清华大学机械原理A卷
- 格式:doc
- 大小:1.27 MB
- 文档页数:15
航空航天大学2008-2009 学年第二学期期末《机械原理(A3)》考试C 卷班级______________学号 _________姓名______________成绩 _________2009年9月11日《机械原理(A3)》期末考试卷(C卷)注意事项:1、请将解答写在试卷上;2、草稿纸上的解答不作为批改试卷的依据;3、用铅笔绘图,图解法解答请保留作图过程和作图辅助线。
题目:一、机构自由度计算…………………………………………………………( 分)二、机构运动分析……………………………………………………………( 分)三、连杆机构…………………………………………………………………( 分)四、凸轮机构…………………………………………………………………( 分)五、齿轮机构…………………………………………………………………( 分)六、轮系………………………………………………………………………( 分)七、机械系统动力学…………………………………………………………( 分)一、计算图示系统的自由度。
如有复合铰链、局部自由度、虚约束应注明。
若取图中绘有箭头的构件为原动件,试判断系统能否成为机构?为什么? (本题14分)ABCDEFGHI齿轮啮合二、在图示机构中,已知原动件1以匀角速度沿逆时针方向转动,试确定:(1)1在图上标出机构的全部瞬心;(2)用瞬心法求构件3的速度V,需写出表达3式,并标出速度的方向。
(本题14分)三、设计一曲柄滑块机构。
已知曲柄长20=AB l mm ,偏心距15=e mm ,其最大压力角α=30。
试用作图法确定连杆长度BC l ,滑块的最大行程H ,并标明其极位夹角θ,求出其行程速度变化系数K 。
(本题15分)四、在图示凸轮机构中,凸轮为偏心圆盘。
当凸轮逆时针方向转动时, 试用图解法作出:(1)该凸轮的基圆;(2)该凸轮的理论廓线;(3)图示位置时凸轮机构的压力角α;(4)凸轮由图示位置转过90︒时从动件的实际位移s。
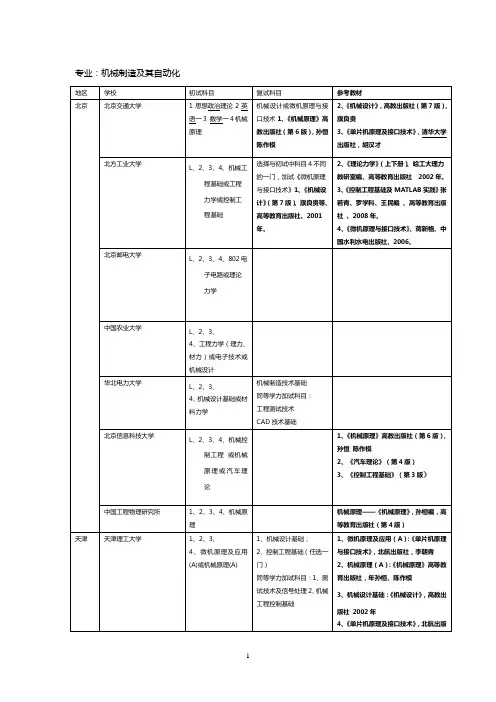
专业:机械制造及其自动化数学一:①高等数学(函数、极限、连续、一元函数微积分学、向量代数与空间解析几何、多元函数的微积分学、无穷级数、常微分方程);②线性代数(行列式、矩阵、向量、线性方程组、矩阵的特征值和特征向量、二次型);③概率论与数理统计(随机事件和概率、随机变量及其概率分布、二维随机变量及其概率分布、随机变量的数字特征、大数定律和中心极限定理、数理统计的基本概念、参数估计、假设检验)。
数学二:①高等数学(函数、极限、连续、一元函数微积分学、常微分方程);②线性代数(行列式、矩阵、向量、线性方程组、矩阵的特征值和特征向量)。
数学参考教材:《高等数学》第六版(最新的额),同济大学、《线性代数》,同济大学、《概率论与数理统计》浙大第四版的推荐复习参考:《复习全书》,李永乐。
建议做三遍,然后就是历年真题了。
英语:1、用考研英语真题考研1号《考研真相》——专为英语基础一般或薄弱者编著(配MP3和25年真题),尤其对词汇及词组搭配的系统注释,是目前真题总结最全的一本,另外对长难句进行图示解析,并配有文字说明,让大家一目了然,简洁易懂,超级实用。
2、考研英语写作《写作160篇》作者: 王建华王林出版社: 西北大学出版社出版日期: 2010-2 价格:¥29.90元这本书是这几年才冒出来的,因为几年来都有押准真题的事情发生,所以这年名声大噪,这是推荐其的一个理由,另外由于此书选题全面,基本包括各种型式的写作话题,而且打破了所谓写作模板的定式,所以很值得大家买入学习,。
3、《阅读基础90篇》——适合英语水平低于49分者使用,90篇贯通考纲所有词汇,专章讲解长难句,作者王建华张磊。
4、《考研英语词汇词根+联想记忆法》作者:俞敏洪出版社:群言出版社出版日期:2009年价格:¥36.00元这个我想不用多说吧,当然也有人说星火的更好,但星火的量太大了,毕竟大家更多的只是为了考上研,“学不在多,够用则行。
”而不是真的要求英语水平达到怎样怎样哈。

一、选择题:1.3001:把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ ,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为(A) π (B) π/2 (C) 0 (D) θ [ ]2.3002:两个质点各自作简谐振动,它们的振幅相同、周期相同。
第一个质点的振动方程为x 1 = A cos(ωt + α)。
当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二个质点正在最大正位移处。
则第二个质点的振动方程为:(A)(B) (C)(D) [ ]3.3007:一质量为m 的物体挂在劲度系数为k 的轻弹簧下面,振动角频率为ω。
若把此弹簧分割成二等份,将物体m 挂在分割后的一根弹簧上,则振动角频率是(A) 2 ω (B) (C) (D) ω /2 [ ]4.3396:一质点作简谐振动。
其运动速度与时间的曲线如图所示。
若质点的振动规律用余弦函数描述,则其初相应为 (A) π/6 (B) 5π/6 (C) -5π/6 (D) -π/6 (E) -2π/3 [ ]5.3552:一个弹簧振子和一个单摆(只考虑小幅度摆动),在地面上的固有振动周期分别为T 1和T 2。
将它们拿到月球上去,相应的周期分别为和。
则有 (A) 且 (B) 且(C) 且 (D) 且[ ]6.5178:一质点沿x 轴作简谐振动,振动方程为(SI)。
从t = 0时刻起,到质点位置在x = -2 cm 处,且向x 轴正方向运动的最短时间间隔为(A) (B) (C) (D) (E) [ ]7.5179:一弹簧振子,重物的质量为m ,弹簧的劲度系数为k ,该振子作振幅为A 的简谐振动。
当重物通过平衡位置且向规定的正方向运动时,开始计时。
则其振动方程为:(A)(B) (C)(D) (E) [ ]8.5312:一质点在x 轴上作简谐振动,振辐A = 4 cm ,周期T = 2 s ,其平衡位置取作坐标原点。

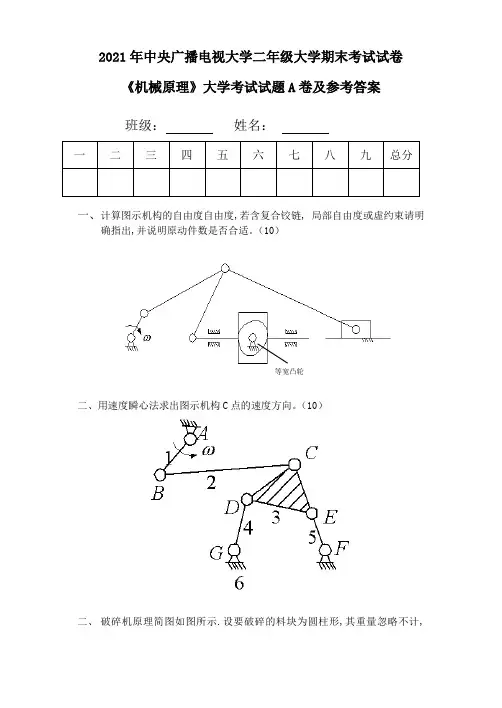
2021年中央广播电视大学二年级大学期末考试试卷《机械原理》大学考试试题A卷及参考答案班级:姓名:一二三四五六七八九总分一、计算图示机构的自由度自由度,若含复合铰链,局部自由度或虚约束请明确指出,并说明原动件数是否合适。
(10)等宽凸轮二、用速度瞬心法求出图示机构C点的速度方向。
(10)二、破碎机原理简图如图所示.设要破碎的料块为圆柱形,其重量忽略不计,料块和动鄂板之间的摩擦系数是f,求料块被夹紧又不会向上滑脱时鄂板夹角α应多大?。
(10)四、图示凸轮机构中, 凸轮廓线为圆形,几何中心在B点.请标出:(10)1)凸轮的理论廓线;2)凸轮的基圆;3)凸轮机构的偏距圆;4)凸轮与从动件在D点接触时的压力角;5)凸轮与从动件从在C接触到在D点接触时凸轮转过的角度。
o CDB五、图中给出了一对齿轮的齿顶圆和基圆,轮1为主动轮且实际中心距大于标准中心距,试在此图上画出齿轮的啮合线,并标出:极限啮合点、,实际啮合的开始点和终止点、,啮合角,节圆并说明两轮的节圆是否与各自的分度圆重合。
(10)1o 2o 1b r 2b r 1a r 2a r 1ω2ωa '六、在如图所示轮中,已知各轮齿数及齿轮1Z 的角速度1ω,求齿轮1Z 与系杆H 的传动比11?H Hi ωω==(12)七、现有一薄壁转盘其质量为m,经静平衡试验测定其质心偏距为r,方向如图所示垂直向下,由于该回转平面上不允许安装平衡质量,只能在平面I和II上进行调整,试求在平衡基面I和II上的平衡质径积[mr]及其方向。
(10)八、已知机组在稳定运转时期的等效阻力矩的变化曲线M r-ϕ如图所示,等效ω=10rad/s . 为了减小主驱动力矩为常数M d=19.6 N.m ,主轴的平均角速度m轴的速度波动,现装一个飞轮,飞轮的转动惯量J F=9.8kg.m2 ,(主轴本身的等效转动惯量不计),试求,运转不均匀系数δ。
(10)九、回答下列问题:(18)1、机构组成原理是什么?2、铰链四杆机构的基本形式有哪几种?3、凸轮从动件运动规律中,何谓“刚性冲击”和“柔性冲击”?4、何谓齿轮的“根切现象”?它是怎么产生的?有何危害?5、一对啮合的标准齿轮,如果不按标准中心距安装时,啮合角和压力角有什么关系?节圆和分度圆有什么关系?6、什么样的转子只需进行静平衡?什么样的转子必须进行动平衡? 根切现象”?它是怎么产生的?有何危害?5、一对啮合的标准齿轮,如果不按标准中心距安装时,啮合角和压力角有什么关系?节圆和分度圆有什么关系?6、什么样的转子只需进行静平衡?什么样的转子必须进行动平衡?答案与解析一、计算图示机构的自由度自由度,若含复合铰链, 局部自由度或虚约束请明确指出,并说明原动件数是否合适。
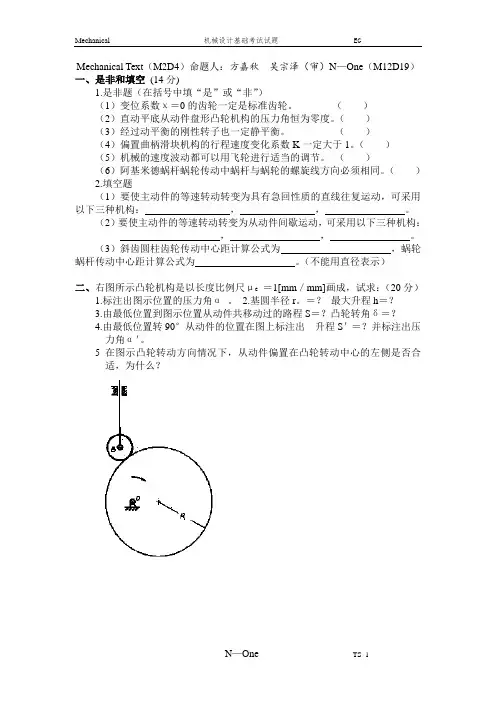
Mechanical Text(M2D4)命题人:方嘉秋吴宗泽(审)N—One(M12D19)一、是非和填空(14分)1.是非题(在括号中填“是”或“非”)(1)变位系数χ=0的齿轮一定是标准齿轮。
()(2)直动平底从动件盘形凸轮机构的压力角恒为零度。
()(3)经过动平衡的刚性转子也一定静平衡。
()(4)偏置曲柄滑块机构的行程速度变化系数K一定大于1。
()(5)机械的速度波动都可以用飞轮进行适当的调节。
()(6)阿基米德蜗杆蜗轮传动中蜗杆与蜗轮的螺旋线方向必须相同。
()2.填空题(1)要使主动件的等速转动转变为具有急回性质的直线往复运动,可采用以下三种机构:,,。
(2)要使主动件的等速转动转变为从动件间歇运动,可采用以下三种机构:,,。
(3)斜齿圆柱齿轮传动中心距计算公式为,蜗轮蜗杆传动中心距计算公式为。
(不能用直径表示)二、右图所示凸轮机构是以长度比例尺μe=1[mm/mm]画成,试求:(20分)1.标注出图示位置的压力角α。
2.基圆半径r。
=?最大升程h=?3.由最低位置到图示位置从动件共移动过的路程S=?凸轮转角δ=?4.由最低位置转90°从动件的位置在图上标注出升程S'=?并标注出压力角α'。
5在图示凸轮转动方向情况下,从动件偏置在凸轮转动中心的左侧是否合适,为什么?三、右图所示轮系中各轮齿数分别为:Z1 =17,Z2 =34,Z3=100,Z4 =80,Z5 =30,Z6 =30。
若Z1齿轮每分钟10转以箭头指向转动,试求:(8分)1.齿轮Z4的转速及转动方向;2.齿轮Z6的转速及转动方向。
四、右图所示机构运动简图是以长度比例尺μe=10[mm/mm]画成,其中L AB =L DE=200,L BC=300mm,构件1和构件4均以等角速度ω1=ω4=1rad/s 转动,转动方向分别如图中箭头所示,试求:(8分)1.构件2和构件3上C点的速度Vc2=?Vc3=?2.构件2和构件3的角速度ω2及ω3的大小及方向。
四川大学期末考试试题(闭卷)(2017——2018学年第 1 学期) A卷课程号:302074030 课序号:1~6 课程名称:机械原理任课教师:马咏梅、高山、梁尚明适用专业年级:机制、高分子、化工2016级学生人数:印题份数:学号:姓名:成绩:考生承诺我已认真阅读并知晓《四川大学考场规则》和《四川大学本科学生考试违纪作弊处分规定(修订)》,郑重承诺:1、已按要求将考试禁止携带的文具用品或与考试有关的物品放置在指定地点;2、不带手机进入考场;3、考试期间遵守以上两项规定,若有违规行为,同意按照有关条款接受处理。
考生签名:一、选择题(每小题1分,共10分)1. ()具有以下特征:①是一种人为的实物组合;②各运动单元间具有确定的相对运动;③能完成有用的机械功或转换机械能。
A.构件B.机器C.机构D.运动副2. 齿轮压力角是在不考虑摩擦情况下,作用力与作用点的()方向上的夹角。
A.法线B.切线C.加速度D. 速度3. 有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于()。
A. 0B. 1C. 2D. 34. 若在两构件的相对速度瞬心处,瞬时重合点间的速度应有()。
A.两点间相对速度为零,但两点绝对速度不等于零;B.两点间相对速度不等于零,但其中一点的绝对速度等于零;C.两点间相对速度不等于零且两点的绝对速度也不等于零;D.两点间的相对速度和绝对速度都等于零5. 要将一个曲柄摇杆机构转化成为双摇杆机构,可将( )。
A.原机构的曲柄作机架;B.原机构的连杆作机架;C.原机构的摇杆作机架6. 渐开线齿轮采用齿条型刀具加工时,刀具向轮坯中心靠近,是采用( )。
第1页,共8页A.正变位;B.负变位;C.零变位7. 齿轮渐开线在( )上的压力角,曲率半径最小。
A.根圆;B. 齿顶圆;C.分度圆;D. 基圆8. 对于存在周期性速度波动的机器,安飞轮主要是为了在()阶段进行速度调节。

汇报人:日期:•绪论•机构的结构分析•机构的运动分析•机构的力分析•机械效率与自锁•常用机构及其设计•机械系统的动力学设计•机械系统的运动控制目录绪论机械原理的研究对象030201机械原理课程的重要性基础理论设计与制造创新能力培养机械原理的发展历程古代机械文明18世纪工业革命后,机器逐渐取代了手工劳动,机械原理得到了广泛应用和发展。
工业革命现代发展机构的结构分析机构的组成机构的特点机构的组成及特点机构的分类机构可根据其结构分为连杆机构、凸轮机构、齿轮机构等。
结构分类详解每种机构的分类都有其特定的结构特点和使用范围。
机构的结构分类机构的结构组成要素机构的组成要素机构的组成要素包括构件、运动副和运动链等。
结构组成要素详解每个组成要素都有其特定的含义和作用,对机构的运动和受力性能有着重要影响。
机构的运动分析机构运动的基本概念解析法通过对机构进行数学建模,利用数值计算方法求解机构中各点的位置、速度和加速度等运动参数。
仿真的应用利用计算机仿真软件对机构进行模拟,可视化机构运动过程,方便快捷地分析机构的运动特性。
矢量图解法法分析机构中各构件之间的相对位置关系和运动特性。
1 2 3基于牛顿第二定律,分析机构中各构件之间的作用力和反作用力,以及它们之间的加速度和速度等运动参数。
牛顿力学法分别用于分析机构在运动过程中质量和力对时间和空间的积累效应,导出机构的运动微分方程。
动量定理和动量矩定理用于分析机构在运动过程中能量的转换与守恒关系,以及机构的功率和效率等性能指标。
能量守恒机构的力分析机构力分析的基本概念机构力分析的基本方法平衡状态下的力分析运动状态下的力分析动力学分析03惯性力分析机构力分析的特殊问题01摩擦力分析02重力分析机械效率与自锁机械效率是指机械在单位时间内输出功率与输入功率的比值。
定义机械效率可以通过测量机械输出端和输入端的功率,然后求比值得到。
计算方法机械效率受到多种因素的影响,如摩擦、构件之间的间隙、润滑状况等。
Word-可编辑
2023年年硕士研究生招生入学考试试题(A卷)
考试科目代码:811 考试科目名称:机械原理
考生答题须知
1.所有题目(包括填空、挑选、图表等类型题目)答题答案必须做在考点发给的答题纸上,做在本试题册上无效。
请考生必须在答题纸上写清题号。
2.评卷时不评阅本试题册,答题如有做在本试题册上而影响成绩的,后果由考生自己负责。
3.答题时一律使用蓝、黑色墨水笔或圆珠笔作答(画图可用铅笔),用其它笔答题不给分。
4.答题时不准使用涂改液等具有显然标记的涂改用品。
千里之行,始于足下
朽木易折,金石可镂
千里之行,始于足下
朽木易折,金石可镂
昆明理工大学2023年年硕士研究生招生入学考试试题
千里之行,始于足下
,从动件的偏距为,试用作图法:画出该机构的凸轮理论廓线、基圆及基圆半径;
朽木易折,金石可镂。
2023机械原理试卷及答案2023机械原理试卷及答案(一)一、(10分)选择题:1、构件是机构中的单元。
A、运动;B、制造;C、应用2、基本杆组是一自由度的运动链。
A、F1B、 03、以摇杆为主动件的曲柄摇杆机构死点位置。
A 、有一个; B、有二个 ; C、没有4、平底从动杆盘形凸轮机构,其压力角。
A 、为常数; B、随凸轮转动而变化; C、一定比尖顶推杆的大5、一对外啮合渐开线斜齿圆柱齿轮,其螺旋角应满足。
A、大小相等、旋向相同;B、大小不等、旋向相同;C、大小相等、旋向相反6、渐开线齿轮上处的圆称为分度圆。
A、齿厚等于齿槽宽;B、齿顶高等于齿根高C、具有标准模数和标准压力角。
7、六个构件组成的平面机构,其瞬心总数应为个。
A、15;B、30;C、128、若要传递两平行轴之间的运动,且要求两轴转向相同,宜采用。
A、外啮合齿轮传动;B、内啮合齿轮传动;C、齿轮齿条传动9、为了减小机械运转中速度的波动,应在机械中安装飞轮。
A、所有;B、周期性;C、非周期性10、在研究机械系统动力学问题时,常采用等效力(或力矩)来代替作用在系统中的所有外力,它是按的原则确定的。
A、做功相等;B、动能相等; 目C、力的平衡二、(10分)计算下图所示平面机构的自由度,若存在复合铰链、局部自由度及虚约束请明确指出,并判断该机构是否具有确定的相对运动。
三、(10分)图示为一对心直动尖顶从动杆盘形凸轮机构。
已知凸轮以等角速度ω顺时针方向转动。
试:在图上画出凸轮的基圆,并标明基圆半径r0,;在图中标明从动杆的行程h;在图中标出凸轮的推程运动角δ0、远休止角δ01、回程运动角δ0′和近休止角δ02; 标出凸轮机构图示位置的压力角α;若凸轮按图示方向转过45°,标出其压力角α45°。
四、(13分)下图所示机构中,设已知各构件的尺寸,原动件1以等角速度逆时针方向转动。
试:1)用矢量方程图解法求图示位置时构件3的速度。
清华大学本科生考试试题用纸 A 卷考试课程 《运动学》 年 月 日班级 姓名 学号 成绩一、 填空题(请将答案填入划线内,每空3分)(1) 刚体作平面运动时,若改变基点,则下面第 个结论是正确的。
① 刚体内任一点的牵连速度、相对速度、绝对速度都会改变; ② 刚体内任一点的牵连速度、相对速度都会改变,而绝对速度不会改变; ③ 刚体内任一点的牵连速度会改变,而相对速度、绝对速度不会改变; ④ 刚体内任一点的牵连速度、相对速度、绝对速度都不会改变。
(2) 点在运动过程中,在下列条件下,各作何种运动?(设t a 为切向加速度大小,n a 为法向加速度大小)①t a ≡0,n a ≡0;答: ; ②t a ≠0,n a ≡0;答: ; ③t a ≡0,n a ≠0;答: ; ④t a ≠0,n a ≠0。
答: 。
(3) 弯杆OABD 以匀角速度1ω绕轴O 转动,圆盘又以匀角速度2ω绕轴D 相对弯杆转动。
在图示瞬时OD 连线为水平,圆盘边缘上的E 点与D 点的连线为铅垂。
若以弯杆为动系,E 为动点,则E 点的牵连速度大小e =v ,科氏加速度大小=c a , 并将e v 和c a 的方向在图上标出。
二、 计算题(本题20分)图示机构中,ABD 为一刚性直杆,A 、B 、D 处均为铰链,且12O O AB =,12O A O B r ==,套筒D 相对摇杆3O E 滑动,已知曲柄1O A 的转动方程为sin 43t πθ=(弧度),t 以秒计。
当24π=t 秒时,摇杆转过的角度为30ϕ=,3O 至ABD,求该瞬时摇杆3O E 的角速度及角加速度。
2第一(3)题图E三、计算题(25分)图示平面机构中,铅垂滑道中的滑块F 以匀速v 下滑,二连杆EF 与BE 带动齿轮A 沿固定齿轮O 作纯滚动,二轮半径均为R ,BE 杆在中点与水平滑道中的滑块D铰接,2,BD DE R EF ===,机构运动到图示位置时,O 、A 、B 处于同一铅垂线上,R DF 2=,求此瞬时:(1) 轮A 中心的速度A v , 各刚体的角速度A ω、BE ω、EF ω; (2) 轮A 中心的加速度A a , 各刚体的角加速度A ε、BE ε、EF ε。
北交机械原理期中期末考试题一、选择题(共30题,每题2分,共60分)1. 下列选项中,能够描述机械原理的是:A. 牛顿第一定律B. 阿基米德原理C. 热力学第一定律D. 法拉第电磁感应定律2. 以下关于力的描述中,错误的是:A. 力是物体受到的作用,具有大小和方向B. 力可以改变物体的运动状态C. 重力是一种力的形式D. 力只存在于机械系统中3. 牛顿第二定律公式 F = ma 中,F 表示:A. 物体的加速度B. 物体所受到的合力的大小C. 物体的质量D. 物体的速度4. 如果一个物体静止不动,则可以得出以下结论:A. 物体上没有合力作用B. 物体的质量为零C. 物体所受到的合力平衡D. 物体的速度为零5. 当作用在一个物体上的合力为零时,可以推断该物体的状态是:A. 静止不动B. 从静止开始运动C. 匀速直线运动D. 加速运动6. 以下哪个物理量不是标量?A. 力B. 加速度C. 质量D. 速度7. 斜面上放置一物体,以下哪个物体所受到的摩擦力最大?A. 高度较低的斜面B. 高度较高的斜面C. 斜面倾角较大的位置D. 斜面倾角较小的位置8. 阿基米德原理适用于描述以下哪种现象?A. 物体的加速度与所受力成正比B. 物体的运动状态保持恒定C. 物体在液体中所受到的浮力D. 物体受到的空气阻力9. 假设一个速度为10m/s的车以恒定速度行驶,那么该车所受到的合力为:A. 0 NB. 10 NC. 不确定,因为未知质量D. 不确定,因为未知加速度10. 帕斯卡定律适用于以下哪种情况?A. 流体中压强随深度而变化B. 流体静止时的压强分布C. 流体受到的压强与体积的关系D. 流体在运动过程中的能量转化二、填空题(共10题,每题4分,共40分)1. 牛顿第三定律指出,作用力与反作用力的大小相等,方向________。
2. 受力分析在机械原理中起着重要的作用,根据牛顿第二定律,加速度与所受合力方向________。
清华大学机械原理A 卷1. 凡是驱动机械产生运动的力统称为 力,其特征是该力与其作用点的速度方向 或成 ,其所作的功为 。
A .驱动;B .平衡;C .阻抗;D .消耗功;E .正功;F .相同;G .相反;H .锐角;I .钝角;J .负功 答:AFHE2. 简述进行质量代换需要满足的三个条件?动代换和静代换各应满足什么条件? 答:质量代换法需满足三个条件:1、 代换前后构件的质量不变;2、 代换前后构件的质心位置不变;3、 代换前后构件对质心轴的转动惯量不变;其中:动代换需要满足前面三个条件;静代换满足前两个条件便可。
3. 什么是当量摩擦系数?分述几种情况下的当量摩擦系数数值。
答:为了计算摩擦力简便,把运动副元素几何形状(接触面形状)对运动副的摩擦力的影响因素计入到摩擦系数中,这种转化后的摩擦系数称为当量摩擦系数。
对单一平面 f f V =;槽角为θ2时θsin ff v =;半圆柱面接触时kf f V =,2/~1π=k4.移动副中总反力的方位如何确定?答:1)总反力与法向反力偏斜一摩擦角2)总反力的偏斜方向与相对运动方向相反。
5. 移动副的自锁条件是 驱动力作用在移动副的摩擦角内 。
6. 转动副的自锁条件是 驱动力臂≤摩擦圆半径 。
7. 判定机械自锁的条件有哪些?答:1)驱动力位于摩擦锥或摩擦圆内; 2)机械效率小于或等于03)能克服的工作阻力小于或等于08.判断对错,在括号中打上 √ 或 ×:在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。
(√ )分析与计算:1.图示为一曲柄滑块机构的a)、b)、c)三个位置,F为作用在活塞上的力,转动副A及B上所画的虚线小圆为摩擦圆,试决定在此三个位置时作用在连杆AB 上的作用力的真实方向(构件重量及惯性力略去不计)。
2. 图示为一摆动推杆盘形凸轮机构,凸轮1沿逆时针方向回转,F为作用在推杆2上的外载荷,试确定各运动副中总反力(F R31、F R12及F R32)的方位(不考虑构件的重量及惯性力,图中虚线小圆为摩擦圆,运动副B处摩擦角φ如图所示)。
3. 图示为一带式运输机,由电动机1经带传动及一个两级齿轮减速器,带动运输带8。
设已知运输带8所需的曳引力P=5500N,运送速度u=1.2m/s。
带传动(包括轴承)的效率η1=0.95,每对齿轮(包括其轴承)的效率η2=0.97,运输带8的机械效率η3=0.9。
试求该系统的总效率及电动机所需的功率。
解:该系统的总效率为822.092.097.095.023221=⨯⨯==ηηηη电动机所需的功率为)(029.8822.0102.155003kw v P N =⨯⨯=⋅=-η4.如图所示为一输送辊道的传动简图。
设已知一对圆柱齿轮传动的效率为0.95;一对圆锥齿轮传动的效率为0.92 (均已包括轴承效率)。
求该传动装置的总效率。
解:此传动装置为一混联系统。
圆柱齿轮1、2、3、4为串联圆锥齿轮5-6、7-8、9-10、11-12为并联。
此传动装置的总效率5.图示为由几种机构组成的机器传动简图。
已知:η1=η2=0.98,η3=η4=0.96,η5=η6=0.94,η7=0.42,P r ’=5KW ,P r ’’=0.2KW 。
求机器的总效率η。
解:设机构3、4、5、6、7 组成的效率为η3’,则机器的总效率为η=η1η2η3’而''2'2''''3P P P P r r ++=η, P 2’ η3η4= P r ’ ,P 2’’ η5η6η7= P r ’’将已知代入上式可得总效率η=η1η2η3’=0.8375 6 1 23 4 7 η1η2η5η6η7η3η4P r ’P r ’’2341295.0'==ηηη92.0''56==ηη83.092.095.0'''2563412=⋅==⋅=ηηηηηηLF100126. 如图所示,构件1为一凸轮机构的推杆,它在力F 的作用下,沿导轨2向上运动,设两者的摩擦因数f=0.2,为了避免发生自锁,导轨的长度L 应满足什么条件(解题时不计构件1的质量)?解:力矩平衡0=∑M 可得:L R F ⨯=⨯100, 得:L F R /100⨯= ,其中21R R R == R 正压力产生的磨擦力为:L F f R F f /1002.0⨯⨯=⋅= 要使推杆不自锁,即能够上升,必须满足:f F F 2>,即L F F /1002.02⨯⨯⨯>解得:mm L 401004.0=⨯>7. 图示为一焊接用的楔形夹具,利用这个夹具把两块要焊接的工件1及1’预先夹妥,以便焊接。
图中2为夹具体,3为楔块,试确定此夹具的自锁条件(即当夹紧后,楔块3不会自动松脱出来的条件)。
解:此题是判断机构的自锁条件,因为该机构简单,故可选用多种方法进行求解。
解法一:根据反行程时0≤'η的条件来确定。
反行程时(楔块3退出)取楔块3为分离体,其受工件1、1′和夹具2作用的总反力F R13和F R23以及支持力F ′。
各力方向如图5-5(a )、(b)所示 ,根据楔块3的平衡条件,作力矢量三角形如图5-5(c )所示 。
由正弦定理可得()φαφ2sin cos 23-'=F F R 当0=φ时,αsin 230F F R '=213F R23F R13F'v 31αφφF R23F R13F'αφφF R23F'F R13图5-5(a)(b)(c)α-2φ90°+φ于是此机构反行程的效率为 ()αφαηsin 2sin 32320-=='R R F F 令0≤'η,可得自锁条件为:φα2≤ 。
解法二:根据反行程时生产阻力小于或等于零的条件来确定。
R 1 F R 2F f根据楔块3的力矢量三角形如图5-5(c ),由正弦定理可得()φφαcos 2sin 23-='R F F 若楔块不自动松脱,则应使0≤'F 即得自锁条件为:φα2≤ 解法三:根据运动副的自锁条件来确定。
由于工件被夹紧后F ′力就被撤消,故楔块3的受力如图5-5(b)所示,楔块3就如同受到F R23(此时为驱动力)作用而沿水平面移动的滑块。
故只要F R23作用在摩擦角φ之内,楔块3即发生自锁。
即 φφα≤- ,由此可得自锁条件为:φα2≤ 。
讨论:本题的关键是要弄清反行程时F R23为驱动力。
用三种方法来解,可以了解求解这类问题的不同途径。
8. 图示楔块机构。
已知:αβ==60o,各摩擦面间的摩擦系数均为f =015.,阻力Q =1000N 。
试:①画出各运动副的总反力; ②画出力矢量多边形;③求出驱动力P 值及该机构效率。
153077.8==-f tg ϕ由正弦定理:)90sin()2180sin(0210ϕβγϕ-=--+R P 和)90sin()2sin(012ϕϕβ+=-R Q于是QP *-+*---+=)2sin()90sin()90sin()2180sin(00ϕβϕϕβγϕ代入各值得:N P 7007.1430=取上式中的00=ϕ,可得N P 10000=于是6990.00==P P η第6章机械的平衡概念:1. 在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
答:质径积2. 刚性转子的动平衡的条件是。
答:偏心质量产生的惯性力和惯性力矩矢量和为03.转子静平衡和动平衡的力学条件有什么异同?答:静平衡:偏心质量产生的惯性力平衡动平衡:偏心质量产生的惯性力和惯性力矩同时平衡4.造成转子不平衡的原因是什么?平衡的目的又是什么?答:原因:转子质心与其回转中心存在偏距;平衡目的:使构件的不平衡惯性力和惯性力矩平衡以消除或减小其不良影响。
5.造成转子动不平衡的原因是什么?如何平衡?答:转子的偏心质量产生的惯性力和惯性力偶矩不平衡;平衡方法:增加或减小配重使转子偏心质量产生的惯性力和惯性力偶矩同时得以平衡。
6. 回转构件进行动平衡时,应在两个平衡基面上加平衡质量。
7. 质量分布在同一平面内的回转体,经静平衡后_______________(一定、不一定、一定不)满足动平衡,经动平衡后___________(一定、不一定、一定不)满足静平衡;质量分布于不同平回转面内的回转体,经静平衡后____________(一定、不一定、一定不)满足动平衡,经动平衡后____________(一定、不一定、一定不)满足静平衡。
答:一定一定不一定一定8. 机构的完全平衡是使机构的总惯性力恒为零,为此需使机构的质心恒固定不动。
9. 平面机构的平衡问题中,对“动不平衡”描述正确的是 B 。
A只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B动不平衡只有在转子运转的情况下才能表现出来C静不平衡针对轴尺寸较小的转子(转子轴向宽度b与其直径D之比b/D<0.2)D使动不平衡转子的质心与回转轴心重合可实现平衡10.平面机构的平衡问题,主要是讨论机构惯性力和惯性力矩对 的平衡。
A. 曲柄 B. 连杆 C. 机座 答:C11.判断对错,在括号中打上 √ 或 ×:①经过动平衡校正的刚性转子,任一回转面内仍可能存在偏心质量。
( √ )②若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。
( √ )③设计形体不对称的回转构件,虽已进行精确的平衡计算,但在制造过程中仍需安排平衡校正工序。
( √ ) ④不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
( × )⑤通常提到连杆机构惯性力平衡是指使连杆机构与机架相联接的各个运动副内动反力全为零,从而减小或消除机架的振动。
( × ) ⑥作往复运动或平面复合运动的构件可以采用附加平衡质量的方法使它的惯性力在构件内部得到平衡。
( √ ) ⑦若机构中存在作往复运动或平面复合运动的构件,则不论如何调整质量分布仍不可能消除运动副中的动压力。
( √ )⑧绕定轴摆动且质心与摆动轴线不重合的构件,可在其上加减平衡质量来达到惯性力系平衡的目的。
( √ )⑨为了完全平衡四杆铰链机构ABCD 的总惯性力,可以采用在原机构上附加另一四杆铰链机构AB ’C ’D 来达到。
条件是l AB =l AB ’,l BC =l BC ’l CD =l CD ’,各杆件质量分布和大小相同。
( × ) ⑩为了完全平衡四杆铰链机构的总惯性力,可以采用在AB 杆和CD 杆上各自加上平衡质量m '和m ''来达到。