经典雷达回波信号检测
- 格式:pdf
- 大小:2.56 MB
- 文档页数:26
雷达波测试方案1. 引言雷达系统是一种利用射频信号和电磁波进行测量和探测的技术。
雷达波测试是为了验证雷达系统的性能和功能是否符合要求而进行的一系列测试。
本文档旨在介绍雷达波测试的基本原理和测试方案,并提供一些常用的测试方法和工具。
2. 雷达波测试原理雷达系统通过发送射频信号并接收击中目标后的回波信号来测量距离、速度和方向等目标信息。
雷达波测试主要涉及以下几个方面:•波形检测:对发送和接收的波形进行检测,确保信号质量和完整性;•距离测量:通过计算发送信号和接收回波信号之间的时间差来测量目标的距离;•多目标分辨:能够识别和区分多个目标的特征;•目标检测和跟踪:及时地发现和追踪目标的位置和运动轨迹。
3. 测试方案3.1 波形检测测试波形检测测试是为了确认发送和接收的波形是否完整和正确。
主要步骤如下:1.使用示波器将发送和接收的波形信号分别连接到示波器的输入端口;2.设置示波器的参数,包括垂直和水平尺度、触发模式和触发级别等;3.发送一个测试信号并观察示波器上的波形图;4.判断波形是否正常,并根据需要进行调整。
3.2 距离测量测试距离测量测试是为了验证雷达系统测量目标距离的准确性。
主要步骤如下:1.在合适的测试环境中放置一个标准目标,并确保目标距离雷达系统的距离已知;2.使用雷达系统发送信号,并记录发送和接收的时间戳;3.使用距离公式计算目标的距离,并与已知距离进行比较;4.判断测量误差是否在可接受范围内,并根据需要进行调整。
3.3 多目标分辨测试多目标分辨测试是为了验证雷达系统是否能够同时识别和分辨多个目标。
主要步骤如下:1.在合适的测试环境中放置多个目标,并设置它们的位置和速度;2.使用雷达系统进行测量,并记录测量结果;3.判断系统是否正确地识别和分辨出各个目标,并根据需要进行调整。
3.4 目标检测和跟踪测试目标检测和跟踪测试是为了验证雷达系统能否及时发现并追踪目标的位置和运动轨迹。
主要步骤如下:1.在合适的测试环境中放置一个运动的目标,并设置它的初始位置和速度;2.使用雷达系统进行目标检测和跟踪;3.观察系统是否能够及时地发现目标并追踪其运动轨迹;4.根据需要进行调整。

多普勒天气雷达回波数据质量检测及控制方法彭涛;刘娟;郑伟;刘兴忠;纪奎秀【摘要】本文提出了一种基于天气雷达回波强度和速度数据的质量检测方法。
通过采集天气雷达按统一的参数进行标定后的晴空标准地物回波强度作为模版,与实时采集的回波强度进行比较和误差分析,以及通过移相来自动检测速度数据理论值和实测值的误差大小,对回波强度数据和速度数据质量进行检测和校正,以此来实现对天气雷达回波数据的质量控制。
%This paper proposes a quality inspection method based on echo intensity and speed data of Doppler weather radar. The real-time echo intensity data is compared with a stencil that is collected on clear day from calibrated radar with uniform parameter standard. And the comparative errors are analyzed on the measured and theoretical value of the speed data through phaseshift. Based on the above comparisons, the echo intensity and speed data are detected and corrected to achieve quality control for echo data of weather radar【期刊名称】《气象水文海洋仪器》【年(卷),期】2012(029)001【总页数】5页(P15-19)【关键词】大气探测;天气雷达回波数据;质量控制【作者】彭涛;刘娟;郑伟;刘兴忠;纪奎秀【作者单位】电子科技大学通信与信息工程学院,成都610054/四川省大气探测技术中心,成都610072;四川省大气探测技术中心,成都610072;四川省大气探测技术中心,成都610072;四川省大气探测技术中心,成都610072;四川省大气探测技术中心,成都610072【正文语种】中文【中图分类】TN959.40 引言天气雷达作为目前探测强对流天气的主要手段,在气象保障上起着非常重要的作用。
堕查鎏三些查兰三兰塑圭兰竺鲨三日摘要现代战争是一场高科技条件下的局部战争,其中精确制导武器占据着越来越重要的地位。
两伊战争后,各国在毫米波雷达导引头领域的竞争更为激烈,我国也在努力研究毫米波雷达主动寻的导引头。
信号处理器是毫米波导引头中重要的组成部分。
随着信号处理器性能的提高,精确制导导引头对成像、检测、识别的要求也是不断提高。
本文从理论结合实际的角度出发,从以下几个方面详细的对3mm波雷达导引头信号处理器系统及工作过程进行了分析。
3ram波雷达导引头的载波频率为94GHz,其发射波形为相参脉冲串(PD)信号结合步进频率(PSF)信号的双波形。
目标在搜索和跟踪阶段采用PD信号,成像和识别阶段采用PSF信号。
PD信号主要检测动目标的速度,PSF信号则可以测量目标的距离,速度和角度信息。
信号处理器系统主要完成对回波信号采样数据的处理。
硬件系统的性能直接决定了信号处理的速度和能力。
本信号处理器硬件系统由AD公司生产的ADSP21060构成,系统的并行运算能力可达480MFLOPS。
信号处理需要实现的功能主要包括:读取采样数据,幅相一致性补偿,速度补偿,谱分析(高分辨成像),目标检测,目标信息提取,系统的功能管理,和主机通信完成初始化信息装订及数据的回显、记录。
高分辨雷达下的杂波统计特性不同于常规雷达,高分辨雷达的目标检测相当于常规雷达下的多目标检测。
在高分辨雷达一维距离像中,目标成为具有多散射中心的面目标。
本文采用基于多散射中心的CFAR处理联合检测算法,将恒虚警检测、目标长度粗识别和目标运动相关原理结合起来,联合完成目标检测。
关键词3mm波雷达;PD、PSF信号;信号处理;目标检测堕查鎏三些查兰三主要圭耋堡兰三Abstractmemodemwarisalocalbattleinhigh—tech,andtheprecise-guidedweaponplayamoreandmoreimportantrole。
![激光雷达的回波信号检测方法、装置及存储介质[发明专利]](https://uimg.taocdn.com/9e696b3691c69ec3d5bbfd0a79563c1ec4dad759.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202110119842.9(22)申请日 2021.01.28(71)申请人 锐驰智光(北京)科技有限公司地址 100081 北京市海淀区中关村南大街乙12号天作国际A座2608(72)发明人 段奇甫 (51)Int.Cl.G01S 17/02(2020.01)G01S 17/10(2020.01)G01S 7/41(2006.01)(54)发明名称激光雷达的回波信号检测方法、装置及存储介质(57)摘要本发明公开一种激光雷达的回波信号检测方法、装置及存储介质。
根据本发明的一实施例的激光雷达的回波信号检测方法包括:接收回波信号,其中,所述回波信号是模拟信号形态;将从第一时间起经过预设时间时的回波信号的强度作为第一强度,其中,所述第一时间是回波信号的强度开始大于阈值的时间;所述预设时间的长度是接收回波信号之前已经设定的值,且小于从激光雷达发出的激光的脉冲宽度;将所述第一时间或与所述第一时间相关的时间发送给激光雷达外部或内部的处理器,与所述第一时间相关的时间是能够利用检测过程中已知的参数通过计算得到第一时间的时间;将第一强度发送给激光雷达外部或内部的处理器。
权利要求书3页 说明书9页 附图7页CN 112596062 A 2021.04.02C N 112596062A1.一种激光雷达的回波信号检测方法,其特征在于,包括:接收回波信号,其中,所述回波信号是模拟信号形态;将从第一时间起经过预设时间时的回波信号的强度作为第一强度,其中,所述第一时间是回波信号的强度开始大于阈值的时间,所述预设时间的长度是接收回波信号之前已经设定的值,且小于从激光雷达发出的激光的脉冲宽度;将所述第一时间或与所述第一时间相关的时间发送给激光雷达外部或内部的处理器,与所述第一时间相关的时间是能够利用检测过程中已知的参数通过计算得到第一时间的时间;将第一强度发送给激光雷达外部或内部的处理器。
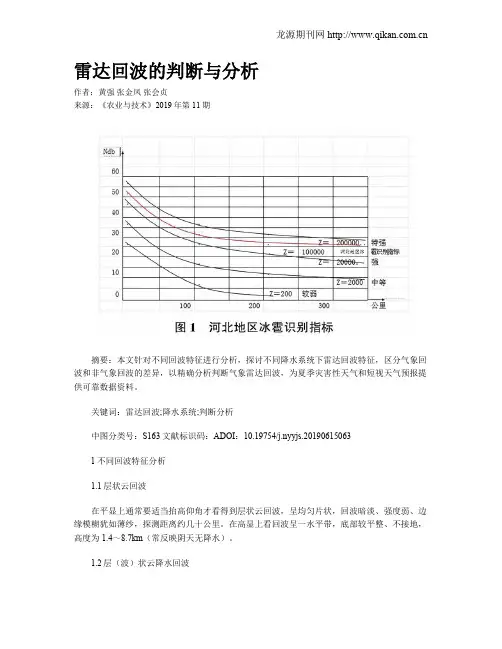
雷达回波的判断与分析作者:黄强张金凤张会贞来源:《农业与技术》2019年第11期摘要:本文针对不同回波特征进行分析,探讨不同降水系统下雷达回波特征,区分气象回波和非气象回波的差异,以精确分析判断气象雷达回波,为夏季灾害性天气和短视天气预报提供可靠数据资料。
关键词:雷达回波;降水系统;判断分析中图分类号:S163文献标识码:ADOI:10.19754/j.nyyjs.201906150631不同回波特征分析1.1层状云回波在平显上通常要适当抬高仰角才看得到层状云回波,呈均匀片状,回波暗淡、强度弱、边缘模糊犹如薄纱,探测距离约几十公里。
在高显上看回波呈一水平带,底部较平整、不接地,高度为1.4~8.7km(常反映阴天无降水)。
1.2层(波)状云降水回波在平显上,层(波)状云降水回波呈均匀片状,强度弱到中等,范围大,内部没有明显块体结构,边缘发毛,破碎模糊。
在高显上回波顶部平坦,且较均匀常看到0℃层300~1000m 的亮带,高度为3.6~8km(常反映大范围稳定性持续降水)。
1.3对流云回波在平显上回波呈小块状,有时零散孤立,有时排列成带状和不规则形状。
高显上常呈柱状、针状,底部不接地,强度为中等,高度为2.2~4.9km(为无降水)。
1.4阵雨回波在平显上回波呈孤立分散的小块单体或回波群,结构较松,边缘不清晰,单体水平尺度在10km以下,强度中等。
高显上回波呈针状顶部发毛,结构松散,回波高度在7~8km以下,回波底部接地(常反映短阵雨)。
1.5雷雨回波在平显上回波块体结识、肥大、紧密、轮廓清晰、边缘多折,单体水平尺度在10km以上,强度特强,很明亮。
在高显上呈柱状,低的仅5~6km,高的可达17~18km(常反映短暂雷雨)。
1.6雹云回波在平显上块体较大,结构紧密,发展急剧、多棱角、突起或小切口,移动迅速,强度特强,回波单块体范围小于10km。
在高显上强度最大值常出现在高于0℃等温线2~3km以上,云顶很高常在12~13km以上.通常呈针状接地的是阵雨回波,不接地的是对流云回波,平显上看单块体回波范围>10km、高显呈柱状,此回波可判定为雷雨回波。
垂直大气湍流影响下的天气雷达回波信号优化检测方法
郝孝智;付亚平;李芳;李延辉
【期刊名称】《测试技术学报》
【年(卷),期】2024(38)1
【摘要】垂直大气湍流导致回波信号在大气中扩散,使回波信号质量较差,极易被噪声所淹没,因此,提出垂直大气湍流影响下的天气雷达回波信号优化检测方法。
通过分析垂直大气湍流对天气雷达回波信号传输特性的影响,匹配滤波优化算法,改善垂直大气湍流影响导致质量下降的回波信号,利用模糊逻辑方法提取回波特征参数并构建对应隶属函数,设定阈值,获取天气雷达回波信号检测结果。
实验结果表明:该方法可有效检测不同仰角的天气雷达回波信号,回波信号波形均匀且波动幅度小,检测效果较好。
【总页数】6页(P60-65)
【作者】郝孝智;付亚平;李芳;李延辉
【作者单位】山西省大气探测技术保障中心;山西省气象灾害防御中心
【正文语种】中文
【中图分类】P412.25
【相关文献】
1.SWT声雷达探测系统对大气边界层声回波信号的变换与检测
2.CINRAD/SC新一代天气雷达回波地物检测与校正方法探讨
3.多普勒天气雷达回波数据质量检测
及控制方法4.X波段天气雷达回波强度信号标定方法5.常规天气雷达涨落回波中湍流速度的伪彩色PPI显示
因版权原因,仅展示原文概要,查看原文内容请购买。
激光雷达回波信号及处理方法分析摘要:本文研究的主要内容是用数字信号处理的方法来处理和分析用于大气探测的激光雷达的信号。
激光雷达的回波信号有很多种,例如:大气扰动噪声、电噪声以及背景噪声等,本文就是通过对这些大气探测的激光信号进行分析研究,并提出了一定的降噪方案,用来在一定程度上抑制部分噪声。
利用距离校正的方法来获得探测距离。
消除物理噪声采用的是mti的方法。
设计合适的滤波器,选择适当的截止频率,从而去除接收系统的各器件导致的高频的电噪声。
关键词:激光雷达;回波信号;处理中图分类号:tn958.98 文献标识码:a 文章编号:1674-7712 (2013) 08-0000-01随着雷达技术的不断提升,用于提供气象服务的雷达激光系统需要在可靠性、灵活性以及稳定性等方面做大幅度的提升。
为了满足气象服务的需求,激光雷达系统的时效性、精确性以及监测范围等都需要提出更严格的规范和要求。
因此,需要根据测风激光雷达的工作原理和工作特征,并且结合气象服务对于激光雷达系统的需求,比拟多普勒微波天气雷达系统的运行模式,对比传统激光雷达的测量手段,进一步制定用于气象服务的测风雷达系统的运行规范。
一、回波信号测风激光雷达系统包括四部分:发射激光部分、接受信号部分、采集处理信号部分。
信号由接受系统接受,再经过信号处理系统进行控制处理,最后转变为我们需要的确切的风场信息。
多普勒激光雷达系统接收到的是成指数衰减的回波信号。
距离越大,相应的噪声越大,接收到的信号能量越小[1]。
二、噪声(一)背景噪声激光雷达系统中由激光导致的噪声以及自然噪声都属于背景噪声。
自然噪声大部分是由月光、太阳光等造成的噪声。
当激光雷达系统工作在白天时,地面以及天空散射太阳光所导致的噪声是其主要作用的背景噪声。
在天空晴朗的情况下,由太阳光辐射所导致的散射分配到单位面积,相应的单位波长的功率密度的峰值(可见光区域)高达10-5wcm-2nm-1s-1,由大气中的二氧化碳以及水蒸气等吸收红外辐射所导致的很多凹陷大部分出现在0.7um以后的波长区域,在小于0.3um的区域内急剧下降主要是由于紫外辐射被地表上空的臭氧层大量吸收所导致的。
第1章雷达概论Merrill I. Skolnik1.1 雷达描述雷达的基本概念相对简单,但在许多场合下它的实现并不容易。
它以辐射电磁能量并检测反射体(目标)反射的回波的方式工作。
回波信号的特性提供有关目标的信息。
通过测量辐射能量传播到目标并返回的时间可得到目标的距离。
目标的方位通过方向性天线(具有窄波束的天线)测量回波信号的到达角来确定。
如果是动目标,雷达能推导出目标的轨迹或航迹,并能预测它未来的位置。
动目标的多普勒效应使接收的回波信号产生频移,因而即使固定回波信号幅度比动目标回波信号幅度大多个数量级时,雷达也可根据频移将希望检测的动目标(如飞机)和不希望的固定目标(如地杂波和海杂波)区分开。
当雷达具有足够高的分辨力时,它能识别目标尺寸和形状的某些特性。
雷达可在距离上、角度上或这两方面都获得分辨力。
距离分辨力要求雷达具有大的带宽,角度分辨力要求大的电尺寸雷达天线。
在横向尺度上,雷达获得的分辨力通常不如其在距离上获得的分辨力高。
但是当目标的各个部分与雷达间存在相对运动时,可运用多普勒频率固有的分辨力来分辨目标的横向尺寸。
虽然人们通常认为SAR是通过在存储器中存储接收到的信号,从而产生大的“合成”天线,但是用于成像(如地形成像)的合成孔径雷达在横向尺度上获得的分辨力仍可解释为,是由于利用了多普勒频率分辨力的结果。
这两种观点(多普勒分辨力和合成天线)是等效的。
展望用于目标成像的ISAR所能得到的横向分辨力的途径,理所当然应该是多普勒频率分辨力。
雷达是一种有源装置,它有自己的发射机而不像大多数光学和红外传感器那样依赖于外界的辐射。
在任何气象条件下,雷达都能探测或远或近的小目标,并精确测量它们的距离,这是雷达和其他传感器相比具有的主要优势。
雷达原理已在几兆赫兹(高频或电磁频谱的高频端)到远在光谱区外(激光雷达)的频率范围内得到应用。
这范围内的频率比高达109:1。
在如此宽的频率范围内,为实现雷达功能而应用的具体技术差别巨大,但是基本原理是相同的。
专业综合课程设计实验内容:雷达回波的信号检测某雷达发射信号为普通单载频信号,脉冲宽度PW (1~100us 自定),重复周期PRI (自定,不出现距离模糊),采样频率自定。
天线增益G (20~30dB 自定),天线有效接收面积r A (0.5~52m 自定),发射峰值功率t P (100KW ~1MW 自定),接收机采用检波非相参体制,带宽w B 较宽,带内噪声近似于白噪声,临界灵敏度min S 自定,系统损耗10dB 左右。
波束内有2~3个目标,距离自定,散射面积自定(飞机0.1~102m ,船舶100~100002m ),假设目标散射面积脉内不起伏,脉间起伏特性自定。
(1)利用雷达方程,进行雷达回波信号的仿真。
(2)在目标距离处,对有无信号条件下的概率密度函数进行估计(3)若脉冲内只有一个采样点,采用最小错误率贝叶斯判决方法进行目标检测,统计虚警率和漏警率。
(4)要求虚警率不大于10-5,试计算判决阈值并进行目标检测,统计虚警率和漏警率。
1.雷达系统仿真模型雷达系统仿真中,最重要的工作就是建立雷达系统的数学模型。
现代雷达不仅是多功能系统,而且也是一个高分辨力系统。
因而现代雷达系统的建模将是一个比较复杂和困难的过程,但给出一个一般性的模型还是可以的。
下面给出雷达系统仿真模型的总体框图。
雷达(Radar)全称是无线电探测与测距,它的基本原理其实很简单,就是通过定向发射电磁波照射到目标上,通过接收反射回来的电磁波测定目标位置。
电磁波是直线传播的,电磁波的传播速度c ,雷达定向发射电磁波到达目标后反射回来,接收机接收到该电磁波,这一过程所用时间为t ,目标的距离2ctd。
这是雷达基本测距原理。
又因为雷达电磁波是定向发射的,目标的方位也就可以确定了,有了方位和距离,我们就可以实现目标的定位。
雷达用途众多,雷达的用途不同体现在雷达战术性能参数的不同,进而决定了雷达的技术性能参数(包括辐射源特征参数)不同,反之,如果知道了雷达的辐射源特征参数,我们也可以通过某种规则和算法分析判断出雷达战术性能参数、进而推断出该雷达的用途。
雷达信号检测流程全文共四篇示例,供读者参考第一篇示例:雷达信号检测是一项重要的技术,用于检测和跟踪目标物体的位置和运动。
它在军事、安全、气象等领域都有广泛的应用。
雷达信号检测流程是指整个雷达系统中的信号检测部分的工作过程,其核心是信号处理和目标检测。
雷达信号检测流程的第一步是接收雷达发射的信号。
雷达发射器将电磁波通过天线发射出去,这些电磁波会与目标物体相互作用,一部分电磁波会被目标物体反射返回,被接收天线接收。
接收天线将接收到的电磁波信号转换成电信号,送入雷达接收机。
接收机的作用是放大和滤波接收到的信号,使之能够被后续的处理部分处理。
在放大和滤波的过程中,会去除干扰信号和杂波,只保留目标信号。
接收机将处理好的信号送入雷达信号处理部分。
雷达信号处理是整个雷达信号检测流程的核心部分,其主要任务是从接收到的信号中提取出目标的信息。
雷达信号处理包括目标检测、信号分析、信号处理和数据处理等步骤。
目标检测是指通过对接收到的信号进行分析,确定是否存在目标物体。
在雷达信号处理中,经常采用自适应滤波器、相关器及其它处理方法来提高目标检测性能。
信号分析是指对信号进行时域分析和频域分析,以分析目标的运动特性和形状特征。
信号处理是指对信号进行滤波、匹配滤波、降噪等处理,以提取目标的特征和参数。
数据处理是指对处理后的信号进行整合和分析,得出目标的位置、速度和轨迹等信息。
雷达信号检测流程的最后一步是目标跟踪。
目标跟踪是指通过对雷达目标信号的监测和分析,实时跟踪目标的位置和运动情况。
目标跟踪在雷达系统中具有重要意义,可以在一定程度上保证雷达系统的准确性和可靠性。
目标跟踪是通过对目标信号的特征提取、目标运动预测和目标轨迹跟踪等步骤来实现的。
雷达信号检测流程是一个复杂的系统工程,在实际应用中需要对雷达系统进行综合设计和优化。
通过不断地改进和提升雷达信号检测流程,可以提高雷达系统的性能和可靠性,更好地满足各种应用需求。
希望通过本文的介绍,读者能够对雷达信号检测流程有更深入的了解,为相关领域的研究和应用提供参考。
雷达波测试方案1. 简介雷达是一种常用的远程感知设备,它通过发射电磁波并接收其反射信号来探测和测量目标的位置、速度以及其他相关信息。
为了确保雷达设备的性能和准确性,必须进行雷达波测试。
本文档将介绍一个标准的雷达波测试方案。
2. 测试设备和工具进行雷达波测试所需的主要设备和工具如下:•雷达设备:用于发射和接收雷达波的设备。
•回波信号发生器:用于产生已知频率、幅度和相位的信号,模拟雷达的回波信号。
•示波器:用于观测和分析雷达波的波形。
•频谱分析仪:用于测量和分析雷达波的频谱特性。
•计算机:用于控制和记录测试数据。
•测试文档和表格:用于记录测试过程和结果。
3. 测试流程雷达波测试的一般流程如下:1.准备测试设备和工具。
2.连接回波信号发生器和示波器到雷达设备。
3.设置回波信号发生器,以产生各种测试用的回波信号。
4.使用示波器观测并记录雷达设备接收到的回波信号的波形特征。
5.使用频谱分析仪分析并记录雷达设备的回波信号的频谱特性。
6.根据测试需求,对雷达设备进行不同参数(如功率、频率、距离等)的测试。
7.分析测试结果,并根据需要对雷达设备的性能进行调整和改进。
8.记录测试过程和结果,以备后续参考。
4. 注意事项在进行雷达波测试时,需要特别注意以下事项:•安全性:确保测试人员和设备的安全,避免对周围环境和人员造成危险。
•仪器校准:在测试之前,对所有测试设备进行校准,以保证测试结果的精确性和可靠性。
•测试环境:选择合适的测试环境,以减少外界干扰对测试结果的影响。
•参数设置:根据测试需求,正确设置回波信号发生器和雷达设备的参数,确保测试的全面性和准确性。
•数据记录:详细记录测试过程和结果,保留相关的数据和文档,以备后续分析和参考。
5. 总结雷达波测试是评估雷达设备性能和准确性的重要手段。
通过使用合适的测试设备和工具,并按照标准的测试流程进行测试,可以获得准确、可靠的测试结果,为雷达设备的调整和改进提供参考依据。