自动控制原理西安交通大学张爱民
- 格式:pptx
- 大小:7.54 MB
- 文档页数:236
自动控制原理张爱民自动控制原理。
自动控制原理是现代控制工程中的基础课程,它主要研究自动控制系统的基本原理和方法。
自动控制系统是利用控制器对被控对象进行调节,使其输出符合要求的系统。
自动控制原理的学习对于掌握控制工程的基本理论和方法具有重要意义,也是掌握现代工程技术的基础。
自动控制原理的研究对象包括连续系统和离散系统。
连续系统是指系统的状态和控制信号是连续变化的,比如机械系统、电气系统等;离散系统是指系统的状态和控制信号是离散变化的,比如数字控制系统等。
掌握连续系统和离散系统的基本原理,对于理解和设计自动控制系统至关重要。
自动控制原理主要包括控制系统的建模、系统的稳定性分析、系统的性能指标、控制器的设计等内容。
控制系统的建模是指将实际系统抽象成数学模型,以便进行分析和设计。
系统的稳定性分析是指研究系统在外部扰动下的稳定性问题,以保证系统能够稳定工作。
系统的性能指标是指衡量系统性能好坏的指标,比如超调量、调节时间、静态误差等。
控制器的设计是指根据系统的性能指标和稳定性要求,设计出满足要求的控制器。
自动控制原理的学习需要掌握数学、物理、电子等多个学科的知识。
数学是自动控制原理的基础,包括微积分、线性代数、概率论等内容。
物理是自动控制原理的应用基础,包括力学、电路等内容。
电子是自动控制原理的工程基础,包括电子线路、数字信号处理等内容。
掌握这些基础知识,才能够深入理解自动控制原理的内容。
在实际工程中,自动控制原理被广泛应用于各种控制系统中,比如工业生产、航空航天、交通运输等领域。
掌握自动控制原理,可以帮助工程师设计出稳定性好、性能优越的控制系统,提高系统的自动化水平,提高工作效率,降低成本,提高生产质量。
总之,自动控制原理是现代控制工程中的基础课程,它对于掌握控制工程的基本理论和方法具有重要意义。
通过学习自动控制原理,可以掌握控制系统的建模、稳定性分析、性能指标、控制器设计等内容,为工程技术人员提供了强有力的工具,帮助他们设计出稳定性好、性能优越的控制系统,提高工作效率,降低成本,提高生产质量。
张爱民《自动控制原理》1. 引言《自动控制原理》是由张爱民教授编写的一本介绍自动控制理论和方法的教材。
自动控制是现代工程和科学领域中的一个重要学科,涉及到各个领域的控制问题,包括机械、电气、电子、通信等。
2. 作者简介张爱民,清华大学自动化系教授,是自动控制领域的知名专家。
他在自动控制理论和应用方面做出了很多重要贡献。
他主持和参与了多项国家级科研项目,在自动控制领域发表了大量论文。
张爱民教授的《自动控制原理》以其深入浅出的讲解风格和丰富的实例深受学生和教师的喜爱。
3. 内容概述《自动控制原理》一书共分为八章,内容涵盖了自动控制领域的基础理论和实践方法。
下面对每一章的主要内容进行简要介绍。
3.1 第一章:自动控制概述这一章介绍了自动控制的基本概念、分类和发展历程。
通过一些实例,帮助读者理解自动控制的重要性和应用领域。
3.2 第二章:数学基础在自动控制领域,数学是基础。
这一章主要介绍了自动控制所涉及到的数学基础,包括线性代数、微积分和概率论等。
读者可以通过这一章的学习,为后续章节打下坚实的数学基础。
3.3 第三章:系统建模系统建模是自动控制的第一步。
这一章介绍了系统建模的基本概念和方法,包括系统的描述、状态空间分析和传递函数表示等。
通过实例,读者可以学会如何将实际问题转化为数学模型。
3.4 第四章:传递函数的表示与分析传递函数是自动控制中常用的数学工具。
这一章详细介绍了传递函数的定义、性质和常见的运算规则。
同时,还介绍了用传递函数进行系统分析和设计的方法。
3.5 第五章:控制器的设计控制器是自动控制中的核心组成部分。
这一章主要介绍了控制器的设计方法,包括比例控制器、积分控制器和PID控制器等。
通过实例,读者可以学会如何选择和设计合适的控制器。
3.6 第六章:闭环控制系统分析闭环控制系统是自动控制中常用的控制方式。
这一章详细介绍了闭环控制系统的分析方法,包括系统的稳定性分析和性能指标的评价等。
读者可以通过这一章的学习,了解闭环控制系统的优势和局限性。
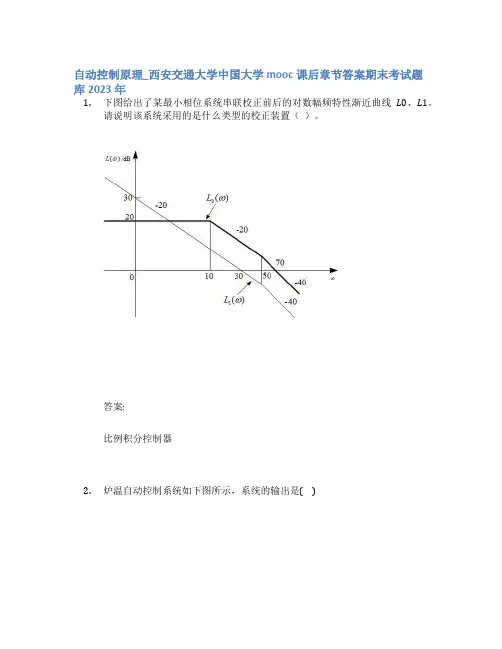
自动控制原理_西安交通大学中国大学mooc课后章节答案期末考试题库2023年1.下图给出了某最小相位系统串联校正前后的对数幅频特性渐近曲线L0、L1。
请说明该系统采用的是什么类型的校正装置()。
答案:比例积分控制器2.炉温自动控制系统如下图所示,系统的输出是( )答案:实际炉温3.系统特征方程为,使系统稳定的T的取值范围是()答案:T>654.开环传递函数,则实轴上的根轨迹为()答案:5.液位控制系统原理图如下图所示,系统的给定输入是()答案:期望液位6.如图所示反馈控制系统的典型结构图,=( )答案:7.已知最小相位系统的渐近幅频特性曲线如图所示,则系统传递函数为( )答案:8.液位控制系统原理图如下图所示,被控对象是()答案:水池9.已知单位反馈系统的开环传递函数为,当输入为单位阶跃函数时,系统的稳态误差为()答案:3/510.开环频域性能指标中的相角裕度对应时域性能指标()答案:超调%11.高阶系统的开环传递函数为:,则系统输入单位斜坡信号,系统的稳态误差为( )答案:1.512.在对某最小相位系统进行串联校正设计时,校正前后对数幅频特性渐近线分别如下图中曲线L0、L1所示。
请说明校正环节采用的是什么类型的校正装置及在单位斜坡输入下稳态误差的影响。
()答案:相位超前,增加13.校正环节是校正()答案:超前14.液位控制系统原理图如下图所示,系统的无差度阶数是()答案:115.系统的传递函数为,则当从变化时,其相位角变化为()答案:-90°~-270°16.下图给出了某最小相位系统串联校正前后的对数幅频特性渐近曲线L0、L1。
校正后与校正前相比,时域性能()答案:%,17.下图所示的有源电网络,当C1=C2,R1>R2时,以ui为输入、uo为输出的作用是:()答案:相位超前18.反馈控制系统如图所示,求闭环传递函数()答案:19.闭环传递函数为的单位脉冲响应曲线在处的值为( )答案:20.某控制系统的单位阶跃响应为。