产品结构设计-绪论
- 格式:ppt
- 大小:342.50 KB
- 文档页数:17
目录摘要 (I)ABSTRCT (II)1 绪论 (1)1.1课题背景 (1)1.2机器人的定义及特点 (1)1.2.1 机器人的定义 (1)1.2.2 机器人的特点 (2)1.3机器人的构成及分类 (3)1.3.1 机器人的构成 (3)1.3.2 机器人的分类 (4)1.4机器人的应用与发展 (5)1.4.1 机器人的应用 (5)1.4.2 机器人的发展 (7)1.5本文的研究内容 (9)2 SCARA机器人的研究意义和原理设计 (10)2.1SCARA机器人的研究意义 (10)2.2SCARA机器人的特点 (10)2.3SCARA机器人传动方案的确定 (11)3 吸盘式SCARA机械臂驱动设计 (15)3.1机器人驱动方案的对比分析及选择 (15)3.2各自由度步进电机的选择 (16)3.2.1 第一自由度步进电机的选择 (17)3.2.2 第二自由度步进电机的选择 (17)3.2.3 第三自由度步进电机的选择 (18)3.2.4 第四自由度步进电机的选择 (19)4 吸盘式SCARA机械臂集成模块化机构设计 (20)4.1同步齿形带传动设计 (20)4.1.1 求出设计功率Pd (20)4.1 2 选择带的节距 (20)4.1 3 确定带轮直径和带节线长 (20)4.2丝杠螺母设计 (23)4.2.1 丝杠耐磨性计算 (23)4.2.2 丝杠稳定性计算 (23)4.2.3 丝杠刚度计算 (24)4.2.4 丝杠和螺母螺纹牙强度计算 (24)4.2.5 螺纹副自锁条件校核 (25)4.3各输出轴的设计 (25)4.3.1 机身输出轴设计 (25)4.3.2 大臂输出轴设计 (26)4.3.3 带轮轴设计 (26)4.3.4 升降轴设计 (26)4.4壳体设计 (27)结论 (30)致谢 (31)参考文献 (32)吸盘式Scara机械臂结构设计摘要在装配机器人中,平面关节型装配机器人(即SCARA型)是应用最广泛的一种装配机器人。

毕业设计(论文)题目:智能拐杖机械结构设计摘要全球已步入老龄化社会,老年人晚年的生活质量和安全性引起了世界各国学者的关注。
由于年龄原因容易突发意外情况,如摔倒、迷路等,不能跟家人及时取得联系,还有很多老年人容易健忘,外出时经常出现迟滞不归等,因此电子拐杖成为老年人的重要帮手。
现在市场上的手杖品牌混杂,质量参差不齐,功能单一,不能充分满足老年人生理要求。
有不少老年人的手杖是不理想的,一根合适的手杖对老年人的安全十分重要。
根据老年人的需求,我们可以设计一款集多种功能于一体的手杖来满足老年人的出行需求,锻炼需求,安全需求,使他们的生活更加便利,更加舒适。
关键词:拐杖、多功能、老年人、报警AbstractThe world has entered the aging society, the quality of life and safety of the elderly in old age by scholars of the world. Due to age due to unexpected accidents, such as falls, labyrinth, not with the family promptly get in touch, and many older people tend to be forgetful, when they go out often appear sluggish return, so electronic walking stick become a vital ally in the elderly. Now a brand on the market is mixed, uneven quality, single function, can not fully meet the requirements of elderly people. There are many old people walking stick is not ideal, a walking stick for the elderly are very important. According to the needs of the elderly, we can design a set of multiple functions in one of the cane to meet the travel needs of the elderly, training needs, security needs, their life more convenient, more comfortable.Keywords: Crutches, multi-function, elderly, alarm目录1绪论-----------------------------------------------------11.1 目前智能拐杖的研究及现状-----------------------------------------------11.2 课题的背景和意义------------------------------------------------------------12 概述----------------------------------------------------22.1 钢的介绍-----------------------------------------------------------------------22.2 45号钢概述---------------------------------------------------------------------23 硬件系统设计 --------------------------------------------43.1 系统总体结构及工作原理-------------------------------------------------- 43.2 系统主要部分介绍-------------------------------------------------- 43.2.1 高亮度LED灯 -------------------------------------------------53.2.2 LED闪烁灯模块 ---------------------------------------------- 63.2.3 mp3播放器 -------------------------------------------------- 73.2.4 反光镜部分-------------------------------------------------- 83.2.5按键部分 ---------------------------------------------------- 93.3电源及充电---------------------------------------------------------------------103.4可伸缩的拐杖腿设计---------------------------------------------------------- 114 利用CAD软件进行设计智能拐杖 ---------------------------144.1 拐杖的整体设计---------------------------------------------------------------145 结论----------------------------------------------------15致谢 -----------------------------------------------------16 参考文献 -------------------------------------------------17附录------------------------------------------------------18 附录1 设计实物图-------------------------------------------------------------------18前言21世纪是人口老龄化的时代,中国已于1999年进入老龄社会,是较早进入老龄社会的发展中国家之一。
第1章 绪 论教学提示:本章主要讲述了混凝土结构的一般概念,重点阐述了性质不同的两种材料(钢筋和混凝土)能够结合在一起共同工作的可能性和有效性以及混凝土结构的特点;简要地介绍了钢筋混凝土结构在工程中的应用、发展前景及《混凝土结构设计规范》(GB 50010—2002),并对混凝土结构课程的特点及学习方法提出了建议。
教学要求:要求学生在了解混凝土结构一般概念的基础上,深刻理解和掌握钢筋和混凝土共同工作的条件,充分认识钢筋与混凝土的优缺点,了解钢筋混凝土结构在土木工程中的应用及发展前景,做好学习本课程的准备。
1.1 混凝土结构的一般概念混凝土,一般是指由胶凝材料(水泥),粗、细骨料(石子、砂粒),水及其他材料,按适当比例配制,拌和并硬化而成的具有所需形体、强度和耐久性的人造石材。
也被形象地称为“砼”。
混凝土结构是以混凝土为主要材料制成的结构,包括素混凝土结构、钢筋混凝土结构和预应力混凝土结构等。
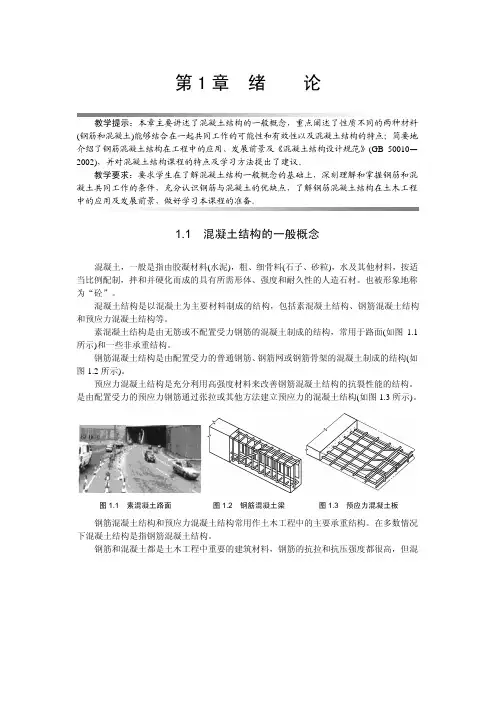
素混凝土结构是由无筋或不配置受力钢筋的混凝土制成的结构,常用于路面(如图1.1所示)和一些非承重结构。
钢筋混凝土结构是由配置受力的普通钢筋、钢筋网或钢筋骨架的混凝土制成的结构(如图1.2所示)。
预应力混凝土结构是充分利用高强度材料来改善钢筋混凝土结构的抗裂性能的结构。
是由配置受力的预应力钢筋通过张拉或其他方法建立预应力的混凝土结构(如图1.3所示)。
图1.1 素混凝土路面图1.2 钢筋混凝土梁图1.3 预应力混凝土板钢筋混凝土结构和预应力混凝土结构常用作土木工程中的主要承重结构。
在多数情况下混凝土结构是指钢筋混凝土结构。
钢筋和混凝土都是土木工程中重要的建筑材料,钢筋的抗拉和抗压强度都很高,但混混凝土结构设计原理·2· ·2·凝土的抗压强度较高而抗拉强度却很低。
为了充分发挥这两种材料性能的优势,把钢筋和混凝土按照合理的组合方式有机地结合在一起共同工作,使钢筋主要承受拉力,混凝土主要承受压力,以满足工程结构的使用要求。
上海大学机电工程及其自动化-薄壁圆筒磨边机的结构设计论文毕业设计(论文)题目: 薄壁圆筒磨边机设计学院机电工程与自动化学院专业(层次) 机械工程及自动化(专升本、本)年级2012级班级专升本学生姓名祝佳陶学号124A0577指导教师金健目录摘要 (1)Abstract (2)第一章绪论 (3)1.1磨削加工的特点概述 (3)1.2砂轮磨削国内外的发展与趋势 (3)1.2.1国外的发展 (3)1.2.2国内的发展 (4)1.2.3发展趋势 (4)1.3砂轮磨削的关键技术 (5)1.4课题设计思路 (5)1.5课题设计结构 (5)1.6课题研究的目的及意义 (5)第二章薄壁圆筒磨边机的总体设计方案 (7)2.1驱动方案的确认 (7)2.1.1液压驱动 (7)2.1.2气压驱动 (7)2.1.3电动机驱动 (8)2.1.4驱动方案的确认 (8)2.2砂轮主轴箱升降机构方案的确认 (8)2.3主轴机构结构方案确认 (9)2.4圆筒夹紧机构的确认 (9)2.5整机方案的确认 (10)2.6本章小结 (11)第三章薄壁圆筒磨边机磨边砂轮主轴的计算 (12)3.1驱动电机的选择 (12)3.2转速图的拟定 (12)3.3传动轴的估算 (13)3.4齿轮模数的估算 (15)3.5各轴结构的设计 (16)3.6主轴组件的刚度和刚度损失的计算 (17)3.7齿轮强度校核 (18)3.8传动轴挠度的验算 (19)3.9本章小结 (20)第四章薄壁圆筒磨边机夹紧机构的设计计算 (21)4.1拟定技术参数 (21)4.2滚珠丝杠的计算及选择 (21)4.3滚珠丝杠支承轴承的选择 (23)4.4滚珠丝杠的校核 (25)4.4.1临界压缩负荷 (25)4.4.2临界转速 (26)4.4.3滚珠丝杠拉压振动与扭转振动的固有频率 (26)4.4.4滚珠丝杠扭转刚度 (28)4.4.5滚珠丝杠传动精度计算 (29)4.5滚珠丝杠进给传动系统变形计算 (29)4.5.1滚珠丝杠精度计算 (30)4.6伺服电机的选择与计算 (32)4.6.1进给伺服电机的校核 (34)4.7联轴器的选择 (35)4.8本章小结 (35)第五章薄壁圆筒磨边机主轴提升机构的设计 (36)5.1拟定技术参数 (36)5.2滚珠丝杠的计算及选择 (36)5.3伺服电机计算及选择 (36)5.4立柱的设计 (36)5.4.1按立柱外形分类 (36)5.4.2材料分类 (36)5.4.3立柱结构的选择 (37)5.5本章小结 (37)第六章结论 (38)参考文献 (40)致谢 (42)薄壁圆筒磨边机设计摘要据经济合作与发展组织日前发布报告称,世界石油需求快速增长,原因是新兴经济体石油消耗不断增长,纽约——美国能源情报署预测,今年全球石油需求将增加1.2%至万桶/日。
智能机器狗结构设计摘要对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器狗将作为家庭的一员进入我们的生活,与我们每天朝夕相处。
可现在普遍存在人们心中的疑问是:将来机器狗将以何种身份进入我们的生活,是玩伴还是佣人,智能机器狗的设计就是为了将来机器狗能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。
本设计采用关节型结构,成功地设计了智能机器狗的本体结构。
本机器狗具有前后行、平地侧行等基本行走功能。
另外机器狗头部还装有CD 摄影机,胸腔内部可装备内置电源和智能设备。
本设计参考了狗的结构组成,使得机器狗结构尽量与狗的本体结构相似,尤其在长度配比方面。
本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。
所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。
伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。
关键词:智能机器狗;结构设计;谐波传动全套CAD图纸,联系695132052Intelligent robot dog frame designAbstractFor our future life, everyone had different ideas, but most people believe that, in future society, the robot dog as a family into our lives, and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot dog into our lives, playmates or servants, the design of intelligent robot dog is to the future robot can enter our Chinese people's family lives, for our happy family life.The design of a joint structure, the successful design of intelligent robot dog, the body structure. The robot dog has before and after the trip, the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head, chest internal equipment can be built-in power supply, and intelligent. The reference design of the structure of the dog, making the structure as the robot dog, the dog's body similar to the structure, particularly in the area ratio of length. The design of the structure is more complicated, the large number of joints, in an effort to optimize the design, designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer, the slowdown in the programme reduction ratio, high efficiency, The ideal slowdown is a good programme.Keywords intelligent robot dog; structural design; harmonic drive目录摘要...................................................................................................................... I Abstract ............................................................................................................... II第1章绪论 (4)1.1 本课题的来源、研究目的和意义 (4)1.2 国内外智能机器人的发展概况 (6)1.3 本设计的主要内容 (8)第2章智能机器狗的设计 (9)2.1自由度的分配及结构方案的设计 (9)2.1.1自由度的分配 (9)2.1.2结构方案的设计 (9)2.2关节驱动方案的选择 (12)2.3传动方案的选择 (13)2.3.1传动方式 (13)2.3.2减速器和减速比的选择 (13)2.3.3电机与减速器的连接方式 (16)2.4结构特点及性能参数 (17)2.4.1智能机器狗的结构特点 (17)2.4.2智能机器狗的结构性能参数 (17)第3章部分关节部件设计计算 (20)3.1各关节力矩的计算 (20)3.1.1膝关节静力矩的计算 (20)3.1.2髋关节向前后运动自由度的静力矩的计算 (20)3.1.3髋关节左右摆动时静力矩的计算 (21)3.1.4颈关节摆动时的静力矩的计算 (23)3.2谐波传动组件的选择与计算 (23)3.3圆柱齿轮减速器组件选择与计算 (23)3.4各关节所需电机的选择与计算 (24)第4章其它部件的选择 (26)第5章成本估算和环保分析 (28)5.1成本估算 (28)5.2环保与经济分析 (28)结论 (30)致谢 (31)参考文献 (32)附录 (33)第1章绪论1.1本课题的来源、研究目的和意义本课题是机器人宠物项目之一。
产品的结构设计是指产品在创新研发环节中结构设计工程师根据产品功能而进行的内部结构的设计工作,产品结构设计的主要工作包括根据外观模型进行零部件的分解、确定各个部件的连接固定方法及位置关系、设计产品使用和运动功能的实现方式、确定产品各部分的使用材质材料和表面处理工艺等等,产品结构设计是机械设计的基本内容之一,也是设计过程中花费时间最多的一个重要工作环节。
在产品的形成过程中,起着十分重要的关键作用。
产品结构设计是产品开发设计中的核心
对于一个产品来说,往往从不同的角度提出许多要求或限制条件,而这些要求或限制条件常常是彼此对立的。
例如:高性能与低成本的要求,结构紧凑与避免干涉或足够调整空间的要求,在接触式密封中既要密封可靠又要运动阻力小的要求,以及零件既要加工简单又要装配方便的要求等
等。
结构设计必须面对这些要求与限制条件,并需根据各种要求与限制条件的重要程度去寻求某种“平衡”,求得对立中的统一。
产品结构设计需要专业的设计团队
牛顿说过:如果说我比别人看得更远些,那是因为我站在了巨人的肩上。
一个成功的产品结构设计离不开一个由具有专业结构工程师、机械工程师、产品设计师组成的设计团队,就相当于牛顿站在了巨人的肩上。
产品结构设计。
摘要床身是立式加工中心非常重要的基础支撑件,它起到了支撑立柱、滑座、工作台等重要零部件的作用,主要承受机床的静载荷以及在加工时产生的切削负载。
床身的静动态性能直接影响机床的加工精度和稳定性,因此,床身结构的优化对于立式加工中心的发展具有十分重要的意义,本课题即结合沈阳机床厂VMC850B立式加工中心的性能特点与相关参数,对立式加工中心床身结构进行了科学系统的设计,具体内容如下:(1)借鉴于同类型的床身结构,根据VMC850B的整机结构设计了床身上表面布局,通过查阅《实用机床设计手册》《机械设计手册》等参考书,科学的设计了床身的截面形状,包括壁厚的选定以及加强肋、方孔、圆孔的合理布置。
同时对床身进行了受力分析并利用ANSYS软件对床身模型采取了静态力有限元分析。
(2)针对与床身相关的重要零部件,包括Y方向伺服进给系统的驱动电机、滚珠丝杠、直线导轨、轴承、联轴器,进行了分析与计算,并最终确立了型号与参数。
(3)提出了床身的精度要求,包含加工和装配过程中的几何精度。
关键词:立式加工中心;床身;结构设计;选型计算;有限元分析;精度设计AbstractThe bed is a very important basis for supporting parts in the vertical machining center, it plays a role that supporting the column, the slide, the workbench and some other important parts. The bed mainly withstands the static load of the machine tool and the cutting load in the processing. The static and dynamic performance of the bed directly affects the machining accuracy and stability. Therefore, the optimization of the bed structure has great significance for the development of the vertical machining centers. The subject, which is combined with the performance characteristics and parameters of the vertical machining center 850B of the Shenyang Machine Tool Factory, have designed the bed structure of the vertical machining center scientifically and systematically, the details are as follows:(1)Learnt from the bed structure of the same type and designed the layoutof the bed top surface under VMC850B’s whole structure, through accessingto <Practical Machine Design Manual> and <Mechanical Design Manual> and otherreference books, scientifically designed the cross-sectional shape of thebed, including the selection of the wall thickness as well as the reasonablelayout of the reinforcing rib, the square and circle holes. The subject alsodid the stress analysis for the bed and used the software called ANSYS todo the finite element analysis of the static force for the model of the bed.(2)For the important parts of the bed, including the Y-direction servofeed drive motor, ball screws, linear guides ,bearings and couplings, didthe analysis and the calculation, and eventually established the models andthe parameters.(3)Put forward the accuracy requirements of the bed, including thegeometric precision of the machining and assembly process.Keywords: the vertical machining ;center the bed ; structural design ;selection calculation finite element analysis ; precision design目录1 机床设计现状 (1)1.1 课题研究的背景和意义 (1)1.2 国内外研究现状与发展趋势 (2)1.3 本论文内容概要 (4)2 床身结构设计 (4)2.1 床身材料 (4)2.2 床身时效处理 (4)2.3 床身结构设计 (5)2.3.1床身重要表面设计 (5)2.3.2床身截面形状设计 (5)2.4 床身热变形 (10)2.5 床身结构确定方案 (11)3 床身零部件的计算与选型 (12)3.1 Y方向滚珠丝杠副的选择 (12)3.1.1 初步计算丝杠导程 (13)3.1.2 滚珠丝杠副当量载荷与当量转速计算 (14)C (17)3.1.3计算预期额定动载荷am (18)3.1.4 估算滚珠丝杠允许最大轴向变形m3.1.5估算滚珠丝杠副的底径 (18)F (20)3.1.6 计算滚珠丝杠副预紧力p3.1.7 滚珠丝杠副剩余结构尺寸确定 (20)3.2 伺服电机的选择 (21)3.2.1电机的负载转矩计算 (21)3.2.2 惯量匹配计算 (22)T计算: (24)3.2.3空载启动时最大加速力矩maxa3.2.4快速空载启动时所需最大启动力矩T计算 (24)M3.2.5 电动机连续匀速工作时的最大力矩T (25)ms3.2.6 电动机输出端轴的直径计算 (25)3.3 滚动轴承的选择 (25)3.3.1 滚动轴承使用条件 (26)3.3.2 初选止动球轴承型号 (26)3.3.3 止推轴承组配方式 (26)3.3.4 止推轴承的选用计算 (27)3.3.5 圆柱滚子轴承的选型计算 (29)结论 (31)致谢 (33)参考文献 (34)1 机床设计现状随着机械制造业的飞速发展与竞争市场需求的不断扩大,数控机床的应用范围持续扩张,同时,为了应对市场日新月异的变化及加工要求难度的不断提高,数控机床产业的水平也在飞速进步,不断向高速化、复合化、高精度化、智能化转变。
第 1 章绪论1.1 概述乘客门是客车的重要组成部分,是乘客上下车的通道,对客车的整体造型也起着重要的协调作用。
客车外形是影响客车性能的一个重要因素。
乘客门是车身外形的一个组成部分,它不仅与客车的动力性、经济性密切相关,而且直接影响客车外形的美观与动感。
随着车速的不断提高,客车的空气动力性问题越来越突出。
过去我国采用较多的是折叠式车门,由于车门内陷而增加了汽车的空气阻力,产生风流噪声,而且由于车门缝隙大,密封困难,在形式中产生强烈的振动噪声和漏尘,从而严重影响乘坐舒适性。
导槽滚轮式乘客门虽然无内陷,但是在车身侧壁有导槽。
因此,在国外的许多旅游客车和长途客车上出现了一种使车身表面平整光滑的乘客门,这就是外摆式乘客门。
近年来,内摆门和外摆门已经在我国客车生产中得到广泛应用。
1.2 乘客门的主要形式客车乘客门的结构形式主要有3种:折叠式、外摆式、内摆式。
折叠式乘客门打开时呈折叠形式,是各种客车普遍采用的传统形式的乘客门。
具有单轴2页和双轴4页2种形式。
外摆式乘客门又称外开平移式乘客门。
外摆式乘客门在关闭时,其外侧与车身外侧面平齐,密封效果、美观性好,近年来不仅在中、高档城间客车上普遍采用,且在城市客车上也得以推广应用。
具有单摆和双摆2种形式。
内摆式乘客门又称内开回移式乘客门。
内摆式乘客门是乘客门中开启后净开度最大的一种,方便乘客上下车,尤其适用于城市客车。
也具有单摆和双摆2种形式。
1.3 外摆乘客门的优缺点本设计的题目是“八米高一级客车外摆乘客门设计”当然设计的重点应该放在外摆式乘客门上。
外摆乘客门与折叠式乘客门相比的优点有:1.开度大,可以开启到门框宽度,有效利用门框空间,保证乘客上下车方便。
2.具有良好的密封性,密封结构简单。
3.开关方便、安全,操纵灵巧。
4.刚性较好、不易变形下沉,行车时不易产生振动噪声。
外形与整车协调,无凹陷,行车时空气阻力小,造型美观。
5.由于外摆式车门驱动机构和锁止机构复杂,成本高;开启过程中外摆的幅度较大,有可能伤及等车的乘客。
《产品结构设计》课程教学大纲课程编号:090207-Z 适用专业:产品造型设计课程类型:必修课课程性质:专业核心课课程学时:60 课程学分:4一、课程定位产品结构设计是产品造型设计的必修核心课程,该课程主要讲述产品零件及装配设计的工艺性以及常用的机构设计原理,从而保证设计方案的生产可行性。
通过课程的学习产品造型设计专业的学生能够在做造型设计的阶段就能够对设计方案进行结构可行性认证,这样不但可以缩短产品开发周期还能够降低产品开发成本和提高产品质量。
本课程的先修课程为产品设计程序与方法、产品造型设计。
二、课程目标1.知识目标(1)掌握零件装配工艺性设计原则与方法;(2)掌握不同材料的零件生产工艺性设计原则与方法;(3)掌握常用的运动机构设计原理;(4)掌握特殊结构性能要求设计原则。
2.能力目标(1)具有材料的判断能力,根据产品的性能要求合理的选择材料;(2)具有生产工艺选择能力,根据设计要求选择合适的加个工艺和供应商。
;(3)具有设计创新能力,能够根据产品性能要求进行结构设计创新。
3.素质目标(1)具有较好的职业素养并具有较强的敬业精神;(2)能够在工作中和其他人员具有较好的合作,具有较强的团队合作意识;(3)能够具有较强的语言表达能力和沟通能力。
三、课程设计1.设计理念根据产品造型设计专业特点和职业岗位能力要求,按照高素质技能型人才培养的特点和规律,在内容上从企业对设计人才能力要求出发,充分体现基于工作过程导向进行设计教学,使学习内容与工作过程相一致,达到学生上岗就能胜任工作的目标。
2.设计思路课程的设计围绕着“实用性”““和“实际性”展开的,从实用性层面来说,所以的知识点都是按照产品结构设计常用的设计原则展开,是现在企业中结构设计师必备的基础知识。
从实际性层面上说,产品的加工工艺和技术参数都符合当前的生产工艺条件,学生学习的相关设计参数能够运用于实际生产。
四、课程内容与学时分配五、教学设计项目一项目二项目三项目四项目五项目六项目七六、考核评价学生的考核成绩主要由三部分构成:平时课堂表现、平时作业、考试。
河南工程学院《机器人技术基础》考查课专业论文工业机器人结构设计学生姓名:肖慧慧学院:机械工程学院专业班级:机制1321专业课程:机器人技术基础任课教师:***2014年12月25 日工业机器人结构设计摘要机器人是一种由三个自由度组成的平面关节型机器人,它的主要作用是可以完成精密仪器和物体的搬运和移动。
由于体积小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机械业等领域。
整个系统由机器手,机器臂,关节,步进电机驱动系统等组成。
通过各自由度步进电机的驱动,完成机器手,机器臂的位置变化。
具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输出轴和壳体的设计,步进电机的选择等。
在校核满足其结构强度的基础上,我们对机器人的结构进行优化设计。
关键词:机器人,结构设计,机器臂Industrial Robot Structure DesignABSTRACTRobot is a robot of plane and joint composed of three degrees of freedom. Its mostly function is used to complete transition and motion of exact apparatuses and objects. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric-ware industry and exact mechanism. The whole system is composed of manipulator hand, manipulator arm, joints and stepper motor driving system. By stepper motor’s driving of each degree of freedom, it completes location change of manipulator hand and manipulator arm. The idiographic designing content is designing of in-phase tooth-shape strap, designing of silk-bar nut, designing of shell and axis and the choice of stepper motors. On the base of checking its structure intensity, while it satisfied, we optimize designing of the structure of Robots.Key Words: Robots, Structure Design, Manipulator Arm.一、绪论1.1 前言工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。
⼩型除雪机结构设计⼩型除雪机结构设计单位名称:设计者:指导教师:⽬录第⼀章绪论 (1)1.1 除雪机的背景分析 (1)1.2 除雪机现状 (2)1.3 本课题的研究⽬标 (4)1.4 本课题研究内容和⽅法 .............................................. 4 第⼆章⽅案选择与结构设计 . (5) 2.1 总体⽅案的⼏种组合及⽐较 (5)2.2⼩型转⼦式清雪机⼯作原理简述 (5)2.2.1基本结构 (5)2.2.2⼯作原理 (6)2.3 原动机的选择 (6)2.4 传动⽅式的选择 (8)2.5 集雪器的设计 (9)2.6抛雪转⼦的设计 ..................................................... 9 第三章传动机构的设计 . (10) 3.1 动⼒参数的计算 (10)3.2 ⽪带传动的计算校核 ..............................................113.3 传动齿轮的设计与校核 ............................................. 17 第四章各轴的结构与尺⼨设计 (19)4.1中间传动轴的设计 (19)4.2绞龙螺旋轴的设计 (19)4.3 ⼩带轮轴的设计 (20)4.4 转⼦轴的设计 (20)4.5 各轴的强度校核 ................................................... 21 谢辞 .................................................. 错误~未定义书签。
参考⽂献 (24)第⼀章绪论1.1 除雪机的背景分析我国地处北半球,亚洲东部、太平洋西岸,幅员辽阔,⽓候类型复杂多样。
北⽅地区冬季普遍降雪,由于冬季季风⽓候特别强盛,降雪的南限纬度⼤致在北纬24度,⽐世界上同纬度的任何⼤陆都要低。