电涡流位移传感器介绍
- 格式:pdf
- 大小:316.02 KB
- 文档页数:10

电涡流传感器系统的工作原理是电涡流效应,属于一种电感式测量原理。
电涡流效应源自振荡电路的能量。
而电涡流需要在可导电的材料内才可以形成。
给传感器探头内线圈导入一个交变电流以在探头线圈周围形成一个磁场。
如果将一个导体放入这个磁场,根据法拉第电磁感应定律激发出电涡流。
根据楞兹定律,电涡流的磁场方向与线圈磁场正好相反,而这将改变探头内线圈的阻抗性能参数测量量程1mm 2mm 4mm 5mm 12.5mm 20mm 25mm 50mm探头直径Φ6mm Φ8mm Φ11mm Φ17mm Φ30mm Φ40mm Φ50mm Φ60mm线性误差≤±0.25 ≤±0.25 ≤±0.5 ≤±0.5 ≤±1 ≤±1 ≤±1 ≤±2 (%FS)分辨率0.05um 0.1um 0.2um 0.25um 0.625um 1.0um 1.25um 2.5um重复性0.1um 0.2um 0.4um 0.5um 1.25um 2.0um 2.5um 5um频率响应0~10KHz 0~8KHz 0~2KHz 0~1KHz (-3dB)输出信号0~5V,0~10V,4~20mA,RS485电压型+9~18VDC,+18~36VDC或±15V~±18VDC可选供电电压电流型+22~30VDC,RS485型+12VDC电压型<45mA工作电流电流型<25mARS485型<40mA纹波≤20mV系统温漂≤0.05%/℃静态灵敏度根据输出信号和对应量程而定电压输出:负载能力<10KΩ输出负载电流输出:负载能力<500Ω标定时(20±5)℃环境温度探头-30℃~+150℃使用温度前置器-30℃~+85℃探头 IP67防护等级前置器 IP65探头电缆默认2m,可定制电源电缆默认2m,可定制接线定义电流型电压型RS485 棕线电源正 +24VDC 电源正 +12VDC或+24VDC 电源正 +12VDC黑线空电源负 0V 电源负 0V蓝线电流输出 OUT 输出正 OUT+ RS485 A+白线空输出负 OUT- RS485 B-屏蔽线接大地 GND 接大地 GND 接大地 GND探头典型结构图示在制作过程中,探头头部体一般采用耐高温ABS+PC工程塑料,通过“二次注塑”成型将线圈密封其中。
一文读懂电涡流位移传感器的工作机理电涡流位移传感器利用感应涡流原理,可以在一定范围内有效地测量位移或距离的变化。
当金属被测物体靠近探头时,根据位移或距离不同,电涡流位移传感器输出不同的电压,从而对照算出位移的变化量。
电涡流位移传感器主要由探头、前置器、连接电缆三部分构成。
探头内置线圈,使用与接近开关类似。
前置器通常使用盒式密封设计,前置器电路主要包括振荡电路、电压检测电路、放大器三部分,电压型电涡流位移传感器的前置器一般引出5个接线端子,即电源正+12VDC(或+24 V DC)、电源负、输出正OUT+、输出负OUT-、接地GND。
连接电缆两端分别接探头和前置器。
电涡流位移传感器的工作机理如下:前置器内部的振荡电路产生高频振荡电流,该高频振荡电流经连接电缆进入探头内置线圈,探头由此产生高频变化的磁场。
当金属被测物体靠近探头的较近位置时,金属被测物体产生涡流。
涡流再生涡流磁场,磁力线方向与探头线圈相反,由此改变了探头的阻抗,引起振荡电路的振荡电压幅值发生变化。
变化后的振荡电压经电压检测电路并滤波放大后,形成输出电压。
由此可见,位移变化引起输出电压变化就是电涡流位移传感器的工作机理。
电涡流效应和多项参数有关,如金属被测物体的电导率、磁导率、探头线圈直径、探头与金属被测物体的距离、振荡频率等。
在电涡流位移传感器中,探头直径对量程、分辨率有着重要影响。
表1以嘉可
JK型电涡流位移传感器的参数为例,列举了不同探头直径的量程、分辨率、线性误差。
由表1数据可见,探头直径越大,量程越大,但分辨率越低,线性误差越大。
电涡流式位移传感器实验报告电涡流式位移传感器是一种能够测量目标物体相对于传感器的位移的设备。
它利用了电涡流效应,通过感应电磁场的变化来获取目标物体的位移信息。
电涡流效应是指当导体材料处于变化的磁场中时,会产生涡流。
这种涡流会导致导体内部的能量损耗,并产生一个反向的电磁场。
根据这个原理,电涡流式位移传感器通过测量涡流的大小和方向来确定目标物体的位移情况。
电涡流式位移传感器由传感器头和信号处理电路组成。
传感器头通常由导体线圈制成,将其安装在测量物体附近。
当目标物体发生位移时,导体线圈中的磁场也会发生变化,从而引起涡流的产生。
信号处理电路会对涡流信号进行采集和处理,最终输出位移的数值。
电涡流式位移传感器具有许多优点。
首先,它可以实时、精确地测量目标物体的位移,具有很高的测量精度。
其次,它不需要与测量目标物体直接接触,可以在非接触的情况下进行测量,避免了由于接触导致的误差和磨损。
此外,电涡流式位移传感器还具有响应速度快、抗干扰能力强等特点。
在实际应用中,电涡流式位移传感器被广泛应用于各种领域。
例如,在机械制造行业中,它可以用于测量机械零件的位移和变形,以确保机械设备的正常运行。
在航空航天领域,电涡流式位移传感器可以用于测量飞机结构的变形情况,以保证飞机的安全。
此外,它还可以应用于汽车制造、电子设备、医疗器械等领域。
然而,电涡流式位移传感器也存在一些局限性。
首先,它对目标物体的材料有一定的要求,只有导电性较好的材料才能产生涡流效应。
其次,传感器的测量范围相对较小,对于大范围的位移测量可能不适用。
此外,电涡流式位移传感器的成本较高,不适合用于一些低成本的应用场景。
电涡流式位移传感器是一种能够实时、精确地测量目标物体位移的设备。
它通过利用电涡流效应来感应目标物体的位移,并将其转化为电信号输出。
电涡流式位移传感器在各个领域有着广泛的应用,但也存在一些局限性。
随着科技的不断进步,电涡流式位移传感器将会得到更广泛的应用和发展。
电涡流位移传感器的原理及其静态标定方法电涡流是20世纪70年代以后发展较快的一种新型传感器,它广泛的应用在位移震动检测、金属材质鉴别,无损探伤等技术领域。
实验目的:了解电涡流位移传感器的结构和工作原理。
了解电涡流位移传感器的静态标定方法。
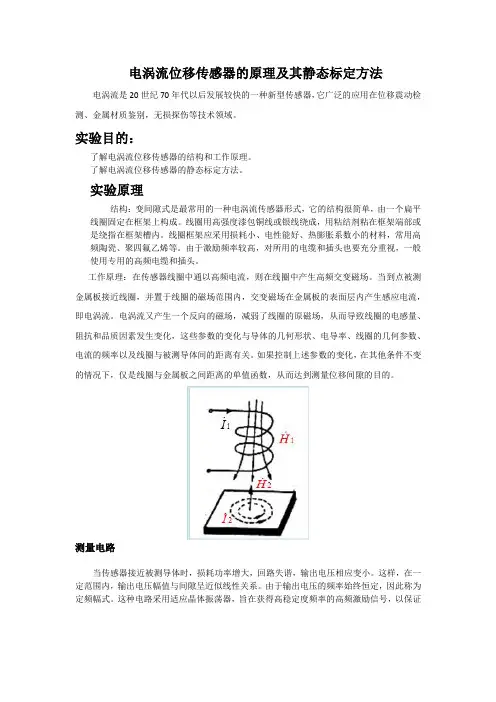
实验原理结构:变间隙式是最常用的一种电涡流传感器形式,它的结构很简单,由一个扁平线圈固定在框架上构成。
线圈用高强度漆包铜线或银线绕成,用粘结剂粘在框架端部或是绕指在框架槽内。
线圈框架应采用损耗小、电性能好、热膨胀系数小的材料,常用高频陶瓷、聚四氟乙烯等。
由于激励频率较高,对所用的电缆和插头也要充分重视,一般使用专用的高频电缆和插头。
工作原理:在传感器线圈中通以高频电流,则在线圈中产生高频交变磁场。
当到点被测金属板接近线圈,并置于线圈的磁场范围内,交变磁场在金属板的表面层内产生感应电流,即电涡流。
电涡流又产生一个反向的磁场,减弱了线圈的原磁场,从而导致线圈的电感量、阻抗和品质因素发生变化,这些参数的变化与导体的几何形状、电导率、线圈的几何参数、电流的频率以及线圈与被测导体间的距离有关。
如果控制上述参数的变化,在其他条件不变的情况下,仅是线圈与金属板之间距离的单值函数,从而达到测量位移间隙的目的。
测量电路当传感器接近被测导体时,损耗功率增大,回路失谐,输出电压相应变小。
这样,在一定范围内,输出电压幅值与间隙呈近似线性关系。
由于输出电压的频率始终恒定,因此称为定频幅式。
这种电路采用适应晶体振荡器,旨在获得高稳定度频率的高频激励信号,以保证稳定的输出。
实验仪器与材料电涡流位移传感器静态标定系统Hz-8500探头前置器8511型电涡流探头电涡流传感器测量装置高精度数字万用表。
实验内容:实验一:被测金属板采用铝质板,测量U-x 关系曲线。
实验二:被测金属板仍采用铝质板,但直径较小,测量U-x 关系曲线。
实验三:被测金属板采用铁板,测量U-x 关系曲线。
5、实验数据:实验一数据:6、实验要求:1、画出(实验一)中的U-x 关系曲线,确定传感器的线性工作范围计算传感器的灵敏度。
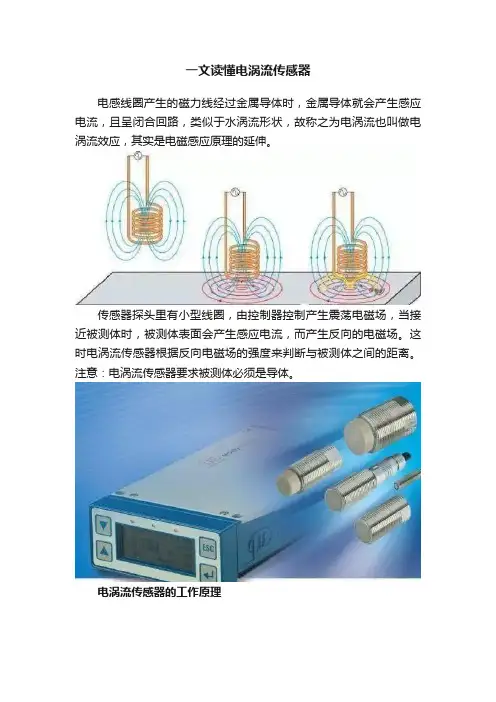
一文读懂电涡流传感器电感线圈产生的磁力线经过金属导体时,金属导体就会产生感应电流,且呈闭合回路,类似于水涡流形状,故称之为电涡流也叫做电涡流效应,其实是电磁感应原理的延伸。
传感器探头里有小型线圈,由控制器控制产生震荡电磁场,当接近被测体时,被测体表面会产生感应电流,而产生反向的电磁场。
这时电涡流传感器根据反向电磁场的强度来判断与被测体之间的距离。
注意:电涡流传感器要求被测体必须是导体。
电涡流传感器的工作原理当接通传感器系统电源时,在前置器内会产生一个高频信号,该信号通过电缆送到探头的头部,在头部周围产生交变磁场H1。
如果在磁场H1的范围没有金属导体接近,则发射到这一范围内的能量都会被释放;反之,如果有金属导体接近探头头部,则交变磁场H1将在导体的表面产生电涡流场,该电涡流场也会产生一个方向与H1相反的交变磁场H2。
由于H2的反作用,就会改变探头头部线圈高频电流的幅度和相位,即改变了线圈的有效阻抗。
这种变化与电涡流效应有关,也与静磁学效应有关(与金属导体的电导率、磁导率、几何形状、线圈几何参数、激励电流频率以及线圈到金属导体的距离参数有关)。
假定金属导体是均质的,其性能是线形和各向同性的,则线圈——金属导体系统的磁导率u、电导率σ、尺寸因子r、线圈与金属导体距离δ线圈激励电流I和频率ω等参数来描述。
因此线圈的阻抗可用函数Z=F(u,σ,r,δ,I,ω)来表示。
如果控制u,σ,r,I,ω恒定不变,那么阻抗Z就成为距离的单值函数,由麦克斯韦尔公式,可以求得此函数为一非线形函数,其曲线为“S”型曲线,在一定范围内可以近似为一线形函数。
通过前置器电子线路的处理,将线圈阻抗Z的变化,即头部体线圈与金属导体的距离δ的变化转化成电压或电流的变化。
输出信号的大小随探头到被测体表面之间的间距而变化,电涡流传感器就是根据这一原理实现对金属物体的位移、振动等参数的测量。
一般来说,传感器线圈的阻抗、电感和品质因数的变化与导体的几何形状、导电率和磁导率有关。
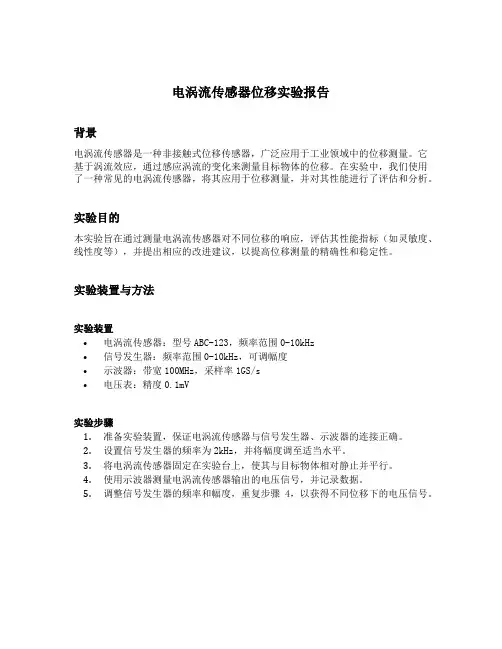
电涡流位移传感器的使用说明一、原理非接触式电涡流位移传感器'>传感器,是基于高频磁场在金属表面的涡流效应而成,是对金属物体的位移、振动、转速等机械量进行检测和控制的理想传感器。
它具有非接触测量、线性范围宽、灵敏度高、抗干扰能力强、无介质影响、稳定可靠、易于处理等明显优点,广泛用于冶金、化工、航天等行业中,也可用于科研和学校实验中的位移、振动、转速、长度、厚度、表面不平度等机械量的检测。
目前我公司生产的电涡流式传感器有两大类:位移、和转速传感器。
二、 MLW3300型位移、振动传感器1、量程: 250 .m----- 20mm2、线性误差:0.5% ~3.5%3、分辨率:0.05%(静态)0.1%(动态)。
4、频率响应:0 ~ 10KHz(0 ~ 2KHz, 0.5%, 2 ~ 10KHz 1%)5、工作温度:―20℃~100℃ (常温)―40℃~160℃ (高温)6、温度漂移:0.08%/℃(F.S)7、探头外径:Ф6~Ф65(mm)8、安装部分尺寸:a: M10 1 50. (量程 2mm)b: ф13 50. (量程 15mm)c: ф18 50. (量程 15mm)(注:尾架可根据用户要求定制)三、HR2000型前置变换器前置变换器的型号分为:1、信号输出:a: 非标准电压输出,(BZF Ⅰ)b: 0~~ 2V, 0~~ 5V,0~10V.(BZF―Ⅱ)C: 4~20mA. (BZF―Ⅲ)2、供电电源:a: 15~24V (BZF―Ⅰ,BZF―Ⅱ)b: ―20~30V (BZF―Ⅲ)(用户可选配本公司ZY-A型专用电源)3、接线:四芯航空插头①负电源, ②正电源,③信号输出,④公共地(4―20mA输出②脚为空脚)4、工作温度:0℃~65℃5、有容错装置,不会因电源接错而烧毁。
四、位移传感器的连接和标定1、传感器与前置变换器的连接①、通过高频连接,标准长度为3米。
②、最大可加长至9米,需订货时说明。
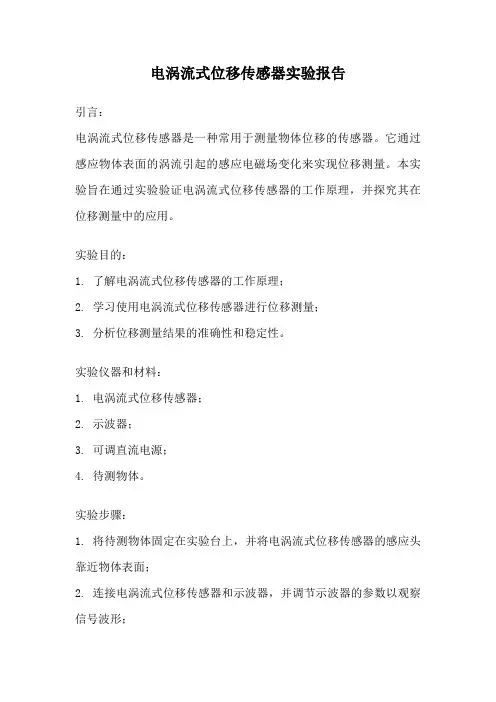
电涡流传感器位移实验报告背景电涡流传感器是一种非接触式位移传感器,广泛应用于工业领域中的位移测量。
它基于涡流效应,通过感应涡流的变化来测量目标物体的位移。
在实验中,我们使用了一种常见的电涡流传感器,将其应用于位移测量,并对其性能进行了评估和分析。
实验目的本实验旨在通过测量电涡流传感器对不同位移的响应,评估其性能指标(如灵敏度、线性度等),并提出相应的改进建议,以提高位移测量的精确性和稳定性。
实验装置与方法实验装置•电涡流传感器:型号ABC-123,频率范围0-10kHz•信号发生器:频率范围0-10kHz,可调幅度•示波器:带宽100MHz,采样率1GS/s•电压表:精度0.1mV实验步骤1.准备实验装置,保证电涡流传感器与信号发生器、示波器的连接正确。
2.设置信号发生器的频率为2kHz,并将幅度调至适当水平。
3.将电涡流传感器固定在实验台上,使其与目标物体相对静止并平行。
4.使用示波器测量电涡流传感器输出的电压信号,并记录数据。
5.调整信号发生器的频率和幅度,重复步骤4,以获得不同位移下的电压信号。
数据分析与结果实验数据我们通过实验获得了电涡流传感器在不同位移下的电压信号数据,如下所示:位移 (mm) 电压 (mV)0 1.21 1.52 1.83 2.14 2.45 2.7曲线拟合与性能评估我们将实验数据进行曲线拟合,以评估电涡流传感器的性能指标。
首先,我们使用最小二乘法对数据进行线性拟合。
得到的拟合直线的方程为:V = 0.3d + 1.2其中V表示电压(mV),d表示位移(mm)。
通过拟合直线,我们可以计算出电涡流传感器的灵敏度为0.3 mV/mm,表示单位位移引起的电压变化量。
其次,我们计算了电涡流传感器的线性度。
线性度是衡量传感器输出与输入之间线性关系程度的指标,通常以百分比表示。
通过计算每个数据点与拟合直线之间的残差,并将其转化为线性度,我们得到了电涡流传感器的线性度为95%。
结果分析与建议通过对实验数据的分析和性能评估,我们得到了以下结论:1.电涡流传感器表现出良好的线性关系,其灵敏度为0.3 mV/mm。
电涡流式位移传感器实验报告引言:电涡流式位移传感器是一种常用于测量物体位移的传感器。
它通过感应物体表面的涡流引起的感应电磁场变化来实现位移测量。
本实验旨在通过实验验证电涡流式位移传感器的工作原理,并探究其在位移测量中的应用。
实验目的:1. 了解电涡流式位移传感器的工作原理;2. 学习使用电涡流式位移传感器进行位移测量;3. 分析位移测量结果的准确性和稳定性。
实验仪器和材料:1. 电涡流式位移传感器;2. 示波器;3. 可调直流电源;4. 待测物体。
实验步骤:1. 将待测物体固定在实验台上,并将电涡流式位移传感器的感应头靠近物体表面;2. 连接电涡流式位移传感器和示波器,并调节示波器的参数以观察信号波形;3. 通过调节可调直流电源的电压,改变电涡流式位移传感器的工作距离,记录不同工作距离下的信号波形;4. 根据示波器上的信号波形,计算出不同工作距离下的位移值;5. 重复上述步骤,以获得多组位移测量数据。
实验结果和分析:根据实验记录的信号波形和位移测量数据,可以得出以下结论:1. 电涡流式位移传感器的工作距离与信号波形的变化呈反比关系,即工作距离越小,信号波形的振幅越大;2. 通过对信号波形的观察和分析,可以较准确地计算出位移值;3. 在一定范围内,电涡流式位移传感器的测量结果具有较高的准确性和稳定性。
实验结论:通过本实验,验证了电涡流式位移传感器的工作原理,并探究了其在位移测量中的应用。
实验结果表明,电涡流式位移传感器具有较高的测量精度和稳定性,在工业自动化控制和机械加工等领域有着广泛的应用前景。
参考文献:[1] Xie Y, Zhang H, Fu C, et al. Design and fabrication of an eddy current displacement sensor[J]. Sensors, 2018, 18(10): 3243.[2] Wei D, Zhao J, Yan Y. Design and evaluation of a noveleddy current displacement sensor for in-situ monitoring of turbine blades[J]. IEEE Sensors Journal, 2019, 19(13): 5284-5291.。
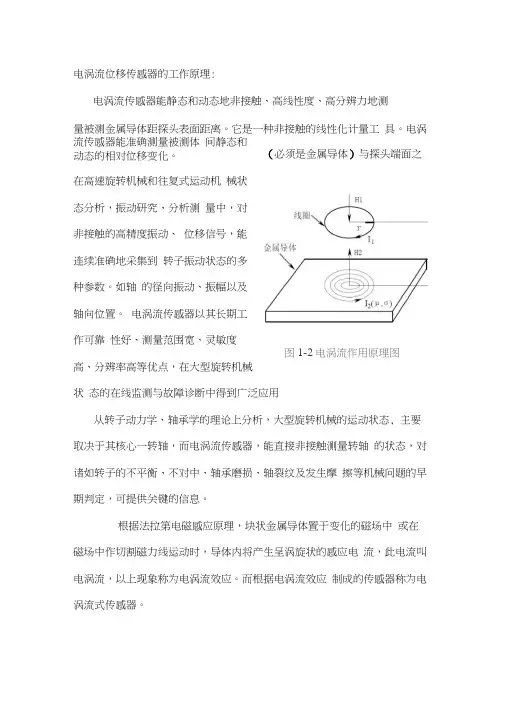
电涡流位移传感器的工作原理:电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面距离。
它是一种非接触的线性化计量工 具。
电涡流传感器能准确测量被测体 间静态和动态的相对位移变化。
在高速旋转机械和往复式运动机 械状态分析,振动研究、分析测 量中,对非接触的高精度振动、 位移信号,能连续准确地采集到 转子振动状态的多种参数。
如轴 的径向振动、振幅以及轴向位置。
电涡流传感器以其长期工作可靠 性好、测量范围宽、灵敏度高、分辨率高等优点,在大型旋转机械状 态的在线监测与故障诊断中得到广泛应用从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态, 主要取决于其核心一转轴,而电涡流传感器,能直接非接触测量转轴 的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩 擦等机械问题的早期判定,可提供关键的信息。
根据法拉第电磁感应原理,块状金属导体置于变化的磁场中 或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感应电 流,此电流叫电涡流,以上现象称为电涡流效应。
而根据电涡流效应 制成的传感器称为电涡流式传感器。
(必须是金属导体)与探头端面之 图1-2电涡流作用原理图前置器中高频振荡电流通过延伸电缆流入探头线圈, (「 (<' --------- VV -------A f 戦测金屈导伟图卜4传感器输出特性曲线在探头头部的线圈中 产生交变的磁场。
当被测金属体靠近这一磁场,则在此金属表面产生 感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反 的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到 改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的 几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离 等参数有关。
通常假定金属导体材质均匀且性能是线性和各项同性, 则线圈和金属导体系统的物理性质可由金属导体的电导率 6、磁导 率E 、尺寸因子T 、头部体线圈与金属导体表面的距离 D 电流强 度I 和频率3参数来描述。
电涡流位移传感器原理电涡流位移传感器是一种常用于测量金属表面位移的传感器,它利用了涡流的原理来实现非接触式的位移测量。
在工业领域,电涡流位移传感器被广泛应用于机械加工、汽车制造、航空航天等领域,具有高精度、高灵敏度和长寿命等优点。
电涡流位移传感器的原理基于法拉第电磁感应定律和涡流的概念。
当导体相对于磁场运动时,会在导体内产生涡流。
根据涡流的特性,当金属表面有位移时,导体内的涡流也会发生变化。
电涡流位移传感器正是利用了这一原理,通过测量涡流的变化来实现对金属表面位移的精确测量。
电涡流位移传感器由激励线圈和感应线圈组成。
激励线圈通电产生交变磁场,而感应线圈则用来检测金属表面涡流的变化。
当金属表面发生位移时,涡流的密度和分布都会发生改变,从而影响感应线圈中感应电动势的大小和频率。
通过测量感应电动势的变化,就可以得到金属表面的位移信息。
电涡流位移传感器具有高精度和高灵敏度的特点,可以实现微小位移的测量。
由于其非接触式的测量方式,不会对被测金属表面造成损伤,因此在一些对被测物体表面要求严格的场合,电涡流位移传感器具有独特的优势。
此外,电涡流位移传感器还具有快速响应和长寿命的特点。
由于其工作原理的特殊性,电涡流位移传感器不受被测物体表面特性的影响,可以适用于各种金属材料的位移测量。
因此,在工业生产中,电涡流位移传感器被广泛应用于各种机械零件的位移监测和质量控制。
总之,电涡流位移传感器利用了涡流的原理,实现了对金属表面位移的精确测量。
它具有高精度、高灵敏度、非接触式测量、快速响应和长寿命等优点,在工业领域具有广泛的应用前景。
随着科技的不断进步,电涡流位移传感器的性能将得到进一步提升,为工业生产提供更加可靠、高效的位移测量解决方案。
电涡流位移传感器的原理集团标准化工作小组 [Q8QX9QT-X8QQB8Q8-NQ8QJ8-M8QMN]电涡流位移传感器的工作原理:电涡流能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
在高速旋转机械和往复式运动机械状态分析,振动研究、分析测量中,对非接触的高精度振动、位移信号,能连续准确地采集到转子振动状态的多种参数。
如轴的径向振动、振幅以及轴向位置。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。
从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态,主要取决于其核心—转轴,而电涡流传感器,能直接非接触测量转轴的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的早期判定,可提供关键的信息。
根据法拉第电磁感应原理,块状金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感应电流,此电流叫电涡流,以上现象称为电涡流效应。
而根据电涡流效应制成的传感器称为电涡流式传感器。
前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。
当被测金属体靠近这一磁场,则在此金属表面产生感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。
通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。
则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。
电涡流位移传感器工作原理小伙伴们!今天咱们来唠唠电涡流位移传感器这个超有趣的东西。
你知道吗?电涡流位移传感器就像是一个超级敏感的小侦探呢。
它主要是利用电涡流效应来工作的。
啥是电涡流效应呢?想象一下,你在一个平静的湖面上丢了一颗小石子,会激起一圈圈的涟漪吧。
在传感器的世界里,当一个通有交变电流的线圈靠近金属导体的时候,就会在金属导体里产生像那湖面上的涟漪一样的电涡流啦。
这个电涡流可不得了哦。
它会产生自己的磁场,这个磁场呢就会和原来线圈产生的磁场相互作用。
就像是两个小怪兽在打架一样,你影响我,我影响你。
当金属导体靠近或者远离传感器的线圈时,电涡流的大小就会发生变化呢。
为啥会这样呢?因为距离不一样了呀,就好像你和朋友之间的距离变了,你们之间的相互影响也就不一样了。
那这个变化有啥用呢?这可太有用啦。
传感器就是靠着检测这个电涡流的变化来知道金属导体的位移情况的。
比如说,在一个机器设备里,有个金属零件在来回移动。
电涡流位移传感器就像一个小眼睛一样盯着这个零件的位移。
如果这个零件移动得太离谱了,传感器就能马上发现,然后给其他设备发出信号,就像在喊:“那个零件跑错地方啦,快管管它!”这个传感器的线圈就像是一个魔法圈。
交变电流通过它的时候,就像给这个魔法圈注入了魔力。
当有金属靠近时,电涡流产生的磁场就会让这个魔法圈的魔力发生变化。
这种变化可以被转化成各种信号,比如电信号。
就好像魔法圈把它看到的金属的位移情况用一种特殊的语言告诉了其他设备。
而且哦,电涡流位移传感器还特别聪明呢。
它可以在很多不同的环境里工作。
不管是有点小灰尘的地方,还是有点小震动的地方,它都能坚守岗位。
不过呢,它也有自己的小脾气。
如果周围的环境太恶劣了,比如说温度特别高或者有很强的电磁干扰,它可能就会有点小迷糊啦。
在一些大型的工业设备里,电涡流位移传感器可是大功臣呢。
比如说在汽轮机里,那些高速旋转的金属部件的位移都得靠它来监测。
要是没有它,那些部件一旦发生位移异常,可能就会引发大事故呢。
电涡流位移(振动)传感器原理与应用电涡流传感器能静态和动向地非接触、高线性度、高分辨力地丈量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能正确丈量被测体(一定是金属导体)与探头端面之间静态和动向的相对位移变化。
在高速旋起色械和来去式运动机械的状态分析,振动研究、剖析丈量中,对非接触的高精度振动、位移信号,能连续正确地收集到转子振动状态的多种参数。
如轴的径向振动、振幅以及轴向地点。
从转子动力学、轴承学的理论上剖析,大型旋起色械的运动状态,主要取决于其中心—转轴,而电涡流传感器,能直接非接触丈量转轴的状态,对诸如转子的不均衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的初期判断,可供给重点的信息。
电涡流传感器以其长期工作靠谱性好、丈量范围宽、敏捷度高、分辨率高、响应速度快、抗扰乱力强、不受油污等介质的影响、构造简单等长处,在大型旋起色械状态的在线监测与故障诊疗中获得宽泛应用。
一、电涡流传感器的基来源理依据法拉第电磁感觉原理,块状金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感觉电流,此电流叫电涡流,以上现象称为电涡流效应。
而依据电涡流效应制成的传感器称为电涡流式传感器。
前置器中高频振荡电流经过延长电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。
当被测金属体凑近这一磁场,则在此金属表面产生感觉电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,因为其反作用,使头部线圈高频电流的幅度和相位获得改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频次以及头部线圈到金属导体表面的距离等参数相关。
往常假设金属导体材质平均且性能是线性和各项同性,则线圈和金属导系统统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离 D、电流强度 I 和频次ω参数来描绘。
则线圈特色阻抗可用 Z=F(τ, ξ, б, D, I, ω) 函数来表示。