智能控制理论及应用 王耀南 孙炜 第6章 模糊神经网络新
- 格式:ppt
- 大小:4.11 MB
- 文档页数:29
智能控制理论及应用1 智能控制的兴起1.1 自动控制的发展本世纪40-50年代,以频率法为代表的单变量系统控制理论逐步发展起来,并成功的用在雷达及火力控制系统上,形成了“古典控制理论”。
60-70年代,数学家们在控制理论发展中占了主导地位,形成了以状态空间法为代表的“现代控制理论”。
他们引入了能控、能观、满秩等概念,使得控制理论建立在严密精确的数学模型之上。
70年代后,又出现了“大系统理论”。
1.2 智能控制的产生与发展随着研究的对象和系统越来越复杂,借助于数学模型描述和分析的传统控制理论已经很难解决复杂系统的控制问题。
智能控制是针对控制对象及其环境、目标和任务的不确定性和复杂性而产生和发展起来的。
从20世纪60年代起,计算机技术和人工智能技术迅速发展,为了提高控制系统的自学习能力,控制界学者开始将人工智能技术应用于控制系统。
20世界70年代初,傅京孙等学者从控制论角度总结了人工智能技术与自适应、自组织、自学习控制的关系,提出了智能控制是人工智能技术与控制理论的交叉的思想,并创立了人机交互式分级递阶智能控制的系统结构。
20世纪70年代中期,以模糊集合论为基础,智能控制在规则控制研究上取得了重要的发展。
20世纪80年代,专家系统技术的逐渐成熟及计算机技术的迅速发展,使得智能控制和决策的研究也取得了较大进展。
20世纪80年代中后期,人工神经网络的研究取得了重要的进展,并解决了回归网络的学习问题。
20世纪90年代以来,智能控制的研究非常活跃。
所谓的智能控制是指:一种控制方式如果它能够有效的克服被控对象和环境所具有的高度复杂性和不确定性,并且能够达到所期望的目标,则称这种控制方式为智能控制。
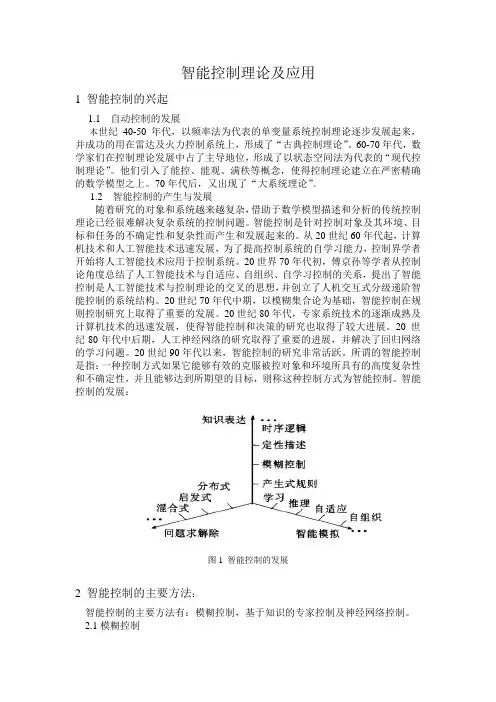
智能控制的发展:图1 智能控制的发展2 智能控制的主要方法:智能控制的主要方法有:模糊控制,基于知识的专家控制及神经网络控制。
2.1模糊控制模糊控制以模糊集合、模糊语言变量、模糊推理为其理论基础,以先验知识和专家经验作为控制规则。
1课题背景及意义汽车工业发展已有100多年的历史。
自20世纪80年代以来,智能控制理论与技术在交通运输项目中越来越多地被应用,在这一背景下,智能汽车的概念应运而生。
所谓智能汽车,就是在网络环境下用信息技术和智能控制技术武装的汽车。
智能汽车是一种高新技术密集的新型汽车,研究人员正从智能汽车的信息系统、控制系统、网络环境及智能结构等几个方面进行研究[1]。
智能汽车的设计和开发,将从根本上改变现有汽车的信息采集处理、数据交换、行车导航与定位、车辆控制的技术方案与体系结构。
自20世纪90年代以来,随着汽车市场竞争激烈程度的日益加剧和智能运输系统(ITS>研究的兴起,国际上对于智能汽车及其相关技术的研究成为热门,一批有实力、有远见卓识的汽车行业大公司、研究院校和高等院校也正在展开智能汽车的研究。
国内外业界和学术界形成了共识,即现代汽车行业的新一轮竞争的焦点将是涉及微电子技术、智能自动化技术、通信技术等新技术领域的智能汽车的研究与开发[1]。
21世纪的汽车概念将发生根本性的变化。
现在的“汽车”是带有一些电子控制的机械装置,将来的“汽车”将转变为带有一些辅助机械的机电一体化装置,汽车的主要部分不再仅仅是个机械装置,它正向消费类电子产品转移。
据HP公司统计,目前世界平均每辆汽车在电子方面的投资约为1200美元<不包括立体声音响、收音机和电话),而且正在以每年15%的速率增加。
同时,智能汽车在传统汽车上配备了远程信息处理器、传感器和接收器,通过无线网络获取前方交通状况信息,引导汽车加速或减速。
这样,汽车就能更为平稳地行驶,避免不断刹车、启动的动作,以降低油耗。
随着汽车电子控制技术的发展,中国的汽车工业将面临着巨大的发展机遇和挑战,开展智能汽车技术的研究与开发工作具有重要的意义[1]。
大学生智能汽车竞赛是以迅猛发展的汽车电子为背景,涵盖了智能控制、模式识别、传感技术、电子、计算机、机械、交通等多个学科交叉的科技创意性比赛。
支持向量机-模糊推理自学习控制器设计
袁小芳;王耀南;孙炜
【期刊名称】《控制理论与应用》
【年(卷),期】2006(23)1
【摘要】常规的模糊推理系统大多由专家经验建立模糊规则,自学习能力不强.提出了一种支持向量机-模糊推理系统,由支持向量机实现模糊推理系统的自学习,并设计了一种支持向量机-模糊推理自学习控制器.文章给出了自学习控制器的结构和学习算法,对比研究了变尺度梯度优化和混沌优化两种学习算法.针对非线性对象的仿真实验验证了该控制器的优良性能,控制效果比模糊逻辑控制器更好.
【总页数】6页(P1-6)
【作者】袁小芳;王耀南;孙炜
【作者单位】湖南大学,电气与信息工程学院,湖南,长沙,410082;湖南大学,电气与信息工程学院,湖南,长沙,410082;湖南大学,电气与信息工程学院,湖南,长沙,410082【正文语种】中文
【中图分类】TP18
【相关文献】
1.基于遗传算法的自学习模糊控制器的设计 [J], 王慧琴;孙衢;李人厚
2.永磁交流伺服系统参数自学习模糊控制器设计与实现 [J], 张剑;许镇琳
3.发酵过程自学习模糊神经元控制器的设计 [J], 王贵成;张敏;常静;徐心和;姜长洪
4.一类无静差自学习模糊控制器设计 [J], 杨启文;何衍;蒋静坪
5.自学习模糊逻辑推理网络及模糊控制器的构成 [J], 张新学;王桂增;大町真一郎;阿曾弘具
因版权原因,仅展示原文概要,查看原文内容请购买。

《智能控制理论及应用》教学大纲课程名称:智能控制理论及应用课程编号:0811010006课程学时:36学时课程学分:2适用专业:控制理论与控制工程课程性质:专业方向课先修课程:《高等数学》、《自动控制原理》、《现代控制理论》大纲执笔人:编写时间:2006年9月一、课程目的与要求本课程主要讲授模糊控制、神经网络控制和遗传算法控制等。
通过本课程的学习,可使学生熟悉智能控制的主要理论分支、数学基础、应用场合及发展趋势,掌握智能控制的理论基础及其在实际控制系统中的应用方法。
二、教学内容及学时安排(一)绪论:2学时主要介绍智能控制定义、智能控制的主要类型、智能控制的产生和发展,(二)模糊控制:10学时2.1模糊控制的数学基础2.2模糊语言变量与模糊语句2.3模糊推理2.4模糊控制器的工作原理2.5模糊控制仿真应用实例(三)神经网络控制:8学时3.1人工神经网络基础3.2 BP网络3.3径向基函数网络3.4 Hopfield网络3.5神经网络系统辨识3.6神经网络控制及应用(四)模糊神经网络控制:2学时4.1模糊神经网络基本思想4.2模糊神经网络结构4.3模糊神经网络控制原理4.4模糊神经网络控制应用(五)遗传算法:8学时5.1遗传算法的基本操作5.2遗传算法实现与改进5.3遗传算法在智能控制中应用(六)专家系统:2学时6.1专家系统基本思想6.2专家系统的应用(七)应用讨论:4学时主要探索智能控制方法在工程中应用三、教材及主要参考书无教材,主要参考书目《智能控制理论与技术》孙增圻编,清华大学出版社,2004.10《智能控制理论及应用》王耀南、孙炜编,机械工业大学出版社,2008 四、考核方式考核方式为平时成绩(30%)+期末试卷考试成绩(70%)。

智能控制理论及应用第1章绪论■《智能控制》在自动化课程体系中的位置《智能控制》是一门控制理论课程,研究如何运用人工智能的方法来构造控制系统和设计控制器。
与《自动控制原理》和《现代控制原理》一起构成了自动控制课程体系的理论基础。
■《智能控制》在控制理论中的位置《智能控制》是目前控制理论的最高级形式,代表了控制理论的发展趋势,能有效地处理复杂的控制问题.其相关技术可以推广应用于控制之外的领域:金融、管理、土木、设计等等。
■经典控制和现代控制理论的统称为传统控制,智能控制是人工智能与控制理论交叉的产物,是传统控制理论发展的高级阶段。
智能控制是针对系统的复杂性、非线性和不确定性而提出来的。
■传统控制和智能控制的主要区别:➢传统控制方法在处理复杂化和不确定性问题方面能力很低;智能控制在处理复杂性、不确定性方面能力较高。
智能控制系统的核心任务是控制具有复杂性和不确定性的系统,而控制的最有效途径就是采用仿人智能控制决策。
➢传统控制是基于被控对象精确模型的控制方式;智能控制的核心是基于知识进行智能决策,采用灵活机动的决策方式迫使控制朝着期望的目标逼近。
传统控制和智能控制的统一:智能控制擅长解决非线性、时变等复杂的控制问题,而传统控制适于解决线性、时不变等相对简单的控制问题。
智能控制的许多解决方案是在传统控制方案基础上的改进,因此,智能控制是对传统控制的扩充和发展,传统控制是智能控制的一个组成部分。
■智能控制与传统控制的特点。
传统控制:经典反馈控制和现代理论控制。
它们的主要特征是基于精确的系统数学模型的控制.适于解决线性、时不变等相对简单的控制问题。
智能控制:以上问题用智能的方法同样可以解决。
智能控制是对传统控制理论的发展,传统控制是智能控制的一个组成部分,在这个意义下,两者可以统一在智能控制的框架下.■智能控制应用对象的特点(1)不确定性的模型模型未知或知之甚少;模型的结构和参数可能在很大范围内变化。
(2)高度的非线性(3)复杂的任务要求■自动控制的发展过程■智能控制系统的结构一般有哪几部分组成,它们之间存在什么关系?答:智能控制系统的基本结构一般由三个部分组成:人工智能(AI):是一个知识处理系统,具有记忆、学习、信息处理、形式语言、启发式推理等功能。
智能控制理论及其应用[摘要] 本文回顾了智能控制理论的提出与发展过程,介绍了智能控制的特点,给出了智能控制理论的主要类型及其特点,列举了智能控制理论与技术的主要应用领域,最后总结了智能控制理论的发展趋势。
[关键词] 智能控制模糊控制神经网络专家控制[Abstract] This paper reviewed the development of intelligence control, and introduced its main methods and characteristics, and particularized their mostly application fields, and pointed out the prospects of intelligent control development trend and put forward the study direction.[Key Words] intelligent control fuzzy control net neural expert control0.引言随着工业和自动化技术的发展,控制理论的应用日趋广泛,所涉及的控制对象日益复杂化,对控制性能的要求也越来越高,控制对象或过程的复杂性主要体现在系统缺乏精确的数学模型、具有高维的判定空间、多种时间尺度和多种性能判据等,要求控制理论能够处理复杂的控制问题和提供更为有效的控制策略。
现代控制理论从理论上解决了系统的可观、可控、稳定性以及许多复杂系统的控制。
但实际中的许多复杂系统具有非线性、时变性、不确定性、多层次、多因素等热点,难以建立精确的数学模型,因此需要引入新的控制策略。
而随着人工智能领域的逐渐发展,智能控制在解决复杂被控对象的控制问题中越来越显示出其优越性,并在实际应用中显示出很强的生命力。
1.智能控制理论的提出与发展Norbert Wiener于20世纪40年代创立控制论以来,自动控制理论经历了经典控制理论和现代控制理论两个重要阶段,都不完善。