乐高超声波传感器
- 格式:pps
- 大小:5.55 MB
- 文档页数:11

乐高机械机器人知识点总结一、硬件构成乐高机械机器人包括中控模块、传感器、电机和乐高积木。
中控模块是机器人的大脑,可以控制机器人的运动和行为。
传感器可以用来感知机器人周围的环境,包括触摸传感器、颜色传感器和超声波传感器等。
电机则用来驱动机器人的运动,包括轮式电机和舵机。
而乐高积木则是搭建机器人外形的材料,可以按照自己想象的方式进行组合。
二、软件编程乐高机械机器人可以通过编程来控制其运动和行为。
乐高公司提供了Mindstorms EV3软件来帮助孩子们学习编程。
该软件采用了图形化编程的方式,让孩子们可以通过拖拽不同的模块来组合成各种不同的程序。
代码块的方式让编程更加直观和易学,即使是小小年纪的孩子也能轻松上手。
三、机器人应用乐高机械机器人可以应用于各种教育和娱乐场景。
在教育方面,它可以帮助孩子们学习科学、技术、工程和数学知识,培养他们的创造力和逻辑思维能力。
机器人编程也可以作为一个趣味教学的方式,激发孩子们对学习的兴趣。
而在娱乐方面,乐高机械机器人可以搭建成各种形态的机器人,让孩子们尽情发挥自己的想象力。
四、机械原理乐高机械机器人涉及到了一些基本的机械原理,比如齿轮传动、杠杆原理等。
孩子们在搭建和编程过程中可以学习到这些原理,并且亲身体验到它们的应用。
乐高公司也推出了一些相关的教育教材,帮助孩子们更深入地理解这些原理。
五、创意与设计乐高机械机器人的搭建过程是一个很好的创意和设计的实践平台。
孩子们可以自己设计机器人的外形和结构,根据自己的想法进行搭建。
他们可以通过尝试不同的方法和结构来优化机器人的功能和性能,这对于培养孩子们的创造力和设计思维有着很大的帮助。
总的来说,乐高机械机器人是一个很不错的教育工具,它结合了机器人科技和乐高积木的乐趣,为孩子们提供了一个全方位的学习平台。
通过搭建和编程机器人,孩子们可以学到很多有用的知识,并且培养自己的创造力和解决问题的能力。
希望更多的孩子们能够通过乐高机械机器人带来的乐趣和启发,从中受益。

乐高说明书目录第一部分课程总览 .................................. 第二部分综合实验 .................................. Lab1 光电传感器自动跟踪小车 ........................ Lab 光电传感器测距功能测试 ........................ Lab 光电传感器位移传感应用 ........................ Lab 超声波传感器测试 ............................. 10 Lab 超声波传感器位移传感应用 (12)第三部分创新实验a) b) c) d)双轮自平衡机器人;碰触传感机器人设计;寻线机器人的仿真和建模及实例;自己提出一个合理的项目第一部分课程总览1.目的与意义提倡“素质教育”、全面培养和提高学生的创新以及综合设计能力是当前高等工科院校实验教学改革的主要目标之一。
为适应素质教育的要求,高等工科院校的实验课程正经历着从“单一型”“验证型”向“设计型”“开放型”的变革过程。
我院测试及控制类课程《电工电子技术》《测试技术》《微机原理及接口技术》等课程涵盖了机械设备及加工过程测试控制相关的电子电路、传感器、信号处理、接口、控制原理、测控计算机软件等理论及技术,具有综合性、实践性强的特点,但目前各课程的实验教学存在着孤立、分散、缺乏系统性的问题。
为促进机械工程学科学生对于计算机测控技术的工程创新设计能力、促进相关理论知识的理解和灵活应用,本机电一体化创新综合实验以丹麦乐高公司教育部开发的积木式教学组件-智力风暴为基础进行。
采用LEGO MINDSTORMS 为基础建立开放型创新实验室,并根据我院测试及控制类课程《电工电子技术》《测试技术》《微机原理及接口技术》等课程设计多层次的综合创新实验设计项目,具有技术综合性和趣味性以及挑战性,能有效激发学生的学习兴趣,使学生在实践项目的过程中激发和强化他们的创造力、动手能力、协作能力、综合能力和进取精神;可使学生在实施项目的过程中对材料、机械、电子、计算机硬件、软件均有直观的认知并掌握机械工程测试与控制的综合分析设计能力。

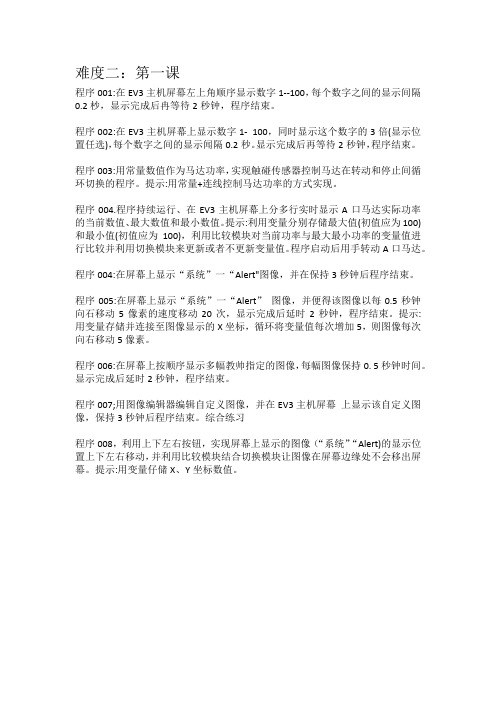
程序001:在EV3主机屏幕左上角顺序显示数字1--100,每个数字之间的显示间隔0.2杪,显示完成后冉等待2秒钟,程序结束。
程序002:在EV3主机屏幕上显示数字1- 100,同时显示这个数字的3倍(显示位置任选),每个数字之间的显示闻隔0.2秒。
显示完成后再等待2秒钟,程序结束。
程序003:用常量数值作为马达功率,实现触碰传感器控制马达在转动和停止间循环切换的程序。
提示:用常量+连线控制马达功率的方式实现。
程序004.程序持续运行、在EV3主机屏幕上分多行实时显示A口马达实际功率的当前数值、最大数值和最小数值。
提示:利用变量分别存储最大值(初值应为100)和最小值(初值应为100),利用比较模块对当前功率与最大最小功率的变量值进行比较并利用切换模块来更新或者不更新变量值。
程序启动后用手转动A口马达。
程序004:在屏幕上显示“系统”一“Alert"图像,并在保持3秒钟后程序结束。
程序005:在屏幕上显示“系统”一“Alert”图像,并便得该图像以每0.5秒钟向石移动5像素的速度移动20次,显示完成后延时2秒钟,程序结束。
提示:用变量存储并连接至图像显示的X坐标,循环将变量值每次增加5,则图像每次向右移动5像素。
程序006:在屏幕上按顺序显示多幅教帅指定的图像,每幅图像保持0. 5秒钟时间。
显示完成后延时2秒钟,程序结束。
程序007;用图像编辑器编辑自定义图像,并在EV3主机屏幕上显示该自定义图像,保持3秒钟后程序结束。
综合练习程序008,利用上下左右按钮,实现屏幕上显示的图像(“系统”“Alert)的显示位置上下左右移动,并利用比较模块结合切换模块让图像在屏幕边缘处不会移出屏幕。
提示:用变量仔储X、Y坐标数值。
程序001在屏幕上同时显示三行文本,"One”、“Two" 和"Thre",其中“Two"以反白方式显示。
提示,网格模式、y坐标取值、清除屏幕标志和反白显示标志。

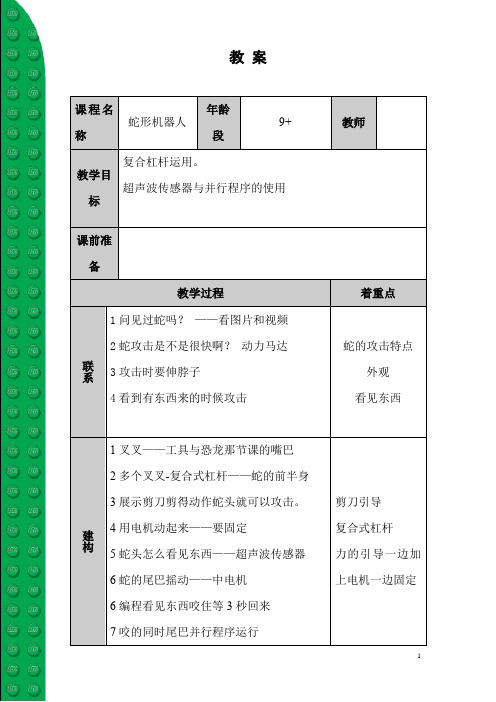
教 案
课
程名称 蛇形机器人 年龄
段
9+ 教师
教学目
标
复合杠杆运用。
超声波传感器与并行程序的使用
课前准
备
教学过程 着重点
联系
1问见过蛇吗? ——看图片和视频
2蛇攻击是不是很快啊? 动力马达 3攻击时要伸脖子 4看到有东西来的时候攻击
蛇的攻击特点 外观 看见东西 建构 1叉叉——工具与恐龙那节课的嘴巴
2多个叉叉-复合式杠杆——蛇的前半身
3展示剪刀剪得动作蛇头就可以攻击。
4用电机动起来——要固定 5蛇头怎么看见东西——超声波传感器 6蛇的尾巴摇动——中电机 6编程看见东西咬住等3秒回来
7咬的同时尾巴并行程序运行
剪刀引导 复合式杠杆 力的引导一边加
上电机一边固定。
4x指针,3单位,白色 41739418x带轮轴的连接销,2单位,米黄色 46665796x连接销,3单位,米黄色 451455410x轮轴,2单位,红色 414286522x带轴套的连接销,3单位,红色 414080620x带摩擦/轮轴的连接销,2单位,蓝色 420648230x带摩擦的连接销,3单位,蓝色 45145534239601603182110x轴套,1单位,灰色 421162260x带摩擦的连接销,2单位,黑色 412171510x连接销,2单位,灰色 42118072x带末端的轮轴,4单位,深灰色 45601772x带末端的轮轴,8单位,深灰色 44998586x轮轴,5单位,灰色 42116395x轮轴,7单位,灰色 14x轮轴,3单位,灰色 42118152x轮轴,9单位,灰色 45357682x轮轴,8单位,黑色 370726单位,黑色 轮轴,12单位,黑色 3708264x轮轴,4单位,黑色 3705264x轮轴,6单位,黑色 3706264xT 形梁,3x3单位,黑色 4552347梁,3单位,黑色 41428224x角梁,4x6单位,黑色 41122824x角梁,3x5单位,白色45850404x双角梁,3x7单位,白色 44954124x梁,3单位,红色 41537186x角梁,2x4单位,红色 41412704x梁,3单位,蓝色 45093764x梁,3单位,黄色 41537076x梁,15单位,白色 45425784x梁,3单位,绿色 60079733x框架,5x7单位,灰色 45398801x框架,5x11单位,灰色 45407972x角梁,3x5单位,灰色 42117134x梁,5单位,灰色 42116514x角梁,3x7单位,灰色 42116244x梁,7单位,灰色 44959306x梁,9单位,灰色 42118664x梁,11单位,灰色 46117056x梁,13单位,灰色 45229342x带手柄的连接销,3单位,黑色 45630442x交叉梁,2x1单位,红色 60085274x½ 三角梁,5x3单位,灰色 60090196x交叉块,3x2单位,灰色 45380076x双连接销,3x3单位,灰色 42250338x交叉块,2单位,灰色 42117754x带角连接销, 3x3单位,灰色 42960598x交叉块,3单位,深灰色 42108578x双交叉块,3单位,黑色 41216674x交叉块叉,2x2单位,黑色 41628572x½ 梁,4单位,黑色 41422364x角块 2,180º,黑色 41077832x角块,6(90º),黑色 41077674x带十字孔的橡胶梁,2单位,黑色 41983672x3轮辐角块,3x120º,灰色 45025954x管子,2单位,灰色 45269854x齿轮,8齿,深灰色 45145594x齿轮,24齿,深灰色 45145584x齿轮,16齿,灰色 46405362x锥齿轮,12齿,米黄色 45654526x套管/轮轴延长器,2单位,红色 45131742x转台底,28齿规格,灰色46522352x蜗轮,灰色42115102x转台顶,28齿规格,黑色46522364x齿轮,4齿,黑色42482042x低轮胎,56x28 mm,黑色60353644x轮胎,30.4x4 mm,黑色60280411x钢球,金属银60239561x球座,深灰色46103804x轮毂,24x4 mm,深灰色458727554x轨道,5x1.5单位,黑色60146481x右弯面板,3x5单位,黑色45662491x左弯面板,3x5单位,黑色45662511x右弯面板,5x11单位,黑色45434901x左弯面板,5x11单位,黑色45413262x双锥齿轮,12齿,黑色41774312x双锥齿轮,20齿,黑色41774302x双锥齿轮,36齿,黑色42555631x陀螺仪传感器 60089161x超声波传感器 60089241x颜色传感器 60089192x触动传感器 60084721x中型电机 60085771x可充电电池 60128202x大型电机 60094301xEv3 控制器 60099961xUSB 电线 60369012x电线,35 cm/14 in. 60245831x电线,50 cm/20 in. 6024585。
4x指针,3单位,白色 41739418x带轮轴的连接销,2单位,米黄色 46665796x连接销,3单位,米黄色 451455410x轮轴,2单位,红色 414286522x带轴套的连接销,3单位,红色 414080620x带摩擦/轮轴的连接销,2单位,蓝色 420648230x带摩擦的连接销,3单位,蓝色 45145534239601603182110x轴套,1单位,灰色 421162260x带摩擦的连接销,2单位,黑色 412171510x连接销,2单位,灰色 42118072x带末端的轮轴,4单位,深灰色 45601772x带末端的轮轴,8单位,深灰色 44998586x轮轴,5单位,灰色 42116395x轮轴,7单位,灰色 14x轮轴,3单位,灰色 42118152x轮轴,9单位,灰色 45357682x轮轴,8单位,黑色 370726单位,黑色 轮轴,12单位,黑色 3708264x轮轴,4单位,黑色 3705264x轮轴,6单位,黑色 3706264xT 形梁,3x3单位,黑色 4552347梁,3单位,黑色 41428224x角梁,4x6单位,黑色 41122824x角梁,3x5单位,白色45850404x双角梁,3x7单位,白色 44954124x梁,3单位,红色 41537186x角梁,2x4单位,红色 41412704x梁,3单位,蓝色 45093764x梁,3单位,黄色 41537076x梁,15单位,白色 45425784x梁,3单位,绿色 60079733x框架,5x7单位,灰色 45398801x框架,5x11单位,灰色 45407972x角梁,3x5单位,灰色 42117134x梁,5单位,灰色 42116514x角梁,3x7单位,灰色 42116244x梁,7单位,灰色 44959306x梁,9单位,灰色 42118664x梁,11单位,灰色 46117056x梁,13单位,灰色 45229342x带手柄的连接销,3单位,黑色 45630442x交叉梁,2x1单位,红色 60085274x½ 三角梁,5x3单位,灰色 60090196x交叉块,3x2单位,灰色 45380076x双连接销,3x3单位,灰色 42250338x交叉块,2单位,灰色 42117754x带角连接销, 3x3单位,灰色 42960598x交叉块,3单位,深灰色 42108578x双交叉块,3单位,黑色 41216674x交叉块叉,2x2单位,黑色 41628572x½ 梁,4单位,黑色 41422364x角块 2,180º,黑色 41077832x角块,6(90º),黑色 41077674x带十字孔的橡胶梁,2单位,黑色 41983672x3轮辐角块,3x120º,灰色 45025954x管子,2单位,灰色 45269854x齿轮,8齿,深灰色 45145594x齿轮,24齿,深灰色 45145584x齿轮,16齿,灰色 46405362x锥齿轮,12齿,米黄色 45654526x套管/轮轴延长器,2单位,红色 45131742x转台底,28齿规格,灰色46522352x蜗轮,灰色42115102x转台顶,28齿规格,黑色46522364x齿轮,4齿,黑色42482042x低轮胎,56x28 mm,黑色60353644x轮胎,30.4x4 mm,黑色60280411x钢球,金属银60239561x球座,深灰色46103804x轮毂,24x4 mm,深灰色458727554x轨道,5x1.5单位,黑色60146481x右弯面板,3x5单位,黑色45662491x左弯面板,3x5单位,黑色45662511x右弯面板,5x11单位,黑色45434901x左弯面板,5x11单位,黑色45413262x双锥齿轮,12齿,黑色41774312x双锥齿轮,20齿,黑色41774302x双锥齿轮,36齿,黑色42555631x陀螺仪传感器 60089161x超声波传感器 60089241x颜色传感器 60089192x触动传感器 60084721x中型电机 60085771x可充电电池 60128202x大型电机 60094301xEv3 控制器 60099961xUSB 电线 60369012x电线,35 cm/14 in. 60245831x电线,50 cm/20 in. 6024585。
综合实践研究性学习开展创新性活动品位创新的快乐《有趣的超声波传感器》市丰台区丰台第五小学郝劲峰Word资料一、指导思想与理论依据(一)指导思想综合实践的总目标是密切学生与生活的联系,推进学生对自然、社会和自我之在联系的整体认识与体验,发展学生的创新能力、实践能力以及良好的个性品质。
(二)理论依据1. 坚持学生的自主选择和主动参与,发展学生的创新精神和实践能力综合实践活动的实施要以学生的直接经验或体验为基础,将学生的需要、动机和兴趣置于核心地位,充分发挥学生的主动性和积极性,鼓励学生自主选择活动主题,积极开展活动,在活动中发展创新精神和实践能力。
2. 面向学生完整的生活领域,为学生提供开放的个性发展空间综合实践活动的实施是面向学生完整的生活领域,引领学生走向现实的社会生活,促进学生与生活的联系,为学生的个性发展提供开放的空间。
3. 注重学生的亲身体验和积极实践,促进学习方式的变革综合实践活动的实施强调学生乐于探究、勤于动手和勇于实践,注重学生在实践性学习活动过程中的体验和感受,要求学生超越单一的接受学习,亲身经历实践过程,体验实践活动,实现学习方式的变革。
二、教材分析1.教学容:《有趣的超声波传感器》是我校自主开发的机器人校本课程中的四年级部分。
本课共分为两课时,第一课时,学生学习认识超声波的概念,理解超声波传感器测距的原理,并能够使用超声波进行实际距离的测量。
本节课重点在与超声波在程序中的应用,通过超声波等待模块的使用来实现自动停车,机器人避障的效果,让学生感受程序与传感器共用所带来的神奇与乐趣。
2.知识背景:(1)声波:发声体产生的振动在空气或其他物质中的传播叫做声波。
根据震动频率及人耳朵能够听到的围分为次声波(震动频率20赫兹一下),声波(震动频率在20-20000赫兹之间),超声波(震动频率在20000赫兹以上)(2)超声波:声音的震动频率在20000赫兹以上,超出人耳朵能够听到的围的声波。
4x指针,3单位,白色 41739418x带轮轴的连接销,2单位,米黄色 46665796x连接销,3单位,米黄色 451455410x轮轴,2单位,红色 414286522x带轴套的连接销,3单位,红色 414080620x带摩擦/轮轴的连接销,2单位,蓝色 420648230x带摩擦的连接销,3单位,蓝色 45145534239601603182110x轴套,1单位,灰色 421162260x带摩擦的连接销,2单位,黑色 412171510x连接销,2单位,灰色 42118072x带末端的轮轴,4单位,深灰色 45601772x带末端的轮轴,8单位,深灰色 44998586x轮轴,5单位,灰色 42116395x轮轴,7单位,灰色 14x轮轴,3单位,灰色 42118152x轮轴,9单位,灰色 45357682x轮轴,8单位,黑色 370726单位,黑色 轮轴,12单位,黑色 3708264x轮轴,4单位,黑色 3705264x轮轴,6单位,黑色 3706264xT 形梁,3x3单位,黑色 4552347梁,3单位,黑色 41428224x角梁,4x6单位,黑色 41122824x角梁,3x5单位,白色45850404x双角梁,3x7单位,白色 44954124x梁,3单位,红色 41537186x角梁,2x4单位,红色 41412704x梁,3单位,蓝色 45093764x梁,3单位,黄色 41537076x梁,15单位,白色 45425784x梁,3单位,绿色 60079733x框架,5x7单位,灰色 45398801x框架,5x11单位,灰色 45407972x角梁,3x5单位,灰色 42117134x梁,5单位,灰色 42116514x角梁,3x7单位,灰色 42116244x梁,7单位,灰色 44959306x梁,9单位,灰色 42118664x梁,11单位,灰色 46117056x梁,13单位,灰色 4522934数字签名者:张波老师2x带手柄的连接销,3单位,黑色 45630442x交叉梁,2x1单位,红色 60085274x½ 三角梁,5x3单位,灰色 60090196x交叉块,3x2单位,灰色 45380076x双连接销,3x3单位,灰色 42250338x交叉块,2单位,灰色 42117754x带角连接销, 3x3单位,灰色 42960598x交叉块,3单位,深灰色 42108578x双交叉块,3单位,黑色 41216674x交叉块叉,2x2单位,黑色 41628572x½ 梁,4单位,黑色 41422364x角块 2,180º,黑色 41077832x角块,6(90º),黑色 41077674x带十字孔的橡胶梁,2单位,黑色 41983672x3轮辐角块,3x120º,灰色 45025954x管子,2单位,灰色 45269854x齿轮,8齿,深灰色 45145594x齿轮,24齿,深灰色 45145584x齿轮,16齿,灰色 46405362x锥齿轮,12齿,米黄色 45654526x套管/轮轴延长器,2单位,红色 45131742x转台底,28齿规格,灰色46522352x蜗轮,灰色42115102x转台顶,28齿规格,黑色46522364x齿轮,4齿,黑色42482042x低轮胎,56x28 mm,黑色60353644x轮胎,30.4x4 mm,黑色60280411x钢球,金属银60239561x球座,深灰色46103804x轮毂,24x4 mm,深灰色458727554x轨道,5x1.5单位,黑色60146481x右弯面板,3x5单位,黑色45662491x左弯面板,3x5单位,黑色45662511x右弯面板,5x11单位,黑色45434901x左弯面板,5x11单位,黑色45413262x双锥齿轮,12齿,黑色41774312x双锥齿轮,20齿,黑色41774302x双锥齿轮,36齿,黑色42555631x陀螺仪传感器 60089161x超声波传感器 60089241x颜色传感器 60089192x触动传感器 60084721x中型电机 60085771x可充电电池 60128202x大型电机 60094301xEv3 控制器 60099961xUSB 电线 60369012x电线,35 cm/14 in. 60245831x电线,50 cm/20 in. 6024585。