雷达技术雷达作用距离
- 格式:pdf
- 大小:1.94 MB
- 文档页数:70
摘要:文章简要介绍了雷达技术发展简史和雷达技术在现代国防中的地位和作用,简述了几种先进雷达的体制和技术的基本原理以及国外的先进雷达应用情况,提出了现代战争下雷达技术发展展望。
0 前言雷达(Radar)是英文“Radio Detection and Ranging”缩写的译音,意思是无线电检测和定位。
近年来更广义的Radar的定义为:利用电磁波对目标检测/定位/跟踪/成像/识别。
雷达是战争中关键的侦察系统之一,它提供的信息是决策的主要基础。
雷达可用于战区侦察,也可用于战场侦察。
装有雷达导引头的导弹、灵巧炸弹能精确地、有效地杀伤目标。
在反洲际弹道导弹系统,反战术弹道导弹系统中,雷达是主要的探测器。
雷达技术在导航、海洋、气象、环境、农业、森林、资源勘测、走私检查等方面都起到了重要作用。
下面简要叙述雷达技术发展简史。
雷达技术首先在美国应用成功。
美国在1922年利用连续波干涉雷达检测到木船,1933年6月利用连续波干涉雷达首次检测到飞机。
该种雷达不能测距。
1934年美国海军开始发展脉冲雷达。
英国于1935年开始研究脉冲雷达,1937年4月成功验证了CH(Chain Home)雷达站,1938年大量的CH雷达站投入运行。
英国于1939年发展飞机截击雷达。
1940年由英国设计的10cm波长的磁控管由美国生产。
磁控管的发展是实现微波雷达的最重要的贡献。
1940年11月,美国开发微波雷达,在二次世界大战末期生产出了10cm的SCR-584炮瞄雷达,使高射炮命中率提高了十倍。
二战中,俄、法、德、意、日等国都独立发展了雷达技术。
但除美国、英国外,雷达频率都不超过600MHz。
二战中,由于雷达的很大作用,产生了对雷达的电子对抗。
研制了大量的对雷达的电子侦察与干扰设备,并成立了反雷达特种部队。
二战后,特别是五、六十年代,由于航空航天技术的飞速发展,用雷达探测飞机、导弹、卫星、以及反洲际弹道导弹的需要,对雷达提出了远距离、高精度、高分辨率及多目标测量的要求,雷达进入蓬勃发展阶段,解决了一系列关键性问题:脉冲压缩技术、单脉冲雷达技术、微波高功率管、脉冲多卜勒雷达、微波接收机低噪声放大器(低噪声行波管、量子、参量、隧首二极管放大器等)、相控阵雷达。
雷达探测功能详解
雷达是一种广泛应用于军事、民用领域的电子装备,其主要功能是探测目标并获取目标的信息。
雷达探测功能的核心是探测目标的位置和速度,并通过信号处理和数据分析获取目标的更多信息。
雷达探测功能主要包括以下几个方面:
1. 距离探测:雷达通过发射脉冲信号并接收目标反射回来的信号来测量目标与雷达的距离。
这是雷达最基本的功能之一。
2. 方位探测:雷达通过测量目标反射信号到达雷达的方向来确定目标的方位。
方位探测可以使用机械扫描、电子扫描等不同的技术。
3. 高度探测:雷达可以通过测量目标反射信号的到达时间和相位变化来确定目标的高度,尤其对于航空目标的探测非常重要。
4. 速度探测:雷达可以通过测量目标反射信号的多普勒频移来确定目标的速度,这是雷达探测功能的另一个重要方面。
5. 周期探测:雷达可以通过周期性变化的信号探测目标的周期变化,如雷达在天气探测中可以探测到云层的运动周期。
6. 目标识别:雷达可以通过信号处理和数据分析来识别目标,如识别目标的大小、形状、材质等信息,从而实现目标的分类和识别。
总之,雷达探测功能是一项非常复杂和精密的技术,它不仅在军事领域发挥着重要作用,同时也被广泛应用于民用领域,如天气预报、航空导航、海洋探测等。
- 1 -。
雷达作用距离方程公式
雷达技术是一种广泛应用于现代军事、民用领域的无线电探测和测距技术。
而雷达作用距离方程公式是雷达技术中非常重要的一个数学公式,其作用是计算雷达探测目标距离的数学公式。
雷达作用距离方程公式可以用来计算雷达发射的电磁波向目标物体传播并返回的时间,以此推算出目标物体的距离。
根据雷达技术的原理,雷达发射器发射的电磁波信号会在空气中传播并遇到目标物体后反射回来,这个过程中电磁波信号会经历一段时间的传播和反射,最终返回雷达接收器。
雷达作用距离方程公式就是通过计算电磁波信号传播时间并乘以光速得出目标物体距离的数学公式。
具体来说,雷达作用距离方程公式可以表示为:
R = c × t / 2
其中,R表示目标距离,c表示光速,t表示电磁波从发射到反射返回所需的时间。
由于电磁波在空气中传播速度是光速的一半,因此公式中需要除以2才能得到目标距离。
需要注意的是,雷达作用距离方程公式只能计算出目标物体到雷达发
射器的距离,并不能确定目标物体的具体位置。
在实际应用中,常常需要根据多个雷达探测站的数据进行三角定位来确定目标物体的精确位置。
总之,雷达作用距离方程公式是雷达技术中非常重要的一个数学公式,可以用来计算雷达探测目标距离。
对于雷达技术的了解和应用,掌握这个数学公式非常有帮助。
雷达的功能雷达(Radar)是一种通过发射电磁波并接收其反射信号来探测与跟踪物体的设备。
雷达具有多种功能,包括测量距离、检测速度、确定位置和跟踪目标等。
首先,雷达可以测量目标的距离。
雷达通过发射电磁波并计算从发射到接收的时间来确定目标与雷达之间的距离。
这种距离测量功能广泛应用于军事、航空、航海、交通等领域。
例如,军事上的雷达可以测量敌军舰船或飞机与自己的距离,以便评估敌军的威胁性和采取相应的行动。
其次,雷达可以检测目标的速度。
当电磁波与目标发生接触时,部分波将被目标反射回来,这些反射波的频率会发生改变,称为多普勒频移。
通过测量多普勒频移,雷达可以确定目标的速度。
在交通监控系统中,雷达可以用于检测车辆的速度,帮助交警监测超速行为并采取相应的处罚措施。
雷达还可以确定目标的位置。
当雷达发射电磁波并接收到目标的反射信号后,它可以通过计算反射信号的方向和强度来确定目标的位置。
在航空领域,雷达可以用于航空管制系统,实时监测飞机的位置并确保飞机之间的安全间距。
此外,雷达还有跟踪目标的功能。
当目标进入雷达的监测范围时,雷达可以持续追踪目标的位置和运动。
跟踪功能被广泛应用于军事领域,例如导弹防御系统可以通过雷达追踪来袭的导弹,并计算出合适的反击策略。
雷达还具有识别目标的能力。
通过分析反射信号的特征,雷达可以区分不同类型的目标。
例如,民航雷达可以将飞机与其他杂波进行区分,使其能够识别并关注真正的飞机目标。
综上所述,雷达具有测量距离、检测速度、确定位置、跟踪目标和识别目标等多种功能。
这些功能使得雷达在军事、航空、航海、交通等领域发挥了重要的作用,提高了工作效率和安全性。
随着技术的发展,雷达的功能也在不断拓展,未来雷达将有更多应用的可能性。
雷达最大作用距离公式
雷达最大作用距离公式是指根据雷达的天线高度和雷达功率等
参数,计算出雷达能够探测到的最大距离的公式。
该公式可以用于雷达设计和性能评估等方面。
一般来说,雷达最大作用距离公式可以表示为:
Rmax = sqrt((Pt * Gt * Gr * λ^2) / (4π * σ * L)) 其中,Rmax表示雷达最大作用距离,Pt表示雷达发射功率,Gt 和Gr分别表示雷达天线的发射和接收增益,λ表示雷达运行的波长,σ表示目标雷达截面积,L表示雷达接收机的噪声功率。
该公式的主要参数是雷达发射功率、天线增益和目标雷达截面积等,这些参数直接影响雷达的探测距离和灵敏度。
在雷达设计和优化中,需要根据实际情况进行参数的调整和优化,从而提高雷达的性能和探测距离。
- 1 -。
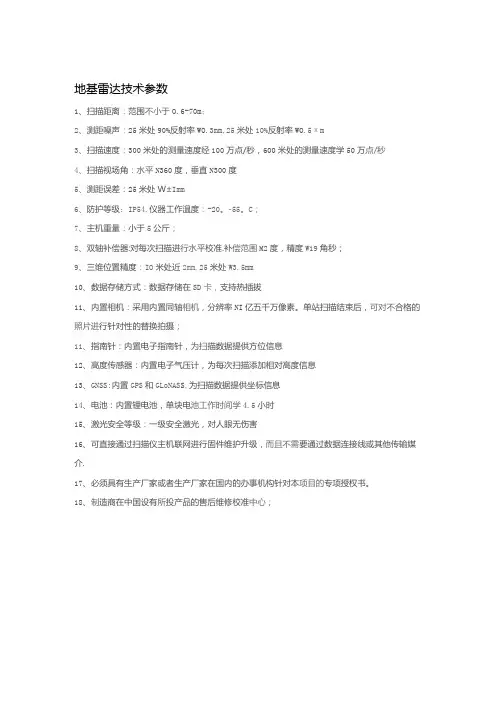
地基雷达技术参数
1、扫描距离:范围不小于O.6-70m;
2、测距噪声:25米处90%反射率WO.3mm,25米处10%反射率WO.5πm
3、扫描速度:300米处的测量速度经100万点/秒,600米处的测量速度学50万点/秒
4、扫描视场角:水平N360度,垂直N300度
5、测距误差:25米处W±Imm
6、防护等级:IP54,仪器工作温度:-20。
-55。
C;
7、主机重量:小于5公斤;
8、双轴补偿器:对每次扫描进行水平校准.补偿范围M2度,精度W19角秒;
9、三维位置精度:IO米处近2mm,25米处W3.5mm
10、数据存储方式:数据存储在SD卡,支持热插拔
11、内置相机:采用内置同轴相机,分辨率NI亿五千万像素。
单站扫描结束后,可对不合格的照片进行针对性的替换拍摄;
11、指南针:内置电子指南针,为扫描数据提供方位信息
12、高度传感器:内置电子气压计,为每次扫描添加相对高度信息
13、GNSS:内置GPS和GLoNAS S,为扫描数据提供坐标信息
14、电池:内置锂电池,单块电池工作时间学4.5小时
15、激光安全等级:一级安全激光,对人眼无伤害
16、可直接通过扫描仪主机联网进行固件维护升级,而且不需要通过数据连接线或其他传输媒介.
17、必须具有生产厂家或者生产厂家在国内的办事机构针对本项目的专项授权书。
18、制造商在中国设有所投产品的售后维修校准中心;。
雷达--------探测距离、分辨⼒、距离精度、⽅位精度、抗⼲扰⼒雷达的技术指标⼤致包括其探测距离、分辨⼒、距离精度、⽅位精度、抗⼲扰⼒等。
下⾯就详细介绍⼀下各项技术指标。
1、探测距离关于探测距离⾸先先从来了解⼀下雷达⽅程的简单⾏式。
(1)上式中右侧第⼀项表⽰的是增益为Gt的天线辐射功率为Pt在离雷达距离R处的功率密度。
右侧第⼆项的分⼦σ是⽬标截⾯积(平⽅⽶),是⽬标返回雷达⽅向的能量的度量;分母表⽰回波信号能量在返回向雷达的途径上随距离的发散程度(为⽬标截⾯积)。
这两项相乘得到的是每平⽅⽶上返回雷达的功率。
Ae称为有效孔径⾯积。
Pr为接收功率。
所以求得的雷达的最⼤作⽤距离应为接收功率Pr等于雷达最⼩可检测信号Smin时雷达的探测距离。
所以:(2)其中与发射增益Gt⼀样还有接收天线增益Gr。
⽽接收天线增益Gr与有效孔径⾯积Ae的关系为:(3)将3式代⼊2式中可得:(4)其中λ为雷达的信号波长。
上式中的Smin受噪声以及系统的限制。
可表⽰为:(5)其中k为玻尔兹曼常数,T0为噪声温度。
B为接收系统等效带宽。
Mn为识别系数。
Ls是系统损耗。
Nf为噪声系数。
2、分辨⼒包括距离分辨⼒和⽅位分辨⼒:距离分辨⼒:主要取决于码元宽度、码元宽度⼜取决于编码调制速率。
⽅位分辨⼒:与天线的⽅位波束宽度有关。
(对于⾮合成孔径雷达,⽅位分辨⼒仅取决于天线波束宽度。
当两个⽬标同时在波束内⽽且距离相等,雷达并不能判定⽬标数量,于是只能认为探测到⼀个⽬标。
天线孔径越⼤,这个指标越⾼,天线尺⼨越⼤)。
3、距离精度引起距离误差的误差源有热噪声、⽬标闪烁误差、码元前后沿抖动、距离标定误差、接收通道延迟变化、零点漂移等,其中主要是热噪声误差。
a)数据量化误差,由量化引起的误差为:R M--------最⼤探测距离,Q--------计算机字长。
b)脉冲抖动由信号发⽣器输出的定时同步脉冲抖动引起的测距误差c为光速,最⼤脉冲抖动量。
c)距离时钟量化fc为距离时钟频率。
船⽤雷达技术要求和使⽤要求1. 主题内容和适⽤范围本标准适⽤于船⽤导航雷达。
1.1 ⽆线电频率雷达设备⼯作的⽆线电频率在任何时刻均应在国际电信联盟颁发的“⽆线电规则”所规定的范围内。
2. ⽬的雷达设备应能相对于本船的其他⽔⾯船舶和障碍物、浮标、海岸线以及导航标志的位置,这将有助于导航和避碰。
设备的安装应满⾜该设备所规定的性能标准。
3. 性能要求所有雷达设备均应满⾜下述最低要求。
3.1 作⽤距离在正常传播条件下,当雷达天线架设在海⾯以上15⽶⾼度时,在⽆杂波的情况下,设备应清楚地显⽰出:3.1.1 海岸线⾼度为60⽶的陆地,距离为20海⾥。
⾼度为6⽶的陆地,距离为7海⾥。
3.1.2 ⽔⾯⽬标对5000吨(总吨,下同)的船舶,不管其⾸向如何,距离为7海⾥。
对10⽶长的⼩船,距离为3海⾥。
对有效反射⾯积约10平⽅⽶的导航浮标之类的⽬标,距离为2海⾥。
3.2 显⽰3.2.1 雷达设备应提供⾸向向上⾮稳定相对平⾯位置显⽰,在没有外部放⼤装置的情况下,其有效显⽰直径不⼩于下列规定:3.2.1.1 500 吨到1600 吨以下的船舶为180毫⽶;3.2.1.2 1600 吨到10000 吨以下的船舶为250毫⽶;3.2.1.3 10000 吨和10000 吨以上的船舶,⼀台雷达的显⽰器为340毫⽶,另⼀台雷达的显⽰器为250毫⽶。
3.2.1.4 若放⼤后的显⽰精度在本标准的精度范围内,也可以使⽤光学放⼤装置。
3.2.1.5 与雷达导航或避碰⽆关的任何信息只允许显⽰在屏幕有效直径的外⾯。
3.2.2 设备应供应下列两组显⽰量程中的任⼀组:3.2.2.1 1.5、3、6、12、24海⾥以及⼀档不⼩于0.5海⾥且不⼤于0.8海⾥的量程组;3.2.2.2 1、2、4、8、16、32海⾥的量程组。
3.2.3 设备还可以提供其他量程。
3.2.3.1 所提供的其他量程应⽐第3.3.2条所要求的最⼩量程更⼩,或者⽐第3.3.2条所要求的最⼤量程更⼤。