凸轮理论轮廓曲线设计c语言程序
- 格式:doc
- 大小:31.50 KB
- 文档页数:4

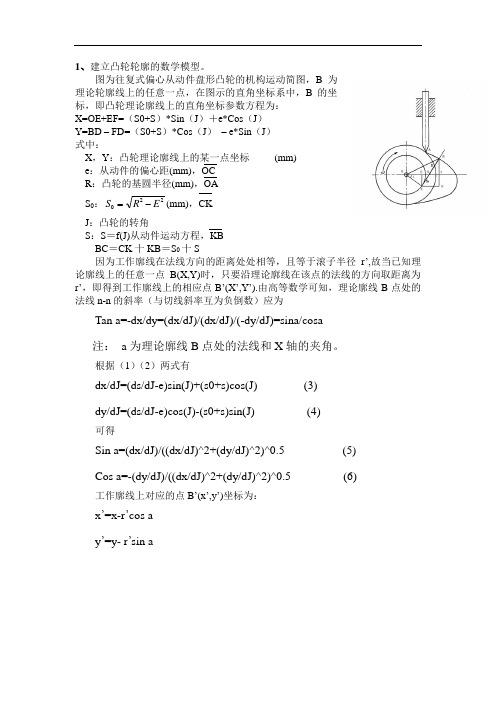
1、建立凸轮轮廓的数学模型。
图为往复式偏心从动件盘形凸轮的机构运动简图,B 为理论轮廓线上的任意一点,在图示的直角坐标系中,B 的坐标,即凸轮理论廓线上的直角坐标参数方程为:X=OE+EF=(S0+S )*Sin (J )+e*Cos (J )Y=BD – FD=(S0+S )*Cos (J ) – e*Sin (J )式中:X ,Y :凸轮理论廓线上的某一点坐标 (mm)e :从动件的偏心距(mm),OCR :凸轮的基圆半径(mm),OAS 0:220E R S -=(mm),CKJ :凸轮的转角 S :S =f(J)从动件运动方程,KBBC =CK 十KB =S 0十S因为工作廓线在法线方向的距离处处相等,且等于滚子半径r ’,故当已知理论廓线上的任意一点B(X,Y)时,只要沿理论廓线在该点的法线的方向取距离为r ’,即得到工作廓线上的相应点B ’(X ’,Y ’).由高等数学可知,理论廓线B 点处的法线n-n 的斜率(与切线斜率互为负倒数)应为 Tan a=-dx/dy=(dx/dJ)/(dx/dJ)/(-dy/dJ)=sina/cosa注: a 为理论廓线B 点处的法线和X 轴的夹角。
根据(1)(2)两式有dx/dJ=(ds/dJ-e)sin(J)+(s0+s)cos(J) (3)dy/dJ=(ds/dJ-e)cos(J)-(s0+s)sin(J) (4)可得Sin a=(dx/dJ)/((dx/dJ)^2+(dy/dJ)^2)^0.5 (5)Cos a=-(dy/dJ)/((dx/dJ)^2+(dy/dJ)^2)^0.5 (6)工作廓线上对应的点B ’(x ’,y ’)坐标为:x ’=x-r ’cos ay ’=y- r ’sin a2、从动件运行规律:五次多项式运行规律推程(升)δ1远休止(停)δ2回程(降)δ3近休止(停)δ4等加速等减速S1=10h(δ/δ1)^3-15h (δ/δ1)^4+6h(δ/δ1)^5); S2=h 等减速等加速S1=h-h(10(δ/δ3)^3-15(δ/δ3)^4+6(δ/δ3)^5)S4=03、绘制凸轮曲线的程序框图(1)升回程运动函数的子程序框图(2)d s/dδ运动函数的子程序框图while(3)绘制凸轮轮廓的主程序框图(4)绘制S-δ曲线的程序框图4.编程%(1)升回程运动函数的子程序%s.mfunction y = s(x) %申明从动件运行规律函数deg=pi/180; %转化为弧度制的参数h=8; %从动件行程if (x<0)|(x>2*pi)error('Input Range error(0~2*pi)'); elseif x<(60*deg)&(x>=0)y=h*(10*(x/(60*deg))^3-15*(x/(60*deg))^4+6*(x/(60*deg))^5); %升程运动规律elseif(x>=60*deg)&(x<70*deg)y=h; %远休运动规律elseif(x>=70*deg)&(x<130*deg)y=h-h*(10*((x-70*deg)/(60*deg))^3-15*((x-70*deg)/(60*deg))^4+6*((x-70*deg)/(60 *deg))^5);%回程运动规律elsey=0; %近休运动规律endendendend%(2)绘制ds/dδ运动函数的子程序%ds.mfunction d=ds(x) %申明ds/dδ运行规律函数h=8; %凸轮2行程deg=pi/180;if (x<0)|(x>2*pi)error('Input Range error(0~2*pi)');elseif x<(60*deg)&(x>=0)d=h/(60*deg)*((30*(x/(60*deg))^2-60*(x/(60*deg))^3+30*(x/(60*deg))^4)); %对S求导elseif(x>=60*deg)&(x<70*deg)d=0; %对S求导elseif(x>=70*deg)&(x<130*deg)d=-h/(60*deg)*((30*((x-70*deg)/(60*deg))^2-60*((x-70*deg)/(60*deg))^3+30*((x-7 0*deg)/(60*deg))^4)); %对S求导elsed=0; %对S求导endendendend%(3)绘制凸轮轮廓的主程序%main.mclear;i=1;r0=55; %基圆半径rr=4; %滚子圆半径e=0; %偏距eta=1; %凸轮顺时钉转向s0=(r0^2-e^2)^0.5;deg=pi/180;st=0.05*deg; %步长a=0;while (a<2*pi)x(i)=(s(a)+s0)*sin(eta*a)-e*cos(eta*a); %定义理论轮廓线的X座标y(i)=(s(a)+s0)*cos(eta*a)+e*sin(eta*a); %定义理论轮廓线的Y座标dx=ds(a)*sin(eta*a)-eta*(s(a)+s0)*cos(eta*a)-e*eta*sin(eta*a);dy=ds(a)*cos(eta*a)+eta*(s(a)+s0)*sin(eta*a)-e*eta*cos(eta*a);sino=dx/(dx^2+dy^2)^0.5;coso=dy/(dx^2+dy^2)^0.5;X(i)=x(i)-rr*coso; %定义实际轮廓线的X座标Y(i)=y(i)+rr*sino; %定义实际轮廓线的Y座标i=i+1;a=a+st;endplot(x,y,X,Y); %绘制理论和实际轮廓线axis('square','equal');grid on主程序运行的结果为凸轮轮廓曲线:%(4)绘制S-δ曲线的程序为:%myline.mh=10;deg=pi/180;t1=linspace(0,60*pi/180); %定义升程角范围y1=h*(10*(t1/(60*deg)).^3-15*(t1/(60*deg)).^4+6*(t1/(60*deg)).^5); %升程运动规律t2=linspace(60*pi/180,70*pi/180); %定义远休角范围y2=h; %远休运动规律t3=linspace(70*pi/180,130*pi/180); %定义回程角范围y3=h-h*(10*((t3-70*deg)/(60*deg)).^3-15*((t3-70*deg)/(60*deg)).^4+6*((t3-70*deg)/(60*deg)). ^5);%回程运动规律t4=linspace(130*pi/180,360*pi/180); %定义近休角范围y4=0; %近休运动规律plot(t1,y1,t2,y2,t3,y3,t4,y4) %绘制S-δ曲线xlabel('t');ylabel('y');grid程序运行的结果为:。
![凸轮轮廓曲线的设计[精]](https://img.taocdn.com/s1/m/7c1b767efe4733687e21aa33.png)

ClsDim t(7) as doubleDim p(7) as doubleDim f(7) as doubleDim c(7) as doubleDim b(7) as doubleDim jsd(7) as doubleDim yd(7) as doubleDim sd(7) as doubleDim wy(7) as doubleDim pi as doubleDim a1 as doubleDim a2 as doubleDim m as doubleDim i as doubleDim j as doubleDim mc as doubleDim ss as doubleJ=0Dim tt as doubleDim aa as doubleStar:Pi=3.1415926ss=”请选择通用间歇体形曲线的名称:”& chr(10)+chr(13)&”1、修正等速“& chr(10)+chr(13)&”2、修正梯形”& chr(10)+chr(13) &”3、修正正弦”mc=inputbox(ss)if mc=1 thent(0)=0t(1)=1/16t(2)=1/16t(3)=1/4t(4)=3/4t(5)=15/16t(6)=15/16t(7)=1if mc=2 thent(0)=0t(1)=1/8t(2)=3/8t(3)=1/2t(4)=1/2t(5)=5/8t(6)=7/8t(7)=1elseif mc=3 thent(0)=0t(1)=1/8t(2)=1/8t(3)=1/2t(4)=1/2t(5)=7/8t(6)=7/8t(7)=1elsemsgbox(“请输入1-3的数”)goto startend iffor i= 1 to7f(i)=2*(t(i)-f(i-1))/pinext im=(f(1)+f(2)*pi/2+f(3))/(f(5)+f(6)*pi/2+f(7))a1=(f(3)^2+0.5*((t(2)-t(1))^2)-f(1)^2+f(3)*(1-t(3))+(t(2)-t(1))*(1-t(2))+f(1)-m*(f(7)^2+0.5*((t(6) -t(5))^2)- f(5)^2+f(5)*(1-t(4))+(t(6)-t(5))*(1-t(6))))^(-1)a2=m*a1c(1)=f(1)*a1c(2)=-t(1)*a1+c(1)c(3)= t(2)*a1+c(2)c(4)= f(3)*a1+c(3)c(5)=-f(5)*a2+c(4)c(6)=t(5)*a2+c(5)c(7)=- t(6)*a2+c(6)b(1)=0b(2)=-a1*(f(1)^2+0.5*t(1)^2)+t(1)*(c(1)-c(2))+b(1)b(3)= a1*(f(3)^2+0.5*t(2)^2)+t(2)* (c(2)-c(3))+b(2)b(4)=t(3)*(c(3)-c(4))+b(3)b(5)=t(4)*(c(4)-c(5))+b(4)b(6)=a(2)*(f(5)^2+0.5*t(5)^2)+t(5)*(c(5)-c(6))+b(5)b(7)=-a(2)*(f(7)^2+0.5*t(6)^2)+t(6)*(c(6)-c(7))+b(6)for tt=0 to 1 step 0.01for i=1 to 7select case icase 1 and (tt>=t(0) and tt<=t(1))p(i)=(tt-t(i-1))/f(i)+(i-1)*pi/4j=j+1jsd(j)=a1*sin(p(i))yd(j)=a1*cos(p(i))/pisd(j)= -a1*f(1)*cos(p(i))+c(i)wy(j)=-a1*(f(i)^2)*sin(p(i))+c(i)*c(i)*tt+b(i)open “d:\加速度.txt”for append as #1 print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1 print #1,yd(j)closeopen “d:\速度.txt”for append as #1 print #1,sd(j)closeopen “d:\位移.txt”for append as #1 print #1,wy(j)closecase 2 and (tt>t(1)and tt<=t(2))j=j+1jsd(j)=a1yd(j)=0sd(j)=a1*tt+c(2)wy(j)=a1*(tt^2)*0.5+c(2)*tt+b(2)open “d:\加速度.txt”for append as #1 print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1 print #1,yd(j)closeopen “d:\速度.txt”for append as #1 print #1,sd(j)closeopen “d:\位移.txt”for append as #1 print #1,wy(j)closecase 3 and (tt>t(2)and tt<=t(3))p(i)=(tt-t(i-1))/f(i)+(i-1)*pi/4j=j+1jsd(j)=a1*sin(p(i))yd(j)=a1*cos(p(i))/f(i)sd(j)=-a1*f(i)*cos(p(i))+c(i)*ttwy(j)= -a1*(f(i)^2)*sin(p(i))+c(i)*tt+b(i) open “d:\加速度.txt”for append as #1 print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1 print #1,yd(j)closeopen “d:\速度.txt”for append as #1closeopen “d:\位移.txt”for append as #1 print #1,wy(j)closecase 4 and (tt>t(3)and tt<=t(4))j=j+1jsd(j)=0yd(j)=0sd(j)=c(4)wy(j)=c(4)*tt+b(4)open “d:\加速度.txt”for append as #1 print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1 print #1,yd(j)closeopen “d:\速度.txt”for append as #1 print #1,sd(j)closeopen “d:\位移.txt”for append as #1 print #1,wy(j)closecase 5 and (tt>t(4)and tt<=t(5))p(i)=(tt-t(i-1))/f(i)+(i-1)*pi/4j=j+1jsd(j)=a2*sin(p(i))yd(j)=a2*cos(p(i))/f(i)sd(j)=-a2*f(i)*cos(p(i))+c(i)*ttwy(j)= -a2*(f(i)^2)*sin(p(i))+c(i)*tt+b(i) open “d:\加速度.txt”for append as #1 print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1 print #1,yd(j)closeopen “d:\速度.txt”for append as #1 print #1,sd(j)closeopen “d:\位移.txt”for append as #1 print #1,wy(j)closecase 6 and (tt>t(5)and tt<=t(6))j=j+1yd(j)=0sd(j)=-a1*tt+c(6)wy(j)=-a1*(tt^2)*0.5+c(6)*tt+b(6)open “d:\加速度.txt”for append as #1print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1print #1,yd(j)closeopen “d:\速度.txt”for append as #1print #1,sd(j)closeopen “d:\位移.txt”for append as #1print #1,wy(j)closecase 7 and (tt>t(6)and tt<=t(7))p(i)=(tt-t(i-1))/f(i)+(i-1)*pi/4j=j+1jsd(j)=a2*sin(p(i))yd(j)=a2*cos(p(i))/f(i)sd(j)=-a2*f(i)*cos(p(i))+c(i)wy(j)= -a2*(f(i)^2)*sin(p(i))+c(i)*tt+b(i)open “d:\加速度.txt”for append as #1print #1,jsd(j)closeopen “d:\跃度.txt”for append as #1print #1,yd(j)closeopen “d:\速度.txt”for append as #1print #1,sd(j)closeopen “d:\位移.txt”for append as #1print #1,wy(j)closeend selectnext inext iimsgbox (“计算完毕”&chr(10)+chr(13)&”位移数据在d:\位移.txt” &chr(10)+chr(13)& ”速度数据在d:\速度.txt”&chr(10)+chr(13)&”加速度数据在d:\加速度.txt”&chr(10)+chr(13)& ”跃度数据在d:\位移.txt”)msbox(“输出图形“)for i=1 to 1200 step 2form1.currentx=i*5+100print”.”Nextfor i=1 to 101currentx=i*20+1500 currenty=-wy(i)*600+1500 print”.”Nextcurrentx=1500currenty=2500print”位移曲线”for i=1500 to 3000 step 2 form1.currentx=i*5+100 form1.currenty=1500 print”.”Nextfor i=1 to 101currentx=i*20+8500 currenty=-sd(i)*200+1500 print”.”Nextcurrentx=9500currenty=2500print”速度曲线”for i=1 to 1200 step 2 form1.currentx=i*5+100 form1.currenty=5500 print”.”Nextfor i=1 to 1000 step 2 form1.currentx=i*2+5000 form1.currenty=1500 print”.”Nextfor i=1 to 101currentx=i*20+1500 currenty=-jsd(i)*50+5500 print”.”Nextcurrentx=2000currenty=7000print”加速度曲线”for i=1500 to 3000 step 2 form1.currentx=i*5+100print”.”Nextfor i=1 to 1000 step 2form1.currentx=i*2+5000form1.currenty=8500 print”.”Nextfor i=1 to 101 step 0.8 currentx=i*20+8500currenty=-yd(i)*6+5500 print”.”Nextcurrentx=9000currenty=7000print”跃度曲线”printprintselect case mccase 1currentx=6000currenty=12000print “修正等速”;”的四个曲线”case 2currentx=6000currenty=12000print “修正梯形”;”的四个曲线”case 3currentx=6000currenty=12000print “修正正弦”;”的四个曲线”end selectend subprivate sub command2_click() endend subend sub。
Dim pi!, p!, i!, F0!, F01!, F02!, L4c!, L24!, r0!, q!, qm!, q0!, Mm!, F!, F1!, R! '程序中F代表δ;q代表φ;st代表θDim F2!, SF!, CF!, X!, Y!, dpdf!, dxdf!, dydf!, st!, X1!, Rr!, X2!, Y2!Print Spc(2); "凸轮转角"; Spc(2); " 摆杆摆角"; Spc(3); " 理论廓线xy值"; Spc(3); "理论廓线向径"; Spc(3); "内实际廓线xy值";Print Spc(3); "外实际廓线xy值"pi = 3.1415926: p = pi / 180: L4c = 140: L24 = 150: F0 = 60: F01 = 10: F02 = 60: r0 = 55: Rr = 15 qm = 15 * p: F0 = F0 * p: F01 = F01 * p: F02 = F02 * pFor i = 0 To 36 Step 1F = 10 * i * pIf F <= F0 / 2 ThenF1 = F / F0: q = 2 * qm * F1 * F1: dqdf = 4 * qm * F1 / F0ElseIf F > F0 / 2 And F <= F0 ThenF1 = (F0 - F) / F0: q = qm - 2 * qm * F1 * F1: dqdf = 4 * qm * F1 / F0ElseIf F > F0 And F < F0 + F01 Thenq = qm: dqdf = 0ElseIf F >= F0 + F01 And F <= F0 + F01 + F0 / 2 ThenF2 = (F - F0 - F01) / F02: q = qm * (1 - 2 * F2 * F2): dqdf = 4 * q * F2 / F02ElseIf F > F0 + F01 + F0 / 2 And F <= F0 + F01 + F0 ThenF2 = (F02 - F + F0 + F01) / F02: q = 2 * qm * F2 * F2: dqdf = 4 * qm * F2 / F02Elseq = 0: dqdf = 0End Ifq0 = Atn(Sqr(1 - ((L24 ^ 2 + L4c ^ 2 - r0 ^ 2) / 2 / L24 / L4c) ^ 2) / ((L24 ^ 2 + L4c ^ 2 - r0 ^ 2) / 2 / L24 / L4c))SF = Sin(F - q - q0)CF = Cos(F - q - q0)Y = L24 * Sin(F) - L4c * SFX = L24 * Cos(F) - L4c * CFR = Sqr(X ^ 2 + Y ^ 2)dydf = L24 * Cos(F) - L4c * Cos(F - q - q0) * (1 - dqdf)dxdf = -L24 * Sin(F) + L4c * Sin(F - q - q0) * (1 - dqdf)st = Atn(-dxdf / dydf)Select Case dydfCase Is > 0If -dxdf < 0 Thenst = 360 * p + stElsest = stEnd IfCase Elsest = 180 * p + stEnd SelectY1 = Y - Rr * Sin(st)X1 = X - Rr * Cos(st)Y2 = Y + Rr * Sin(st)X2 = X + Rr * Cos(st)Print Spc(2); Format(F / p, "0.00"); Spc(7); Format(q / p, "0.00"); Spc(7); Format(X, "0.00"); Print Spc(2); Format(Y, "0.00"); Spc(7); Format(R, "0.00"); Spc(5); Format(X1, "0.00"); Spc(2); Format(Y1, "0.00");Print Spc(7); Format(X2, "0.00"); Spc(2); Format(Y2, "0.00")Next i。
/************习题4-1凸轮轮廓曲线绘制程序**********/#include<stdio.h>#include<math.h>#define PI 3.1415926void main(){double e=10.0,ro=40.0,rt=10.0,h=20.0,phi1=150.0,phis=30.0,phi_1=120.0,phi_s=60;/*各字母含义:e偏距,基圆半径ro,滚子半径rt,行程h,推程运动角phi1,远休止角phis,回程运动角phi_1,近休止角phi_s*/double s,alp[73],x[73],y[73],x1,y1,xr[73],yr[73];/*分别代表从动件位移,压力角,理论轮廓曲线点的位置x,y,x,y对运动角的微分,实际轮廓曲线的位置x,y*/double ic,ic1,ic2,ic3,ic4,so,s1,cop,sip,phi,gam,bel,del=5.0,q,t; /*定义变量*/int i;gam=phi1+phis;bel=phi1+phis+phi_1;ic=(int)(360.0/del);ic1=(int)(phi1/del);ic2=(int)(gam/del);ic3=(int)((phi1+phis+phi_1/2.0)/del);ic4=(int)(bel/del);so=sqrt(ro*ro-e*e);printf("\n No THETA Theoretical contour curve. Actual contour curve of cam. pressure angle \n");/*在屏幕上输出文件头*/printf(" deg x/mm y/mm X/mm Y/mm rad\n");for(i=0;i<=ic;i++) /*每隔五度建立循环*/{phi=i*del*PI/180.0; /*将角度化为幅度*/cop=cos(phi);sip=sin(phi);if(i<=ic1) /*推程运动判断*/{s=h/2.0*(1.0-cos(180.0*phi/phi1));s1=h*PI*sin(180.0*phi/phi1)/2.0/phi1;x1=-(s+so)*sip+s1*cop-e*cop;y1=(s+so)*cop+s1*sip-e*sip;}else if(i<=ic2) /*远休止角*/{s=h;s1=0;x1=-(s+so)*sip-e*cop;y1=(so+s)*cop-e*sip;}else if(i<=ic3) /*回程等加速运动判断*/{s=h-2.0*h*(phi-gam)*(phi-gam)/phi_1/phi_1;s1=-4.0*h*(phi-gam)/phi_1/phi_1;x1=s1*cop-(s+so)*sip-e*cop;y1=s1*sip+(so+s)*cop-e*sip;}else if(i<=ic4) /*回程等减速运动判断*/{s=2.0*h*(bel-phi)*(bel-phi)/phi_1/phi_1;s1=-4.0*h*(bel-phi)/phi_1/phi_1;x1=s1*cop-(so+s)*sip-e*cop;y1=s1*sip+(so+s)*cop-e*sip;}else /*近休止角*/{s=0;s1=0;x1=-(s+so)*sip-e*cop;y1=so*cop-e*sip;}t=fabs(s1-e);alp[i]=atan2(t,(s+so)); /*计算压力角*/q=rt/sqrt(x1*x1+y1*y1);x[i]=(s+so)*cop-e*sip; /*理论轮廓曲线位置*/y[i]=(s+so)*sip+e*cop;xr[i]=x[i]-q*y1; /*实际轮廓曲线位置*/yr[i]=y[i]+q*x1;phi=i*del;printf("\n%2d%12.3f%12.3f%12.3f%12.3f%12.3f%12.3f",i+1,phi,x[i],y[i],xr[i],yr[i],alp[i]);}}凸轮理论轮廓曲线和实际轮廓曲线计算数据(以教材东南大学机械学科组郑文伟,吴克坚主编《机械原理》(第七版)p521页题4-1为例)No THETA Theoretical contour curve. Actual contour curve of cam. pressure angle deg x/mm y/mm X/mm Y/mm rad1 0.000 38.730 10.000 29.047 7.500 0.2532 5.000 37.765 13.342 28.335 10.016 0.2523 10.000 36.620 16.611 27.509 12.490 0.2504 15.000 35.295 19.810 26.567 14.929 0.2485 20.000 33.786 22.939 25.502 17.339 0.2456 25.000 32.089 25.997 24.304 19.721 0.2427 30.000 30.195 28.980 22.960 22.076 0.2388 35.000 28.094 31.879 21.458 24.398 0.2349 40.000 25.776 34.682 19.782 26.677 0.23010 45.000 23.230 37.372 17.919 28.899 0.22611 50.000 20.449 39.927 15.855 31.044 0.22112 55.000 17.426 42.321 13.581 33.090 0.21613 60.000 14.160 44.525 11.089 35.008 0.21214 65.000 10.652 46.506 8.379 36.768 0.20715 70.000 6.912 48.229 5.452 38.336 0.20316 75.000 2.953 49.658 2.318 39.678 0.19817 80.000 -1.205 50.755 -1.008 40.757 0.19418 85.000 -5.534 51.487 -4.504 41.540 0.19019 90.000 -10.000 51.820 -8.142 41.994 0.18720 95.000 -14.564 51.725 -11.887 42.090 0.18421 100.000 -19.178 51.177 -15.700 41.802 0.18122 105.000 -23.793 50.159 -19.534 41.111 0.17823 110.000 -28.352 48.659 -23.341 40.005 0.17624 115.000 -32.798 46.673 -27.068 38.477 0.17425 120.000 -37.070 44.208 -30.661 36.532 0.17226 125.000 -41.109 41.275 -34.065 34.178 0.17127 130.000 -44.856 37.900 -37.226 31.435 0.17028 135.000 -48.253 34.111 -40.094 28.330 0.16929 140.000 -51.250 29.950 -42.620 24.898 0.16930 145.000 -53.800 25.463 -44.762 21.182 0.16831 150.000 -55.862 20.705 -46.485 17.229 0.16932 155.000 -57.453 15.757 -47.810 13.112 0.16933 160.000 -58.608 10.690 -48.770 8.896 0.16934 165.000 -59.317 5.541 -49.360 4.611 0.16935 170.000 -59.574 0.350 -49.574 0.291 0.16936 175.000 -59.378 -4.843 -49.411 -4.030 0.16937 180.000 -58.730 -10.000 -48.872 -8.321 0.16938 185.000 -57.635 -15.081 -47.960 -12.549 0.16939 190.000 -56.072 -20.041 -46.656 -16.673 0.16940 195.000 -54.109 -24.851 -45.023 -20.675 0.16941 200.000 -51.736 -29.472 -43.049 -24.520 0.16942 205.000 -48.969 -33.868 -40.746 -28.177 0.16943 210.000 -45.829 -38.007 -38.134 -31.620 0.16944 215.000 -42.341 -41.855 -35.232 -34.823 0.16945 220.000 -38.530 -45.385 -32.061 -37.759 0.16946 225.000 -34.427 -48.569 -28.647 -40.409 0.16947 230.000 -30.062 -51.383 -25.015 -42.750 0.16948 235.000 -25.468 -53.806 -21.193 -44.766 0.16949 240.000 -20.680 -55.819 -17.210 -46.441 0.16950 245.000 -7.306 -39.330 -5.481 -29.498 0.25351 250.000 -3.867 -39.862 -2.896 -29.909 0.25252 255.000 -0.379 -40.051 -0.278 -30.052 0.25253 260.000 3.113 -39.934 2.342 -29.964 0.25254 265.000 6.581 -39.513 4.944 -29.648 0.25255 270.000 10.000 -38.792 7.510 -29.107 0.25256 275.000 13.343 -37.775 10.019 -28.343 0.25257 280.000 16.585 -36.470 12.451 -27.365 0.25258 285.000 19.701 -34.888 14.790 -26.177 0.25259 290.000 22.668 -33.041 17.016 -24.791 0.25260 295.000 25.462 -30.942 19.113 -23.216 0.25261 300.000 28.063 -28.607 21.065 -21.463 0.25262 305.000 30.406 -25.990 22.805 -19.492 0.25363 310.000 32.555 -23.241 24.417 -17.431 0.25364 315.000 34.457 -20.315 25.843 -15.236 0.25365 320.000 36.097 -17.235 27.072 -12.926 0.25366 325.000 37.461 -14.023 28.096 -10.517 0.25367 330.000 38.541 -10.705 28.906 -8.028 0.25368 335.000 39.327 -7.305 29.495 -5.479 0.25369 340.000 39.814 -3.849 29.861 -2.887 0.25370 345.000 39.998 -0.365 29.999 -0.274 0.25371 350.000 39.878 3.123 29.908 2.342 0.25372 355.000 39.454 6.586 29.591 4.940 0.25373 360.000 38.730 10.000 29.047 7.500 0.253。