自动控制原理 吴怀宇 课后习题 第四章
- 格式:doc
- 大小:317.00 KB
- 文档页数:6
第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
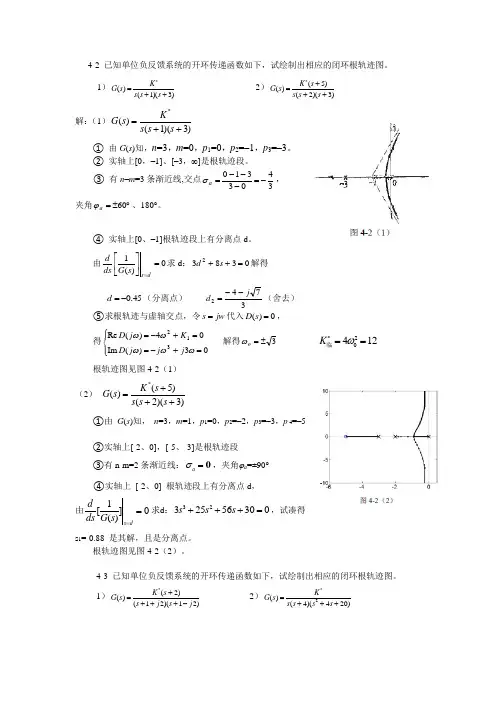
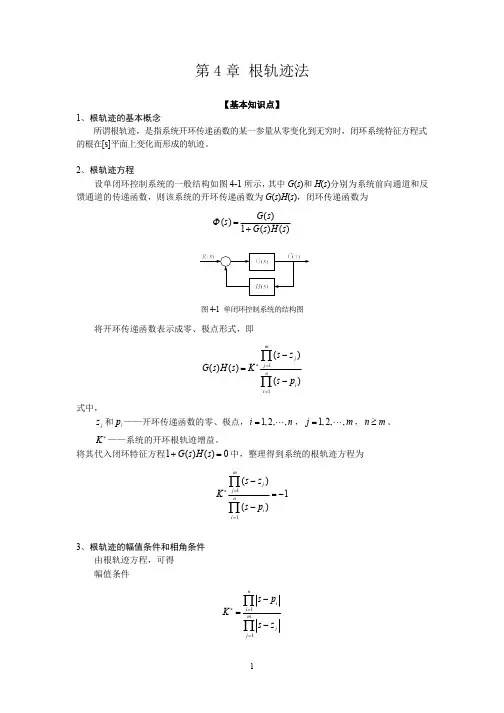
4-2 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*()(1)(3)K G s s s s =++ 2)*(5)()(2)(3)K s G s s s s +=++解:(1)()(1)(3)*K G s s s s =++① 由G (s )知,n =3,m =0,p 1=0,p 2=–1,p 3=–3。
② 实轴上[0,–1]、[–3,∞]是根轨迹段。
③ 有n –m =3条渐近线,交点3403310-=---=a σ, 夹角︒±=60a ϕ、180°。
④ 实轴上[0、–1]根轨迹段上有分离点d 。
由0)(1=⎥⎦⎤⎢⎣⎡=ds s G ds d 求d :03832=++s d 解得 45.0-=d (分离点) 3742j d --=(舍去) ⑤求根轨迹与虚轴交点,令jw s =代入0)(=s D ,得⎪⎩⎪⎨⎧=+-==+-=03)(Im 04)(Re 312ωωωωωj j j D K j D 解得3±=o ω 20412*K ω==临根轨迹图见图4-2(1)(2) *(5)()(2)(3)K s G s s s s +=++①由 G (s )知, n =3,m =1,p 1=0,p 2=–2,p 3=–3,p 4=–5②实轴上[-2、0],[-5、-3]是根轨迹段 ③有n-m=2条渐近线:0a σ=,夹角ϕa =±90°④实轴上 [-2、0] 根轨迹段上有分离点d , 由1[]0()s dd ds G s ==求d :3232556300s s s +++=,试凑得 s 1=-0.88 是其解,且是分离点。
根轨迹图见图4-2(2)。
4-3 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*(2)()(12)(12)K s G s s j s j +=+++- 2)*2()(4)(420)K G s s s s s =+++解:(1)*(2)()(12)(12)K s G s s j s j +=+++-根轨迹图见图4-3(1)(2)*2()(4)(420)K G s s s s s =+++① n =4,m =0,p 1=0,p 2=–4,p 3、4=–2±j 4② p 1、p 2连线中点正好是p 3、p 4实部,开环极点分布对称于垂线s=–2,根轨迹也将对称于该垂线。
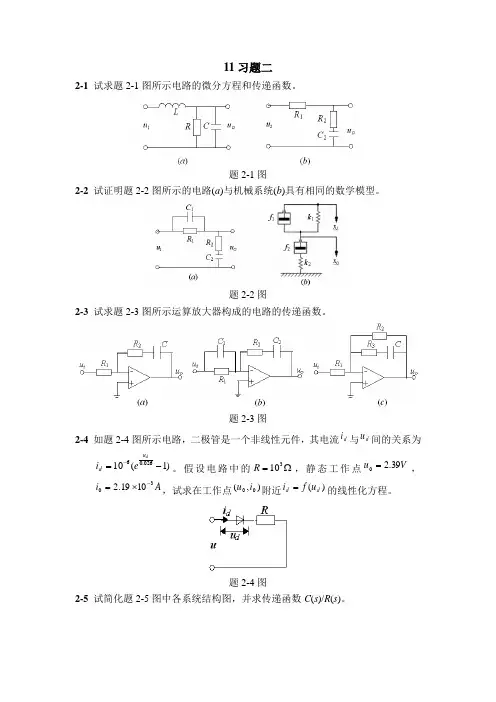
11习题二2-1 试求题2-1图所示电路的微分方程和传递函数。
题2-1图2-2 试证明题2-2图所示的电路(a )与机械系统(b )具有相同的数学模型。
题2-2图2-3 试求题2-3图所示运算放大器构成的电路的传递函数。
题2-3图2-4 如题2-4图所示电路,二极管是一个非线性元件,其电流d i 与d u 间的关系为)1(10026.06-=-du d e i 。
假设电路中的Ω=310R ,静态工作点V u 39.20=,A i 301019.2-⨯=,试求在工作点),(00i u 附近)(d d u f i =的线性化方程。
题2-4图2-5 试简化题2-5图中各系统结构图,并求传递函数C (s )/R (s )。
题2-5图2-6试求题2-6图所示系统的传递函数C1(s)/R1(s),C2(s)/R1(s),C1(s)/R2(s)及C2(s)/R2(s)。
题2-6图2-7试绘制题2-7图所示系统的信号流图,并用Mason公式求系统的传递函数C(s)/R(s)。
题2-7图2-8试绘制题2-8图所示系统的信号流图,并用Mason公式求系统的传递函数C(s)/R(s)。
题2-8图2-9已知系统结构图如题2-9图所示,试写出系统在给定R(s)及扰动N(s)同时作用下输出C(s)的表达式。
题2-9图2-10系统的信号流图如题2-10图所示,试求系统的传递函数C(s)/R(s)。
题2-10图2-11已知单位负反馈系统的开环传递函数(1)试用MATLAB求系统的闭环传递函数;(2)将闭环传递函数表示为零极点形式和部分分式形式。
2-12如题2-12图所示系统结构图(1)试用MATLAB简化结构图,并计算系统的闭环传递函数;(2)绘制闭环传递函数的零极点图。
题2-12图。
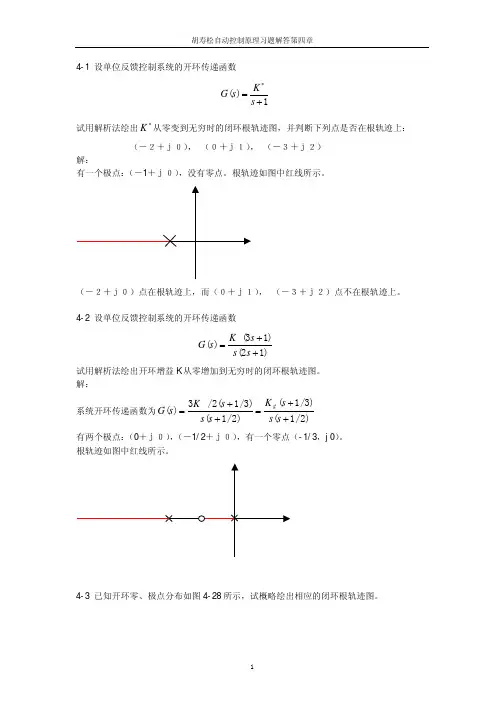
自动控制原理第二版第四章课后答案【篇一:《自动控制原理》第四章习题答案】4-1 系统的开环传递函数为g(s)h(s)?k*(s?1)(s?2)(s?4) 试证明点s1??1?j3在根轨迹上,并求出相应的根轨迹增益k*和开环增益k。
解若点s1在根轨迹上,则点s1应满足相角条件?g(s)h(s)??(2k?1)?,如图解4-1所示。
对于s1= -1+j3,由相角条件?g(s1)h(s1)?0??(?1?j3?1)??(?1?j3?2)??(?1?j3?4)? 0??2??3??6???满足相角条件,因此s1= -1+j3在根轨迹上。
将s1代入幅值条件: g(s1)h(s1?k*?1?1?j3?1??1?j3?2??1?j3?4k8*解出: k=12 ,k=*?324-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
解根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ g(s)?ks(0.2s?1)(0.5s?1)k(s?5)s(s?2)(s?3)* ⑵ g(s)?⑶ g(s)?k(s?1)s(2s?1)解⑴ g(s)?ks(0.2s?1)(0.5s?1)=10ks(s?5)(s?2)系统有三个开环极点:p1?0,p2= -2,p3 = -5①实轴上的根轨迹:???,?5?, ??2,0?0?2?57?????a??33②渐近线: ????(2k?1)????,?a?33?③分离点:1d?1d?5?1d?2?0解之得:d1??0.88,d2?3.7863(舍去)。
④与虚轴的交点:特征方程为 d(s)=s3?7s2?10s?10k?0?re[d(j?)]??7?2?10k?0令 ? 3im[d(j?)]????10??0?解得?????k?7。
根轨迹如图解4-3(a)所j)与虚轴的交点(0,?示。
⑵根轨迹绘制如下:①实轴上的根轨迹:??5,?3?, ??2,0?0?2?3?(?5)????0a??2②渐近线: ????(2k?1)????a?22?③分离点: 1d?1d?2?1d?3?1d?5用试探法可得 d??0.886。
点),3(j -不在根轨迹上。
(3)求5.0=ξ等超调线与根轨迹的交点方法一 ︒=60β,设等超调线与根轨迹交点A s 坐标实部为σ-,则σσ3,j s B A ±-=,有 162)3)(3(2++=++-+as s j s j s σσσσ 令等式两边s 各次项系数分别相等,得⎩⎨⎧==⇒⎪⎩⎪⎨⎧==4216422a aσσσ 方法二 由特征方程01622=++as s ,按照典型二阶系统近似计算得:⎩⎨⎧==⇒⎪⎩⎪⎨⎧==442162a an n n ωξωω 另外,把n n n n j j s ωωωξξω87.05.012+-=-+-=代入特征方程也可求得同样结果。
2-4-6 已知单位负反馈系统的开环传递函数为)1(4/)()(2++=s s a s s G(1)试绘制参数a 由+∞→0变化的闭环根轨迹图;(2)求出临界阻尼比1=ξ时的闭环传递函数。
【解】:(1)系统特征方程为01)144(04401)1(4)(2232=+++⇒=+++⇒=+++s s s a a s s s s s a s等效开环传递函数为: 22)5.0(25.0)144()(+=++='s s a s s s as Ga 由∞→0变化为一般根轨迹。
① 开环极点5.0,03,21=-=-p p 。
② 渐近线与实轴的交点:31-=-σ,渐近线倾角:︒︒︒=300,180,60θ。
③ 实轴上的根轨迹在区间]0,(-∞。
④ 分离点 由 0)()()()(='-'s Q s P s Q s P 得 025.0232=++s s 解得5.01-=s 为起点,17.0612-=-=s 为分离点。
074.0=a 。
⑤ 根轨迹与虚轴的交点 令ωj s =,代入特征方程得⎩⎨⎧==⇒⎩⎨⎧=+-=+-⇒=++--15.0025.0025.0025.025.02323a a a j j ωωωωωωω⑥ 该系统根轨迹如题2-4-6解图所示。
习题二2-1 试求题2-1图所示电路的微分方程和传递函数。
题2-1图2-2 试证明题2-2图所示的电路(a )与机械系统(b )具有相同的数学模型。
题2-2图2-3 试求题2-3图所示运算放大器构成的电路的传递函数。
题2-3图2-4 如题2-4图所示电路,二极管是一个非线性元件,其电流d i 与d u 间的关系为)1(10026.06-=-du d e i 。
假设电路中的Ω=310R ,静态工作点V u 39.20=,A i 301019.2-⨯=,试求在工作点),(00i u 附近)(d d u f i =的线性化方程。
题2-4图2-5 试简化题2-5图中各系统结构图,并求传递函数C (s )/R (s )。
题2-5图2-6试求题2-6图所示系统的传递函数C1(s)/R1(s),C2(s)/R1(s),C1(s)/R2(s)及C2(s)/R2(s)。
题2-6图2-7试绘制题2-7图所示系统的信号流图,并用Mason公式求系统的传递函数C(s)/R(s)。
题2-7图2-8试绘制题2-8图所示系统的信号流图,并用Mason公式求系统的传递函数C(s)/R(s)。
题2-8图2-9已知系统结构图如题2-9图所示,试写出系统在给定R(s)及扰动N(s)同时作用下输出C(s)的表达式。
题2-9图2-10系统的信号流图如题2-10图所示,试求系统的传递函数C(s)/R(s)。
题2-10图2-11已知单位负反馈系统的开环传递函数(1)试用MATLAB求系统的闭环传递函数;(2)将闭环传递函数表示为零极点形式和部分分式形式。
2-12如题2-12图所示系统结构图(1)试用MATLAB简化结构图,并计算系统的闭环传递函数;(2)绘制闭环传递函数的零极点图。
题2-12图。
第一章 绪论1-1 试比较开环控制系统和闭环控制系统的优缺点。
解答:1开环系统(1) 优点:结构简单,成本低,工作稳定.用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1—2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈.由1—1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1—3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+(4)()2()()sin dy t y t u t tdt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++= (6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dt dt =++⎰解答: (1)线性定常 (2)非线性定常 (3)线性时变 (4)线性时变 (5)非线性定常 (6)非线性定常 (7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
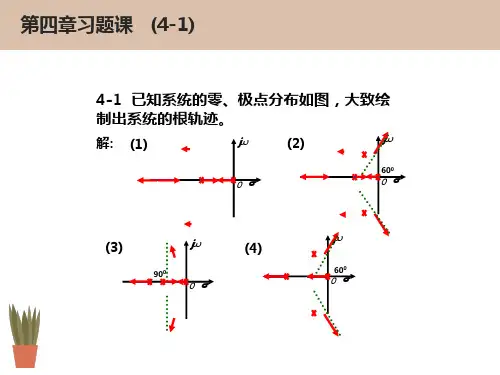
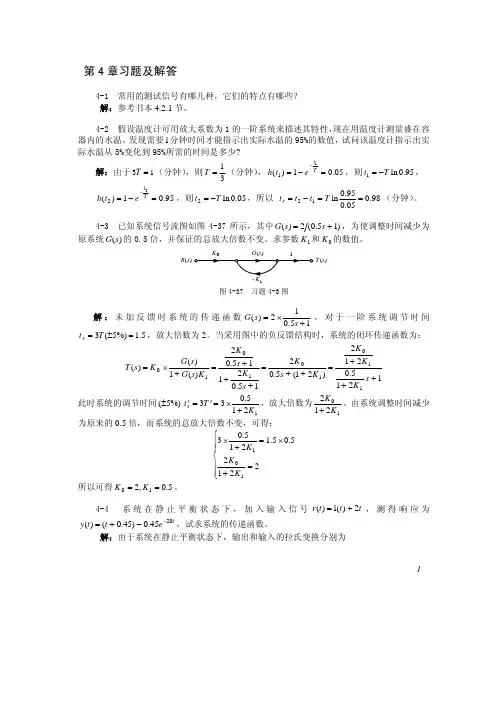
第四章4-1已知单位反馈系统的开环传递函数为()(1)(2)KG s s s s =++ 试绘制该系统在正、负反馈情况下的根轨迹图。
解:(1)负反馈情况令(1)(2)=0s s s ++,解得 3个开环极点1230,1,2p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(2,0)j j j -- 终点均为无穷远处。
在实轴上的根轨迹为(][],2,1,0-∞--两段。
由n=3,m=0得轨迹有3条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=3a k k n m ππϕ++=-()(),(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为60°,180°,-60° 确定分离点,由111++=012d d d ++解得120.42, 1.58d d =-=-由于2d 不是根轨迹上的点,故不是分离点,分离点坐标为1d确定根轨迹与虚轴的交点:控制系统特征方程3232=0s s s K +++令=s j ω 代入上式得3232=0j j K ωωω--++ 写出实部和虚部方程233=020K ωωω⎧-⎪⎨-=⎪⎩可求得=006K K ωω⎧⎧=⎪⎨⎨==⎪⎩⎩因此,根轨迹在ω=6K =;另外实轴上的根轨迹分支在0ω=处与虚轴相交。
负反馈系统根轨迹如下图所示(2)正反馈情况令(1)(2)=0s s s ++,解得 3个开环极点1230,1,2p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(2,0)j j j -- 终点均为无穷远处。
在实轴上的根轨迹为[](]2,1,0,--+∞两段。
由n=3,m=0得轨迹有3条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2=3a k πϕ,(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为0°,120°,-120° 确定分离点,由111++=012d d d ++解得120.42, 1.58d d =-=-由于1d 不是根轨迹上的点,故不是分离点,分离点坐标为2d确定根轨迹与虚轴的交点:控制系统特征方程3232-=0s s s K ++将=s j ω 代入上式得3232-=0j j K ωωω--+ 写出实部和虚部方程23-3=020K ωωω⎧-⎪⎨-=⎪⎩可求得=00-6K K ωω⎧⎧=⎪⎨⎨==⎪⎩⎩ 因此,根轨迹在0ω=处与虚轴相交。
正反馈系统根轨迹如下图所示 4-2设系统的开环传递函数为(+)()(s)()()K s z G s H z p s s p =>+绘制根轨迹图,证明根轨迹的复数部分是圆,并求出圆的圆心和半径。
解:系统实轴上的根轨迹为[](],,,0z p -∞- 根轨迹分离点坐标满足111+=d d p d z++解得12d z d z =-=- 系统闭环特征方程2()+=0s p K s Kz ++解得1,2=-2p Ks +±令=-,2p Kx y +=2222222()()=(z-)()244()()44p K p K x z z z p K Kz p K p K y Kz +++=-++-++==-两式相加得222()=x z y z zp ++- 又分离点d到开环零点距离r=d z -=即2222()r =()x z y d z ++=-故根轨迹的复数部分是圆,圆心为零点,半径为零点到分离点之间的距离。
根轨迹图如下:4-3已知单位负反馈系统的开环传递函数,试绘制根轨迹图。
(1)(2)()(1)(3)K s G s s s s +=++ (2)2(1)()(0.11)K s G s s s +=+(3)(5)()(1)(3)K s G s s s +=++ (4)2(1)()K s G s s += (5)2(4)()(1)K s G s s +=+ (6)2(0.2)()( 3.6)K s G s s s +=+解:(1)由开环传递函数可知,系统有1个开环零点12z =- 3个开环极点1230,1,3p p p ==-=-根轨迹分支数为3,起点分别为(0,0),(1,0),(3,0)j j j -- 一个终点为(2,0)j - 另两个终点为无穷远处。
在实轴上的根轨迹为(][]3,2,1,0---两段。
由n=3,m=1得轨迹有2条渐近线,它们在实轴上的交点坐标111n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=2a k k n m ππϕ++=-()(),(k=0,1)当k=0,1时,计算得a ϕ分别为-90°,90° 则系统根轨迹如下图所示(2)由开环传递函数可知,系统有1个开环零点11z =- 3个开环极点1230,0,10p p p ===-根轨迹分支数为3,起点分别为(0,0),(0,0),(10,0)j j j - 一个终点为(1,0)j - 另两个终点为无穷远处。
在实轴上的根轨迹为[]10,1--段。
由n=3,m=1得轨迹有2条渐近线,它们在实轴上的交点坐标114.5n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=2a k k n m ππϕ++=-()(),(k=0,1)当k=0,1时,计算得a ϕ分别为-90°,90° 确定分离点,由1111++=101d d d d ++解得124, 2.5d d =-=- 确定根轨迹与虚轴的交点:控制系统特征方程320.1=0s s Ks K +++将=s j ω 代入上式可求得=0K ω⎧⎨=⎩则系统根轨迹如下图所示(3)由开环传递函数可知,系统有1个开环零点15z =- 2个开环极点121,3p p =-=-根轨迹分支数为2,起点分别为(1,0),(3,0)j j --,终点分别为(5,0)j -和无穷远处。
在实轴上的根轨迹为(][],5,3,1-∞---两段。
轨迹有1条渐近线,它与实轴上的交点坐标111n mi ji j a p zn mσ==-==-∑∑渐近线与实轴正方向的夹角为21=21a a k k n mπϕπϕπ+=+=-()(),(k=0)则确定分离点,由111+=135d d d +++解得1255d d =-+=-- 确定根轨迹与虚轴的交点:控制系统特征方程2(4)35=0s K s K ++++将=s j ω代入上式可求得=0,3-45K K ωω⎧⎧⎪⎪⎨⎨==-⎪⎩⎪⎩均舍去 则系统根轨迹如下图所示(4)由开环传递函数可知,系统有1个开环零点11z =- 2个开环极点120,0p p ==根轨迹分支数为2,起点分别为(0,0),(0,0)j j ,终点分别为(1,0)j -和无穷远处。
在实轴上的根轨迹为(],1-∞-段。
轨迹有1条渐近线,它与实轴上的交点坐标111n mi ji j a p zn mσ==-==-∑∑渐近线与实轴正方向的夹角为21=21a a k k n mπϕπϕπ+=+=-()(),(k=0)则确定分离点,由111+=1d d d +解得2d =-,则分离点为()2,0j - 则系统根轨迹如下图所示(5)由开环传递函数可知,系统有1个开环零点14z =- 2个开环极点121,1p p =-=-根轨迹分支数为2,起点分别为(1,0),(1,0)j j --,终点分别为(4,0)j -和无穷远处。
在实轴上的根轨迹为(],4-∞-段。
轨迹有1条渐近线,它与实轴上的交点坐标112n mi ji j a p zn mσ==-==-∑∑渐近线与实轴正方向的夹角为21=21a a k k n mπϕπϕπ+=+=-()(),(k=0)则确定分离点,由111+=114d d d +++解得7d =- 则系统根轨迹如下图所示(6)由开环传递函数可知,系统有1个开环零点10.2z =- 3个开环极点1230,0, 3.6p p p ===-根轨迹分支数为3,起点分别为(0,0),(0,0),( 3.6,0)j j j -,终点分别为(0.2,0)j -和无穷远处。
在实轴上的根轨迹为(]3.6,0.2--段。
轨迹有2条渐近线,它与实轴上的交点坐标111.7n mi ji j a p zn mσ==-==--∑∑渐近线与实轴正方向的夹角为2121=22a a k k n m πππϕϕ++==±-()(),(k=0,1)则确定分离点,由1111+=3.60.2d d d d +++解得121.67,0.43d d =-=-则系统根轨迹如下图所示4-5已知系统如下图所示,试绘制根轨迹图。
解:由图可知系统的开环传递函数为32()()22KG s H s s s s=++令3222=0s s s ++,解得 3个开环极点1230,1,1p p j p j ==-+=--根轨迹分支数为3,起点分别为(0,0),(1,)(1,)j j j ---和,终点分别为(5,0)j -和无穷远处。
在实轴上的根轨迹为(],0-∞段。
轨迹有3条渐近线,它与实轴上的交点坐标1123n mi ji j a p zn mσ==-==--∑∑ 渐近线与实轴正方向的夹角为2121=3a k k n m ππϕ++=-()(),(k=0,1,2)当k=0,1,2时,计算得a ϕ分别为60°,180°,-60° 确定分离点,由111++=0(1)(1)d d j d j --+---无解得 无分离点 确定根轨迹与虚轴的交点:控制系统特征方程3222=0s s s K +++将=s j ω代入上式可求得=0=,04K K ωω⎧⎧⎪⎨⎨==⎪⎩⎩由11(21)()m npi zjpi pjpi j j j ik θπϕθ==≠=++-∑∑得出射角为321,,44p p p ππθθθπ==-=则系统根轨迹如下图所示。