第6章-陀螺仪漂移及测试
- 格式:ppt
- 大小:3.85 MB
- 文档页数:54
陀螺仪芯片漂移误差-概述说明以及解释1.引言1.1 概述概述陀螺仪芯片是一种常用的传感器,在许多电子设备和导航系统中被广泛应用。
它可以测量物体的角速度,并提供重要的姿态信息。
然而,由于各种因素的干扰和不完美的设计,陀螺仪芯片会存在漂移误差问题。
这种误差会导致陀螺仪芯片输出的姿态信息与实际姿态有一定的偏差,严重影响了其测量精度和可靠性。
本文将对陀螺仪芯片漂移误差进行深入研究,并探讨其对陀螺仪芯片性能的影响。
首先,我们将介绍陀螺仪芯片的工作原理,解释其如何测量角速度和提供姿态信息。
然后,我们将详细定义陀螺仪芯片漂移误差,并分析其产生原因和影响因素。
在正文的第二部分,我们将讨论影响陀螺仪芯片漂移误差的因素。
这些因素包括温度变化、机械振动、电磁干扰等,它们会扰乱陀螺仪芯片的精确测量。
我们将分析每个因素的影响程度和可能的解决方法,以期降低漂移误差并提高陀螺仪芯片的性能。
最后,在结论部分,我们将总结陀螺仪芯片漂移误差的影响和解决方法。
我们将指出陀螺仪芯片漂移误差对导航系统、无人机等应用领域的重要性,并提出一些可能的改进方向,以进一步减少漂移误差,提高其测量精度和可靠性。
通过对陀螺仪芯片漂移误差的深入研究和讨论,本文旨在增加人们对陀螺仪芯片性能的认识,并对相关领域的研究和实践工作提供有益的指导。
我们相信,通过更好地理解和解决陀螺仪芯片漂移误差问题,我们将能够推动相关技术的发展并取得更好的应用效果。
文章结构部分可以简要介绍整篇文章的组织结构和各个章节的主要内容。
具体内容如下:1.2 文章结构本文将主要围绕陀螺仪芯片漂移误差展开讨论,并按以下章节进行组织和阐述:2.1 陀螺仪芯片的工作原理本节将介绍陀螺仪芯片的基本工作原理,包括其内部构造和运作方式等。
通过对陀螺仪芯片工作原理的介绍,读者可以更好地理解漂移误差的产生机制和影响因素。
2.2 陀螺仪芯片漂移误差的定义在本节中,将详细介绍陀螺仪芯片漂移误差的概念和定义。
university of science and technology of china 96 jinzhai road, hefei anhui 230026,the people’s republic of china陀螺仪实验实验报告李方勇 pb05210284 sist-05010 周五下午第29组2号2006.10.22 实验题目陀螺仪实验(演示实验)实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度?为:?=d?r/dt=m/ip (1) 式中?r为陀螺仪盘的角速度,ip为陀螺仪盘的转动惯量。
m=f.r为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:f=m(g-a) (2) 式中g为重力加速度,a为轨道加速度(或线加速度)轨道加速度与角加速度的关系为:a=2h/tf2; ?=a/r (3) 式中h为砝码下降的高度,r如图1所示为转轴的半径,tf为下落的时间。
将(2)(3)代入(1)2ip?2mr2t?h2mgr可得: (4)2f测量多组tf和h的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物w使陀螺仪ab轴(x轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕x轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量l:l=ip.?r (5) 当在陀螺仪的另一端挂上砝码m(50g)时就会产生一个附加的力矩m*,这将使原来的角动量发生改变:dl/dt=m*=m*gr* (6) 由于附加的力矩m*的方向垂直于原来的角动量的方向,将使角动量l变化dl,由图1可见: dl=ld?这时陀螺仪不会倾倒,在附加的力矩m*的作用下将会发生进动。
光纤陀螺仪测试方法1 范围本标准规定了作为姿态控制系统、角位移测量系统和角速度测量系统中敏感器使用的单轴干涉性光纤陀螺仪(以下简称光纤陀螺仪)的性能测试方法。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注目期的引用文件,其随后所有的修改单(不包含勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB 321-1980 优先数和优先系数CB 998 低压电器基本实验方法GJB 585A-1998 惯性技术术语GJB 151 军用设备和分系统电磁发射和敏感度要求3 术语、定义和符号GJB 585A-1998确立的以及下列术语、定义和符号适用于本标准。
3.1 术语和定义3.1.1 干涉型光纤陀螺仪 interferometric fiber optic gyroscope仪萨格奈克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。
3.1.2 陀螺输入轴 input axis of gyro垂直于光纤环圈等效平面的轴。
当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。
3.1.3 标度因数非线性度 scale factor nonlinearity在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
3.1.4 零偏稳定性 bias stability当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
3.1.5 零偏重复性 bias repeatability在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺仪零偏相对其均值的离散程度。

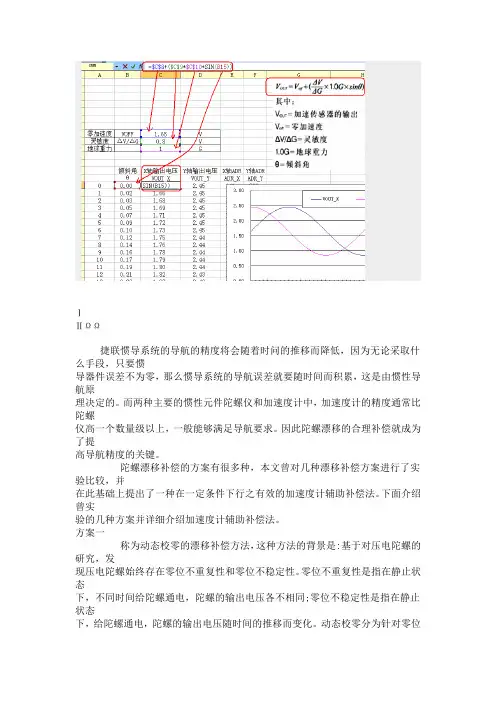
ⅠⅡΩΩ捷联惯导系统的导航的精度将会随着时问的推移而降低,因为无论采取什么手段,只要惯导器件误差不为零,那么惯导系统的导航误差就要随时间而积累,这是由惯性导航原理决定的。
而两种主要的惯性元件陀螺仪和加速度计中,加速度计的精度通常比陀螺仪高一个数量级以上,一般能够满足导航要求。
因此陀螺漂移的合理补偿就成为了提高导航精度的关键。
陀螺漂移补偿的方案有很多种,本文曾对几种漂移补偿方案进行了实验比较,并在此基础上提出了一种在一定条件下行之有效的加速度计辅助补偿法。
下面介绍曾实验的几种方案并详细介绍加速度计辅助补偿法。
方案一称为动态校零的漂移补偿方法,这种方法的背景是:基于对压电陀螺的研究,发现压电陀螺始终存在零位不重复性和零位不稳定性。
零位不重复性是指在静止状态下,不同时间给陀螺通电,陀螺的输出电压各不相同;零位不稳定性是指在静止状态下,给陀螺通电,陀螺的输出电压随时间的推移而变化。
动态校零分为针对零位不重复性的开机零位校正和针对零位不稳定性的零位漂移抑制过程。
零位信号是一个变化较缓慢的信号,在短时间内,可以看作直流分量。
因此,开机零位校正可以采用一个求和过程,对开机时静态陀螺信号进行求和,再将所求之和除以积分的时间得均值,即可将开机零位分离出来。
本文采用的是开机一分钟的均值。
而零位漂移抑制则需要通过对大量陀螺数据的分析,总结出其漂移规律,根据规律预置漂移速率,由漂移抑制算法消除零位的不稳定性。
但是这个方一案存在一些问题,首先零位信号是随时间漂移的,那么开机所求得的零位信号在之后的导航解算中很可能与实际情况不符合从而影响修正的效果;另外,预置漂移速率要求陀螺输出有较强的规律性,而经过大量实验数据的采集和分析,证实本实验采用的陀螺不具有很强的规律性,所以此种动态校零的修正方案在本文并不适用。
方案二本文曾提出过一种方案,称之为最小二乘拟合法。
是根据对采集的大量陀螺数据的分析,建立一个陀螺输出漂移与时间关系的最小二乘的模型,并将陀螺输出分为若干小的时间段,例如I0s(因为在相邻的短时间段内规律性可视为相同),由于时间短,可将每个时间段内的模型近似认为是Y=aX十b, Y为陀螺输出,X为时间变量,a, b为待辨识参数,利用本时间段采集的数据实时估计的陀螺输出漂移的最小二乘模型来预估下一时间段陀螺输出漂移值,将据此估计值下一时间段中对实际陀螺输出进行修正。
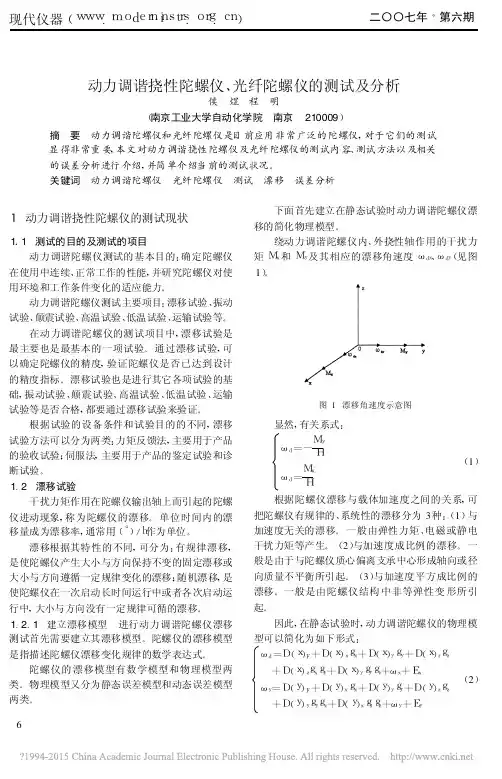
2010年6月第36卷第6期北京航空航天大学学报Journa l o f Be iji ng U nivers it y of A eronauti cs and A stronauti cs June 2010V o.l 36 N o 6收稿日期:2009 04 17作者简介:钱华明(1965-),男,安徽池州人,教授,qianhua m@sina .co m.ME M S 陀螺仪随机漂移仿真和试验钱华明 夏全喜 阙兴涛 张 强(哈尔滨工程大学自动化学院,哈尔滨150001)摘 要:为了提高使用精度,研究了某微机电系统(ME M S ,M icro E lectro M echanical Syste m )陀螺仪的随机漂移模型.应用时间序列分析方法对经过预处理的陀螺仪量测数据进行建模,提出采用状态扩增法设计K al m an 滤波器.进行速率试验和摇摆试验,验证了在静态和恒定角速率条件下,滤波后的误差均值和标准差分别为滤波前的55%和12%.针对在摇摆运动时随着振幅的增加滤波效果下降的问题,设计了自适应Ka l m an 滤波器,分析了衰减因子的选取原则.仿真结果表明:常值衰减因子法和自适应衰减因子法都能显著改善摇摆运动时的滤波效果,而自适应衰减因子法的精度更高.关 键 词:随机漂移;时间序列分析;Ka l m an 滤波;自适应滤波中图分类号:V 241.5文献标识码:A 文章编号:1001 5965(2010)06 0636 04S m i ul a ti o n and experm i ent o f rando m errors of MEMS gyroscopeQ ian H ua m i n g X ia Quanx i Que X ingtao Zhang Q iang(C ollege of Auto m ati on ,H arb i n Eng i neeri ng Un i vers i ty ,H arb i n 150001,C h i na)Abstr act :The rando m errors o f a m icro electro m echan ical syste m (ME M S)gyroscope w as analyzed and m ode l e d to i m prove gyroscope perfor m ance .T i m e series analysis w as used to fit the gyroscope m easure m en t data w hich had been preprocessed .State vector augm enting m ethod w as proposed to design Ka l m an filter .I norder to ver ify the va li d ity o f the m ethod,rate test and osc illati n g test had been done .A fter filtering ,in the case o f static and constant angu lar rate ,the m ean val u e and standard dev iation w ere 55%and 12%of that be f o re filtering respecti v ely .H o w ever ,the effect decreased w hen it turns to osc illating env ironm en.t Adapti v e K al m an filter w as adopted to so l v e the prob le m.The choosi n g pri n ciple of fad i n g factor w as discussed and the filtering perfor m ance o f constant fad i n g factor w as co m pared w ith tha t of adaptive factor .The results sho w ed t h a,t in t h e case o f osc illati n g ,both o f the m cou l d get a re m ar kab l e perf o r m ance i m prove m en,t and the filte ring perfor m ance o f the adaptive fading factor is h i g her t h an tha t o f the constant one .Key wor ds :rando m errors ;ti m e series analysis ;Kal m an filtering ;adaptive filteri n g微机电系统(M E MS,M icro E lectro M echan ica l Syste m )惯性器件具有体积小、成本低、功耗少、抗冲击能力强等优点,由于这些优点,它在低成本惯性系统中获得越来越广泛的应用.但由于制作工艺等原因,目前ME M S 陀螺仪的精度仍然比较低,限制了其进一步应用.研究表明:随机漂移是影响ME M S 陀螺仪精度的重要因素,对其进行模型辨识并滤波是提高陀螺仪性能的主要途径[1].目前针对ME M S 陀螺仪随机漂移补偿的研究很多,主要方法有功率谱密度法、神经网络法、小波分析法等,但这些方法计算量大,得到的模型阶数高,并不十分适合于低成本系统的实时在线估计[2-3].文献[4-6]提出将工程中广泛应用的K al m an 滤波应用到陀螺仪数据处理中,处理过程是首先采用时序分析方法对陀螺仪随机漂移建模,然后设计Ka l m an 滤波器滤波.这些文献对随机漂移建立了正确的模型,然而,在建立Ka l m an 滤波器系统方程时,都没有区分真实角速率和漂移,当真实角速率不为零时会出现明显错误.本文采用状态扩增法设计了Ka l m an 滤波器,进行静态和动态试验验证模型和滤波器的正确性,针对载体摇摆时经典Ka l m an 滤波器效果下降的问题,引入自适应Ka l m an 滤波方法.1 陀螺仪随机漂移模型的建立陀螺仪输出信号 g 用公式表达为g = +r +v (1)其中, 为真实角速率;v 为量测噪声;r 为随机漂移,它为建模对象,为了建模必须将其提取出来,即进行预处理.首先从陀螺输出信号中减去试验中输入的角速率值和常值零偏,然后用均值估计法来消除v,均值估计法表达式[4]为r n =1l ni=n-l+1r *i(2)其中,r *i为量测数据去除确定项后的残差;l 为定常数据窗长度;r n 为r 的时间序列.对r n 进行平稳性和正态性检验,然后建立模型.模型的形式可利用序列的相关函数和功率谱密度特性确定[7],也可直接从最简单的模型开始拟合,根据拟合后残差的大小来确定[8].本文采用第2种方法并考虑了A I C (Aka i k e I nfor m ationC riterion)准则、模型适用性和系统实时性要求.A I C 准则的简化形式为A I C (p )=ln 2a+2p /N(3)其中, 2a为残差方差;N 为数据点数;p 为模型阶数.选用AR (Au to Regressi v e)模型对陀螺仪随机漂移建模,用A I C 准则分析,所得A I C 值随AR 模型阶数变化的曲线如图1所示.图1 A IC 函数曲线由图1可见A I C 函数在p =2时有最小值.由于建模之后要进行Ka l m an 滤波,而滤波计算量以滤波器维数的3次方递增,为了满足系统实时性要求,模型的阶次越低越好,所以p 值在1和2之中选择.选择标准为检验模型适用性,通过计算残差 n 的自相关函数和r n 与 n 的互相关函数来完成.经计算,AR (1)模型中这两个值分别为0.052和-0.085,说明残差信号为白噪声,即所构建的模型满足适用性要求.回归到问题的最初出发点,建模的目的是要提取出白噪声来满足K al m an 滤波器的使用要求,可见一阶模型已经完全满足这一点,故选用AR (1)模型,其表达式为r n =!r n-1+ n n ~N ID (0, 2)(4)其中,!为模型参数; n 为白噪声,其方差为 2.2 Kal m an 滤波器的设计建立模型以后,采用Ka l m an 滤波器进行滤波.因为系统噪声为有色噪声,量测噪声为白噪声,采用状态扩增法对滤波器模型进行改进[9].选取 和r 为状态变量,即X =[ r]T.系统状态方程和观测方程为X k =∀k,k-1X k-1+#k w k(5)Z k =H k X k +v k(6)其中,w k 和v k 为白噪声序列;Z k 为陀螺仪量测值;∀k,k -1=110!;#k =01;H k =[1 0].由式(5)和式(6)构造Ka l m an 滤波器:X ^k,k-1=∀k,k-1X ^k-1(7)X ^k =X ^k,k-1+K k [Z k -H k X ^k ,k-1](8)P k,k-1=∀k ,k-1P k-1∀Tk,k-1+#k ,k-1Q k-1#T k,k-1(9)K k =P k,k-1H Tk(H k P k,k-1H T k+R k )-1(10)P k =(I -K k H k )P k ,k-1(11)其中,Q k 为系统噪声方差阵;R k 为观测噪声方差阵;P k,k -1为一步预测误差方差阵;P k 为估计误差方差阵;K k 为滤波增益矩阵.3 模型和滤波器性能的检验为了验证模型的准确性和滤波器的有效性,对ME M S 惯性测量组件ADIS16350进行试验,该组件包含三轴陀螺仪和三轴加速度计,陀螺仪的零偏不稳定性和量测噪声分别为0.015( )/s 和0.60( )/s .此处只研究一个陀螺仪.主要测试设备为3KTD 565三轴多功能惯导实验转台.3.1 静态试验测试前对陀螺仪固定误差进行补偿,测试时将惯导组件固定在转台端面上,保持静止,通电预热10m i n 后以100H z 采样频率采集并保存30m i n 陀螺仪数据进行离线分析.因为陀螺仪的分辨率较低,难以敏感地球自转角速率,采集的数据只包含随机漂移和量测噪637第6期 钱华明等:M E M S 陀螺仪随机漂移仿真和试验声,对其预处理然后建模.采用Yule W alker 方法来计算模型参数,计算得!=0.107.令X ^0=[0 0]T,全体数据均方根值的10倍作为初始误差方差P 0.代入式(7)~式(11)进行K al m an 滤波解算.滤波后,误差均值和标准差分别由滤波前的-0.3131( )/s 和0.6350( )/s ,降低到-0.1965( )/s 和0.0869( )/s .可见,静止时滤波器可以大幅消减陀螺仪随机漂移.3.2 速率试验控制转台外框依次以 为2,5,10和100( )/s 旋转10m i n ,采集并保存数据.与静态数据处理方法一样,首先对随机漂移进行建模,然后使用K al m an 滤波器滤波,计算滤波前后误差均值和标准差,所得结果见表 1.可见,滤波后误差均值和标准差的降低幅度和静态时相近,分别为滤波前的55%和12%左右.可知在恒定角速率下,该滤波方法仍然适用.表1 速率试验误差均值和标准差( )/s误差均值误差标准差滤波前滤波后滤波前滤波后2-0.3300-0.20170.53500.09655-0.3526-0.19630.62630.102310-0.2964-0.17350.41350.0896100-0.3200-0.19000.52370.09353.3 摇摆试验利用摇摆试验模拟载体的机动状态.以周期为10s ,振幅分别为5 ,15 ,50 和150 控制转台外框摇摆.真实角度A 和 计算公式如下:A =A 0sin 2∃Tt +!0(12)=A ~=A 02∃T cos 2∃Tt+!0(13)其中,A 0为振幅;T 为周期;!0为初始相位.因为转台启动和停止时转动不是正弦振荡,难以确定 ,此处采集12m i n 数据,取中间10m i n 进行分析.滤波前后的误差均值和标准差见表2,A 0=50 时的数据经过滤波后的误差曲线见图2(将全部数据显示不易观察,此处只绘制中间1m in 数据).表2 摇摆试验误差均值和标准差A 0/( )误差均值/(( )!s -1) 误差标准差/(( )!s -1)滤波前滤波后滤波前滤波后5-0.3132-0.24850.66660.094715-0.3213-0.35250.73200.112050-0.3567-0.71650.76050.2407图2 摇摆试验滤波后误差(A 0=50 时K al m an 滤波)由表2和图2可见,随着A 0的增大,滤波后误差均值和标准差逐渐增大,且呈现周期振荡.分析可知,式(5)中∀k,k -1(1,1)设定为1,即默认相邻采样点的角速率值相同.当实际角速率为0或保持恒定时,系统模型准确,滤波效果较好.而摇摆时,各时刻的 值不同,这会导致因模型不准确产生误差.然而,因为载体运动方式的不可预知性,∀k,k -1难以动态确定,因此不对其进行调整,而是探求在系统模型不准确时提高滤波性能的方法.提高采样频率可以使相邻采样点的 尽量保持恒定,减小模型误差,但是这对系统硬件和处理器计算速度提出了较高要求,且采样频率的提高会引入高频噪声,使AR 模型发生不应有的升阶[7],因此该方法并不可取.由于产生震荡误差的直接原因是K al m an 滤波器增益值太小,可以采用衰减记忆自适应滤波,通过减少较早时刻量测值的比重来增大增益值,这是符合物理本质的,因为模型不准确时,较早的量测值就不应该起作用了[8],本文即选用衰减记忆自适应Ka l m an 滤波来提高滤波效果.4 自适应K al m an 滤波自适应K al m an 滤波方程[10]描述如下:P k,k-1=∀k ,k-1P k-1∀Tk,k-1+#k,k-1%Q k-1#Tk,k-1(14)K k =P k,k-1H Tk (H k %P k,k-1H Tk +%R k )-1(15)P k =1%[(I -K k H k )P k,k-1](16)X ^k,k-1=∀k,k-1X ^k-1(17)X ^k =X ^k,k-1+K k [Z k -H k X ^k ,k-1](18)衰减因子%可由先验知识来确定,但具有很大的随意性,文献[11]提出了衰减因子的自适应估计方法,然而这些方法要求计算矩阵的特征值和迹,计算量较大,文献[12]以GPS /I N S 组合导航系统为背景,提出的一种方法在保证滤波精度638北京航空航天大学学报 2010年的前提下减小了计算量,本文对其进行改进后应用到陀螺仪随机漂移处理中.记V k =Z k -H k X ^k ,k-1(19) 若t k -1时刻滤波最优,应有[12]V k ~N (0,H k P k,k-1H Tk +R k )(20)构造{V k }的加权平方和如下:Y k =V Tk [H k (∀k,k-1P k-1∀Tk ,k-1+#k,k-1%Q k-1#Tk,k-1)H T k+R k ]-1V k (21)由概率论知识可知Y k 服从m 自由度的中心&2分布,有如下的检验规则:∋=Y k=∀1 滤波非最优<1 滤波最优(22)其中,∋为统计检验的比例因子; 为门限值,可由预定的置信水平a 借助&2分布表来选定.记A k =H k ∀k,k -1P k -1∀T k,k -1H Tk(23)B k =H k #k,k-1Q k-1#Tk ,k-1H Tk +R k(24)D k =A k +%B k(25) 当滤波最优时,有Y k =V Tk D -1k V k ~&2a(26)分别检验Y k 的每一个分量,满足Y i (k )=[V i (k )]2D ii (k )~&2(1)(27)其中,V i (k )为V k 的第i 个元素;D ii (k )为D k 对角线上第i 个元素.可知,若要使算法最优,%应满足%i <[V i (k)]2A ii (k) -B ii (k )A ii (k )i =1,2,#,m(28)取%*=m i n (1,%1,%2,#,%m )(29)当系统摇摆时,初始时刻量测值不为0,而X ^0=[0 0]T,所求新息V k 较大,若将其代入式(29)中求%*,会得到一个极小的值,再代入式(15)中会使K 值极大,致使系统发散.因此设定%的下限值为0.5,即%=m ax (%*,0.5).因为%在滤波器中只是起微调的作用,其值不应太小,设定此下限也是合理的.分别采用常值衰减因子法(%选取0.8和0.6)和自适应衰减因子法(取a =0.01,即 =6.635)对摇摆试验数据进行分析,计算滤波后的误差均值和标准差,结果见表3.图3为A 0=50 时使用自适应衰减因子法滤波后的误差曲线.对比表2和表3,可见,与经典Ka l m an 滤波相比,2种方法都可以减小误差均值和标准差.常值衰减因子法的误差标准差随着%值的减小和A 0的增大而增大,直至和滤波前相近;误差均值在A 0较小时受%变化的影响不大,A 0较大时随着%的减小而减小.而自适应衰减因子法的误差均值和标准差始终比较小.可见,自适应衰减因子法的精度更高,适应性更强.表3 摇摆试验误差均值和标准差(自适应K al m an 滤波)A 0/( )误差均值/(( )!s -1)误差标准差/(( )!s -1)%=0.8%=0.6自适应法%=0.8%=0.6自适应法5-0.2065-0.2033-0.16880.23520.71050.320615-0.2374-0.2075-0.15200.21150.69330.315850-0.4328-0.2057-0.19410.29560.73250.3072150-0.5634-0.2124-0.19190.30250.71010.3474图3 摇摆试验滤波后误差(A 0=50 时使用自适应衰减因子法)5 结 论本文采用时间序列分析方法对ME M S 陀螺仪随机漂移进行分析和建模,基于状态扩增法设计了Ka l m an 滤波器.对ADI S16350ME M S 陀螺仪的试验和仿真结果表明:以误差均值和标准差为衡量指标,在静态和恒定角速率状态下,经典K al m an 滤波器可以有效减少陀螺仪随机漂移,然而在摇摆运动时,滤波效果会随着振幅的增大而降低.针对摇摆运动设计了自适应Kal m an 滤波器,比较了常值衰减因子法和自适应衰减因子法的滤波效果.结果表明:常值衰减因子法和自适应衰减因子法都可以提高滤波效果,二者相比,后者精度更高.参考文献(References )[1]Ch angH ong l ong ,Xue L i ang ,Q i n W e,i et a.l An integrated M E M Sgyroscope array w i th h igher acc u racy ou t pu t[J].S ensors ,2008(8):2886-2899[2]Ch en X i yuan .M odeli ng rando m gyro drift by ti m e seri es neuralnet w orks and by trad i ti on al m ethod [C ]//Neural N et w ork s &S i gnal Processi ng .Nan ji ng :IEEE,2003:810-813(下转第658页)639第6期 钱华明等:M E M S 陀螺仪随机漂移仿真和试验参考文献(References)[1]Lee H Q,Erz b erger H.A l gorit hm for fi xed range opti m al tra j ectori es[R].NASA TP 1565,1980[2]Sorensen J A,W aters M H,Pat m ore L C.Co m puter progra m f orgenerati on and eval uation of near op ti m um verti ca l fli gh t p rofiles [R].NASA CR 3688,1983[3]W u Shu fan,Re i chert G.Energy state app roach t o t he i ntegratedfli gh t perfor mance m anage m ent of co mmercial aircraft[J].T ran s acti ons of Nan ji ng Un i vers i ty of A eron auti cs&A stronau tics.1997,14(2):101-108[4]郭锁凤,申功璋,吴成富.先进飞行控制系统[M].北京:国防工业出版社,2003:131-150Gu o Suof eng,Sh en Gongzhang,W u Ch engf u.Advanced flight con trol syste m[M].Beiji ng:N ati onal D efen ce Press,2003: 131-150(i n C hinese)[5]吴树范,沈勇璋,郭锁凤.飞机纵向飞行轨迹的优化与实现[J].控制理论与应用,1992,9(4):380-386W u Shu f an,Shen Y ongz hang,Gu o Suofeng.Traj ectory opti m i za tion of aircraft verti cal fli ght p rofile[J].C ontrolTheory and Ap p lications,1992,9(4):380-386(i n Ch i nes e)[6]徐启华,肖顺达,陈新海.基于总能量原理的飞行性能管理计算[J].西北工业大学学报,1994,12(1):25-30Xu Q i hua,X iao Shunda,Chen X i nha.i A lgorit hm f or fli ght perf or m ancem an age m en t app licab l e t o P R Ch i na[J].J ournal ofNort hw estern Po l ytechn i calU n i vers it y,1994,12(1):25-30(i n Ch i nese)[7]宋乐,赵淑利.以飞行成本最优为目的的大型飞机的性能优化[J].兵工自动化,2009,28(6):43-45Song Le,Zhao Shul.i Bes t fli gh t cost p erf or m ance opti m izati on f or large aircraft[J].O rdn ance Industry Auto m ation,2009,28(6): 43-45(i n Ch i nese)[8]田小燕,陈怀民,吴成富,等.基于能量控制的长航时飞机轨迹优化设计及仿真[J].弹箭与制导学报,2004,24(5): 530-532T i an X iaoyan,C hen H uai m i n,W u Chengfu,et a.l Traj ectory opti m i zation of l ong endurance flight energy based control[J].J our na lof Projectil es,Rockets,M i ss il es and Gu i dance,2004,24(5): 530-532(i n C h i nese)[9]程鹏,王艳东.现代控制理论基础[M].北京:北京航空航天大学出版社,2004:101-116Cheng Peng,W ang Yandong.Funda m ental ofm odern con trol the ory[M].B eiji ng:B eiji ng U n i vers it y of Aeronauti cs and A stro nauti c Pres s,2004:101-116(i n Ch i nes e)[10]黄太平.飞机性能工程[M].北京:科学出版社,2005:165-166H uang T ai p i ng.A ircraft p erf or m ance proj ect[M].Beiji ng:Science Press,2005:165-166(i n Ch i nese)(编 辑:李 晶)(上接第639页)[3]李晓莹,胡敏,张鹏,等.交叠式A ll an方差在微陀螺随机误差辨识中的应用[J].西北工业大学学报,2007,25(2): 225-229L iX i aoyi ng,Hu M i n,Zhang Peng,et a.l App lication of overl ap ping A ll an variance i n s t ochastic m odeli ng of m icro gyro[J].Journa l ofN ort hw estern Pol ytechn ical Un i versit y,2007,25(2): 225-229(i n Ch i nese)[4]吉训生,王寿荣.M EM S陀螺仪随机漂移误差研究[J].宇航学报,2006,27(4):640-642Ji Xun s heng,W ang Shou rong.The research on rando m drift of M E M S gyroscope[J].Jou rnal of As tronau tics,2006,27(4): 640-642(i n Ch i nes e)[5]吉训生,王寿荣,许宜申.自适应K al m an滤波在M EM S陀螺仪信号处理中的应用[J].传感器与微系统,2006,25(9): 330-334Ji Xun s heng,W ang Shou rong,Xu Y i s h en.The appli cati on of a dapti ve Kal m an filteri ng i n the si gnal process ofM EM S gyro[J].S ensors and M icro Syste m,2006,25(9):330-334(i n Ch i n ese) [6]Zhang H ua,K e X i zheng,J i ao Rong.Experi m ental res earch onfeedback Kal m an m odel of M E M S gyroscope[C]//The E ighth International C on f eren ce E l ectron i c M eas ure m ent and Instru m en ts.X i an:IEEE,2007:253-256[7]杨叔子,吴雅,轩建平,等.时间序列分析的工程应用[M].武汉:华中理工大学出版社,2007:175-184Y ang Shuz,i W u Ya,Xuan J i anp i ng,et a.l T i m e s eri es an al ysis i n engi neeri ng app licati on[M].W uh an:H uaz hong Un i versit y of S ci ence and Technol ogy Press,2007:175-184(i n Ch i n ese) [8]俞济祥.卡尔曼滤波理论及其在惯性导航系统中的应用[M].西安:西北工业大学出版社,1988:78-91Yu Ji x i ang.The theory ofK al m an filterw it h i ts appli cati on i n i n ertial nav i gati on syst e m[M].X i an:Nort hw estern Po l ytechn i cal Un ivers it y Press,1988:90-91(i n C h i nes e)[9]付梦印,邓志红,张继伟.Kal m an滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003:69-72Fu M engyi n,Deng Zh i hong,Zhang J i w e.i Th e t h eory of Kal m an filter w ith its appli cati on i n nav i gati on s yste m[M].Be iji ng:Sci ence Press,2003:69-72(i n C h i nese)[10]Ji Xuns h eng,W ang Shou rong,Xu Y i shen,et a.l Appli cati on oft h e d i gital si gn al procession i n t he M EM S gyroscope de d ri ft[C]//Proceedi ngs of t he1st I EEE I n tern ati on alCon ference onN ano/M icro Engi n eered and M olecu l ar Syste m s.Zhuh a:i[s.n.],2006:218-221[11]夏启军,孙优贤,周春晖.渐消卡尔曼滤波器的最佳自适应算法及其应用[J].自动化学报,1990,16(3):210-216XiaQ ij un,Sun Youx i an,Zhou C hunhu.i An op ti m al adap tive algori thm f or f ad i ng Kal m an filter and its app li cati on[J].ACTA Au to m ati ca S i n i ca,1990,16(3):210-216(i n Ch i nes e) [12]耿延睿,崔中兴,张洪钺,等.衰减因子自适应滤波及在组合导航中的应用[J].北京航空航天大学学报,2004,30(5):434-437G eng Yanru,i Cu i Zhongx i ng,Zhang H ongyue,et a.l Adapti vefad i ng Kal m an filter w it h app licati ons i n i ntegrated navigati ons yste m[J].J ournal of Beiji ngU nivers it y ofAeronauti cs and A stronau tics,2004,30(5):434-437(i n Ch i n ese)(编 辑:赵海容)658北京航空航天大学学报 2010年。
光纤陀螺仪测试方法1 范围本标准规定了作为姿态控制系统、角位移测量系统和角速度测量系统中敏感器使用的单轴干涉性光纤陀螺仪(以下简称光纤陀螺仪)的性能测试方法。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注目期的引用文件,其随后所有的修改单(不包含勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB 321-1980 优先数和优先系数CB 998 低压电器基本实验方法GJB 585A-1998 惯性技术术语GJB 151 军用设备和分系统电磁发射和敏感度要求3 术语、定义和符号GJB 585A-1998确立的以及下列术语、定义和符号适用于本标准。
3.1 术语和定义3.1.1 干涉型光纤陀螺仪 interferometric fiber optic gyroscope仪萨格奈克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。
3.1.2 陀螺输入轴 input axis of gyro垂直于光纤环圈等效平面的轴。
当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。
3.1.3 标度因数非线性度 scale factor nonlinearity在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
3.1.4 零偏稳定性 bias stability当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
3.1.5 零偏重复性 bias repeatability在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺仪零偏相对其均值的离散程度。