优化设计VC6.0二次插值法
- 格式:docx
- 大小:159.12 KB
- 文档页数:4
二次拉格朗日插值公式二次拉格朗日插值公式是一种常用的插值方法,用于通过已知数据点来估计未知数据点的值。
它在数学和工程领域具有广泛的应用,如信号处理、图像处理、数据拟合等。
本文将对二次拉格朗日插值公式进行详细介绍,并探讨其原理和应用。
我们来了解一下二次拉格朗日插值公式的基本概念。
在一维插值问题中,假设我们已知三个数据点(x0, y0),(x1, y1),(x2, y2),其中x0 < x1 < x2,我们希望通过这三个数据点来估计给定的未知数据点x的值y。
二次拉格朗日插值公式可以通过以下公式计算出估计值y:y = ((x - x1)(x - x2)y0) / ((x0 - x1)(x0 - x2)) + ((x - x0)(x - x2)y1) / ((x1 - x0)(x1 - x2)) + ((x - x0)(x - x1)y2) / ((x2 - x0)(x2 - x1))二次拉格朗日插值公式的优点是简单易用,计算量较小。
但同时也存在一些限制,如对于非等距数据点的插值效果较差,容易产生龙格现象等。
二次拉格朗日插值公式在实际应用中有很多场景。
例如,在信号处理中,我们经常需要对离散信号进行插值,以便恢复缺失的信号或者提高信号的采样率。
二次拉格朗日插值公式可以很好地完成这个任务。
另外,在图像处理中,我们常常需要对图像进行放大或缩小操作,这也可以通过插值来实现。
二次拉格朗日插值公式在图像处理中有着广泛的应用,并且取得了良好的效果。
除了一维插值问题,二次拉格朗日插值公式还可以推广到高维插值问题。
例如,在二维图像处理中,我们可以通过已知的四个像素点来估计未知像素点的值。
这个问题可以通过二次拉格朗日插值公式进行求解,得到较为准确的估计值。
二次拉格朗日插值公式是一种常用且有效的插值方法,广泛应用于数学和工程领域。
它通过已知数据点来估计未知数据点的值,具有简单易用、计算量小的优点。
在实际应用中,二次拉格朗日插值公式被广泛应用于信号处理、图像处理、数据拟合等领域。
二次插值法亦是用于一元函数在确定的初始区间搜索极小点的一种方法。
它属于曲线拟合方法的畴。
一、基本原理在求解一元函数的极小点时,常常利用一个低次插值多项式来逼近原目标函数,然后求该多项式的极小点(低次多项式的极小点比较容易计算),并以此作为目标函数的近似极小点。
如果其近似的程度尚未达到所要求的精度时,可以反复使用此法,逐次拟合,直到满足给定的精度时为止。
常用的插值多项式为二次或三次多项式,分别称为二次插值法和三次插值法。
这里我们主要介绍二次插值法的计算公式。
假定目标函数在初始搜索区间中有三点、和,其函数值分别为、和(图1},且满足,,即满足函数值为两头大中间小的性质。
利用这三点及相应的函数值作一条二次曲线,其函数为一个二次多项式(1)式中、、为待定系数。
图1根据插值条件,插值函数与原函数在插值结点、、处函数值相等,得(2)为求插值多项式的极小点,可令其一阶导数为零,即(3)解式(3)即求得插值函数的极小点(4)式(4)中要确定的系数可在方程组(2)中利用相邻两个方程消去而得:(5)(6)将式(5)、(6)代入式(4)便得插值函数极小值点的计算公式:(7)把取作区间的另一个计算点,比较与两点函数值的大小,在保持两头大中间小的前提下缩短搜索区间,从而构成新的三点搜索区间,再继续按上述方法进行三点二次插值运算,直到满足规定的精度要求为止,把得到的最后的作为的近似极小值点。
上述求极值点的方法称为三点二次插值法。
为便于计算,可将式(7)改写为(8)式中:(9)(10)二、迭代过程及算法框图(1)确定初始插值结点通常取初始搜索区间的两端点及中点为,,。
计算函数值,,,构成三个初始插值结点、、。
(2)计算二次插值函数极小点按式(8)计算,并将记作点,计算。
若本步骤为对初始搜索区间的第一次插值或点仍为初始给定点时,则进行下一步(3);否则转步骤(4)(3)缩短搜索区间缩短搜索区间的原则是:比较函数值、,取其小者所对应的点作为新的点,并以此点左右两邻点分别取作新的和,构成缩短后的新搜索区间。
二次插值算法范文二次插值算法是一种在离散数据点之间进行数据估计的方法,它通过利用已知数据点及其相邻数据点的信息,来计算出两个数据点之间的值。
二次插值算法可以应用于图像处理、信号处理、数值分析等领域,在实际应用中具有很高的效率和准确性。
二次插值算法的基本原理是通过已知的数据点来构造一个二次函数,然后利用这个函数来估计两个数据点之间的值。
具体而言,假设我们有一组数据点{(x1, y1), (x2, y2), ..., (xn, yn)},我们希望估计在一些位置x处的值y。
首先,我们选择x所在的两个已知数据点,假设它们分别为(xi, yi)和(xi+1, yi+1),然后我们构造一个二次函数f(x) = ax^2 + bx + c,满足条件f(xi) = yi和f(xi+1) = yi+1、通过解这个方程组,我们可以得到二次函数的系数a、b和c,然后通过计算f(x)即可得到在位置x处的估计值y。
下面我们来具体讨论二次插值算法的实现。
首先,我们需要定义一个函数quadratic_interpolation,它接受三个参数:x, data和index。
其中x为需要估计的位置,data为已知的数据点集合,index为x所在的两个数据点的索引。
```pythondef quadratic_interpolation(x, data, index):x0, y0 = data[index]x1, y1 = data[index + 1]a=(y0-2*y1+y2)/((x0-x1)*(x0-x2))b=(y1-y0)/(x1-x0)-a*(x0+x1)c=y0-a*x0**2-b*x0return a*x**2 + b*x + c```在这段代码中,我们首先通过传入的index参数找到x所在的两个数据点,然后根据这两个数据点构造二次函数的系数a、b和c,并最终返回在位置x处的估计值。
接下来,我们可以使用这个二次插值算法来对一组数据进行插值。
二次拉格朗日插值公式\[ P(x) = f(x_0)\frac{(x-x_1)(x-x_2)}{(x_0-x_1)(x_0-x_2)} + f(x_1)\frac{(x-x_0)(x-x_2)}{(x_1-x_0)(x_1-x_2)} +f(x_2)\frac{(x-x_0)(x-x_1)}{(x_2-x_0)(x_2-x_1)} \]其中,\(P(x)\)表示通过插值得到的二次函数的值,\(f(x_i)\)表示已知数据点处的函数值,\(x_i\)表示已知数据点的横坐标,\(x\)表示要求解的点的横坐标。
下面我们来详细解释一下二次拉格朗日插值公式的原理和推导过程。
\[P(x)=a(x-x_1)(x-x_2)+b(x-x_0)(x-x_2)+c(x-x_0)(x-x_1)\]其中,\(a,b,c\)是待定系数。
我们要按照已知数据点的函数值来确定这些系数。
首先,我们将\(P(x)\)代入上面的公式中,得到:\[P(x_0)=a(x_0-x_1)(x_0-x_2)+b(x_0-x_0)(x_0-x_2)+c(x_0-x_0)(x_0-x_1)\]\[P(x_1)=a(x_1-x_1)(x_1-x_2)+b(x_1-x_0)(x_1-x_2)+c(x_1-x_0)(x_1-x_1)\]\[P(x_2)=a(x_2-x_1)(x_2-x_2)+b(x_2-x_0)(x_2-x_2)+c(x_2-x_0)(x_2-x_1)\]化简上述方程组,继续得到:\[P(x_0)=a(x_0-x_1)(x_0-x_2)\]\[P(x_1)=c(x_1-x_0)(x_1-x_1)\]\[P(x_2)=b(x_2-x_0)(x_2-x_2)\]由于\((x_0-x_1),(x_0-x_2),(x_1-x_0),(x_1-x_2),(x_2-x_0),(x_2-x_1)\)这些差值均不等于零,所以我们可以通过上面的方程组解出\(a,b,c\)的值。
已知:F(x)=x4-4x3-6x2-16x+4,求极小值,极小值点,区间,迭代次数?用进退法确定区间,用黄金分割法求极值。
#include <stdio.h>#include <math.h>#define e 0.001#define tt 0.01float f(double x){float y=pow(x,4)-4*pow(x,3)-6*pow(x,2)-16*x+4;return(y);}finding(float *p1,float*p2){float x1=0,x2,x3,t,f1,f2,f3,h=tt;int n=0;x2=x1+h;f1=f(x1);f2=f(x2);if(f2>f1) {h=-h;t=x2;x2=x1;x1=t;}do{ x3=x2+h;h=2*h;f3=f(x3);n=n+1;}while(f3<f2);if(x1>x3) {t=x1;x1=x3;x3=t;}*p1=x1;*p2=x3;return(n);}gold(float *p){float a,b,x1,x2,f1,f2; int n=0;finding(&a,&b);do{x1=a+0.382*(b-a);x2=a+0.618*(b-a);f1=f(x1);f2=f(x2);n=n+1;if(f1>f2) a=x1;else b=x2;}while((b-a)>e);*p=(x1+x2)/2;return(n);}main(){float a,b,x,min;int n1,n2;n1=finding(&a,&b);n2=gold(&x);min=f(x);printf("\n The area is %f to %f.",a,b); printf("\n The nunmber 1 is %d.",n1);printf("\n The min is %f and the result is %f.",x,min);printf("\n The nunmber 2 is %d.",n2)二插法已知:F(x1,x2)=4*x1-x2的平方-12;求极小值,极小值点,迭代次数?用复合形法求极值。
实验报告计算方法算法设计及其MATLAB实现院系:数学科学学院专业:学号:姓名:实验1 插值方法——拉格朗日插值法一、实验目的[1] 了解lagrange 插值法的基本原理和方法; [2] 通过实例掌握用MA TLAB 求插值的方法; [3] 编程实现lagrange 插值二、方法原理Lagrange 插值公式y= j ni nij j y ∑∏=≠≠0ji j,0x -x x -x )(,两点插值和三点插值分别是lagrange的n=1,2的特殊情况。
Lagrange 的插值算法:没给定数据表(i i y x ,),i=0,1,2…….n 及插值点x ,根据lagrange 求得的插值结果y 。
三、实验流程(略)四、实验内容 MA TLAB 文件:function [y0,N]=Lagrange_eval(X,Y,x0) format long e ; m=length(X); N=zeros(m,1); y0=0; for i=1:m N(i)=1; for j=1:m if j~=iN(i)=N(i)*(x0-X(j))/(X(i)-X(j)); end endy0=y0+Y(i)*N(i);end算例:已知f(x)=lnx的数值表如下,计算lagrange插值多项式在x=x0处的值。
表 1解答结果:线性插值结果:二次插值结果:三次插值结果:五、实验分析而ln0.45准确值为 -0.79850769621777,针对所给数据表时运用插值方法,人们往往迭代的插值节点越多,插值结果就越准确,这种观点并不一定可靠,实际计算结果表明,如果选取的节点越多,lagrange 插值结果反而会严重失真,因此,我们要因题选取适当的节点。
实验二、插值方法——Hermite 插值一、实验目的1、学习和掌握Hermite 算法的思想;2、学会利用分段三次Hermite 插值计算插值点处的函数近似值。
二、插值算法的基本思想:函数的变化规律往往是通过一组实验数据给出,为了研究此变化规律往往需要求出不在表上的一些函数值。
简述二次插值法的迭代过程一、原理介绍二次插值法是一种基于二次函数的插值方法,它利用已知的两个点的函数值和导数值,通过构建一个二次插值多项式,来逼近函数的根。
该方法的基本思想是,通过构造一个二次函数,使得该函数与待求解的非线性方程在两个已知点处的函数值和导数值相等,然后利用二次插值多项式的根来逼近方程的根。
二、迭代步骤二次插值法的迭代步骤如下:1. 选择两个初始点a和b,使得f(a)和f(b)异号,即f(a) * f(b) < 0。
这样可以保证方程在[a, b]之间存在根。
2. 在[a, b]区间内,根据二次插值多项式的构造原理,可以得到一个二次函数p(x),使得p(a) = f(a),p(b) = f(b),p'(a) = f'(a),p'(b) = f'(b)。
其中,f(x)为待求解的非线性方程。
3. 求解二次函数p(x)的根x0,即p(x0) = 0。
可以通过求解二次方程的公式来得到根的近似值。
4. 判断x0是否在[a, b]区间内。
如果x0不在[a, b]区间内,则重新选择a和b,并返回第2步。
如果x0在[a, b]区间内,则进入下一步。
5. 判断f(x0)的值是否满足收敛条件,即|f(x0)| < ε,其中ε为预设的收敛精度。
如果满足收敛条件,则x0为方程的近似解,结束迭代。
如果不满足收敛条件,则将x0作为新的b值,并重新选择一个新的a值,并返回第2步。
三、迭代收敛性二次插值法的迭代过程中,根的选择和收敛性是关键。
在选择根的初始点a和b时,需要满足f(a) * f(b) < 0,这样可以保证方程在[a, b]之间存在根。
在选择新的a和b时,一般会选择离根较近的点,以加快迭代速度。
对于二次插值法的收敛性,一般情况下是收敛的。
但是,如果方程的根处于函数的驻点或拐点附近,可能会导致迭代过程发散。
因此,在实际应用中,需要对迭代过程进行控制,设置合适的迭代次数或收敛精度,以确保迭代过程的稳定性和收敛性。
已知:F(x)=x4-4x3-6x2-16x+4,求极小值,极小值点,区间,迭代次数?用进退法确定区间,用黄金分割法求极值。
#include <stdio.h>#include <math.h>#define e 0.001#define tt 0.01float f(double x){float y=pow(x,4)-4*pow(x,3)-6*pow(x,2)-16*x+4;return(y);}finding(float *p1,float*p2){float x1=0,x2,x3,t,f1,f2,f3,h=tt;int n=0;x2=x1+h;f1=f(x1);f2=f(x2);if(f2>f1) {h=-h;t=x2;x2=x1;x1=t;}do{ x3=x2+h;h=2*h;f3=f(x3);n=n+1;}while(f3<f2);if(x1>x3) {t=x1;x1=x3;x3=t;}*p1=x1;*p2=x3;return(n);}gold(float *p){float a,b,x1,x2,f1,f2; int n=0;finding(&a,&b);do{x1=a+0.382*(b-a);x2=a+0.618*(b-a);f1=f(x1);f2=f(x2);n=n+1;if(f1>f2) a=x1;else b=x2;}while((b-a)>e);*p=(x1+x2)/2;return(n);}main(){float a,b,x,min;int n1,n2;n1=finding(&a,&b);n2=gold(&x);min=f(x);printf("\n The area is %f to %f.",a,b); printf("\n The nunmber 1 is %d.",n1);printf("\n The min is %f and the result is %f.",x,min);printf("\n The nunmber 2 is %d.",n2)二插法已知:F(x1,x2)=4*x1-x2的平方-12;求极小值,极小值点,迭代次数?用复合形法求极值。
二次插值算法范文二次插值算法是一种用于对离散数据进行插值的方法,通过对已知数据点进行曲线拟合,从而估计出未知位置上的函数值。
在数学上,二次插值是指使用二次多项式对数据进行拟合,通过拟合出的二次多项式函数来计算未知位置的值。
二次插值算法的基本原理是,在已知的数据点上找到拟合的二次多项式,然后利用该多项式来计算未知位置上的函数值。
为了进行二次插值,至少需要三个已知数据点,这是因为二次多项式需要有三个参数来确定。
以二维数据点为例,已知的数据点可以表示为{(x1,y1),(x2,y2),(x3,y3)}。
其中,x1,x2,x3是已知点的横坐标,y1,y2,y3是已知点的纵坐标。
首先,我们需要构建一个二次多项式来拟合数据。
二次多项式的一般形式为f(x) = ax^2 + bx + c。
参数a, b, c可以通过解一个线性方程组来确定。
我们将已知数据带入二次多项式,得到以下三个方程:(1)a*x1^2+b*x1+c=y1(2)a*x2^2+b*x2+c=y2(3)a*x3^2+b*x3+c=y3解这个线性方程组可以得到a,b,c的值。
可以使用各种方法来求解线性方程组,例如高斯消元法、LU分解法或矩阵求逆法。
在得到了a,b,c 的值之后,我们就可以构建出一个二次多项式。
接下来,我们可以使用这个二次多项式来估计未知位置上的函数值。
例如,我们要估计一个未知的函数值f(x4),其中x4是一个不在已知数据点中的位置,我们可以将x4带入二次多项式,即f(x4)=a*x4^2+b*x4+c。
二次插值算法的优点是计算相对简单,而且通常能够在一定程度上准确地估计未知位置上的函数值。
但是,二次插值算法也存在一些问题。
首先,由于二次多项式的局限性,它只能够对简单的数据进行拟合,而对于复杂的数据,可能无法很好地进行拟合。
其次,二次插值算法的计算结果容易受到离散数据的噪声干扰,从而导致插值结果不准确。
为了解决这些问题,可以使用更高阶的插值算法,例如三次插值算法或样条插值算法。
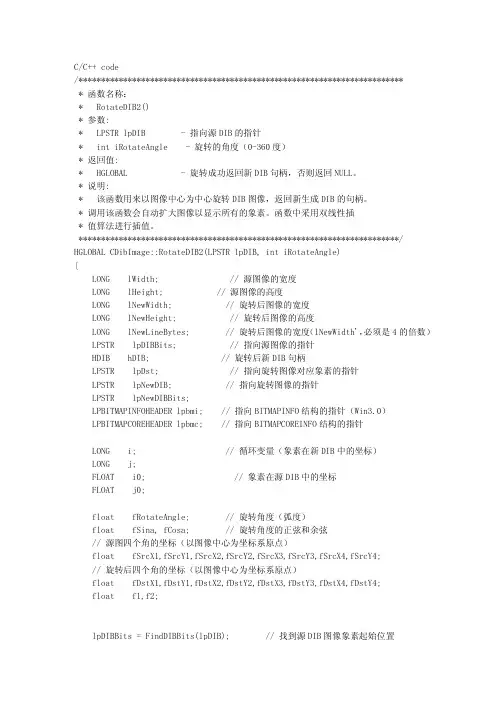
Visual C++实现二值图像处理二值图像是一种简单的图像格式,它只有两个灰度级,即"0"表示黑色的像素点,"255"表示白色的像素点,至于如何从一幅普通的图像获得二值图像,请参考我近期在天极网上发表的《Visual C++编程实现图像的分割》一文。
二值图像处理在图像处理领域占据很重要的位置,在具体的图像处理应用系统中,往往需要对于获得的二值图像再进一步进行处理,以有利于后期的识别工作。
二值图像处理运算是从数学形态学下的集合论方法发展起来的,尽管它的基本运算很简单,但是却可以产生复杂的效果。
常用的二值图像处理操作有许多方法,如腐蚀、膨胀、细化、开运算和闭运算等等。
本文对这些内容作些研究探讨,希望对爱好图像处理的朋友有所帮助。
一、腐蚀和膨胀形态学是一门新兴科学,它的用途主要是获取物体拓扑和结果信息,它通过物体和结构元素相互作用的某些运算,得到物体更本质的形态。
它在图像处理中的应用主要是:1.利用形态学的基本运算,对图像进行观察和处理,从而达到改善图像质量的目的;2.描述和定义图像的各种几何参数和特征,如面积,周长,连通度,颗粒度,骨架和方向性。
限于篇幅,我们只介绍简单二值图像的形态学运算,对于灰度图像的形态学运算,有兴趣的读者可以看有关的参考书。
二值图像基本的形态学运算是腐蚀和膨胀,简单的腐蚀是消除物体的所有边界点的一种过程,其结果是使剩下的物体沿其周边比原物体小一个像素的面积。
如果物体是圆的,它的直径在每次腐蚀后将减少两个像素,如果物体在某一点处任意方向上连通的像素小于三个,那么该物体经过一次腐蚀后将在该点处分裂为二个物体。
简单的膨胀运算是将与某物体接触的所有背景点合并到该物体中的过程。
过程的结果是使物体的面积增大了相应数量的点,如果物体是圆的,它的直径在每次膨胀后将增大两个像素。
如果两个物体在某一点的任意方向相隔少于三个像素,它们将在该点连通起来。
下面给出具体的实现腐蚀和膨胀的函数代码:////////////////////////////////二值图像腐蚀操作函数从上面的说明可以看出,腐蚀可以消除图像中小的噪声区域,膨胀可以填补物体中的空洞。
题目:利用二次插值法求()f sin αα=在4≤α≤5上的极小点。
利用VC++6.0进行编程,求得极小点。
具体程序如下说明。
一、 二次插值法
求解原理:在求解一元函数的极小点时,常常利用一个低次插值多项式 来逼近原目标函数,然后求该多项式的极小点(低次多项式的极小点比较容易计算),并以此作为目标函数的近似极小点。
如果其近似的程度尚未达到所要求的精度时,可以反复使用此法,逐次拟合,直到满足给定的精度时为止。
二次差值的程序流程图
程序如下:
#include "stdio.h"
#include "math.h"
#define f(x) sin(x)//宏定义函数f(x)
int main()
{
//////////////////////////////////////////////////////////////////////////二次插值法
printf("*************************************二次插值法************************************\n");
float m1=4,m2=4.5,m3=5,w=1,s;
float h1,h2,h3,hp,c1,c2,mp;
s=1e-5;
int i=0;
h1=f(m1);
h2=f(m2);
h3=f(m3);
c1=(h3-h1)/(m3-m1);
c2=((h2-h1)/(m2-m1)-c1)/(m2-m3);
mp=(m1+m3-(c1/c2))/2;
hp=f(mp);
while (fabs((m2-mp)/m2)>=s)
{
i++;
if ((mp-m2)*w>0)
{
if (h2>=hp)
{
m1=m2;
h1=h2;
m2=mp;
h2=hp;
}
else
{
m3=mp;
h3=hp;
}
}
else
{
if (h2>=hp)
{
m3=m2;
h3=h2;
m2=mp;
h2=hp;
}
else
{
m1=mp;
h1=hp;
}
}
h1=f(m1);
h2=f(m2);
h3=f(m3);
c1=(h3-h1)/(m3-m1);
c2=((h2-h1)/(m2-m1)-c1)/(m2-m3);
mp=(m1+m3-c1/c2)/2;
hp=f(mp);
printf("%f\n",mp);
}
printf("\n");
printf("迭代次数:%d\n",i);
printf("得到的近似极小点:%f\n",mp);
printf("相应的函数值:%f\n",f(mp));
printf("**************************************************************************\n"); }
运行结果:
总结
如上所述,运用二次插值法求得了已知函数的极小值。
运用VC++6.0实现编译,得到所要的结果。
运算结果接近,证明程序编译正确。