2.3闭环控制系统动态结构图
- 格式:ppt
- 大小:2.40 MB
- 文档页数:43

第2章 转速、电流双闭环直流调速系统和调节器的工程设计方法2.1 转速、电流双闭环直流调速系统及其静特性采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。
电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。
在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形示于图2-1b 。
为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。
应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。
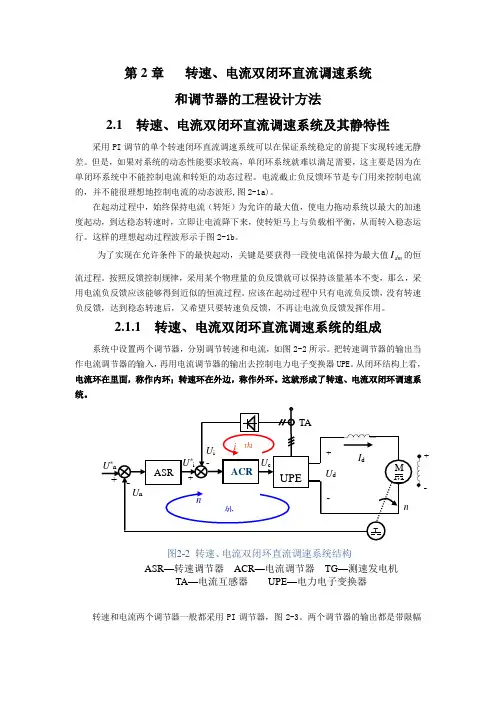
2.1.1 转速、电流双闭环直流调速系统的组成系统中设置两个调节器,分别调节转速和电流,如图2-2所示。
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
转速和电流两个调节器一般都采用PI 调节器,图2-3。
两个调节器的输出都是带限幅+TG nASRACRU*n+ -U nU iU*i+-U cTAM+-U dI dUPE-MT图2-2 转速、电流双闭环直流调速系统结构ASR —转速调节器 ACR —电流调节器 TG —测速发电机TA —电流互感器 UPE —电力电子变换器内外ni2作用的,转速调节器ASR 的输出限幅电压*im U 决定了电流给定电压的最大值,电流调节器ACR 的输出限幅电压cm U 限制了电力电子变换器的最大输出电压dm U 。
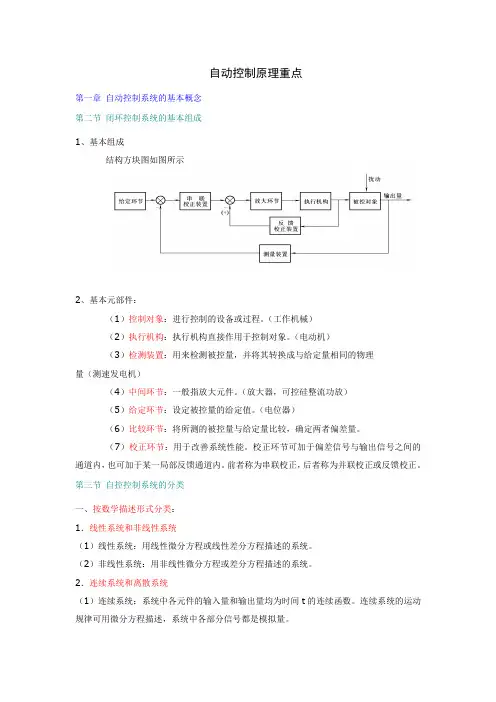
自动控制原理重点第一章自动控制系统的基本概念第二节闭环控制系统的基本组成1、基本组成结构方块图如图所示2、基本元部件:(1)控制对象:进行控制的设备或过程。
(工作机械)(2)执行机构:执行机构直接作用于控制对象。
(电动机)(3)检测装置:用来检测被控量,并将其转换成与给定量相同的物理量(测速发电机)(4)中间环节:一般指放大元件。
(放大器,可控硅整流功放)(5)给定环节:设定被控量的给定值。
(电位器)(6)比较环节:将所测的被控量与给定量比较,确定两者偏差量。
(7)校正环节:用于改善系统性能。
校正环节可加于偏差信号与输出信号之间的通道内,也可加于某一局部反馈通道内。
前者称为串联校正,后者称为并联校正或反馈校正。
第三节自控控制系统的分类一、按数学描述形式分类:1.线性系统和非线性系统(1)线性系统:用线性微分方程或线性差分方程描述的系统。
(2)非线性系统:用非线性微分方程或差分方程描述的系统。
2.连续系统和离散系统(1)连续系统:系统中各元件的输入量和输出量均为时间t的连续函数。
连续系统的运动规律可用微分方程描述,系统中各部分信号都是模拟量。
(2)离散系统:系统中某一处或几处的信号是以脉冲系列或数码的形式传递的系统。
离散系统的运动规律可以用差分方程来描述。
计算机控制系统就是典型的离散系统。
二、按给定信号分类(1)恒值控制系统:给定值不变,要求系统输出量以一定的精度接近给定希望值的系统。
如生产过程中的温度、压力、流量、液位高度、电动机转速等自动控制系统属于恒值系统。
(2)随动控制系统:给定值按未知时间函数变化,要求输出跟随给定值的变化。
如跟随卫星的雷达天线系统。
(3)程序控制系统:给定值按一定时间函数变化。
如程控机床。
第四节对控制系统的基本要求对控制系统的基本要求归纳为稳定性、动态特性和稳态特性三个方面1、系统的暂态过程2、稳定性3、动态特性4、稳态特性值得注意的是,对于同一个系统体现稳定性、动态特性和稳态特性的稳、快、准这三个要求是相互制约的。
1.直流调速系统的动态指标对于一个调速系统,电动机要不断地处于启动、制动、反转、调速以及突然加减负载的过渡过程,此时,必须研究相关电机运行的动态指标,如稳定性、快速性、动态误差等。
这对于提高产品质量和劳动生产率,保证系统安全运行是很有意义的。
(1)跟随指标:系统对给定信号的动态响应性能,称为“跟随”性能,一般用最大超调量σ,超调时间t和震荡次数N三个指标来衡量,图s2.1是突加给定作用下的动态响应曲线。
最大超调量反映了系统的动态精度,超调量越小,则说明系统的过渡过程进行得平稳。
不同的调速系统对最大超调量的要求也不同。
一般调速系统σ可允许10%~35%;轧钢机中的初轧机要求小于10%,连轧机则要求小于2%~5%,;而在张力控制的卷曲机反映了系统的快速性。
系统(造纸机),则不允许有超调量。
调整时间ts为0.2s~0.5s,造纸机为0.3s。
振荡次数也反映了系统的例如,连轧机ts稳定性。
例如,磨床等普通机床允许震荡3次,龙门刨及轧机则允许振荡1次,而造纸机不允许有振荡。
图2.1突加给定作用下的动态响应曲线(2)抗扰指标:对扰动量作用时的动态响应性能,称为“抗扰”性能。
一般用最大动态速降Δnmax ,恢复时间tf和振荡次数N三个指标来衡量。
用图2.2是突加负载时的动态响应曲线。
最大动态速降反映了系统抗扰动能力和系统的稳定性。
由于最大动态速降及扰动量的大小是有关的,因此必须同时注明扰动量的大小。
恢复时间反映了系统的抗扰动能力和快速性。
振荡次数N同样代表系统的稳定性及抗扰动能力图2.2突加负载时的动态响应曲线2.晶闸管电动机直流调速系统存在的问题图2.3 V-M系统的运行范围晶闸管整流器也有它的缺点。
首先,由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。
由半控整流电路构成的V-M 系统只允许单象限运行(图2.3a),全控整流电路可以实现有源逆变,允许电动机工作在反转制动状态,因而能获得二象限运行(图2.3b)。
自动控制原理计算题题库 1 某系统结构如图二所示,求系统的开环传递函数和闭环传递函数。
当C 值为200时,求R 的值。
2 已知单位反馈系统的开环传递函数为)3)(1(22)(++=s s s G 系统输入量为r(t),输出量为C(t),试求:(1) 当r(t)=1(t)时,输出C(t)的稳态值和最大值;(2) 为了减少超调量,使阻尼比等于0.6,对系统实施速度反馈控制,试画出速度反馈系统方框图,并确定速度反馈系数。
3 已知系统的开环传递函数)10)(2()()(++=s s s K s H s G 为保证系统稳定,并且在)(2)(1)(t t t r +=作用下的稳态误差2.0≤ss e ,试确定K 的取值范围。
4 已知某系统的开环传递函数为)7)(2()()(++=s s s K s H s G , (1)画出以K 为参数的闭环系统根轨迹图;(2)求出使系统不出现衰减振荡的K 值范围。
5 已知某最小相角系统的对数幅频特性如图六中)(0ωL 所示:(1) 求系统的开环传递函数并计算相角裕量γ,判别闭环系统稳定性;(2) 为了改善系统性能,采用1100110)(++=s s s G c 的校正装置进行串联校正,试画出校正后系统的Bode 图,求出相角裕量γ';(3) 在Bode 图上标出相角裕量γ'及幅值裕量)(dB h 。
6 系统微分方程如下:试画出结构图,并求传递函数)()(s R s C7 某系统的结构图如图所示,图中放大器参数4=p k ,电动机参数1.0,1==m d T k 秒, 01.0=d T 秒,(1) 求系统的单位阶跃响应及其s t %,σ和ss e ;(2) 如要求稳态误差小于或等于%)5(e 5%ss ≤,应该变哪一参数,并计算该参数的值。
试分析该参数变化对系统性能的影响。
8 设单位反馈系统的闭环传递函数为n n n n n n a s a s a s a s a s ++++=---1111.......)(φ,试证明系统在单位斜坡函数作用下,稳态误差为零。