毕业设计--结晶器液压振动系统设计
- 格式:pdf
- 大小:4.59 MB
- 文档页数:28

《双液压缸驱动的连铸结晶器振动系统同步控制研究》篇一一、引言在连铸生产过程中,结晶器振动系统起着至关重要的作用。
其性能的优劣直接影响到铸坯的质量和生产的效率。
为了满足现代连铸工艺的高要求,双液压缸驱动的连铸结晶器振动系统因其高精度、高稳定性的特点被广泛应用。
然而,双液压缸的同步控制问题一直是该系统的研究重点和难点。
本文旨在研究双液压缸驱动的连铸结晶器振动系统的同步控制,以提高系统的性能和稳定性。
二、双液压缸驱动的连铸结晶器振动系统概述双液压缸驱动的连铸结晶器振动系统主要由两个液压缸、液压泵、阀组、传感器以及结晶器等部分组成。
其中,两个液压缸分别连接在结晶器的两侧,通过液压泵提供动力,阀组控制液压缸的运动,传感器则负责监测系统的运行状态。
该系统的运行原理是通过控制两个液压缸的同步运动,实现结晶器的振动。
三、同步控制问题及研究现状尽管双液压缸驱动的连铸结晶器振动系统具有许多优点,但同步控制问题一直是制约其性能的关键因素。
当两个液压缸的运动不同步时,会导致结晶器振动不稳定,进而影响铸坯的质量和生产的效率。
目前,国内外学者针对该问题进行了大量研究,包括控制策略的优化、传感器技术的改进等方面。
然而,由于连铸工艺的复杂性和多变性,现有的同步控制方法仍存在一定局限性。
四、同步控制方法及策略针对双液压缸驱动的连铸结晶器振动系统的同步控制问题,本文提出了一种基于模糊控制的同步控制策略。
该方法通过引入模糊控制算法,实现对两个液压缸运动的精确控制。
具体而言,该方法首先通过传感器实时监测两个液压缸的运动状态,然后根据模糊控制算法计算出合适的控制量,通过阀组对液压缸的运动进行精确控制,从而实现两个液压缸的同步运动。
五、实验与结果分析为了验证本文提出的同步控制策略的有效性,我们进行了大量的实验。
实验结果表明,采用该策略后,双液压缸驱动的连铸结晶器振动系统的同步性能得到了显著提高。
与传统的同步控制方法相比,该方法在各种工况下都能实现两个液压缸的精确同步,且具有较好的鲁棒性。

《双液压缸驱动的连铸结晶器振动系统同步控制研究》篇一一、引言在连续铸造工艺中,结晶器振动系统作为关键的辅助设备,对于钢水的均匀凝固和坯壳的顺利形成起着至关重要的作用。
为了提高连铸过程的生产效率和产品质量,本论文对双液压缸驱动的连铸结晶器振动系统同步控制进行了深入研究。
本文首先介绍了研究背景和意义,然后概述了国内外相关领域的研究现状,最后阐述了本文的主要研究内容和结构安排。
二、双液压缸驱动的连铸结晶器振动系统概述双液压缸驱动的连铸结晶器振动系统主要由液压缸、振动装置、控制系统等部分组成。
其中,液压缸作为系统的动力源,为振动装置提供稳定的驱动力;振动装置则负责将驱动力转化为结晶器的振动,以实现钢水的均匀凝固;控制系统则负责控制液压缸的驱动和振动装置的振动,保证系统的同步性和稳定性。
三、同步控制策略研究针对双液压缸驱动的连铸结晶器振动系统的同步控制问题,本文提出了以下策略:1. 硬件同步控制策略:通过优化液压缸和振动装置的硬件设计,提高系统的同步性能。
例如,采用高精度的传感器和执行器,实时监测和调整液压缸的工作状态,确保两个液压缸的输出力一致。
2. 软件同步控制策略:通过优化控制系统软件,实现双液压缸的协同控制。
本文采用了模糊控制算法和PID控制算法相结合的方法,根据系统的实时状态调整控制参数,实现系统的快速响应和稳定控制。
3. 反馈校正策略:为了进一步提高系统的同步性能,本文引入了反馈校正策略。
通过实时获取系统的振动数据,与设定值进行比较,计算误差并进行校正,从而保证系统的同步性和稳定性。
四、实验研究为了验证本文提出的同步控制策略的有效性,我们进行了实验研究。
实验结果表明,采用硬件同步控制策略和软件同步控制策略后,双液压缸的输出力一致性和振动系统的同步性能得到了显著提高。
同时,引入反馈校正策略后,系统的稳定性得到了进一步提高。
在实际应用中,本文提出的同步控制策略可以有效提高连铸过程的生产效率和产品质量。

板坯连铸机结晶器振动液压装置的设计及计算文章介绍了某型不锈钢板坯连铸机组结晶器振动液压装置的设计计算过程。
计算系统所需流量,配置核心液压元件型号规格,对循环冷却系统进行了精确计算。
标签:连铸结晶器;振动;液压引言结晶器是板坯连铸机组的核心设备,而结晶器振动装置又是结晶器设备重要装置之一。
当结晶器上下振动时,钢水液面与结晶器壁面相对位置也随之改变。
其目的在于防止坯材在凝固过程中与结晶器铜壁发生粘连而出现拉漏、拉裂事故,同时有利于脱坯,改善坯壳与结晶器壁的润滑性等[1]。
结晶器液压振动因其能在线调整振动参数,近期有广泛的发展和推广。
文章即围绕国内某型板坯连铸机组的结晶器液压振动装置,对其进行分析计算和设计。
1 系统原理连铸机的结晶器液壓振动装置由两个液压缸推动整个机架做垂直方向上的非正弦曲线。
非正弦曲线运动的周期、振幅与正弦曲线其实是一致的,只是在半周期内由两条周期不同的正弦曲线(全周期为T,上升段周期为T+,下降为T-)拼接而成。
定义非对称系数C=T+/T,当C=0.5,曲线即为对称的正弦曲线;当0.5≤C≤1,比如C=0.6,则T+=0.6T,T-=0.4T,使得结晶器上振时间长,而下振时间短。
实际生产中C值大于0.5,一般在0.5~0.6。
振动装置由两部分组成:液压站和振动执行器。
液压站向振动执行器提供油。
振动执行器包括缸旁伺服阀和振动液压缸。
2 工作泵流量计算及选择工作泵的选择取决于液压缸运动所需的流量,因此先计算各个工况下所需流量。
(1)对称正弦运动(C=0.5)时,振动所需的平均供油流量振动液压缸参数为Φ125/Φ90。
单个液压缸的最大振幅Am为6.5mm,最大频率160次/min,在1/4个周期内,其平均速度Vp=Am/(T/4)=69(mm/s)。
此速度下单缸塞腔供油平均流量为51L/min。
两个液压缸同时工作则需要102L/min,取效率系数0.8,得127 L/min。
(2)对称正弦运动(C=0.5)时,振动所需的最大供油流量正弦振动的速度为最大速度Vmax为Am 2πf,此速度下单缸最大供油流量80.19L/min,两个液压缸同时工作则需要160.3 L/min。

《伺服电机驱动的连铸结晶器振动台系统建模及实验研究》篇一一、引言随着现代工业的快速发展,连铸技术作为钢铁生产过程中的关键环节,其设备性能的优化与升级显得尤为重要。
其中,伺服电机驱动的连铸结晶器振动台系统是影响连铸过程质量与效率的关键因素之一。
本文旨在通过建模及实验研究,深入探讨伺服电机驱动的连铸结晶器振动台系统的性能特点及优化策略。
二、系统建模1. 模型构建伺服电机驱动的连铸结晶器振动台系统主要由伺服电机、减速器、振动台等部分组成。
在建模过程中,需考虑系统的动力传递、振动特性以及外界干扰等因素。
通过分析各部分的工作原理及相互关系,建立系统的数学模型。
2. 参数设定在建模过程中,需设定合理的参数,如伺服电机的转速、转矩、加速度等,以及振动台的振动频率、振幅等。
这些参数将直接影响系统的性能及连铸过程的质量与效率。
3. 模型验证为确保模型的准确性,需通过实验对模型进行验证。
通过对比实验数据与模型预测数据,分析模型的误差及影响因素,进一步优化模型。
三、实验研究1. 实验设备与材料实验所需设备包括伺服电机、减速器、振动台、数据采集器等。
材料主要为连铸过程中的铸坯。
2. 实验方法与步骤(1)设定伺服电机的转速、转矩、加速度等参数,以及振动台的振动频率、振幅等参数;(2)启动系统,进行连铸过程;(3)通过数据采集器采集系统的运行数据,如电机的电流、电压、振动台的振动数据等;(4)分析实验数据,评估系统的性能及连铸过程的质量与效率;(5)根据实验结果,对模型进行验证与优化。
3. 实验结果及分析通过实验数据的分析,可以得到以下结论:(1)伺服电机驱动的连铸结晶器振动台系统具有较高的控制精度和稳定性,能够满足连铸过程的要求;(2)系统的性能受伺服电机参数及振动台参数的影响较大,需进行合理的设定与优化;(3)通过优化系统的参数,可以提高连铸过程的质量与效率,降低生产成本。
四、结论与展望本文通过对伺服电机驱动的连铸结晶器振动台系统进行建模及实验研究,深入探讨了系统的性能特点及优化策略。
摘要液压系统在压路机设计当中应用越来越广泛,本次设计的小型振动式压路机采用全液压传动,对液压系统做了基本的设计,液压系统各元件的选型,整车液压系统的装配设计。
全液压小型振动压路机传动系统动力元件是柴油发动机,发动机传输的动力主要传递给三个驱动系统,即液压行走系统,液压振动系统和液压转向系统,由这三个子系统完成整机主传动系统的行驶、振动和转向功能。
液压振动回路是振动压路机液压系统中的一个重要组成部分,其性能决定了振动压路机的使用范围和压实效果。
液压振动回路中的执行机构为振动液压马达,直接驱动振动轴(也是振动轮的中心轴)。
压路机作业时,振动轴带动其上的偏心块高速旋转产生离心力,强迫振动对地面产生很大的激振冲击力,形成冲击压力波,向地表内层传播,引起被压层颗粒振动或产生共振,达到预期的压实目的。
振动压路机的转向系统多采用铰接式转向,并由液压缸改变相邻车架间的相对夹角,而使振动压路机可以以不同的转弯半径转向。
液压行驶系统采用闭式回路,采用闭式系统专用的变量泵,可以改变转动方向和排量,以次来控制驱动轮的前进、后退,以及行驶速度。
关键词:振动压路机、液压行驶系统、液压液压振动系统、液压转向系统。
AbstractThe hydraulic system is more and more widely applied in the design of road roller system. In this design,the application of the full hydraulic system in the engineering machine is attempted. Vibration road roller is analyzed and designed comprehensively.Hydraulic components is selected.The whole hydraulic system assembly of the road roller and the vibration device assembly is designed.The engine unit adopts diesel engine .The driving force of the engine is passed to three separate system,that is, hydraulic walking system ,hydraulic vibration system and hydraulic steering system.The three subsystems complete the roller's driving,vibration and and steering functions.The hydraulic vibration circuit is an important part of the main system.Its performance determines the use scope and compaction effect of vibratory roller .The executive body of this hydraulic circuit is hydraulic motor.directly driving vibration shaft (also the center shaft the vibration wheel).When the roller is operated,the vibration shaft drive the eccentric block on it to revolve at a high speed.Forced vibration cause great impact,then form pressure wave which is transmitted to the inner layer to the surface and excite the particle in this layer to vibrate.By vibration or resonan the desired compaction purposes.is achieved.Vibratory roller steering system usually use articulated steering.The relative angle between adjacent frames is changed by the hydraulic cylinder so that vibratory rollers can turn in different turning radius. The hydraulic walking system adopt variable displacement axial piston pump of swashplate designed for hydraulic closed circuit.The rotation direction and displacement of the pump can be changed so as to control the driving wheel moving forward and backward, and its moving speed.Key words:Vibration road roller; Hydraulic vibration system; Hydraulic walking system; Hydraulic steering system.目录1 概述 (1)1.1 选题目的与意义 (1)1.2 设计题目及参数要求 (1)1.3 液压系统配置 (1)2 压路机工作参数的确定 (3)2.1 主机结构方案拟定 (3)2.2 基本参数确定计算 (3)2.2.1 工作重量m (3)2.2.2 前后轮分配重 (3)2.2.3 重心位置的确定 (3)2.2.4 压轮直径 (4)2.2.5 压轮宽度 (4)2.2.6 前后轮静线载荷 (4)2.3 行走速度 (4)3 初选发动机 (6)3.1 发动机基本形式的确定 (6)3.2 初估发动机功率 (6)3.3 初选发动机型号 (7)4 液压行驶系统设计 (8)4.1 液压行走驶系统方案拟定 (8)4.2 行驶系统的功率计算 (8)4.3 液压泵和液压马达的确定 (9)4.3.1 液压泵功率的计算 (9)4.3.2 液压泵和液压马达的选择 (10)4.3.3 验算泵和马达的储备系数 (10)4.4 主要液压元件的选择 (11)4.4.1 主回路两个安全阀的选择 (11)4.4.2 补油泵的选择 (11)4.4.3 补油回路单向阀的选择 (12)4.4.4 液动换向阀的选择 (12)3.4.5 手动换向阀的选择 (12)3.4.6 过滤器的选择 (12)5 液压振动系统设计 (13)5.1 液压振动系统方案拟定 (13)5.2 系统功率的计算 (13)5.3 液压泵的计算 (14)5.4 液压马达的计算 (15)5.5 验算 (15)5.6 阀的选择 (16)5.6.1 主回路安全阀 (16)5.6.2 电磁换向阀的选择 (16)5.7 吸油口过滤器的选择 (16)6 液压转向系统设计 (17)6.1 系统方案拟定 (17)6.2 铰接式压路机原地转向阻力矩 (17)6.3 液压缸参数的确定 (18)6.4 转向液压泵参数的确定 (18)6.5 全液压转向器的选择 (19)6.6 转向功率计算 (19)6.7 其他液压元件的选择 (21)6.7.1 溢流阀的选择 (21)6.7.2 吸油口过滤器的选择 (21)7 发动机型号的确定 (22)7.1 系统实际所需功率 (22)7.2 发动机冷却方式的选择 (22)8 主要金属管的选择 (23)8.1 液压行驶系统钢管的选择 (23)8.1.1 主回路管道的确定 (23)8.1.2 补油回路管道的确定 (24)8.2 液压振动系统钢管的选择 (25)8.3 液压转向系统钢管的选择 (25)9 主要软管的选择 (27)9.1 液压行驶系统软管选择 (27)9.2 液压振动系统软管选择 (27)9.3 液压转向系统软管选择 (27)10 油箱的设计 (29)10.1 油箱容量的确定 (29)10.2 油箱尺寸的确定 (29)10.3 油箱的散热验算 (29)10.3.1 系统发热量计算 (29)10.3.2 液压系统的散热功率计算 (30)10.4 油箱附件的选择与结构设计 (31)10.5 油液的选择 (32)11 阀块的设计 (33)结束语 (35)参考文献 (36)致谢 (37)1 概述1.1 选题目的与意义小型振动式压路机是一种用于路面养护和小型路面工程施工的压实机械。
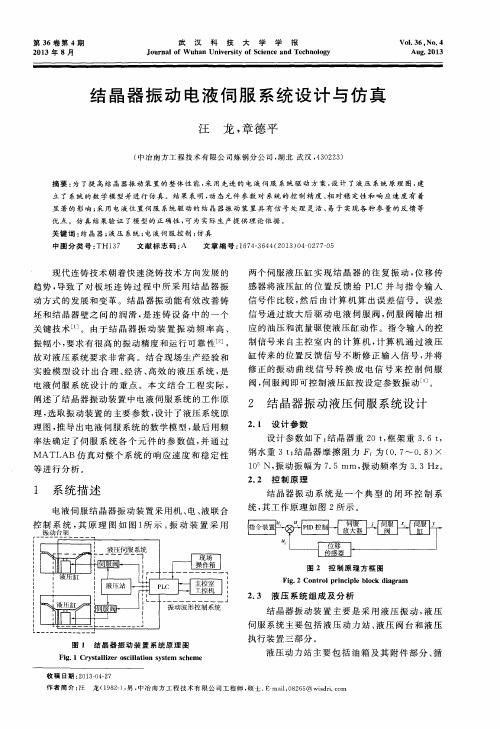
摘要在现代钢铁企业中,结晶器是连铸工艺的关键设备,为保证连铸生产的顺利进行,需要通过一个振动装置使结晶器按一定的规律振动。
目前国外已广泛采用了先进的液压式振动,而国内对此研究甚少。
结晶器液压振动系统,可以很方便地产生各种振动规律,实时显示并根据拉坯速度修改振动参数。
连铸机结晶器振动波形发生器从总体上分为两个部分:上位机部分和下位机部分,本设计为上位机部分。
利用微软公司开发的Visual Basic软件,设计了结晶器液压振动波形监控界面。
将下位机产生的波形信号通过串行通信方式传送给上位机,可以通过该监控界面显示,将波形数据直观地展现出来。
同时,可通过键盘远程修改上位机显示的波形参数。
关键词:结晶器;波形发生器;串口通信;Visual BasicThe design of mould hydraulic vibration waveformgenerator based on SCM-upper PC partAbstractIn the modern iron and steel enterprises , continuous casting is the key equipment of steel-making process. And in order to ensure the smooth progress of continuous casting production , it is essential to install a vibration device ,thus continuous casting can vibrate according to a certain law. Currently abroad has widely used advanced hydraulic vibration ,but little studied on it in the domestic .In light of this situation ,the hydraulic vibration waveform generators of continuous casting were studied in this thesis.The mould hydraulic vibration system can conveniently generate kinds of vibration laws and real-timely show and modify the vibration parameter according to the speed of the casting. The hydraulic vibration waveform generator of continuous casting mould is divided into two parts ;the upper part and the lower part of generator .The paper takes the upper part of generate for study object .Using the Visual Basic software that developed by Microsoft ,I designed a interface of waveform detect .Then send the waveform signal generated by the lower part to the upper part through series communications scheme .And then these signals will analysis and mould every parameters such as amplitude and frequency through the waveform detect interface.Thus, waveform data can be directly to present. At the same time,it can modify the waveform parameter of the upper part showed and control the vibrate form of the mould remotely.Key words:Mould ; waveform Generator ; Serial communication ; Visual Basic目录摘要 (I)Abstract (II)第一章引言 (1)1.1结晶器振动技术概述 (1)1.1.1结晶器振动形式 (2)1.1.2结晶器振动技术的发展及现状 (4)1.2本课题的研究意义及内容 (6)1.2.1本课题的研究意义 (6)1.2.2本课题的研究内容 (7)第二章结晶器液压振动控制系统设计方案 (8)2.1 结晶器液压振动控制系统 (8)2.2 液压振动波形发生器 (9)2.2.1 系统介绍 (9)2.2.2 系统结构 (9)第三章 VB及其可视化编程技术 (11)3.1 计算机程序设计语言简介 (11)3.1.1 程序设计语言的发展 (11)3.1.2 程序设计语言的发展趋势 (12)3.1.3 计算机程序设计方法的发展概况 (13)3.2 编程软件介绍及选择 (14)3.3 Visual Basic的特点 (14)第四章基于Visual Basic的串口通信技术 (17)4.1 上、下位机通信方式选择 (17)4.2 串行口通信概述 (17)4.2.1 串行口通信 (17)4.2.2 串口接口标准 (18)4.2.3 MAX232芯片介绍 (19)4.3 VB串口通信 (21)4.3.1 串行通信的基本原理 (21)4.3.2 串口通信程序设计 (21)4.4 MSComm控件 (22)第五章基于VB的波形发生器监控界面的设计 (24)5.1 显示面板设计 (24)5.1.1 内部控件简介 (24)5.1.2 程序代码的作用 (26)5.1.3 系统界面设计 (26)5.2 功能与实现 (30)5.2.1 正弦曲线的绘制 (30)5.2.2 非正弦曲线的绘制 (31)第六章总结 (34)参考文献 (35)附录 (36)致谢 (44)第一章引言1.1结晶器振动技术概述连铸和通常的钢锭浇铸相比,具有增加金属收得率,节约能源,提高铸坯质量,便于实现机械化、自动化等优点。
《伺服电机驱动的连铸结晶器振动台系统建模及实验研究》篇一一、引言随着工业自动化技术的不断发展,伺服电机驱动技术已经在连铸结晶器振动台系统中得到了广泛应用。
为了提高生产效率和产品质量,对伺服电机驱动的连铸结晶器振动台系统进行建模及实验研究显得尤为重要。
本文旨在通过系统建模和实验研究,深入探讨伺服电机驱动的连铸结晶器振动台系统的性能特点及优化方法。
二、系统建模1. 模型构建连铸结晶器振动台系统是一个复杂的机电液一体化系统,包括伺服电机、减速器、振动台、传感器等部分。
为了更好地研究系统的性能,我们采用数学建模的方法,将系统简化为一个可描述的模型。
首先,我们根据系统的物理特性和运动规律,建立了系统的动力学方程。
考虑到伺服电机的力矩输出、减速器的传动比、振动台的惯性负载等因素,我们采用了多刚体动力学模型,将系统划分为若干个刚体,并建立了刚体之间的力和力矩关系。
其次,我们利用现代控制理论,将系统模型转化为一个可控制的数学模型。
通过引入控制器,我们可以根据实际需求对系统进行精确控制。
2. 模型验证为了验证模型的准确性,我们进行了仿真实验和实际实验。
仿真实验通过MATLAB等仿真软件进行,通过输入不同的控制信号,观察系统的响应情况。
实际实验则在实际的连铸结晶器振动台系统上进行,通过采集系统的实际数据,与模型预测结果进行对比。
通过对比分析,我们发现模型的预测结果与实际数据基本一致,证明了模型的准确性。
这也为我们后续的优化研究提供了可靠的依据。
三、实验研究1. 实验设计为了深入研究伺服电机驱动的连铸结晶器振动台系统的性能特点及优化方法,我们设计了一系列实验。
实验主要包括以下几个方面:(1)不同控制策略下的系统性能比较;(2)系统参数对系统性能的影响;(3)系统故障诊断及处理方法的研究。
2. 实验结果及分析(1)不同控制策略下的系统性能比较:我们采用了PID控制、模糊控制、神经网络控制等多种控制策略,通过实验发现,神经网络控制策略在连铸结晶器振动台系统中具有较好的控制效果和鲁棒性。
摘要四偏心板坯连铸机快台在连续铸钢中有及其重要的作用。
其振动装置用来支撑结晶器,使结晶器上下往复运动,从而使脱模更容易。
本设计主要是针对结晶器振动台振动系统的总体设计,其中包括:总体传动方案的设计以及正弦式振动方式的选择;偏心轴材料的选择,结构设计以及轴上零件的布置和装配方案,偏心轴受力分析和校核;偏心轴上零件,如轴承和键的选用及其校核。
另外,还包括振动系统其它重要零件如销轴及板弹簧的设计等。
如何对偏心轴上偏心距的设计是每个设计者应该考虑的问题。
其中要考虑到不同偏心距对振幅的影响以及振动台是否能实现预定的轨迹。
振动方式为正弦振动,可以通过调整振源机构的振幅来调整结晶器的振幅,在设计偏心轴时,要设计不同振幅所需要的不同偏心距。
振动系统是长期使用的,由于所受的是动载荷,容易受到磨损,会减少其使用寿命。
故在设计的时候,要考虑其使用年限,尤其是转动的部件,如轴承,偏心轴。
关键词:结晶器;振动装置;偏心轴;四偏心轮振动机构;板弹簧AbstractFour quick sets eccentric slab caster acts a very important role in continuous casting. The vibration device is used to support crystallizer,crystallizer is reciprocated up and down,then it makes stripping easier.The paper mainly aims at the general design of crystallizer vibration table vibration system,including design of general transmission program and selection of the sinusoid vibration mode;selection of eccentric shaft material,the structure design,arrangement and assembly project of elements on shafts,the force analysis and checking of eccentric shafts;selection and checking of elements on eccentric shafts,such as the bearing and key.Moreover,design of other important elements of vibration system is included,such as the pin and plate spring and so on.Every designer should consider how to design the eccentric distance of the eccentric shaft,taking into account the impact of different eccentric distance on amplitude and whether vibration table achieves a prescribed track.The vibration mode is the sinusoidal vibration,amplitude of crystallizer is adjusted by rectifying the amplitude of vibration source mechanism.Designing eccentric shafts,the eccentric distance that different vibration amplitude needs is designed.The vibration system is used for long time.Because it bears the dynamic load,it is easy to abrade,and its service life is reduced.So the service life is considered in the design,especially the rotating components such as bearing and eccentric shaft.Key Words: Crystallizer;Vibration device;Eccentric shaft;Four eccentric wheel vibration mechanism;Plate spring目录1绪论 (1)1.1 课题的研究意义和目的 (1)1.1.1 课题的研究意义 (1)1.1.2课题的目的 (1)1.2国内外概况 (2)1.2.1 结晶器振动概述 (2)1.2.2振动的结晶器使连续铸钢实现工业化 (3)1.2.3结晶器振动规律的发展 (3)1.2.4 结晶器振动装置的发展 (4)1.2.5 结晶器非正弦振动的分类 (5)1.3设计内容 (5)1.4主要技术参数 (5)1.5本章小结 (6)2结晶器振动台振动系统方案设计 (7)2.1结晶器振动的目的 (8)2.2振动方式类型及其选择 (8)2.3偏心轮机构实现的正弦振动 (9)2.4偏心轮机构的结构方案 (11)2.4.1 外侧机构参数确定方法 (11)2.4.2 内侧机构参数确定方法 (13)2.5传动部分初选电机 (16)2.6本章小结 (16)3振动台偏心轴的设计 (17)3.1轴的类型选择 (17)3.2轴的材料 (17)3.3轴的结构设计 (17)3.4轴上零件的布置和装配方案 (18)3.5初算轴的直径 (18)3.6决定各轴段直径和长度 (19)3.7轴上力分析及校核 (19)3.8本章小结 (25)4偏心轴上零件设计计算 (26)4.1 联轴器的选择 (26)4.2 轴承的选择及寿命校核 (26)4.2.1 轴承1的选择及其校核 (27)4.2.2 轴承2的选择及其校核 (28)4.3 键的选用及校核 (30)4.4 本章小结 (30)5偏心轴上零件设计计算 (31)5.1 支架处销轴的设计及其校核 (31)5.2 销轴外的缓冲器设计及其校核 (32)5.3 板弹簧的设计及其校核 (33)5.4 本章小结 (36)6 结论与展望 (37)6.1 结论 (37)6.2 展望 (37)参考文献 (38)致谢 .................................................... 错误!未定义书签。
《连铸结晶器非正弦振动装置的设计及研究》篇一一、引言随着现代工业的快速发展,连铸技术作为金属冶铸领域的重要工艺,其设备性能的优化与改进显得尤为重要。
其中,连铸结晶器振动装置作为连铸过程中的关键设备,其振动特性的优化对于提高铸坯质量、减少缺陷具有重要意义。
传统的正弦振动方式在特定情况下已无法满足高质量铸坯的生产需求,因此,本文提出了一种连铸结晶器非正弦振动装置的设计及研究。
二、设计思路1. 设计背景与需求分析在连铸过程中,结晶器的振动对铸坯的质量有着直接的影响。
传统的正弦振动方式在某些情况下可能导致铸坯表面出现裂纹、夹渣等缺陷。
因此,设计一种非正弦振动装置,以更好地适应不同的连铸工艺需求,提高铸坯质量,成为我们的主要设计目标。
2. 设计原理及结构非正弦振动装置的设计基于对连铸工艺的深入理解和对结晶器振动特性的研究。
该装置主要由振动源、传动系统、支撑系统和控制系统等部分组成。
其中,振动源采用特殊的驱动装置,通过传动系统将动力传递给结晶器,实现非正弦振动。
同时,通过控制系统对振动参数进行精确控制,以满足不同的连铸工艺需求。
三、装置设计1. 振动源设计振动源是整个非正弦振动装置的核心部分,其性能直接影响到整个装置的振动特性。
我们采用特殊的驱动装置作为振动源,该驱动装置具有高精度、高效率、低噪音等特点,能够输出非正弦振动信号。
2. 传动系统设计传动系统负责将振动源的动力传递给结晶器。
我们采用先进的齿轮传动和皮带传动相结合的方式,确保动力传递的平稳性和可靠性。
同时,传动系统还具有过载保护功能,当设备出现过载时,能够自动停止运行,保护设备免受损坏。
3. 支撑系统设计支撑系统负责支撑整个装置,保证其稳定运行。
我们采用高强度、高稳定性的材料制作支撑系统,确保其在高温、高湿等恶劣环境下仍能保持稳定的性能。
4. 控制系统设计控制系统负责对整个装置的运行进行精确控制。
我们采用先进的计算机控制系统,通过编程实现对振动参数的精确控制。