基于OpenCV的鼻尖特征点鼠标实时控制系统实现
- 格式:pdf
- 大小:1.86 MB
- 文档页数:6
在介绍OpenCV中的68个关键点之前,我们先来了解一下什么是OpenCV。
OpenCV是一种开源的计算机视觉和机器学习软件库,它提供了一系列用于图像处理、计算机视觉和模式识别的功能。
而68个关键点则是用于人脸检测和面部表情识别的重要组成部分。
接下来,我们将深入探讨这些关键点的介绍、作用以及对图像处理和机器学习的重要性。
1. 什么是68个关键点?在OpenCV中,68个关键点是指用于面部检测和特征点定位的一组指定位置。
这些关键点通常用于识别面部的轮廓、眼睛、鼻子、嘴巴等特征。
通过定位这些关键点,我们可以进行面部识别、面部跟踪、面部表情识别等一系列人脸相关的任务。
2. 68个关键点的作用68个关键点在图像处理和机器学习中具有非常重要的作用。
它们可以用于面部检测和识别,通过定位关键点,我们可以准确地识别出面部的各个特征,从而实现面部识别和跟踪。
它们还可用于面部表情识别,通过分析关键点的位置和变化,我们可以判断面部表情的类型,从而实现面部表情识别和情感分析。
它们还可以用于面部姿态估计和三维人脸重建等领域。
3. 对图像处理和机器学习的重要性在图像处理领域,68个关键点可以帮助我们更准确地定位和识别人脸特征,从而提高人脸检测和识别的准确性和鲁棒性。
在机器学习领域,通过分析关键点的位置和变化,我们可以训练模型进行面部表情识别和情感分析,从而在人机交互、智能家居、虚拟现实等领域有着广泛的应用。
4. 个人观点和理解从个人观点来看,68个关键点在人脸识别、面部表情识别和图像处理等方面具有非常重要的作用。
它们为我们提供了一种有效地方式来定位和识别人脸特征,从而实现更准确和可靠的人脸检测和识别。
在未来,我相信68个关键点会在人工智能、智能安防、智能医疗等领域发挥越来越重要的作用,并为人类社会带来更多的便利和福祉。
总结回顾:通过本文的介绍,我们深入了解了OpenCV中的68个关键点,包括其作用、对图像处理和机器学习的重要性,以及个人观点和理解。
pythonopencv3基于ORB的特征检测和BF暴力匹配knn匹配flann匹配Python OpenCV3中的ORB特征检测和BF暴力匹配以及FLANN匹配是计算机视觉中常用的技术,用于在图像中寻找相似的特征点并进行匹配。
下面将详细介绍这些技术以及如何使用它们。
一、ORB特征检测ORB(Oriented FAST and Rotated BRIEF)是一种用于检测图像特征的算法。
它结合了FAST特征检测和BRIEF特征描述子,并对其进行了改进,以便在实时性和准确性之间取得较好的平衡。
使用OpenCV中的ORB特征检测算法需要使用以下步骤:1. 创建ORB对象:使用cv2.ORB_create(方法创建ORB对象。
3. 绘制特征点:使用cv2.drawKeypoints(方法绘制特征点,传入原始图像、特征点和输出图像。
二、BF暴力匹配BF(Brute-Force)暴力匹配是一种简单但较慢的特征点匹配算法。
它通过计算两组特征点之间的欧氏距离,找到距离最近的特征点对。
使用BF暴力匹配算法需要使用以下步骤:1. 创建BFMatcher对象:使用cv2.BFMatcher_create(方法创建BFMatcher对象。
2. 匹配特征点:调用BFMatcher对象的match(方法,传入两组特征描述子,方法将返回最佳匹配的特征点对。
3. 绘制匹配结果:使用cv2.drawMatches(方法绘制匹配结果,传入原始图像和两组特征点。
三、FLANN匹配FLANN(Fast Approximate Nearest Neighbors)是一种快速近似最近邻算法,它可以在大型数据集上进行高效的最近邻。
在图像匹配中,它可以加速特征点匹配的过程。
使用FLANN匹配算法需要使用以下步骤:1. 创建FLANN匹配器:使用cv2.FlannBasedMatcher(方法创建FLANN匹配器对象。
2. 创建索引:调用BFMatcher对象的knnMatch(方法,传入两组特征描述子和最近邻数k,方法将返回最佳匹配的特征点对。
《基于OPENCV的计算机视觉技术研究》篇一一、引言计算机视觉技术已成为人工智能领域的重要组成部分,它通过模拟人类的视觉系统,实现对图像和视频的识别、分析和理解。
近年来,随着计算机技术的飞速发展,计算机视觉技术在各个领域得到了广泛应用。
而OPENCV作为一种开源的计算机视觉库,为计算机视觉技术的发展提供了强大的支持。
本文将基于OPENCV的计算机视觉技术进行研究,探讨其应用和未来发展。
二、OPENCV概述OPENCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,包含了大量的图像处理和计算机视觉算法。
它提供了丰富的API接口,方便用户进行二次开发和集成。
OPENCV支持多种操作系统和编程语言,广泛应用于图像处理、目标检测、人脸识别、三维重建等领域。
三、基于OPENCV的计算机视觉技术研究1. 图像处理图像处理是计算机视觉技术的基础,主要包括图像滤波、增强、分割、去噪等操作。
OPENCV提供了大量的图像处理算法,如高斯滤波、中值滤波、边缘检测等。
这些算法可以有效地提高图像的质量和清晰度,为后续的图像分析和识别提供支持。
2. 目标检测目标检测是计算机视觉技术的重要应用之一,主要针对图像中的特定目标进行识别和定位。
OPENCV中包含了多种目标检测算法,如HOG+SVM、Haar特征+Adaboost等。
这些算法可以有效地实现人脸、车辆、行人等目标的检测和跟踪。
3. 人脸识别人脸识别是计算机视觉技术在生物识别领域的重要应用之一。
OPENCV中的人脸识别算法包括特征提取和匹配两个步骤。
首先,通过提取人脸的特征信息(如特征点、面部形状等),然后利用算法对不同人脸的特征进行匹配和比对,从而实现人脸识别。
4. 三维重建三维重建是计算机视觉技术中的一项重要技术,可以通过对多个角度的图像进行采集和处理,实现三维场景的重建。
OPENCV中的三维重建算法包括立体匹配、深度估计等。
opencv中的68个关键点介绍1. 引言OpenCV是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉功能。
在OpenCV中,68个关键点是人脸关键点检测领域中非常重要的一个概念,它们用于标记和识别人脸上的重要特征点。
本文将详细介绍OpenCV中的68个关键点,包括其用途、检测方法和应用场景等。
2. 68个关键点的用途68个关键点用于描述和标记人脸上的重要特征点,包括眼睛、眉毛、鼻子、嘴巴等部位。
这些关键点可以用于人脸识别、人脸表情分析、人脸姿态估计等应用中。
通过检测和分析这些关键点,可以实现人脸的特征提取、人脸变形、人脸配准等功能。
3. 68个关键点的检测方法在OpenCV中,68个关键点的检测通常是通过使用人脸关键点检测算法实现的。
常用的人脸关键点检测算法包括基于特征的方法和基于深度学习的方法。
3.1 基于特征的方法基于特征的方法通过提取人脸的特征点来实现关键点的检测。
其中,常用的方法包括Haar特征、LBP特征和HOG特征等。
这些方法通过计算图像中的局部特征来检测人脸关键点,并具有较高的检测精度和实时性。
3.2 基于深度学习的方法基于深度学习的方法是近年来人脸关键点检测领域的热点研究方向。
这些方法通过训练深度神经网络来实现关键点的检测。
常用的深度学习模型包括卷积神经网络(CNN)、残差网络(ResNet)和人脸关键点检测网络(Face Alignment Network)等。
这些模型通过学习大量标注数据来实现人脸关键点的准确检测。
4. 68个关键点的应用场景68个关键点在计算机视觉和人机交互领域有广泛的应用场景,下面将介绍其中几个典型的应用场景。
4.1 人脸识别人脸识别是一种通过分析人脸图像进行身份验证和识别的技术。
68个关键点可以用于提取人脸的特征向量,通过比较不同人脸的特征向量来实现人脸的识别和匹配。
4.2 人脸表情分析人脸表情分析是一种通过分析人脸表情来判断人的情绪状态的技术。

《基于机器视觉的工件识别与定位系统的设计与实现》一、引言随着工业自动化和智能制造的快速发展,工件识别与定位技术在生产线上扮演着越来越重要的角色。
传统的人工识别与定位方式不仅效率低下,而且易受人为因素的影响。
因此,基于机器视觉的工件识别与定位系统应运而生,其通过计算机视觉技术实现对工件的快速、准确识别与定位,从而提高生产效率和质量。
本文将介绍一种基于机器视觉的工件识别与定位系统的设计与实现。
二、系统设计1. 硬件设计本系统硬件部分主要包括工业相机、光源、工控机等。
其中,工业相机负责捕捉工件图像,光源提供合适的照明条件,以保证图像质量,工控机则负责图像处理和算法运行。
硬件设备需具备高稳定性、高精度和高速度的特点,以满足生产线上的实时性要求。
2. 软件设计软件部分主要包括图像预处理、工件识别和工件定位三个模块。
图像预处理模块负责对原始图像进行去噪、增强等处理,以提高图像质量。
工件识别模块通过训练好的机器学习模型对预处理后的图像进行识别,提取出工件的特征信息。
工件定位模块则根据识别结果,确定工件在图像中的位置信息。
三、算法实现1. 图像预处理图像预处理是工件识别与定位的前提。
本系统采用去噪、二值化、边缘检测等算法对原始图像进行处理,以提高图像质量和特征提取的准确性。
其中,去噪算法用于消除图像中的噪声干扰,二值化算法将图像转化为黑白二值图像,便于后续的特征提取和识别。
2. 工件识别工件识别是本系统的核心部分。
本系统采用深度学习算法训练机器学习模型,实现对工件的快速、准确识别。
具体而言,我们使用卷积神经网络(CNN)对大量工件图像进行训练,提取出工件的特征信息,并建立特征库。
在识别过程中,系统将预处理后的图像与特征库中的特征信息进行比对,找出最匹配的工件类型。
3. 工件定位工件定位是在识别的基础上,确定工件在图像中的具体位置。
本系统采用模板匹配算法实现工件定位。
具体而言,我们首先在特征库中选取与待定位工件相似的模板图像,然后在预处理后的图像中搜索与模板图像相匹配的区域,从而确定工件的位置信息。
《基于OPENCV的运动目标检测与跟踪技术研究》篇一一、引言随着计算机视觉技术的不断发展,运动目标检测与跟踪技术在智能监控、智能交通、人机交互等领域得到了广泛应用。
OPENCV(Open Source Computer Vision Library)作为一种开源的计算机视觉库,为运动目标检测与跟踪提供了强大的技术支持。
本文旨在研究基于OPENCV的运动目标检测与跟踪技术,为相关领域的研究与应用提供参考。
二、OPENCV概述OPENCV是一个开源的计算机视觉和机器学习软件库,包含了大量计算机视觉领域的经典算法。
它具有跨平台、高效、灵活的特点,广泛应用于图像处理、视频分析、三维重建等领域。
在运动目标检测与跟踪方面,OPENCV提供了丰富的算法和工具,为相关研究提供了便利。
三、运动目标检测技术研究运动目标检测是计算机视觉领域的重要研究内容,其目的是从视频序列中提取出运动目标。
基于OPENCV的运动目标检测技术主要包括背景减除法、光流法、帧间差分法等。
1. 背景减除法背景减除法是一种常用的运动目标检测方法,其基本思想是将当前图像与背景图像进行差分,从而得到运动目标的轮廓。
在OPENCV中,可以使用背景减除器(BackgroundSubtractor)实现该方法。
通过设置合适的参数,可以有效地提取出运动目标。
2. 光流法光流法是一种基于光流场的运动目标检测方法。
它通过计算像素点的运动矢量来检测运动目标。
在OPENCV中,可以使用光流法(OpticalFlow)实现该功能。
光流法具有较高的准确性和鲁棒性,但计算量较大,适用于对实时性要求不高的场景。
3. 帧间差分法帧间差分法是一种简单的运动目标检测方法,其基本思想是计算相邻两帧图像的差异,从而得到运动目标的轮廓。
在OPENCV中,可以使用帧间差分法(InterFrameDifference)实现该功能。
该方法具有计算量小、实时性好的优点,但容易受到光照变化和噪声的影响。
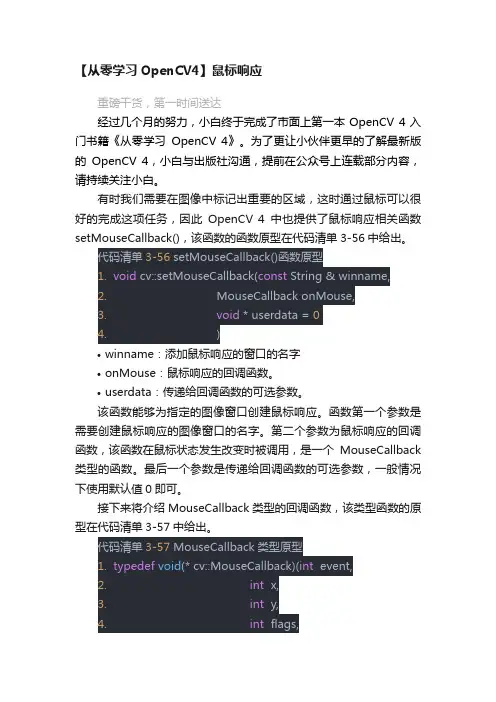
【从零学习OpenCV4】鼠标响应重磅干货,第一时间送达经过几个月的努力,小白终于完成了市面上第一本OpenCV 4入门书籍《从零学习OpenCV 4》。
为了更让小伙伴更早的了解最新版的OpenCV 4,小白与出版社沟通,提前在公众号上连载部分内容,请持续关注小白。
有时我们需要在图像中标记出重要的区域,这时通过鼠标可以很好的完成这项任务,因此OpenCV 4中也提供了鼠标响应相关函数setMouseCallback(),该函数的函数原型在代码清单3-56中给出。
代码清单3-56 setMouseCallback()函数原型1.void cv::setMouseCallback(const String & winname,2. MouseCallback onMouse,3.void * userdata = 04. )•winname:添加鼠标响应的窗口的名字•onMouse:鼠标响应的回调函数。
•userdata:传递给回调函数的可选参数。
该函数能够为指定的图像窗口创建鼠标响应。
函数第一个参数是需要创建鼠标响应的图像窗口的名字。
第二个参数为鼠标响应的回调函数,该函数在鼠标状态发生改变时被调用,是一个MouseCallback 类型的函数。
最后一个参数是传递给回调函数的可选参数,一般情况下使用默认值0即可。
接下来将介绍MouseCallback类型的回调函数,该类型函数的原型在代码清单3-57中给出。
代码清单3-57 MouseCallback类型原型1.typedef void(* cv::MouseCallback)(int event,2.int x,3.int y,4.int flags,5.void *userdata6. )•event:鼠标响应事件标志,参数为EVENT_*形式,具体可选参数及含义在表3-9给出。
•x:鼠标指针在图像坐标系中的x坐标•y:鼠标指针在图像坐标系中的y坐标•flags:鼠标响应标志,参数为EVENT_FLAG_*形式,具体可选参数及含义在表3-10给出。

毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
《基于KCF跟踪算法的目标轨迹记录系统的设计与实现》一、引言随着计算机视觉技术的快速发展,目标轨迹记录系统在众多领域中发挥着越来越重要的作用。
本文将介绍一种基于KCF (Kernelized Correlation Filters)跟踪算法的目标轨迹记录系统的设计与实现。
KCF算法因其高精度、高效率的跟踪性能,被广泛应用于目标跟踪任务中。
二、系统设计1. 系统架构设计本系统采用模块化设计,主要包括数据采集模块、预处理模块、KCF跟踪模块、轨迹记录模块和用户交互模块。
各模块之间通过接口进行数据交互,保证系统的稳定性和可扩展性。
2. 核心算法选择——KCF跟踪算法KCF(Kernelized Correlation Filters)算法是一种基于相关滤波器的跟踪算法,它通过训练得到一个分类器,用于在视频帧中准确地定位目标。
KCF算法具有计算效率高、实时性好、对光照、尺度变化等具有一定的鲁棒性,因此非常适合用于目标轨迹记录系统。
3. 数据预处理数据预处理模块负责对输入的视频数据进行预处理,包括去噪、图像增强等操作,以提高KCF算法的跟踪精度。
4. 轨迹记录与存储轨迹记录模块负责记录目标的轨迹信息,包括目标的位置、速度等信息。
这些信息将存储在数据库中,以便后续分析和处理。
三、系统实现1. 数据采集与预处理实现数据采集模块通过摄像头等设备获取视频数据。
预处理模块采用OpenCV等图像处理库对视频数据进行去噪、图像增强等操作,以提高KCF算法的跟踪精度。
2. KCF跟踪算法实现KCF跟踪算法的实现是本系统的核心部分。
我们采用Python 语言和OpenCV库实现KCF算法。
首先,初始化目标的位置和大小;然后,通过训练得到一个分类器;最后,在视频帧中应用该分类器进行目标跟踪。
3. 轨迹记录与存储实现轨迹记录模块将目标的轨迹信息存储在数据库中。
我们采用SQLite等轻量级数据库进行数据存储,以便于后续分析和处理。
《基于OpenCV的工业机器视觉软件开发》篇一一、引言随着人工智能与计算机视觉技术的快速发展,工业生产中的机器视觉系统正变得越来越重要。
OpenCV(开源计算机视觉库)以其强大的图像处理能力和广泛的兼容性,成为工业机器视觉软件开发的首选工具。
本文将详细探讨基于OpenCV的工业机器视觉软件开发的原理、技术及应用。
二、OpenCV技术概述OpenCV是一个开源的计算机视觉和机器学习软件库,包含大量用于图像处理和计算机视觉的算法。
它具有广泛的应用领域,包括人脸识别、目标检测、图像分割、运动分析等。
在工业生产中,OpenCV被广泛应用于工业检测、质量控制、自动化生产等方面。
三、基于OpenCV的工业机器视觉软件开发1. 开发流程基于OpenCV的工业机器视觉软件开发流程主要包括需求分析、系统设计、图像预处理、特征提取、目标检测与跟踪、结果输出等步骤。
其中,需求分析和系统设计是软件开发的基础,图像预处理和特征提取是关键技术,目标检测与跟踪是实现自动化生产的核心,结果输出则是整个系统的最终目标。
2. 关键技术(1)图像预处理:包括图像滤波、二值化、边缘检测等操作,用于提高图像质量和提取有用信息。
(2)特征提取:通过SIFT、SURF等算法提取图像中的特征点,为后续的目标检测与跟踪提供依据。
(3)目标检测与跟踪:利用OpenCV中的对象检测算法(如HOG、SVM等)实现目标的实时检测与跟踪。
(4)结果输出:将检测与跟踪的结果以直观的方式呈现给用户,如通过LED灯、显示屏等方式进行报警或提示。
四、应用案例以某自动化生产线上的工件检测为例,介绍基于OpenCV的工业机器视觉软件的应用。
该系统通过摄像头实时捕捉工件图像,利用OpenCV进行图像预处理和特征提取,然后通过目标检测算法实现工件的实时检测与定位。
当工件存在缺陷或位置不正确时,系统将自动报警并提示操作人员进行处理。
通过该系统,生产线的检测效率得到了显著提高,同时降低了人工成本和误检率。
opencv基于光流的物体跟踪方法基于光流的物体跟踪是一种常见的计算机视觉任务,该方法利用图像中像素的运动信息来跟踪物体。
光流是指由相邻帧之间的像素运动引起的现象,通过计算像素在两个连续帧之间的位移向量来估计运动。
在OpenCV中,有多种基于光流的物体跟踪方法可供选择,其中最常用的是Lucas-Kanade光流法和稠密光流法。
1. Lucas-Kanade光流法:Lucas-Kanade光流法是一种基于特征点匹配的光流估计方法,它假设相邻帧之间的像素移动是局部稳定的,并为每个特征点计算其在下一帧中的位置。
Lucas-Kanade光流法的步骤如下:-首先,选择一组特征点作为跟踪点,并检测这些特征点在当前帧中的位置。
-然后,在下一帧中寻找每个特征点的对应位置,利用局部区域内的像素强度差异来匹配特征点。
-最后,通过最小二乘法估计特征点的位移向量,并更新特征点在下一帧中的位置。
Lucas-Kanade光流法在OpenCV中的实现非常简单,可以使用calcOpticalFlowPyrLK函数实现。
2.稠密光流法:稠密光流法是一种直接估计整个图像中每个像素的运动向量的方法,它不需要提前选择特征点,而是对整个图像进行处理。
稠密光流法的步骤如下:- 首先,计算两个连续帧之间的图像梯度,可以使用calcOpticalFlowFarneback函数实现。
-然后,通过计算每个像素的速度向量来估计光流。
-最后,可以根据每个像素的运动向量来跟踪物体的位移。
稠密光流法在OpenCV中的实现也比较简单,可以使用calcOpticalFlowFarneback函数实现。
除了Lucas-Kanade光流法和稠密光流法,OpenCV还提供了其他一些基于光流的物体跟踪方法,如金字塔LK光流法(Pyramidal Lucas-Kanade光流法)、高级背景建模等。
总结起来,基于光流的物体跟踪是一种常见的计算机视觉任务,在OpenCV中有多种方法可供选择。
《基于机器视觉的工件识别与定位系统的设计与实现》一、引言随着科技的进步和工业自动化程度的提高,机器视觉在制造业中的应用越来越广泛。
基于机器视觉的工件识别与定位系统作为自动化生产线上的重要一环,能够快速、准确地识别和定位工件,从而提高了生产效率和产品质量。
本文将介绍一种基于机器视觉的工件识别与定位系统的设计与实现。
二、系统需求分析(一)系统目标本系统旨在实现工件的快速、准确识别与定位,以满足自动化生产线的高效、精准作业需求。
(二)功能需求1. 工件识别:系统能够识别不同类型的工件,包括形状、尺寸、颜色等特征。
2. 工件定位:系统能够准确判断工件的位置,为后续的抓取、装配等操作提供精确的坐标信息。
3. 实时性:系统应具备较高的处理速度,以满足实时生产线的作业需求。
4. 稳定性:系统应具备较高的稳定性,以适应不同环境下的工件识别与定位。
三、系统设计(一)硬件设计1. 工业相机:负责捕捉工件的图像信息。
2. 光源:提供合适的光源,以保证图像的清晰度和对比度。
3. 工业计算机:负责图像处理、算法运算等任务。
4. 传输设备:将工业计算机与自动化生产线连接起来,实现数据的实时传输。
(二)软件设计1. 图像预处理:对捕捉到的图像进行去噪、二值化等处理,以便后续的识别与定位。
2. 特征提取:提取工件的形状、尺寸、颜色等特征,为识别与定位提供依据。
3. 算法设计:采用机器视觉算法,如模板匹配、深度学习等,实现工件的快速、准确识别与定位。
4. 界面设计:设计友好的人机交互界面,方便操作人员使用。
四、算法实现与优化(一)算法实现本系统采用基于机器视觉的算法实现工件的识别与定位。
具体包括图像预处理、特征提取、模板匹配等步骤。
其中,深度学习算法在特征提取和识别过程中发挥了重要作用。
通过训练大量的样本数据,系统能够自动学习工件的特征,提高识别的准确性和速度。
(二)算法优化为了提高系统的实时性和稳定性,我们采取了以下优化措施:1. 优化图像预处理算法,减少处理时间。
基于OpenCV3的眼球鼠标研究董劭杰;陈哲【摘要】随着计算机处理能力的提升和计算机视觉算法的发展更新,越来越多的人机交互方式也变得可行.以人的眼部动作为判断标准的眼球鼠标便属于其中一种新颖的交互方式,根据实验数据和计算机视觉理论对眼球鼠标进行研究.【期刊名称】《现代计算机(专业版)》【年(卷),期】2018(000)025【总页数】4页(P56-58,63)【关键词】人脸识别;人眼识别;瞳孔定位;人机交互【作者】董劭杰;陈哲【作者单位】南京工程学院,南京 211167;南京工程学院,南京 211167【正文语种】中文1 研究背景随着图像处理技术的进展和计算机处理能力的提高,以家用计算机作为硬件载体已经完全可以运行一些计算机视觉库,并且得到相对准确的结果。
利用这一结果,一部分残障人士通过增量的软件更新和家用摄像头就可以方便地控制使用家用电脑,而不必做硬件层面的大改动。
另外,人的眼部动作蕴含了非常多的信息量,同时双目的目光聚焦处也代表了当前用户的注意力集中点,利用眼球的这一属性,可以适量减少操作过程中的误触和不当操作,有助于提高工作效率。
最后,对新的人机交互方式的探索也许能够带来更好的用户体验,帮助人们更加便捷地使用计算机提高生产力。
2 人眼识别的理论依据2.1 Haar-like特征在对人眼进行定位的过程中我们使用了OpenCV3中的Haar分类器。
Haar-like 特征最早是由Papageor⁃giou等应用于人脸表示,Viola和Jones在此基础上,使用3种类型4种形式的特征。
Haar分类器的工作原理如下:分布于目标区域中的矩形框通过强化的特征来反映各个位置的灰度变化,并且最终由这些变化情况来对目标图像进行分类识别。
图1最初的特征库包含3种类型的特征,如上图1所示。
图像中白色区域的像素灰度值与减去黑色区域像素灰度值之和,所得到的数值就是所覆盖区域的特征值[1]。
Haar特征值反映了图像的灰度变化情况。