车载式绿篱修剪机的设计与仿真
- 格式:pdf
- 大小:907.10 KB
- 文档页数:4
基于STM32单片机的智能绿篱修剪机的设计摘要:由于绿化养护设备的应用范围不断扩大,未来十年,国内绿化养护设备的市场容量有望达到400亿元。
然而,目前国内绿化养护设备的市场现状存在两大问题:功能单一和自动化程度低。
这些局限性阻碍了它的进一步推广和广泛应用。
绿篱种植面积的指数级增长,使绿篱的维护和修剪成为一项日益重要的任务。
然而这项任务的市场需求量大大增加了对于劳动力的需求,而路边修剪作业中频繁发生的交通事故对工人的安全构成了重大威胁。
本文在现有车载电动绿篱修剪机的基础上,提出了基于STM32微控制器的智能绿篱修剪机的总体设计方案。
该设计是对国内外绿篱修剪机的现状和发展趋势进行全面比较和分析后的结果。
其成本低廉,工作效率高,结构简单。
在设计了硬件方案与软件方案后,对整机系统进行了模拟仿真,子系统的优化设计等。
本文设计的智能绿篱修剪机相较于现有的车载式绿篱机,大幅优化了结构重量,降低了生产作业成本,提高了实际作业中的安全系数,这对提高产品的市场竞争力与性价比具有重要意义。
关键词:绿篱修剪机;STM32单片机;电子控制;远程控制1引言随着中国城市化进程的加快,人们对于环保化,生态化的道路绿化环境的需求不断提高。
这种需求导致了园林养护行业市场的扩大,也对园林企业的设计、技术水平和施工能力提出了更高的要求[1]。
绿篱种植面积的指数级增长,使绿篱的维护和修剪成为一项日益重要的任务,园林养护的市场需求量大大增加了对于劳动力的需求,而路边修剪作业中频繁发生的交通事故对工人的安全构成了重大威胁。
统计数据显示,路边事故在所有交通事故中占到了惊人的30%,凸显了解决这一问题的严重性和紧迫性。
园林企业面临着众多挑战,包括繁重的工作量、安全问题、技术专长、季节性变化和环境因素,所有这些都必须仔细管理,以确保绿篱的健康和外观,同时维护工人的安全。
2绿篱修剪机国内外研究现状(1)国外现状国外绿篱机的历史跨越了几十年,从最初的手动大剪刀式发展到背负便携式绿篱机,最后发展到具有独立动力的机动式修剪机。
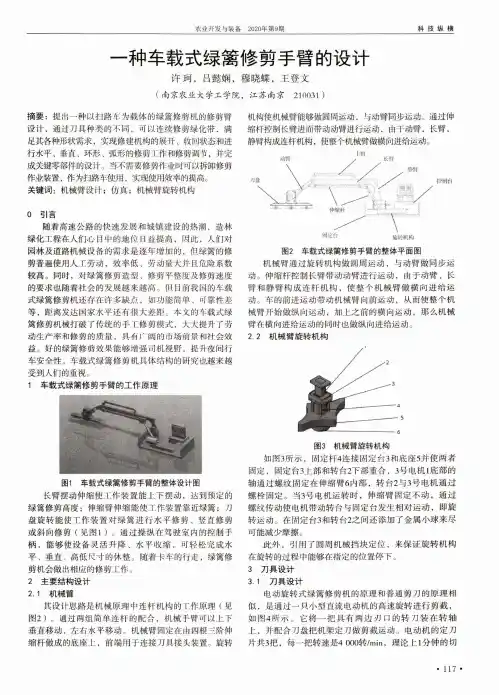
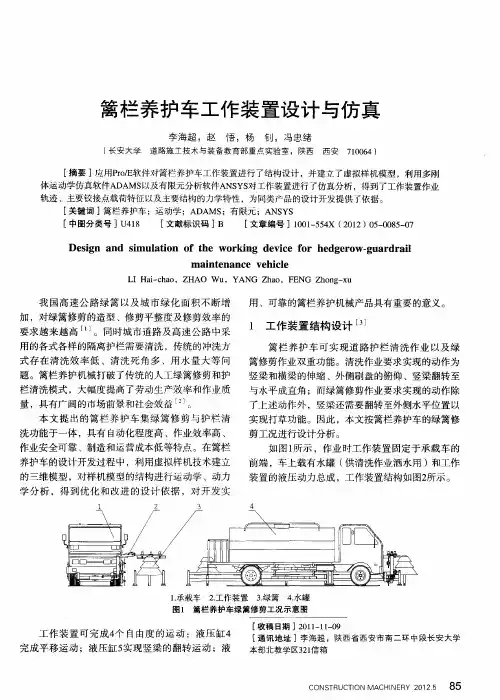
农业开发与装备2020年第9期科技纵横一种车载式绿篱修剪手臂的设计许珂,吕懿娴,穆晓蝶,王登文(南京农业大学工学院,江苏南京210031 )摘要:提出一种以扫路车为载体的绿篱修剪机的修剪臂 设计,通过刀具种类的不同,可以连续修剪绿化带,满 足其各种形状需求,实现修建机构的展开、收回状态和进 行水平、垂直、环形、弧形的修剪工作和修剪调节,并完 成关键零部件的设计。
当不需要修剪作业时可以拆卸修剪 作业装置,作为扫路车使用,实现使用效率的提高。
关键词:机械臂设计;仿真;机械臂旋转机构〇引言随着高速公路的快速发展和城镇建设的热潮,造林 绿化工程在人们心目中的地位日益提高,因此,人们对 园林及道路机械设备的需求是逐年增加的,但绿篱的修 剪普遍使用人工劳动,效率低、劳动量大并且危险系数 较高。
同时,对绿篱修剪造型、修剪平整度及修剪速度 的要求也随着社会的发展越来越高。
但目前我国的车载 式绿篱修剪机还存在许多缺点,如功能简单、可靠性差 等,距离发达国家水平还有很大差距。
本文的车载式绿 篱修剪机械打破了传统的手工修剪模式,大大提升了劳 动生产率和修剪的质量,具病'广阔的市场前景和社会效 益。
好的绿篱修剪效果能够增强司机视野,提升夜间行 车安全性。
车载式绿篱修剪机具体结构的研究也越来越 受到人们的重视。
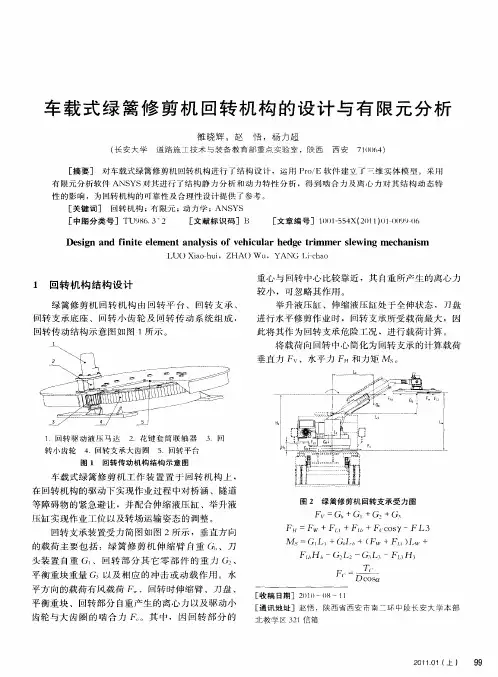
1车载式绿篱修剪手臂的工作原理图1车载式绿篱修剪手臂的整体设计图长臂摆动伸缩使工作装置能上下摆动,达到预定的 绿篱修剪高度;伸缩臂伸缩能使工作装置靠近绿篱;刀盘旋转能使工作装置对绿篱进行水平修剪、竖直修剪 或斜向修剪(见图1 )。
通过操纵在驾驶室内的控制手 柄,能够使设备灵活升降、水平收缩,可轻松完成水 平、垂直、高低尺寸的休整。
随着卡车的行走,绿篱修 剪机会做出相应的修剪工作。
2主要结构设计2.1机械臂其设计思路是机械原理中连杆机构的工作原理(见 图2)。
通过两组简单连杆的配合,机械手臂可以上下 垂直移动,左右水平移动。
绿化带修剪机的设计0摘要本课题设计的绿化带修剪机设计方案,通过利用互联网、图书馆查阅相关资料,充分了解国内外绿化带修剪机的发展现状,分析明确了修剪机的未来发展趋势,真实去到相应生产企业,实地观看和了解普通绿化带修剪机的生产过程和情况。
最终通过三维建模软件,建立三维模型;利用CAD二维软件,绘制总成图和部分零件图。
该设计方案的结构是由底座主传动系统,车载机架,动臂机构,切割机构四大部分组成。
底座旋转系统安装在汽车底盘上,发动机总成,底盘驱动装置,和支撑底板骨架结构是通过回转驱动来实现的。
这种设备可用于修剪高枝树篱、灌木、树枝等。
关键词:绿化带条形刀片液压传动切割1 设计内容这次设计的课题是针对绿化带修剪机。
它主要靠大型柴油机为原始动力,通过轴传动带动四组刀具进行高枝修剪作业。
主要包括主传动系统的设计、切割机构的设计和机架的设计。
通过查阅有关资料选择相关参数及材料,对原动机,车载底盘,液压系统,机架主体等主要部件进行选型设计。
本次设计的目的在于使该装置的设计贴近实际应用,为园林植被的修剪,割灌作业及培育提供更多便利条件。
设计出工作平稳,操作简单,割茬整齐,所需功率较小的具有综合性能的修剪机。
为了可以适用于不同的修剪作业,本次设计的绿化带修剪机是一种一体式修剪机,可以用于大面积的修剪灌木高枝的园林作业。
2 绿化带修剪机的总体方案设计2.1 绿化带修剪机行走机构选择由于人工种植的柏树的生存环境各异,主要种植在高速园林两侧,对于行走似的转场要求较高。
所以对柏树的绿化带修剪机应该具备以下几种技术方面的要求:(1)因为高速园林两侧及中间地区种植情况各异,对于绿化带修剪机的载体车辆应具有一定的高速转场能力,以及低速行驶能能力和良好的通过性。
(2)因为柏树的高度较高,集中在5-6米,所以为了提高修剪机的整体使用性能能,控制割茬高度,定期定时修剪是和有必要的。
因此修剪机必须可以调整割刀箱的高度位置和宽度位置,以满足不同条件下的修剪工作任务。
机械系统设计-绿化带修剪机机械系统设计【绿化带修剪机】-刀具结构与传动设计机械工程学院学号:第 17 组姓名: 2021年07月06日0.引言随着社会的发展,交通日加便利,高速公路在现今生活中扮演着越来越重要的角色,对高速公路的养护也提出了新的要求。
高速公路中央绿化带是指高速公路中央绿化带修剪现阶段主要采取两种形式:人工修剪和人工手持油锯式修剪方式。
但这种修剪方式的缺点明显,效率低并存在安全问题,所以现在又提出一种车载式修剪机,汽车承载,刀架侧向伸出的形式。
提高了工作效率,也增加了工作安全性。
基于以上的情况,我们提出一种新的想法,将刀架放在汽车正前方或者正后方,汽车跨过护栏,利用护栏两侧的小空间进行行走,完成绿化带的修剪。
1. 功能要求高速公路中央绿化带修剪。
将刀架放在汽车正前方或者正后方,汽车跨过护栏,利用护栏两侧的小空间进行行走,完成绿化带的修剪。
设定高速公路中央绿化带形式为绿篱带,三面修剪,修剪宽度为1.4m,修剪高度为1.2―1.5m,最大修剪绿篱树枝直径为8mm,修剪时行驶速度0.5m/s。
22. 设计方案(原理)现有的绿篱修剪的刀具形式主要有旋转式刀具修剪和直线往复式刀具修剪两种形式,考虑成本及安装空间的影响,选用直线往复式刀具的形式设计刀具。
直线往复式刀具主要是依据剪刀原理,通过两个刀片的相对运动,实现侧向刀刃的啮合,最终达到修剪的目的。
目前市场上的刀片剪切的方式主要有两种,一种是两个刀片都运动,一种是只有一个刀片运动。
而刀片的运动多是通过将动力源传出的旋转动作转换为动刀片的直线往复运动。
出于成本以及刀具安装空间的考虑,选用单刀动作的方式,采用曲柄连杆机构实现直线往复运动。
2.1 刀片结构设计:由于修剪宽度较大,故单个刀刃设计较大,一方面可以增加单个刀刃的强度,另一方面也可以增强整个刀片的刚度,具体设计如下:3图2.1 主刀具二维图图2.2 主刀具刀刃局部图刀片均采用……材料,单刃长×宽=60*50mm,工作过程中,主刀组有效切削刀刃数为14个,有效切削宽度为1.4m,侧刀组有效切削刀刃数为8个,有效切削宽度为0.8m,刀刃中心线间距100mm,则刀片相对运动行程为100mm。
绿篱修剪机毕业设计绿篱修剪机毕业设计在现代社会中,人们对于美化环境的需求越来越高。
尤其是在城市中,由于土地有限,绿化空间变得尤为宝贵。
因此,绿篱修剪机作为一种能够快速、高效地修剪绿篱的工具,成为了人们日常生活中不可或缺的一部分。
本文将围绕绿篱修剪机的毕业设计展开讨论,探索其设计原理、功能特点以及未来发展趋势。
首先,绿篱修剪机的设计原理是基于机械剪切的原理。
通过电动或燃油驱动的动力系统,将刀片快速旋转,实现对绿篱的修剪。
这种设计原理使得绿篱修剪机具备了高效、精准的修剪能力,能够在短时间内完成大面积的修剪工作。
同时,绿篱修剪机还采用了人体工程学设计,使得操作更加方便、舒适,减轻了使用者的劳动强度。
其次,绿篱修剪机的功能特点是多样化的。
除了传统的修剪功能外,现代的绿篱修剪机还加入了一些创新的功能。
例如,一些绿篱修剪机配备了可调节刀片角度的功能,使得修剪更加灵活多样。
另外,一些高端的绿篱修剪机还具备自动导航功能,能够根据预设的路径自主完成修剪任务,提高了工作效率。
此外,还有一些绿篱修剪机具备了智能化的控制系统,能够根据不同的植物类型和修剪需求进行智能调整,保证修剪效果的一致性和美观性。
然而,绿篱修剪机在设计上还存在一些挑战。
首先是安全性问题。
由于修剪机的刀片具有很高的旋转速度,一旦操作不当,可能会对使用者造成伤害。
因此,在设计过程中,需要加入安全保护装置,如刀片锁定装置、电子刹车等,以确保使用者的安全。
其次是噪音和环境污染问题。
传统的绿篱修剪机通常使用燃油驱动,噪音和废气排放较大,对环境和周围居民造成一定的影响。
因此,未来的设计应该更加注重环保性能,采用电动驱动或其他清洁能源驱动方式,减少对环境的负面影响。
随着科技的不断进步,绿篱修剪机也在不断发展和创新。
未来,绿篱修剪机有望实现更加智能化和自动化。
例如,通过引入机器视觉技术,绿篱修剪机可以自动识别绿篱的形状和大小,调整刀片的工作方式,实现更加精准的修剪。


基于STM32自动定位功能的“绿植”修剪车设计随着人们生活水平的提高,绿化越来越成为城市建设的重要内容之一。
在城市绿化中,绿植修剪是常见的任务之一,传统的绿植修剪方式依赖人工完成,效率低下,对人员安全和绿植成长不利。
本文提出一种基于STM32自动定位功能的“绿植”修剪车设计方案。
设计方案主要分为四个模块:定位模块、车体模块、切割模块和控制模块。
其中定位模块主要负责实现车辆的准确定位和实时监测;车体模块主要负责车辆行动控制;切割模块主要负责切割绿植;控制模块主要负责系统的整体控制。
定位模块采用了STM32F407单片机作为主控芯片,通过GPS定位模块和电子罗盘获取车辆的当前位置和朝向,通过陀螺仪实时获取车辆角度信息,这些数据通过无线传输到控制模块进行处理。
车体模块主要由电机、减速机、电池、驱动芯片和无线通讯模块等组成,利用电机控制车轮转动,通过减速机实现车辆的移动,利用电池提供电能,驱动芯片控制电机正反转,无线通讯模块与定位模块进行通讯,实现定位和运动控制的协同。
切割模块主要由切割刀和驱动系统组成,利用马达带动刀片旋转,通过控制电机旋转速度和切割刀的位置高度,实现对绿植的切割。
控制模块负责系统运行的整体控制,通过实时处理定位模块传来的数据,采用PID控制算法,调节车辆运动的速度和方向,保证车辆准确前进至指定位置进行修剪操作。
总体来看,本设计采用STM32作为主控制器,实现自动定位和协同控制,通过优化系统硬件和软件设计,实现了对绿植的精准修剪。
该方案可以广泛应用于公共绿地、企事业单位的园林绿化、智能农业等领域,提高绿化效率,保障人员安全,对推动城市可持续发展起到积极促进作用。