
通过引入高效的计算方法和优化算法,可以提高力反馈算法的计算速度和准确性,从而更好地满足实时性要求。
3. 用户交互技术用户交互技术是力反馈算法的重要组成部分。

《虚拟手术中软组织建模与力反馈算法研究》篇一一、引言在虚拟手术模拟中,对软组织建模和力反馈算法的研究显得尤为重要。
这是因为精确的模型和力反馈机制可以提高手术的模拟真实度,使医生能够在模拟环境中进行练习和实验,提高其手术技能。
本文将重点研究虚拟手术中软组织建模的方法和力反馈算法的实现,旨在为未来的虚拟手术技术提供理论基础和技术支持。
二、软组织建模研究1. 建模方法软组织建模是虚拟手术模拟中的关键技术之一。
目前,常用的建模方法包括基于物理的建模、基于几何的建模和混合建模等。
基于物理的建模方法通过建立物理模型来模拟软组织的力学特性,如弹性、塑性等。
基于几何的建模方法则主要关注软组织的几何形状和表面特征。
混合建模则结合了两种方法的优点,既考虑了软组织的力学特性,又考虑了其几何形状。
在虚拟手术中,混合建模方法被广泛应用。
该方法通过建立软组织的三维模型,并赋予其物理属性,如密度、弹性模量等,以模拟真实的软组织。
同时,该方法还考虑了软组织的变形和力学响应,使得模拟更加真实。
2. 建模挑战与解决方案虽然软组织建模方法已经取得了一定的进展,但仍面临一些挑战。
例如,如何准确地描述软组织的力学特性,如何实现软组织的真实变形等。
为了解决这些问题,研究者们提出了多种解决方案。
其中,基于有限元方法的建模技术被广泛应用于软组织建模中。
该方法通过将软组织划分为多个小单元,并赋予每个单元以物理属性,从而实现对软组织的精确描述。
此外,研究者们还通过引入高阶多项式、神经网络等方法来提高模型的精度和稳定性。
三、力反馈算法研究1. 力反馈算法的基本原理力反馈算法是实现虚拟手术中医生与模拟环境的交互关键技术之一。
它通过测量手术器械与软组织的相互作用力,并将该力反馈给医生,使医生能够感受到手术过程中的力变化。
力反馈算法的基本原理包括力传感器测量、数据处理和力反馈控制等环节。
2. 力反馈算法的实现方法目前,常用的力反馈算法包括基于弹簧模型的算法、基于阻抗控制的算法和基于混合控制的算法等。

《虚拟手术中软组织建模与力反馈算法研究》篇一一、引言随着现代医疗技术的不断进步,虚拟手术逐渐成为一种重要的辅助治疗手段。
在虚拟手术中,软组织建模与力反馈算法的研究是提高手术操作真实感和精确度的关键技术。
本文旨在探讨虚拟手术中软组织建模的原理及力反馈算法的研究进展,为未来医疗科技的发展提供理论基础和实践指导。
二、软组织建模技术1. 物理模型基础软组织建模的基础是物理学原理,特别是弹性力学和塑性力学。
通过对软组织材料的力学特性进行数学描述,构建出具有真实感的三维模型。
该模型能够模拟出软组织的形变、弹性和力学行为,为虚拟手术提供准确的组织响应。
2. 建模方法与技术(1)基于几何学的建模方法:利用几何形状描述软组织的形态,通过调整几何参数模拟软组织的形变。
该方法简单易行,但缺乏真实感。
(2)基于物理场的建模方法:通过建立物理场模型,如弹性场或流体场,模拟软组织的力学行为。
该方法能够更真实地反映软组织的形变和力学特性,但计算成本较高。
3. 多模态融合建模为了提高软组织的模拟效果,研究学者们还提出了一种多模态融合的建模方法。
该方法结合了几何学方法和物理场方法,综合考虑了软组织在形变、弹性等方面的多种特性,使模拟结果更加真实。
三、力反馈算法研究力反馈算法是虚拟手术中实现真实感的关键技术之一。
通过力反馈算法,医生在操作虚拟手术器械时能够感受到来自软组织的反作用力,从而提高手术的精确度和安全性。
1. 力反馈算法的原理力反馈算法基于逆动力学原理,通过传感器采集到的力和位移信息,计算并输出反作用力到医生操作端。
该算法能够实时地模拟出软组织的反作用力,使医生在操作时感受到真实的触觉反馈。
2. 算法的优化与改进为了进一步提高力反馈算法的准确性和实时性,研究学者们对算法进行了优化和改进。
例如,采用更先进的传感器技术,提高数据的采集精度;优化算法的运算过程,降低计算成本;以及考虑多种物理因素,如摩擦力、惯性等,使反作用力的计算更加真实。
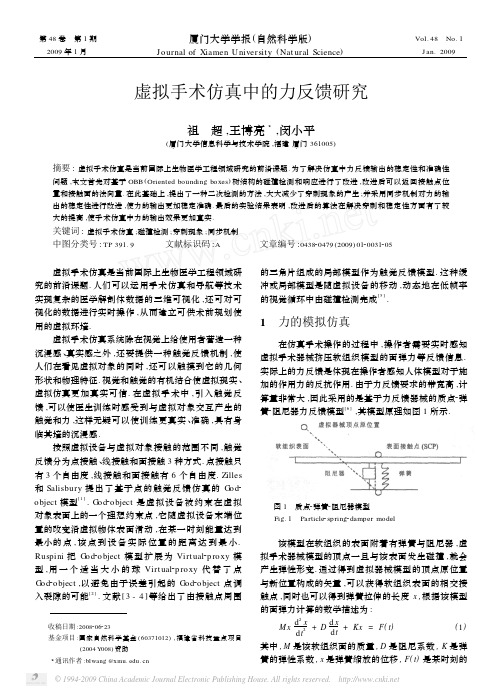
第48卷 第1期厦门大学学报(自然科学版)Vol.48 No.1 2009年1月Journal of Xiamen University (Nat ural Science )J an.2009 虚拟手术仿真中的力反馈研究祖 超,王博亮3,闵小平(厦门大学信息科学与技术学院,福建厦门361005)收稿日期:2008206223基金项目:国家自然科学基金(60371012),福建省科技重点项目(2004Y008)资助3通讯作者:blwang @摘要:虚拟手术仿真是当前国际上生物医学工程领域研究的前沿课题.为了解决仿真中力反馈输出的稳定性和准确性问题,本文首先对基于OBB (Oriented bounding boxes )树结构的碰撞检测和响应进行了改进,改进后可以返回接触点位置和接触面的法向量.在此基础上,提出了一种二次检测的方法,大大减少了穿刺现象的产生;并采用同步机制对力的输出的稳定性进行改进,使力的输出更加稳定准确.最后的实验结果表明,改进后的算法在解决穿刺和稳定性方面有了较大的提高,使手术仿真中力的输出效果更加真实.关键词:虚拟手术仿真;碰撞检测;穿刺现象;同步机制中图分类号:TP 391.9 文献标识码:A 文章编号:043820479(2009)0120031205 虚拟手术仿真是当前国际上生物医学工程领域研究的前沿课题.人们可以运用手术仿真和导航等技术实现复杂的医学解剖体数据的三维可视化,还可对可视化的数据进行实时操作,从而建立可供术前规划使用的虚拟环境.虚拟手术仿真系统除在视觉上给使用者营造一种沉浸感、真实感之外,还要提供一种触觉反馈机制,使人们在看见虚拟对象的同时,还可以触摸到它的几何形状和物理特征.视觉和触觉的有机结合使虚拟现实、虚拟仿真更加真实可信.在虚拟手术中,引入触觉反馈,可以使医生训练时感受到与虚拟对象交互产生的触觉和力,这样无疑可以使训练更真实、准确,具有身临其境的沉浸感.按照虚拟设备与虚拟对象接触的范围不同,触觉反馈分为点接触、线接触和面接触3种方式.点接触只有3个自由度,线接触和面接触有6个自由度.Zilles 和Salisbury 提出了基于点的触觉反馈仿真的G od 2object 模型[1].G od 2object 是虚拟设备被约束在虚拟对象表面上的一个理想约束点,它随虚拟设备末端位置的改变沿虚拟物体表面滑动,在某一时刻能量达到最小的点,该点到设备实际位置的距离达到最小.Ruspini 把G od 2o bject 模型扩展为Virt ual 2p roxy 模型,用一个适当大小的球Virt ual 2proxy 代替了点G od 2object ,以避免由于误差引起的G od 2object 点调入裂隙的可能[2].文献[3-4]等给出了由接触点周围的三角片组成的局部模型作为触觉反馈模型.这种缓冲或局部模型是随虚拟设备的移动,动态地在低帧率的视觉循环中由碰撞检测完成[5].1 力的模拟仿真在仿真手术操作的过程中,操作者需要实时感知虚拟手术器械挤压软组织模型的面弹力等反馈信息.实际上的力反馈是体现在操作者感知人体模型对于施加的作用力的反抗作用.由于力反馈要求的带宽高,计算量非常大,因此采用的是基于力反馈器械的质点2弹簧2阻尼器力反馈模型[6],其模型原理如图1所示. 图1 质点2弹簧2阻尼器模型Fig.1 Particle 2spring 2damper model该模型在软组织的表面附着有弹簧与阻尼器,虚拟手术器械模型的顶点一旦与该表面发生碰撞,就会产生弹性形变.通过得到虚拟器械模型的顶点原位置与新位置构成的矢量,可以获得软组织表面的相交接触点,同时也可以得到弹簧拉伸的长度x ,根据该模型的面弹力计算的数学描述为:M x d 2x d t2+D d x d t +Kx =F (t )(1)其中,M 是该软组织面的质量,D 是阻尼系数,K 是弹簧的弹性系数,x 是弹簧缩放的位移,F (t )是某时刻的反馈力.2 碰撞检测与响应碰撞检测是计算力的基础.碰撞检测的实时性、稳定性和精确性将会对后续处理乃至整个手术仿真的性能产生巨大的影响.在鼻咽癌虚拟手术仿真中,使用基于OBB Tree的碰撞检测方法[7].OBB Tree是利用OBB(Oriented bounding boxes)建立的树结构.OBB树的建立过程:首先建立整个曲面的OBB,然后将其分解成2个OBB,并将这2个节点作为该节点的孩子节点,以此类推,直到它的最小单元是不可再分割的OBB,即只含有一个三角形的OBB.在本系统中,我们不仅要判断是否碰撞,还要求返回相应的碰撞信息,包括接触面和该接触面的法向量.根据右手螺旋定律,法向量N的方向可以由两条相交的向量做叉乘积得到.在三角面片中,已知3个顶点v1,v2,v3,则法向量N的计算公式:a=v1v2, b=v3v2,N= a× bN=i j ka1a2a3b1b2b3N(2)在构建出OBB Tree之后,不断遍历树中的每一个节点,找到接触面则返回-1,否则返回1.图2是碰撞检测的流程图.3 力的效果的改进3.1 力的穿刺现象改进由于碰撞检测的不及时,在两个物体接触的一刹那,碰撞检测程序并没有检测出来,从而造成两个物体彼此穿透的现象,叫作穿刺,也叫作穿透.穿刺现象是虚拟手术仿真中要极力避免的.但是由于硬件条件的限制,碰撞检测总会延迟,穿刺现象很难避免.人们为了解决这一问题,除了不断改进碰撞检测的算法,缩短碰撞检测的时间之外,还不断从另外的途径寻求解决或改进此问题的方法.在鼻咽癌虚拟手术仿真中,我们设计了一种二次检测的方法.在此手术仿真中,是虚拟手术设备的点与用于三维头骨显示的三角面片的碰撞检测.当虚拟设备的点Point与面片没有接触时,此时有两种可能的情况:一种是Point在三角面片围成的体的外侧,此时确实没有碰撞;另一种是Point进入到三角面片围成的体的里面,即发生了穿刺现象.此时判断点运动的速 图2 碰撞检测流程图Fig.2 Flow chart of collision detection度方向与面片的法向量方向是否一致,若不一致,取Point前一刻的位置Last Point,判断是否有碰撞,若有,说明此时Point在三维体的内部,已发生了穿刺,而前一刻的位置Last Point本应该有碰撞却没有被检测出来,所以此时输出弹力,阻止Point前进.因为力的线程是1000Hz,大概每隔1ms取一次当前点的位置,所以即使Point已经穿刺,但由于与前一刻的位置间隔很小,可以当成Point还是在面片上,可以延迟输出一个力,并不影响力的真实性输出.图3是二次检测方法的流程图.改进前后的实验结果如表1.因为穿刺的结果与运动的速度有关,当虚拟设备末端点Positio n的运动速度越快,Position与面片接触的时间越短,碰撞检测延迟的可能性越大,造成穿刺的可能性也就越大;反之,则穿刺的可能性越小.因此,在保证Position运动速度一定的前提下,实验的结果才是有效的.实验以10次碰撞为一组,记录了10次碰撞中发生穿刺的次数和10次Po sition速度的平均值,并保证改进前后Po sition速度的变化不大.这样的实验共进行了10组,最后一栏给出了10组总的穿刺次数和速度平均值.由表1中改进前后的对比结果可以看出,改进前的平均碰撞速度144.0mm/s与改进后的平均碰撞速・23・厦门大学学报(自然科学版) 2009年 图3 二次检测流程图Fig.3 Flow chart of double detection表1 改进前后的穿刺次数实验结果对比 Tab.1 Experimental results of puncture number before andafter improvement实验组数改进前穿刺次数碰撞速度/(mm ・s -1)改进后穿刺次数碰撞速度/(mm ・s -1)11131.11156.822156.81155.232143.30141.942142.91151.950136.50139.761143.40140.872150.70152.882137.00144.392144.51151.8100151.70146.8总计14144.04148.2度148.2mm/s 相差很小,可以认为改进前后的平均碰撞速度是一致的.因此,在保证改进前后的平均碰撞速度一致的前提下,我们可以看到改进前100次的碰撞中发生穿刺的次数是14次,而改进后的100次碰撞中发生穿刺的次数是4次,发生穿刺的概率减小了10%.可以求得以穿刺次数为随机变量η的改进前的数学期望E η1和改进后的数学期望E η2:E η1=0×P (η=0)+1×P (η=1)+ 2×P (η=2)=1.4; 图4 力反馈的示意图Fig.4 Sketch map of the force feedbackE η2=0×P (η=0)+1×P (η=1)=0.4.可以看出改进后的穿刺次数的数学期望小于改进前的数学期望,所以可以证明改进后的穿刺效果要好于改进前的效果.3.2 力的稳定性改进在虚拟手术仿真中,触觉刷新帧率非常高,一般在300~1000Hz 之间,而视觉刷新帧率相比之下要低很多,一般要在20Hz 以上,因此,如何在频率相差如此之大的线程之间进行通讯和共享,保证它们协调一致,成为一个很重要的问题.如果线程之间的通讯有延迟的话,会造成力的输出不稳定,在接触点上会有较大幅度的颤动,在鼻咽癌虚拟手术仿真中,我们使用了弹力模型来计算模拟力的输出,由于线程之间频率相差很大,通讯有延迟,结果造成力的输出不稳定.并且因为锚点设置在与面片的接触点上,当虚拟设备末端已经离开接触点时,如图4所示,点Next Position 以速度V 2离开面片时,由于碰撞检测有延迟,仍然会有拉力F 2的产生,而这会使仿真结果不真实.为了解决这个问题,我们采用了Open Hptics TMtoolkit 触觉开发工具箱提供的一种同步机制对该仿真系统进行了改进.如图5所示,我们采用两个分离的但彼此同步的线程:视觉绘制线程和触觉绘制线程,分别实现图形渲染和触觉反馈.触觉线程以1000Hz 左右的频率刷新设备当前位置,计算力的反馈,产生对手的触觉刺激.视觉线程以30Hz 左右的频率捕捉触觉线程产生的设备当前位置,二者之间通过一个共享的同步器共享对象的几何拓扑信息和对象的层次结构,以及设备的运动轨迹等信息.同步机制的运用可以很好的解决视觉线程和触觉线程这种悬殊的刷新频率线程之间彼此如何通讯和信息共享的问题.碰撞检测是在视觉线程中进行的.因为视觉线程的刷新率是30Hz ,因此碰撞检测也是每隔30ms 执行一次.由于在触觉线程中要用到碰撞检测・33・第1期 祖 超等:虚拟手术仿真中的力反馈研究 图5 系统的线程关系Fig.5 Thread relations of the system的结果,因此必须将碰撞检测的结果及时传递给触觉线程.要将检测结果及时传递给刷新率1000Hz 的触觉线程,必须通过同步机制hdScheduleSynchronous ()来在帧率不同的线程中传递信息.图6是力的输出流程图.其中,ioo2是上一刻位置last Po sition 碰撞检测的结果.如图4所示,由于碰撞检测有延迟,在虚拟设备末端点Po sition 离开接触面片时,仍然会有不必要的拉力F 2.因此,我们先判断矢量x 与接触面片法向量normal 的点积是否小于0,如果是,说明Po sition 的运动方向V 2是离开接触面片方向的,此时将弹力F 2设为0,这样就可以避免不必要的拉力产生.我们在XEON CPU 3.20GHz ,2G 内存,NV IDIA Quadro FX4400图形加速卡的计算机上,以美国Sensable 公司的P HAN TOM Desktop 桌面力反馈设备作为触觉反馈的接口,以V T K (Visualization Toolkit )[8]开发工具包和Open Hptics TM toolkit 触觉开发工具箱为开发平台,用面向对象的C ++语言及标准模板库STL ,对上述方法进行实验和测试.图7是鼻咽癌虚拟手术仿真环境.图8是使用P HAN TON 设备时记录的力反馈曲线.由图7我们可以看到,经过改进前的力反馈曲线 图7 鼻咽癌虚拟手术仿真系统Fig.7 Virtual surgery simulation system for nasopha 2ryngeal carcinoma有较大的力的突变,力的输出很不稳定,波动较大,而且图中力的值有负值,说明力的方向有改变,有反方向的拉力存在.改进后的曲线有明显改善,曲线较为平 图6 力的输出流程图Fig.6 Flow chart of force output滑,说明输出的力稳定性较好,而且不存在反方向的拉力. 图8 改进前后的力反馈曲线对比a.改进前的曲线;b.改进后的曲线Fig.8 Contrast between before and after the improve 2ment of the force feedback curves该方法同样还应用在肝癌虚拟手术计划仿真系统中,使得改进后得力的输出更加平稳.图9是肝癌手术计划仿真环境.图10是使用P HAN TON 设备时记录的力反馈曲线4 小 结本文主要针对虚拟手术仿真环境,实现了基于OBB 树结构的碰撞检测和响应.由于数据量很大,碰撞检测会有延时,从而有穿刺现象产生,以及在虚拟器・43・厦门大学学报(自然科学版) 2009年 图9 肝癌虚拟手术仿真Fig.9 Virtual surgery simulation for liver cancer械接触到物体时有振颤的现象,力的输出很不稳定.本文提出了一种二次检测的方法对穿刺现象进行改进,并采用同步机制对力的输出的稳定性进行改进,且都应用在鼻咽癌虚拟手术仿真系统和肝癌虚拟手术仿真系统中.实验结果表明,改进后的算法在穿刺和稳定性方面有了较大的提高,产生穿刺的数学期望大大减小,力反馈输出曲线平滑并没有反方向的力产生,力的输出更加真实,为进一步建立虚拟手术仿真环境奠定了基础.R esearch of Force Feedback T echnology in Virtu al Surgery SimulationZU Chao ,WAN G Bo 2liang 3,MIN Xiao 2ping(School of Information Science and Technology ,Xiamen University ,Xiamen 361005,China )Abstract :Virtual surgery simulation is one of the current forefront topics in the field of international biomedical engineering re 2search.In order to solve the stability and accuracy of force feedback output problems ,the collision detection and response that based on the OBB (oriented Bounding boxes )tree structure were improved ,and then the point of contact location and the vector of contact surface can be returned.On the bases ,a twice detection method was proposed to improve the phenomenon of the force puncture ,and a synchronize mechanism was adopt to improve the stability of the force output.At last ,experimental results show that the improved algorithm has been enhanced in the force puncture and stability of the force so that the force effect is more authentic.K ey w ords :virtualsurgery simulation ;collision detection ;force puncture ;synchronize mechanism .参考文献:[1] Zilles C ,Salisbury J K.A constraint 2based god 2objectmethod for haptic display[C]ΠΠProc IEEE/RS J Int ’1Conf.Washington DC :IEEE CS Press ,1995:146-151.[2] Ruspini D C ,K olarov K ,Khatib O.The haptic display ofcomplex graphical environments [C ]ΠΠProc ACM Sig 2graph.New Y ork ,N Y:ACM Press ,1997:345-352.[3] Mendoza C A ,Laugier C.Realistic haptic renderingfor 图10 改进前后的力反馈曲线对比a.改进前的曲线;b.改进后的曲线Fig.10 Contrast between before and after the improve 2ment of the force feedback curveshighly deformable virtual objects[C ]ΠΠProc IEEE Virtual Reality.Y okohama ,J apan :IEEE ,2001:110-128.[4] Park J G ,Niemeyer G.Haptic rendering with predictiverepresentation of local geometry [C ]ΠΠProc 10th Symposi 2um on Haptic Interfaces for Vertual Environment and Te 2leoperator Systems.Orlando :IEEE ,2002:201-208.[5] 鲍春波,王博亮,戴培山,等.一种支持触觉反馈的膜组织变形仿真方法[J ].系统仿真学报,2007,15(8):463-467.[6] 王勇军,吴鹏,郭光友,等.支持力反馈的鼻腔镜虚拟手术仿真系统[J ].系统仿真学报,2001,13(3):404-407.[7] 章勤,黄馄,李光明.一种基于OBB 的碰撞检测算法的改进[J ].华中科技大学学报,2003,31(1):89-94.[8] 王延华,洪飞,吴恩华,等.基于V T K 库的医学图像处理子系统设计和实现[J ].计算机工程与应用,2003(8):205-207.・53・第1期 祖 超等:虚拟手术仿真中的力反馈研究。

《虚拟手术中软组织建模与力反馈算法研究》篇一一、引言随着现代医学技术的飞速发展,虚拟手术技术在医疗领域的应用越来越广泛。
其中,软组织建模与力反馈算法作为虚拟手术中的关键技术,对于提高手术模拟的真实感和精确度具有重要意义。
本文旨在研究虚拟手术中软组织建模与力反馈算法的原理、方法及实践应用,为提高手术模拟技术的准确性和效率提供理论依据和技术支持。
二、软组织建模技术的研究1. 软组织建模的基本原理软组织建模是虚拟手术中的重要环节,它通过对人体组织结构进行三维重建,实现对软组织形态的模拟。
该过程涉及到几何学、力学、计算机图形学等多个领域的知识。
目前,常见的软组织建模方法包括基于物理的建模方法和基于医学影像数据的建模方法。
2. 基于物理的软组织建模方法基于物理的软组织建模方法主要是通过构建软组织材料模型,模拟软组织的物理特性和力学行为。
该方法能够较好地反映软组织的弹性和可变形性,但计算复杂度较高,对硬件设备要求较高。
3. 基于医学影像数据的软组织建模方法基于医学影像数据的软组织建模方法主要是通过将医学影像数据转化为三维模型,实现对软组织的模拟。
该方法具有数据来源广泛、易于获取等优点,但需要对影像数据进行预处理和配准等操作,处理过程较为复杂。
三、力反馈算法的研究1. 力反馈算法的基本原理力反馈算法是虚拟手术中的关键技术之一,它通过模拟手术过程中的力和触感,使医生在操作虚拟手术器械时能够获得真实的触觉体验。
该算法主要涉及到传感器技术、信号处理和计算机控制等多个领域的知识。
2. 常见的力反馈算法常见的力反馈算法包括基于弹簧模型的力反馈算法和基于物理引擎的力反馈算法等。
其中,基于弹簧模型的力反馈算法通过构建虚拟手术器械与软组织之间的相互作用关系,模拟手术过程中的力和触感;而基于物理引擎的力反馈算法则通过引入物理引擎,实现对手术过程中力和运动的实时计算和模拟。
3. 改进的力反馈算法研究针对传统力反馈算法存在的计算复杂度高、实时性差等问题,本文提出了一种改进的力反馈算法。
《虚拟手术中软组织建模与力反馈算法研究》篇一一、引言随着计算机技术的飞速发展,虚拟手术仿真系统在医学、生物工程等领域的应用越来越广泛。
其中,软组织建模与力反馈算法作为虚拟手术仿真的核心技术,对于提高手术仿真系统的真实感和操作体验具有重要意义。
本文旨在研究虚拟手术中软组织建模与力反馈算法,为提高虚拟手术仿真的效果提供理论支持和技术手段。
二、软组织建模技术研究1. 建模方法概述软组织建模是虚拟手术仿真的基础,其关键在于准确描述软组织的物理特性和生物力学行为。
目前,常用的软组织建模方法包括基于物理的建模方法和基于医学图像的建模方法。
基于物理的建模方法通过构建数学模型来描述软组织的力学特性,如弹性、塑性等;而基于医学图像的建模方法则通过医学影像数据来构建软组织的三维模型。
2. 模型精度与计算效率的平衡在软组织建模过程中,模型精度和计算效率是一对重要的矛盾。
为了提高仿真系统的真实感,需要构建高精度的软组织模型,但这往往会导致计算量大幅增加,影响仿真系统的实时性。
因此,需要在保证一定精度的基础上,通过优化算法和减少计算量来提高仿真系统的计算效率。
三、力反馈算法研究1. 力反馈算法的基本原理力反馈算法是虚拟手术仿真系统中的重要组成部分,它通过模拟手术操作过程中手术器械与软组织之间的相互作用力,将操作信息实时反馈给操作者。
力反馈算法的基本原理包括力学分析、传感器信号处理和力反馈控制等环节。
2. 算法的优化与改进为了提高力反馈算法的准确性和实时性,需要对算法进行优化和改进。
一方面,可以通过引入更先进的力学模型和传感器技术来提高算法的准确性;另一方面,可以通过优化算法结构和减少计算量来提高算法的实时性。
此外,还需要考虑算法的鲁棒性和适应性,以适应不同手术操作和不同患者的情况。
四、实验与分析为了验证软组织建模与力反馈算法的有效性,我们进行了大量的实验和分析。
首先,我们构建了高精度的软组织模型,并通过医学影像数据进行了验证。
可变虚拟刚度优化的医学手术触觉仿真系统引言随着医学手术的快速发展,对医生技术的要求越来越高。
然而,在许多手术中,医生需要依赖于触觉来判断组织的硬度、粘性等特性。
为了提高手术结果的准确性和安全性,发展具有可变虚拟刚度的医学手术触觉仿真系统变得至关重要。
可变虚拟刚度优化的医学手术触觉仿真系统是一种能够模拟不同组织刚度和力学性质的系统。
通过这种系统,医生能够在仿真环境中感受到真实组织的硬度、黏度等特性,从而能够更好地理解和判断组织的特性,提高手术的准确性。
系统设计与实现系统的设计是基于虚拟现实技术和力反馈技术的。
首先,通过虚拟现实技术创建一个真实的手术场景,包括手术器械、人体解剖模型等。
然后,通过力反馈技术将手术器械与仿真系统连接起来,使医生能够感受到组织的触感。
系统中的关键技术是可变虚拟刚度优化算法。
这个算法能够根据医生手术的需求,实时调整仿真系统中组织的刚度。
这样,医生可以在仿真环境中感受到不同组织的硬度,并根据手感来判断手术操作是否正确。
为了实现这一算法,我们需要建立真实组织的物理模型,并对其力学性质进行建模。
通过对组织的材料属性、力学参数等进行实验测量和研究,可以建立准确的组织力学模型。
然后,通过在仿真系统中植入这些模型,可以实现不同组织刚度的仿真。
在系统的实现过程中,还需要考虑人机交互和操作界面的设计。
通过合理设计的界面,医生能够方便地控制仿真系统的设置,包括刚度的调整、手术场景的选择等。
同时,界面也需要提供实时的反馈信息,让医生能够及时了解手术的进程和结果。
实验与评估为了验证系统的可行性和效果,我们可以进行一系列实验和评估。
首先,通过将真实组织和仿真组织进行对比,可以评估系统在模拟组织刚度方面的准确性。
通过在仿真系统中进行一系列手术操作的训练和测试,可以评估系统在提高医生技术水平方面的效果。
此外,还可以邀请一些专业医生和学生参与实验,收集他们对系统的反馈和意见。
通过医生的评价,可以进一步改进系统的设计和功能,以提高系统的实用性和适用性。
第48卷 第1期厦门大学学报(自然科学版)V ol .48 N o .1 2009年1月Journal of Xiamen University (Natural Science )Jan .2009 虚拟手术仿真中的力反馈研究祖 超,王博亮*,闵小平(厦门大学信息科学与技术学院,福建厦门361005)收稿日期:2008-06-23基金项目:国家自然科学基金(60371012),福建省科技重点项目(2004Y008)资助*通讯作者:blwang @xmu .edu .cn摘要:虚拟手术仿真是当前国际上生物医学工程领域研究的前沿课题.为了解决仿真中力反馈输出的稳定性和准确性问题,本文首先对基于O BB (O riented bo unding box es )树结构的碰撞检测和响应进行了改进,改进后可以返回接触点位置和接触面的法向量.在此基础上,提出了一种二次检测的方法,大大减少了穿刺现象的产生;并采用同步机制对力的输出的稳定性进行改进,使力的输出更加稳定准确.最后的实验结果表明,改进后的算法在解决穿刺和稳定性方面有了较大的提高,使手术仿真中力的输出效果更加真实.关键词:虚拟手术仿真;碰撞检测;穿刺现象;同步机制中图分类号:T P 391.9 文献标识码:A 文章编号:0438-0479(2009)01-0031-05 虚拟手术仿真是当前国际上生物医学工程领域研究的前沿课题.人们可以运用手术仿真和导航等技术实现复杂的医学解剖体数据的三维可视化,还可对可视化的数据进行实时操作,从而建立可供术前规划使用的虚拟环境.虚拟手术仿真系统除在视觉上给使用者营造一种沉浸感、真实感之外,还要提供一种触觉反馈机制,使人们在看见虚拟对象的同时,还可以触摸到它的几何形状和物理特征.视觉和触觉的有机结合使虚拟现实、虚拟仿真更加真实可信.在虚拟手术中,引入触觉反馈,可以使医生训练时感受到与虚拟对象交互产生的触觉和力,这样无疑可以使训练更真实、准确,具有身临其境的沉浸感.按照虚拟设备与虚拟对象接触的范围不同,触觉反馈分为点接触、线接触和面接触3种方式.点接触只有3个自由度,线接触和面接触有6个自由度.Zilles 和Salisbury 提出了基于点的触觉反馈仿真的God -object 模型[1].G od -object 是虚拟设备被约束在虚拟对象表面上的一个理想约束点,它随虚拟设备末端位置的改变沿虚拟物体表面滑动,在某一时刻能量达到最小的点,该点到设备实际位置的距离达到最小.Ruspini 把Go d -o bject 模型扩展为Virtual -prox y 模型,用一个适当大小的球Virtual -prox y 代替了点Go d -object ,以避免由于误差引起的God -object 点调入裂隙的可能[2].文献[3-4]等给出了由接触点周围的三角片组成的局部模型作为触觉反馈模型.这种缓冲或局部模型是随虚拟设备的移动,动态地在低帧率的视觉循环中由碰撞检测完成[5].1 力的模拟仿真在仿真手术操作的过程中,操作者需要实时感知虚拟手术器械挤压软组织模型的面弹力等反馈信息.实际上的力反馈是体现在操作者感知人体模型对于施加的作用力的反抗作用.由于力反馈要求的带宽高,计算量非常大,因此采用的是基于力反馈器械的质点-弹簧-阻尼器力反馈模型[6],其模型原理如图1所示. 图1 质点-弹簧-阻尼器模型F ig .1 Par ticle -spring -damper mo del该模型在软组织的表面附着有弹簧与阻尼器,虚拟手术器械模型的顶点一旦与该表面发生碰撞,就会产生弹性形变.通过得到虚拟器械模型的顶点原位置与新位置构成的矢量,可以获得软组织表面的相交接触点,同时也可以得到弹簧拉伸的长度x ,根据该模型的面弹力计算的数学描述为:Mx d 2x d t2+D d x d t +Kx =F (t )(1)其中,M 是该软组织面的质量,D 是阻尼系数,K 是弹簧的弹性系数,x 是弹簧缩放的位移,F (t )是某时刻的反馈力.2 碰撞检测与响应碰撞检测是计算力的基础.碰撞检测的实时性、稳定性和精确性将会对后续处理乃至整个手术仿真的性能产生巨大的影响.在鼻咽癌虚拟手术仿真中,使用基于OBBTree 的碰撞检测方法[7].OBBT ree 是利用OBB (Orientedbo unding bo xes )建立的树结构.OBB 树的建立过程:首先建立整个曲面的OBB ,然后将其分解成2个OBB ,并将这2个节点作为该节点的孩子节点,以此类推,直到它的最小单元是不可再分割的OBB ,即只含有一个三角形的OBB .在本系统中,我们不仅要判断是否碰撞,还要求返回相应的碰撞信息,包括接触面和该接触面的法向量.根据右手螺旋定律,法向量N 的方向可以由两条相交的向量做叉乘积得到.在三角面片中,已知3个顶点v 1,v 2,v 3,则法向量N 的计算公式:a =v 1v 2,b =v 3v 2,N = a × b N=ij k a 1a 2a 3b 1b 2b 3N(2)在构建出OBBT ree 之后,不断遍历树中的每一个节点,找到接触面则返回-1,否则返回1.图2是碰撞检测的流程图.3 力的效果的改进3.1 力的穿刺现象改进由于碰撞检测的不及时,在两个物体接触的一刹那,碰撞检测程序并没有检测出来,从而造成两个物体彼此穿透的现象,叫作穿刺,也叫作穿透.穿刺现象是虚拟手术仿真中要极力避免的.但是由于硬件条件的限制,碰撞检测总会延迟,穿刺现象很难避免.人们为了解决这一问题,除了不断改进碰撞检测的算法,缩短碰撞检测的时间之外,还不断从另外的途径寻求解决或改进此问题的方法.在鼻咽癌虚拟手术仿真中,我们设计了一种二次检测的方法.在此手术仿真中,是虚拟手术设备的点与用于三维头骨显示的三角面片的碰撞检测.当虚拟设备的点Point 与面片没有接触时,此时有两种可能的情况:一种是Point 在三角面片围成的体的外侧,此时确实没有碰撞;另一种是Point 进入到三角面片围成的体的里面,即发生了穿刺现象.此时判断点运动的速 图2 碰撞检测流程图F ig .2 Flow char t of collision detectio n度方向与面片的法向量方向是否一致,若不一致,取Point 前一刻的位置LastPoint ,判断是否有碰撞,若有,说明此时Point 在三维体的内部,已发生了穿刺,而前一刻的位置LastPoint 本应该有碰撞却没有被检测出来,所以此时输出弹力,阻止Point 前进.因为力的线程是1000H z ,大概每隔1m s 取一次当前点的位置,所以即使Point 已经穿刺,但由于与前一刻的位置间隔很小,可以当成Point 还是在面片上,可以延迟输出一个力,并不影响力的真实性输出.图3是二次检测方法的流程图.改进前后的实验结果如表1.因为穿刺的结果与运动的速度有关,当虚拟设备末端点Po sitio n 的运动速度越快,Po sitio n 与面片接触的时间越短,碰撞检测延迟的可能性越大,造成穿刺的可能性也就越大;反之,则穿刺的可能性越小.因此,在保证Po sitio n 运动速度一定的前提下,实验的结果才是有效的.实验以10次碰撞为一组,记录了10次碰撞中发生穿刺的次数和10次Position 速度的平均值,并保证改进前后Po sitio n 速度的变化不大.这样的实验共进行了10组,最后一栏给出了10组总的穿刺次数和速度平均值.由表1中改进前后的对比结果可以看出,改进前的平均碰撞速度144.0m m /s 与改进后的平均碰撞速·32·厦门大学学报(自然科学版) 2009年 图3 二次检测流程图F ig .3 Flow char t of double detectio n表1 改进前后的穿刺次数实验结果对比 T ab .1 Experimental results of puncture numbe r befo re a ndaf ter impro vement实验组数改进前穿刺次数碰撞速度/(mm ·s -1)改进后穿刺次数碰撞速度/(mm ·s -1)11131.11156.822156.81155.232143.30141.942142.91151.950136.50139.761143.40140.872150.70152.882137.00144.392144.51151.8100151.70146.8总计14144.04148.2度148.2m m /s 相差很小,可以认为改进前后的平均碰撞速度是一致的.因此,在保证改进前后的平均碰撞速度一致的前提下,我们可以看到改进前100次的碰撞中发生穿刺的次数是14次,而改进后的100次碰撞中发生穿刺的次数是4次,发生穿刺的概率减小了10%.可以求得以穿刺次数为随机变量η的改进前的数学期望E η1和改进后的数学期望E η2:E η1=0×P (η=0)+1×P (η=1)+ 2×P (η=2)=1.4; 图4 力反馈的示意图F ig .4 Sketch map o f the fo rce feedbackE η2=0×P (η=0)+1×P (η=1)=0.4.可以看出改进后的穿刺次数的数学期望小于改进前的数学期望,所以可以证明改进后的穿刺效果要好于改进前的效果.3.2 力的稳定性改进在虚拟手术仿真中,触觉刷新帧率非常高,一般在300~1000H z 之间,而视觉刷新帧率相比之下要低很多,一般要在20H z 以上,因此,如何在频率相差如此之大的线程之间进行通讯和共享,保证它们协调一致,成为一个很重要的问题.如果线程之间的通讯有延迟的话,会造成力的输出不稳定,在接触点上会有较大幅度的颤动,在鼻咽癌虚拟手术仿真中,我们使用了弹力模型来计算模拟力的输出,由于线程之间频率相差很大,通讯有延迟,结果造成力的输出不稳定.并且因为锚点设置在与面片的接触点上,当虚拟设备末端已经离开接触点时,如图4所示,点Nex tPosition 以速度V 2离开面片时,由于碰撞检测有延迟,仍然会有拉力F 2的产生,而这会使仿真结果不真实.为了解决这个问题,我们采用了OpenH ptics TMto olkit 触觉开发工具箱提供的一种同步机制对该仿真系统进行了改进.如图5所示,我们采用两个分离的但彼此同步的线程:视觉绘制线程和触觉绘制线程,分别实现图形渲染和触觉反馈.触觉线程以1000H z 左右的频率刷新设备当前位置,计算力的反馈,产生对手的触觉刺激.视觉线程以30H z 左右的频率捕捉触觉线程产生的设备当前位置,二者之间通过一个共享的同步器共享对象的几何拓扑信息和对象的层次结构,以及设备的运动轨迹等信息.同步机制的运用可以很好的解决视觉线程和触觉线程这种悬殊的刷新频率线程之间彼此如何通讯和信息共享的问题.碰撞检测是在视觉线程中进行的.因为视觉线程的刷新率是30Hz ,因此碰撞检测也是每隔30ms 执行一次.由于在触觉线程中要用到碰撞检测·33·第1期 祖 超等:虚拟手术仿真中的力反馈研究 图5 系统的线程关系F ig .5 T hread rela tions of the system的结果,因此必须将碰撞检测的结果及时传递给触觉线程.要将检测结果及时传递给刷新率1000Hz 的触觉线程,必须通过同步机制hdScheduleSynchronous ()来在帧率不同的线程中传递信息.图6是力的输出流程图.其中,ioo2是上一刻位置lastPo sitio n 碰撞检测的结果.如图4所示,由于碰撞检测有延迟,在虚拟设备末端点Po sition 离开接触面片时,仍然会有不必要的拉力F 2.因此,我们先判断矢量x 与接触面片法向量no rmal 的点积是否小于0,如果是,说明Po sition 的运动方向V 2是离开接触面片方向的,此时将弹力F 2设为0,这样就可以避免不必要的拉力产生.我们在XEON CPU 3.20GH z ,2G 内存,NVIDIA Quadro FX4400图形加速卡的计算机上,以美国Sensable 公司的PH AN TOM Desktop 桌面力反馈设备作为触觉反馈的接口,以V TK (Visualization Too lkit )[8]开发工具包和OpenH ptics TMtoolkit 触觉开发工具箱为开发平台,用面向对象的C ++语言及标准模板库STL ,对上述方法进行实验和测试.图7是鼻咽癌虚拟手术仿真环境.图8是使用PH AN TON 设备时记录的力反馈曲线.由图7我们可以看到,经过改进前的力反馈曲线 图7 鼻咽癌虚拟手术仿真系统F ig .7 V irtual surg ery simulation sy stem fo r naso pha -ry ngeal ca rcinoma有较大的力的突变,力的输出很不稳定,波动较大,而且图中力的值有负值,说明力的方向有改变,有反方向的拉力存在.改进后的曲线有明显改善,曲线较为平 图6 力的输出流程图F ig .6 Flow char t of fo rce output滑,说明输出的力稳定性较好,而且不存在反方向的拉力. 图8 改进前后的力反馈曲线对比a .改进前的曲线;b .改进后的曲线F ig .8 Co ntrast be tw een befo re and after the im pr ove -ment of the fo rce feedback curve s该方法同样还应用在肝癌虚拟手术计划仿真系统中,使得改进后得力的输出更加平稳.图9是肝癌手术计划仿真环境.图10是使用PH AN TON 设备时记录的力反馈曲线4 小 结本文主要针对虚拟手术仿真环境,实现了基于OBB 树结构的碰撞检测和响应.由于数据量很大,碰撞检测会有延时,从而有穿刺现象产生,以及在虚拟器·34·厦门大学学报(自然科学版) 2009年 图9 肝癌虚拟手术仿真F ig .9 Virtual surg ery simulation for liv er cancer械接触到物体时有振颤的现象,力的输出很不稳定.本文提出了一种二次检测的方法对穿刺现象进行改进,并采用同步机制对力的输出的稳定性进行改进,且都应用在鼻咽癌虚拟手术仿真系统和肝癌虚拟手术仿真系统中.实验结果表明,改进后的算法在穿刺和稳定性方面有了较大的提高,产生穿刺的数学期望大大减小,力反馈输出曲线平滑并没有反方向的力产生,力的输出更加真实,为进一步建立虚拟手术仿真环境奠定了基础.Research of Force Feedback Technology in Virtual Surgery SimulationZU Chao ,WANG Bo -liang *,M IN Xiao -ping(Scho ol of Infor mation Science and T echnology ,X iamen U niver sity ,X iamen 361005,China )A bstract :Vir tual sur gerysimulation is one of the current fo refro nt topics in the field of inte rnational biomedical enginee ring re -search .I n o rder to so lve the stability a nd accuracy of fo rce feedback output problems ,the collision de tectio n and response tha t ba sed on the O BB (o riented Bounding bo xes )tree structure we re impro ved ,and then the point of contact locatio n and the vecto r of contact sur face can be returned .On the bases ,a tw ice detection metho d w as pro po sed to improv e the pheno meno n of the fo rce punc ture ,and a sy nchr onize mechanism was ado pt to impr ove the stability of the fo rce o utput .A t last ,experimental r esults sho w tha t the impro ved alg orithm ha s been enhanced in the fo rce puncture and stability o f the fo rce so that the for ce effect is mo re authentic .Key words :virtual surg erysimulatio n ;collision detectio n ;for ce puncture ;sy nchr onize mechanism .参考文献:[1] Zille s C ,Salisbury J K .A co nstr aint -based go d -o bjectmethod fo r haptic display [C ] P roc I EEE /RSJ Int '1Co nf .Wa shing ton DC :IEEE CS P ress ,1995:146-151.[2] Ruspini D C ,Ko lar ov K ,K hatib O .T he haptic display o fcomplex gr aphical enviro nments [C ] Pro c ACM Sig -g raph .New Y ork ,N Y :ACM P ress ,1997:345-352.[3] M endo za C A ,Laugie r C .Realistic haptic re nderingfor 图10 改进前后的力反馈曲线对比a .改进前的曲线;b .改进后的曲线F ig .10 Contr ast be tw een befo re and after the im pr ove -ment of the for ce feedback cur veshig hly defo rmable vir tual o bjects [C ] P roc IEEE Vir tual Reality .Y okohama ,Japan :IEEE ,2001:110-128.[4] Par k J G ,Niemey er G .Ha ptic r endering with predictiv erepre sentatio n o f local geo metry [C ] P roc 10th Sy mposi -um o n H aptic Interfaces for V ertual Environment and T e -leo per ator Sy stems .O rlando :I EEE ,2002:201-208.[5] 鲍春波,王博亮,戴培山,等.一种支持触觉反馈的膜组织变形仿真方法[J ].系统仿真学报,2007,15(8):463-467.[6] 王勇军,吴鹏,郭光友,等.支持力反馈的鼻腔镜虚拟手术仿真系统[J ].系统仿真学报,2001,13(3):404-407.[7] 章勤,黄馄,李光明.一种基于O BB 的碰撞检测算法的改进[J ].华中科技大学学报,2003,31(1):89-94.[8] 王延华,洪飞,吴恩华,等.基于V T K 库的医学图像处理子系统设计和实现[J ].计算机工程与应用,2003(8):205-207.·35·第1期 祖 超等:虚拟手术仿真中的力反馈研究。