自动控制理论(答案)(夏德铃)
- 格式:doc
- 大小:3.39 MB
- 文档页数:35

《自动控制理论 (夏德钤)》习题答案详解第二章2-1 试求图2-T-1所示RC 网络的传递函数。
(a)11111111+=+⋅=Cs R R CsR Cs R z ,22R z =,则传递函数为: 2121221212)()(R R Cs R R R Cs R R z z z s U s U i o +++=+= (b) 设流过1C 、2C 的电流分别为1I 、2I ,根据电路图列出电压方程:⎪⎪⎩⎪⎪⎨⎧=++=)(1)()]()([)(1)(2221111s I s C s U s I s I R s I sC s U o i 并且有)()1()(122211s I sC R s I s C += 联立三式可消去)(1s I 与)(2s I ,则传递函数为:1)(1111)()(222111221212211112++++=⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫ ⎝⎛++=s C R C R C R s C C R R R s C R s C s C R sC s U s U i o2-2 假设图2-T-2的运算放大器均为理想放大器,试写出以i u 为输入,o u 为输出的传递函数。
(a)由运算放大器虚短、虚断特性可知:dtduC dt du C R u i i 0+-=,0u u u i c -=, 对上式进行拉氏变换得到)()()(0s sU s sU RCs U i i +-= 故传递函数为RCsRCs s U s U i 1)()(0+=(b)由运放虚短、虚断特性有:022=-+--R u R u u dt du Cc c i c ,0210=+R u R u c ,联立两式消去c u 得到02220101=++⋅u R u R dt du R CR i 对该式进行拉氏变换得0)(2)(2)(20101=++s U R s U R s sU R CR i 故此传递函数为)4(4)()(10+-=RCs R R s U s U i (c)02/2/110=+-+R u R u u dt du Cc c c ,且21R uR u c i -=,联立两式可消去c u 得到 0222101=++⋅Ru R u dt du R CR ii 对该式进行拉氏变换得到0)(2)(2)(2011=++⋅s U Rs U R s sU R CR i i 故此传递函数为RCs R R s U s U i 4)4()()(110+-= 2-3 试求图2-T-3中以电枢电压a u 为输入量,以电动机的转角θ为输出量的微分方程式和传递函数。
自动控制理论第四版课后习题详细解答答案夏德钤翁贻方版集团标准化工作小组 #Q8QGGQT-GX8G08Q8-GNQGJ8-MHHGN#《自动控制理论 (夏德钤)》习题答案详解第二章2-1 试求图2-T-1所示RC 网络的传递函数。
(a)11111111+=+⋅=Cs R R CsR Cs R z ,22R z =,则传递函数为: (b) 设流过1C 、2C 的电流分别为1I 、2I ,根据电路图列出电压方程: 并且有联立三式可消去)(1s I 与)(2s I ,则传递函数为:2-2 假设图2-T-2的运算放大器均为理想放大器,试写出以i u 为输入,o u 为输出的传递函数。
(a)由运算放大器虚短、虚断特性可知:dtduC dt du C R u i i 0+-=,0u u u i c -=, 对上式进行拉氏变换得到 故传递函数为(b)由运放虚短、虚断特性有:022=-+--R u R u u dt du C c c i c ,0210=+R u R u c ,联立两式消去c u 得到 对该式进行拉氏变换得 故此传递函数为 (c)02/2/110=+-+R u R u u dt du Cc c c ,且21R uR u c i -=,联立两式可消去c u 得到 对该式进行拉氏变换得到 故此传递函数为2-3 试求图2-T-3中以电枢电压a u 为输入量,以电动机的转角θ为输出量的微分方程式和传递函数。
解:设激磁磁通f f i K =φ恒定2-4 一位置随动系统的原理图如图2-T-4所示。
电动机通过传动链带动负载及电位器的滑动触点一起移动,用电位器检测负载运动的位移,图中以c 表示电位器滑动触点的位置。
另一电位器用来给定负载运动的位移,此电位器的滑动触点的位置(图中以r 表示)即为该随动系统的参考输入。
两电位器滑动触点间的电压差e u 即是无惯性放大器(放大系数为a K )的输入,放大器向直流电动机M 供电,电枢电压为u ,电流为I 。
自动控制理论第2版(夏德钤著)课后习题答案下载夏德钤的《自动控制理论第2版》比拟全面和详细地介绍了经典控制理论的根本内容。
以下是为大家的自动控制理论第2版(夏德钤著),希望能对你有帮助!目前普通高等院校“自动控制理论(原理)”教学学时大致有三种,48学时、64学时和80学时。
自动控制理论(原理)涉及专业比拟多,教学内容以经典控制理论为主,控制对象依据专业而不同。
本书主要适用专业为:电气工程及其自动化,机械设计及其自动化,电子信息工程。
局部内容(例如控制对象方面的例题)稍加修改,也可以适应其他如建筑环境与能源应用工程专业等。
本教材是与上述的教学学时和专业相配套的教学参考书(80学时及以上的还需要略微补充一点内容),同时也可作为学生自学教材。
在编写《自动控制理论》的过程中,我们重视根底理论知识,参加拉普拉斯变换内容,从第3章开始,参加MATLAB仿真的内容。
通过细化根轨迹和频率特性绘图过程,使学生更好地掌握图形绘制,掌握自动控制系统的分析和设计方法。
在注重应用的前提下,精选教学内容和配套习题,在文字表达方面力求清晰、准确,教材内容适度。
本教材的所有编者长期工作在教学第一线,也有很强的自动控制和电气控制的实践经历,我们力求将这些经历融入本教材中。
本书第1章由赵浩老师编写,第2章和第6章由朱宁老师编写,第3章由童佳老师编写,第4章由丁立军编写,第5章由高慧敏老师编写,第7章由林立老师编写。
陈叠峰和任美华两位同学编写了局部的MATLAB章节。
由于编者水平有限、编写时间紧迫,教材中难免有缺点和错误,恳请读者批评指正,以使我们有更大的进步。
[1] 编者xx年8月第1章自动控制的根本知识1.1自动控制的开展历史和根本概念1.2自动控制的根本控制方式1.3自动控制系统的分类1.4自动控制系统的性能指标习题1第2章控制系统的数学模型2.1数学模型的根本概念2.2控制系统数学模型——微分方程2.3拉普拉斯变换与反变换2.4传递函数2.5控制系统的动态构造图、信号流图与梅逊公式习题2第3章线性系统的时域分析法3.1系统分析的根本假设条件和分析指标3.2一阶系统的时域分析3.3二阶系统的时域分析3.4高阶系统的时域响应3.5线性定常系统的稳定性3.6线性系统的稳态误差计算3.7用MATLAB辅助分析控制系统时域性能习题3第4章控制系统的根轨迹法4.1根轨迹的根本概念4.2绘制根轨迹的规那么和方法4.3广义根轨迹4.4控制系统根轨迹的性能分析4.5用MATLAB绘制根轨迹习题4第5章控制系统的频域分析法5.1频率特性的根本概念5.2对数频率特性及其绘制5.3幅相频率特性及其绘制5.4稳定判据5.5稳定裕度5.6系统的开、闭环频率特性与阶跃响应的关系5.7MATLAB在频率法中的应用习题5第6章控制系统的校正6.1控制系统校正的根本概念6.2根本控制规律和常用校正装置6.3频率校正方法6.4反应校正6.5复合控制方法6.6Simulink在控制系统仿真中的应用习题6第7章离散控制系统7.1离散控制系统根本概念7.2信号的采样与复现7.3离散控制系统的数学模型7.4离散系统分析7.5应用MATLAB进展离散系统分析习题7参考文献1.2.3.。
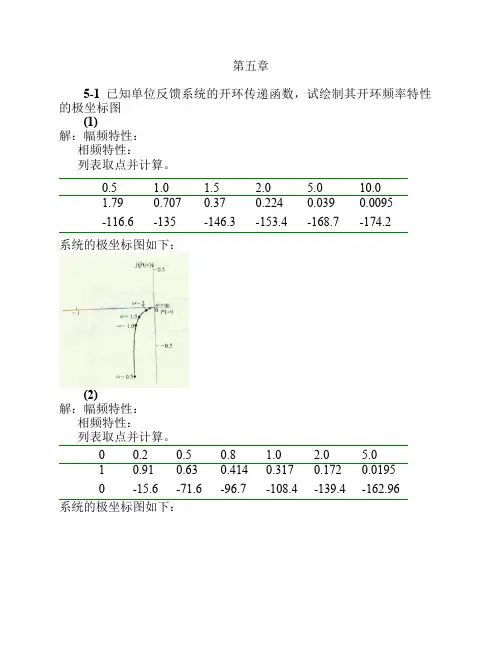
第五章5-1 已知单位反馈系统的开环传递函数,试绘制其开环频率特性的极坐标图(1)解:幅频特性:相频特性:列表取点并计算。
0.5 1.0 1.5 2.0 5.010.01.790.7070.370.2240.0390.0095-116.6-135-146.3-153.4-168.7-174.2系统的极坐标图如下:(2)解:幅频特性:相频特性:列表取点并计算。
00.20.50.8 1.0 2.0 5.010.910.630.4140.3170.1720.01950-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如下:(3)解:幅频特性:相频特性:列表取点并计算。
0.20.30.51254.55 2.74 1.270.3170.0540.0039-105.6-137.6-161-198.4-229.4-253系统的极坐标图如下:(4)解:幅频特性:相频特性:列表取点并计算。
0.20.250.30.50.60.8122.7513.87.86 2.520.530.650.317-195.6-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如下:5-2 试绘制上题中各系统的开环对数频率特性(伯德图)。
(1)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,在处与=20=0相交。
环节的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示:(2)解:伯德图起始为0dB线,的交接频率,斜率下降20dB/dec,变为-20dB/de c。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示。
(3)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,其延长线在=1处与=20=0相交。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
的交接频率,斜率下降20dB/dec,变为-60dB/de c。
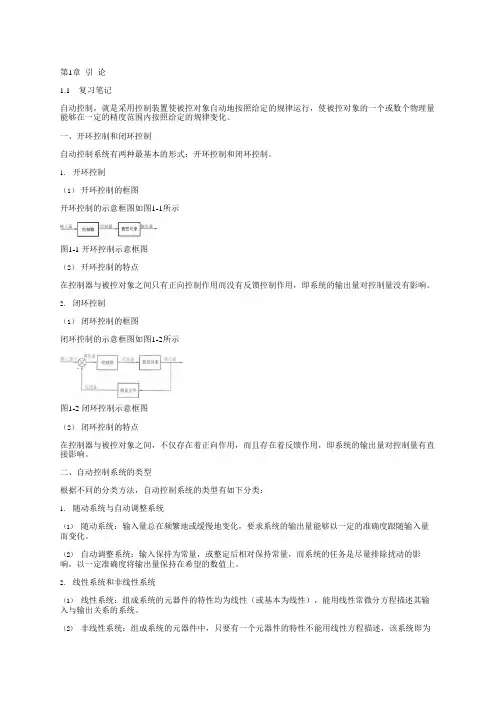
第1章引论1.1复习笔记自动控制,就是采用控制装置使被控对象自动地按照给定的规律运行,使被控对象的一个或数个物理量能够在一定的精度范围内按照给定的规律变化。
一、开环控制和闭环控制自动控制系统有两种最基本的形式:开环控制和闭环控制。
1.开环控制(1)开环控制的框图开环控制的示意框图如图1-1所示图1-1 开环控制示意框图(2)开环控制的特点在控制器与被控对象之间只有正向控制作用而没有反馈控制作用,即系统的输出量对控制量没有影响。
2.闭环控制(1)闭环控制的框图闭环控制的示意框图如图1-2所示图1-2 闭环控制示意框图(2)闭环控制的特点在控制器与被控对象之间,不仅存在着正向作用,而且存在着反馈作用,即系统的输出量对控制量有直接影响。
二、自动控制系统的类型根据不同的分类方法,自动控制系统的类型有如下分类:1.随动系统与自动调整系统(1)随动系统:输入量总在频繁地或缓慢地变化,要求系统的输出量能够以一定的准确度跟随输入量而变化。
(2)自动调整系统:输入保持为常量,或整定后相对保持常量,而系统的任务是尽量排除扰动的影响,以一定准确度将输出量保持在希望的数值上。
2.线性系统和非线性系统(1)线性系统:组成系统的元器件的特性均为线性(或基本为线性),能用线性常微分方程描述其输入与输出关系的系统。
(2)非线性系统:组成系统的元器件中,只要有一个元器件的特性不能用线性方程描述,该系统即为非线性系统。
3.连续系统与离散系统(1)连续系统:各部分的输入和输出信号都是连续函数的模拟量。
(2)离散系统:某一处或数处的信号以脉冲列或数码的形式传递的系统。
4.单输入单输出系统与多输入多输出系统(1)单输入单输出系统:其输入量和输出量各为一个,系统结构较为简单。
(2)多输入多输出系统:其输入量和输出量多于一个,系统结构较为复杂,回路多。
5.确定系统与不确定系统(1)确定系统:系统的结构和参数是确定的、已知的,系统的输入信号(包括参考输入及扰动)也是确定的,可用解析式或图表确切表示。
![自动控制原理课后答案第四版_夏德钤(主要老师布置的作业) [兼容模式] [修复的]资料](https://uimg.taocdn.com/be3bec8033d4b14e84246800.webp)

《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
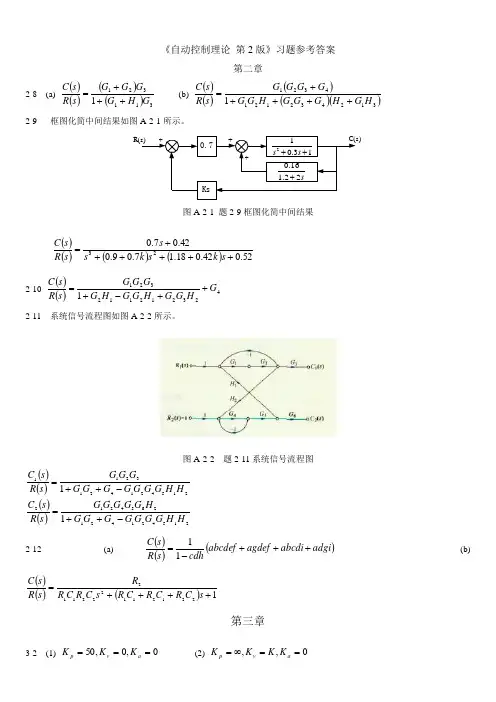
0.7C(s)++_R(s)113.02++s s s22.116.0+Ks+图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
《自动控制理论 第2版》习题参考答案第二章2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
0.7C(s)++_R(s)113.02++s s s22.116.0+Ks+图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=sk s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12(a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C 第三章3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(limlim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r ss s ,于是稳态误差级数为 ()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r ss s ,于是稳态误差级数为 ()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t r t R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-7588.19,598.0==n ωζ3-10()()()())5.0,/1(,%28%,3.162)24.0,/12.2(,%299.7%,6.461========ζωζωs rad s t Ms rad s t M n s pn s p()s ts153=)25.1,/4.0(,==ζωs rad n ,过阻尼系统,无超调。
第四章4-2设已知单位反馈系统的开环传递函数如下,要求绘出当开环增益1K 变化时系统的根轨迹图,并加简要说明。
(1)()()()311++=s s s K s G系统开环极点为0,—1,—3,无开环零点。
实轴[]01,-与[]3,∞-上有根轨迹,渐近线相角 180,60±±=a ϕ,渐近线与实轴交点33.1-=a σ,由01=dSdK 可得出分离点为)(0,45.0j -,与虚轴交点()1231=±K j 。
常规根轨迹如图A-4-2所示。
图A-4-2 题4-2系统(1)常规根轨迹(2)()()()204421+++=s s s s K s G 方法步骤同上,实轴(]04,-上有根轨迹, 135,45±±=a ϕ,2-=a σ,分离点()()5.220,2j j ±--与,与虚轴交点()260101=±K j。
常规根轨迹如图A-4-3所示。
图A-4-3 题4-2系统(2)常规根轨迹4-3设单位反馈系统的开环传递函数为)1()(21+=s s K s G (1)试绘制系统根轨迹的大致图形,并对系统的稳定性进行分析。
(2)若增加一个零点1-=z ,试问根轨迹图有何变化,对系统稳定性有何影响? (1)()()221+=s s K s G实轴[]2-∞-,上有根轨迹,67.0,60-=±=a a σϕ ,由01=dSdK 可得出分离点为()0,0j ,与虚轴交点为0j ()01=K 常规根轨迹如图A-4-4(a )所示。
从根轨迹图可见,当01>K 便有二个闭环极点位于右半s 平面。
所以无论K 取何值,系统都不稳定。
图A-4-4 题4-3系统常规根轨迹(2)()()()2121++=s s s K s G 实轴[]12--,上有根轨迹,5.0,90-=±=a a σϕ ,分离点为()0,0j ;常规根轨迹如图A-4-4(b )所示。
《自动控制理论 (夏德钤)》习题答案详解第二章2-1 试求图2-T-1所示RC 网络的传递函数。
(a)11111111+=+⋅=Cs R R CsR Cs R z ,22R z =,则传递函数为: 2121221212)()(R R Cs R R R Cs R R z z z s U s U i o +++=+= (b) 设流过1C 、2C 的电流分别为1I 、2I ,根据电路图列出电压方程:⎪⎪⎩⎪⎪⎨⎧=++=)(1)()]()([)(1)(2221111s I s C s U s I s I R s I sC s U o i 并且有)()1()(122211s I sC R s I s C += 联立三式可消去)(1s I 与)(2s I ,则传递函数为:1)(1111)()(222111221212211112++++=⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫ ⎝⎛++=s C R C R C R s C C R R R s C R s C s C R sC s U s U i o 2-2 假设图2-T-2的运算放大器均为理想放大器,试写出以i u 为输入,o u 为输出的传递函数。
(a)由运算放大器虚短、虚断特性可知:dtduC dt du C R u i i 0+-=,0u u u i c -=, 对上式进行拉氏变换得到)()()(0s sU s sU RCs U i i +-= 故传递函数为RCsRCs s U s U i 1)()(0+=(b)由运放虚短、虚断特性有:022=-+--R u R u u dt du Cc c i c ,0210=+R u R u c ,联立两式消去c u 得到02220101=++⋅u R u R dt du R CR i 对该式进行拉氏变换得0)(2)(2)(20101=++s U R s U R s sU R CR i 故此传递函数为)4(4)()(10+-=RCs R R s U s U i (c)02/2/110=+-+R u R u u dt du Cc c c ,且21R uR u c i -=,联立两式可消去c u 得到 0222101=++⋅Ru R u dt du R CR ii 对该式进行拉氏变换得到0)(2)(2)(2011=++⋅s U Rs U R s sU R CR i i 故此传递函数为RCs R R s U s U i 4)4()()(110+-= 2-3 试求图2-T-3中以电枢电压a u 为输入量,以电动机的转角θ为输出量的微分方程式和传递函数。
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U(b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U2-2 (a)()()RCsRCs s U s U 112+=(b) ()()141112+⋅-=Cs R RR s U s U (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 26022-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫ ⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++=(b)()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
0.7C(s)++_R(s)113.02++s s s22.116.0+Ks+图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgiabcdi agdef abcdefcdhs R s C +++-=11 (b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时 ()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt tn n nn n n ee t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫ ⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin1211cos221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t et et t c j s j s n tnnn tnn tnnnnn n n (c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nnnr s s s s R s c s R s E ωζωζω+++=-=系统对单位斜坡输入的稳态误差为 ()nnn ns sr s s s s ss im e ωζωζωζω2221222=+++⋅⋅=→3-2 (1) 0,0,50===a v pK K K(2) 0,,==∞=a v pK K K K(3) 10,,K K K Ka v p=∞=∞= (4) 0,200,==∞=a v pK K K K3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e误差系数可求得如下()()()0)101.0()12.0(20)101.0(2limlim1.0)101.0()12.0(10limlim101.0)11.0(limlim 3222220222120=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s dsd C s s s s ds d C s s s s s C se s s e s s e s (1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为())(1.0)(!2)()(21210t R R t r C t r C t r Ct e s s ssr+=++= ,0≥t3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e误差系数可求得如下()⎪⎭⎫ ⎝⎛++-=-=-t et t c s n tnn n n 21222,1ωωωωω()()()2322222022212050098)5001.0()12.0(1000)5001.0(100limlim 5001)5001.0()12.0(500limlim5001.0)11.0(limlim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s dsd C s s s s ds d C s s s s s C se s s e s s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-6 系统在单位斜坡输入下的稳态误差为 nsr e ωζ2=加入比例—微分环节后()()()()[]()()()()()()()()()()()()()()()nns sr nn n n nn na s sE im e ss R s R s s s a s s C s R s E s R s s as s R s G s G as s C s G s C as s R s C ωωζωζωωωζωζωω-===++-+=-=+++=++=-+=→21222111102222222可见取na ωζ2=,可使0=sr e3-7 588.19,598.0==n ωζ 3-8 ()()6442++=s s s s G3-9 按照条件(2)可写出系统的特征方程2)22()2())(22())(1)(1(232=+++++=+++=+++-+a s a s a s a s s s a s j s j s将上式与0)(1=+s G 比较,可得系统的开环传递函数[])22()2(2)(2a s a s s as G ++++=根据条件(1),可得aa e K srv 2225.01+===解得1=a ,于是由系统的开环传递函数为[]432)(2++=s s s s G3-10()()()())5.0,/1(,%28%,3.162)24.0,/12.2(,%299.7%,6.461========ζωζωs rad s t Ms rad s t Mn s pn s p()s ts153=)25.1,/4.0(,==ζωs rad n ,过阻尼系统,无超调。
3-11 (1)当a = 0时,22,354.0==n ωζ。
(2)n ω不变,要求7.0=ζ,求得a = 0.253-12 1. 单位脉冲响应 (a) 无零点时 ()()0,1s i n 122≥--=-t t et c n tn n ωζζωζω(b )有零点1-=z 时 ()()0,111sin 1212222≥⎪⎪⎭⎫⎝⎛--+--⋅+-=-t arctg t et c n n n tnn nn ζωωζωζζωωζωζω比较上述两种情况,可见有1-=z 零点时,单位脉冲响应的振幅较无零点时小,而且产生相移,相移角为n n arctgζωωζ--112。
2.单位阶跃响应 (a) 无零点时()()0,11sin 111222≥⎪⎪⎭⎫⎝⎛-+---=-t arctg t et c n tn ζζωζζζω (b )有零点1-=z 时 ()()0,11sin 12112222≥⎪⎪⎭⎫⎝⎛-----+-+=-t arctg t et c n n tnnn ζωζωζζωζωζω 加了1-=z 的零点之后,超调量pM和超调时间p t 都小于没有零点的情况。
3-13 系统中存在比例-积分环节()ss K 111+τ,当误差信号()0=t e 时,由于积分作用,该环节的输出保持不变,故系统输出继续增长,知道出现()0<t e 时,比例-积分环节的输出才出现减小的趋势。
因此,系统的响应必然存在超调现象。
3-14 在()t r 为常量的情况下,考虑扰动()t n 对系统的影响,可将框图重画如下()122+s s K τ()s s K 111+τ()122+s s K τ()ss K 111+τ+_N(s)C(s)图A-3-2 题3-14系统框图等效变换()()()()s N s K K s s sK s C 11121222+++=ττ根据终值定理,可求得()t n 为单位阶跃函数时,系统的稳态误差为0,()t n 为单位斜坡函数时,系统的稳态误差为11K 。
从系统的物理作用上看,因为在反馈回路中有一个积分环节,所以系统对阶跃函数的扰动稳态误差为零。