XG804反铲液压挖掘机三维建模
- 格式:docx
- 大小:31.71 MB
- 文档页数:79
重庆大学硕士学位论文液压挖掘机反铲工作装置整机理论复合挖掘力的计算模型及其应用研究姓名:***申请学位级别:硕士专业:机械设计及理论指导教师:***20070423重庆大学硕士学位论文4工作装置的有限元模型应用软件Pro/Engineer分别建立动臂、斗杆的三维实体模型。
由于焊接件对各个零件的尺寸的精度较低且留有焊缝,然而在有限元模型中不允许出现细小的缝隙,因此在建立有限元模型时须对各个零件的尺寸进行修复以消除这些间隙。
用Pro/Engineer建立结构模型时,可把各个焊接件作为为一个零件来建模,这样就能消除装配时因零件相互间的尺寸不符所造成的不吻合现象。
在建模时为了使后面的有限元分析结果可靠,应尽量按实际模型的形状和尺寸建模,同时为了便于网格划分和减少局部的网格数量,应适当对模型加以简化。
如很细小非受力的、不重要的几何形体(对分析结果影响很小的小吊环、螺母、固定油管的管夹及其它辅助元件等)、细微的倒角、凸台、斜面、小边等可以省略。
简化后,斗杆和动臂的三维实体模型分别如图4.5和4.6所示。
图4.5斗杆的三维实体模型Fig4.5Arm's3Dsolidmodel图4.6动臂三维实体模型Fig4.6Boom’s3Dsolidmodel4.4工作装置的有限元模型的建立4.4.1将Pro/Engineor模型导入到ANSYS的方法重庆大学硕士学位论文4工作装置的有限元模型图4.7连接Pro/Engineer与ANSYS的步骤Fi94.7StepstocomlcctPro/EngineerwithANSYS在Pro/Engineer中将三维模型导入ANSYS的方法有很多,最常用的是以IGES导入,IGES是CAD的通用格式,各种CAD软件都有其接口,然而这种方式将较复杂的零件(包括曲面、凸台、腔体等)导入到ANSYS中会出现失真现象,这就需要进行大量的修复才能进行网格划分,这些工作需要耗费大量的时间和精力。
设计计算DESIGN & CALCULATION挖掘机工作装置运动和疲劳强度分析武慧杰1,杨建伟1,张志强2(1. 北京建筑大学 机电与车辆学院,北京 100044;2. 中交路桥北方工程有限公司,北京 100024)[摘要]针对挖掘机工作装置的疲劳损伤,利用Pro/E 及ANSYS 进行三维建模及有限元分析。
通过Pro/E 平台中的机构模块分析工作装置的极限位姿以及运动参数,然后利用工作装置位姿转换,基于力矩平衡关系,对斗杆挖掘和铲斗挖掘工况下的铰点进行受力分析,获取工作装置各铰点的最大载荷。
在此基础上,利用ANSYS 疲劳强度分析得出挖掘机最小疲劳全寿命。
研究结果可为挖掘机工作装置结构设计提供理论参考。
[关键词]挖掘机;运动分析;疲劳强度;全寿命[中图分类号]TU621 [文献标识码]B [文章编号]1001-554X (2015)06-0089-05Kinematics and fatigue strength analysis of excavator working deviceWU Hui -jie ,YANG Jian -wei ,ZHANG Zhi -qiang本文在Pro/E 软件中对挖掘机整机进行实体三维建模,并运用Pro/E 的机构运动分析模块对挖掘机工作装置的包络图及铲斗齿尖的位移、速度和加速度进行仿真模拟。
然后基于ANSYS 软件,结合工作装置位姿关系计算工作装置各铰点承受的最大载荷,在此基础上对挖掘机动臂、斗杆进行应力和全寿命分析,得到挖掘机工作强度和使用寿命的校核结果,为挖掘机工作装置强度和可靠性分析提供了高效的解决办法。
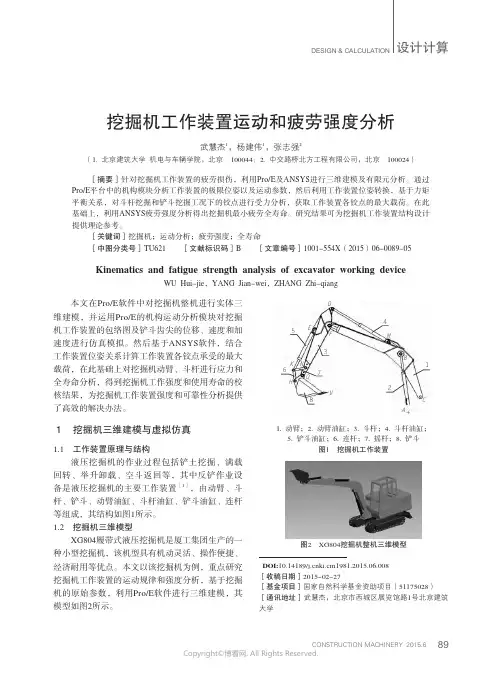
1 挖掘机三维建模与虚拟仿真1.1 工作装置原理与结构液压挖掘机的作业过程包括铲土挖掘、满载回转、举升卸载、空斗返回等,其中反铲作业设备是液压挖掘机的主要工作装置[1],由动臂、斗杆、铲斗、动臂油缸、斗杆油缸、铲斗油缸、连杆等组成,其结构如图1所示。
![毕业设计--挖掘机三维建模及运动仿真[管理资料]](https://uimg.taocdn.com/bdead41c4afe04a1b171de93.webp)
课程名称:机械设计设计题目:厦工XG804履带式小型液压挖掘机工作装置设计院系:机械工程系专业:工程机械班级:10级1班学号:20106958姓名:李俊超西南交通大学峨眉校区2013年6月目录一、设计题目简介................................................. 错误!未定义书签。
二、设计任务...................................................... 错误!未定义书签。
三:设计内容. (2)1、反铲挖掘机工作装置构成 (2)2、运动简图 (4)3、自由度 (4)4、反铲挖掘机设计过程 (4)4.1、特殊工作位置的计算 (4)4.2、基本尺寸的确定 (7)4.2.2、动臂机构参数的确定 (8)4.2.3斗杆机构基本参数的确定 (11)5.有限元分析5.1动臂有限元分析…………………………………………………5.1.1铲斗有限元分析:.................................... 错误!未定义书签。
五、总结 (20)参考文献: (23)三:设计内容1、反铲挖掘机工作装置构成1-斗杆油缸;2- 动臂; 3-油管; 4-动臂油缸; 5-铲斗; 6-斗齿; 7-侧板;8-连杆; 9-曲柄: 10-铲斗油缸; 11-斗杆.图1-1 工作装置组成图图1-1为液压挖掘机工作装置基本组成及传动示意图,如图所示反铲工作装置由铲斗5、连杆9、斗杆11、动臂2、相应的三组液压缸1、4、10等组成。
动臂下铰点铰接在转台上,通过动臂缸的伸缩,使动臂连同整个工作装置绕动臂下铰点转动。
依靠斗杆缸使斗杆绕动臂的上铰点转动,而铲斗铰接于斗杆前端,通过铲斗缸和连杆则使铲斗绕斗杆前铰点转动。
挖掘作业时,接通回转马达、转动转台,使工作装置转到挖掘位置,同时操纵动臂缸小腔进油使液压缸回缩,动臂下降至铲斗触地后再操纵斗杆缸或铲斗缸,液压缸大腔进油而伸长,使铲斗进行挖掘和装载工作。
基于Creo精确绘制液压挖掘机反铲工作装置运动包络图摘要:目前液压挖掘机反铲工作装置运动包络图主要采用传统的手动绘图法,工作量较大且精度不高;利用Creo中的Mechanism模块进行机构运动学仿真,则需要进行复杂的建模、仿真设置,工作量较大及仿真时间较长;以上两种方法均不是最佳方法。
本文采用Creo的多目标设计研究模块,快速进行包络图的精确绘制。
关键词:液压挖掘机;Creo;包络图;多目标设计研究前言液压挖掘机在矿山和土石方工程,包括露天煤矿的开采、市政工程建设、路面修复、及河沟清淤等方面广泛使用,其工作装置的优良设计关乎到其作业的可靠性。
了解工作装置的运动轨迹、范围对合理设计其结构起到关键作用。
目前单斗液压挖掘机工作装置是由动臂、斗杆、连杆、摇臂、铲斗、油缸组成的具有3个自由度的机构,采用绘图法及Creo的Mechanism仿真进行包络图的绘制工作量较大。
Creo为美国PTC公司推出的新一代三维设计软件(本文中使用Creo 2.0版本),用来代替旧版的Pro/E,采用多目标设计研究模块,可快速进行包络图的精确绘制。
1模型草图绘制首先新建零件模型,在此,不需要进行精确地模型建立,只需要简单的绘制动臂、斗杆、铲斗、连杆、摇臂、油缸的草图即可。
以某公司47吨液压挖掘机为例,其工作装置基本草图如下所示(图1):图2草图详解点击『测量』命令,测量D点横坐标X值,然后点击『保存』命令,将名称改为X。
因长度皆为正值,致使D点在X轴下方的纵坐标尺寸为正值,故绘制模型草图时,可设坐标原点位于履带板(地面)下方一定距离L,计算出结果后,D点纵坐标再减去这段距离即可,本文中此距离设置为10000mm。
点击『分析』命令,名称改为Y,类型选择为『关系』,点击『下一页』输入关系式:Y=YD-10000,点击『确定』,完成目标值确定(图3)。
图3 建立设计目标值2多目标设计研究分析下面详细说明下使用多目标设计研究的具体方法。
反铲挖掘机工作装置设计说明书目录1. 设计任务 (1)2. 工作装置主要部件的参数设计 (1)2.1 反铲工作装置结构方案的确定 (1)2.1.1 确定动臂结构形式和动臂油缸的布置方案 (2)2.1.2 确定斗杆和斗杆油缸的布置 (2)2.1.3 确定铲斗连杆机构的结构形式 (2)2.2 铲斗结构参数的确定 (2)2.3 动臂机构设计 (3)2.3.1 动臂机构设计的主要内容 (3)2.3.2 具体的设计步骤 (3)2.4 斗杆机构的设计 (7)2.4.1 反铲斗杆机构设计的主要内容 (7)2.4.2 斗杆具体设计步骤 (7)2.5 反铲铲斗连杆机构的设计 (8)3. 反铲工作装置的运动分析及坐标计算 (9)3.1 符号约定与坐标系的建立 (9)3.2 反铲工作装置工况的选定 (10)3.3 回转平台的运动分析及坐标计算 (10)3.4 动臂的运动分析及坐标计算 (11)3.5 斗杆的运动分析及坐标计算 (12)3.6 连杆及铲斗的运动分析及坐标计算 (14)4. 反铲工作装置作业参数计算 (16)4.1 最大挖掘深度1h 计算 (16)4.2最大挖掘高度2h 计算 (17)r计算 (17)4.3最大挖掘半径1r (17)4.4 停机面上的最大挖掘半径h (18)4.5 最大卸载高度34.6 最大垂直挖掘深度4h (18)4.7 水平底面为2.5m时的最大挖掘深度5h (19)4.8 计算结果对比 (19)5. 某工况下铰点K、Q的受力分析 (20)5.1 工况选定 (20)5.2 铰点K、Q的受力分析 (20)6. 工作装置主要部件的三维建模 (22)6.1 零部件的三维建模 (22)6.2 整体三维模型 (25)7. 包络图的绘制 (25)7.1 ADAMS软件简介 (25)7.2 Solidworks模型导入ADAMS步骤 (26)7.3反铲工作装置的ADAMS挖掘包络图绘制步骤 (26)反铲挖掘机工作装置设计说明书1. 设计任务1)设计一款反铲挖掘机的工作装置,完成其工作装置的参数设计;2)选定某个工况,进行工作装置的运动分析并且完成该工况下的铰接点坐标计算;3)反铲工作装置的主要作业参数计算;4)选定某个工况,完成该工况下某几个铰接点的受力分析;5)运用三维建模软件,完成工作装置的三维建模工作;6)运动动力学仿真软件ADAMS,画出工作装置的挖掘包络图。
液压挖掘机工作装置建模分析与仿真钟星;邵辉;胡伟石【摘要】针对液压挖掘机运动学和动力学建模复杂过程,以某型6t挖掘机工作装置为研究对象,利用Sim-Mechanics对机械结构进行快速建模,从而代替运动学模型获得挖掘机机构模型.采用Pro/E软件对液压挖掘机工作装置建立三维模型,将其导入ADAMS环境中,并对比验证作业结果.在ADAMS软件中,对挖掘机工作装置进行动力学仿真,得到液压挖掘机的工作特性曲线.仿真结果表明:理论上添加的载荷能够体现在各个驱动关节处受力变化中,相比其他阶段,在挖掘阶段关节受力矩变化影响较为复杂.%Motivated by complicated kinematics and dynamics modeling processes for hydraulic excavator,the presented paper aims to analyze mechanism modeling in 6 t hydraulic excavator.By usingMATLAB/SimMechanics,the mechanical structure of the excavator was modeled rapidly instead of kinematics model.Its 3D model was constructed by using Pro/E and it was imported to ADAMS for remodeling.The reachable working area was compared with the result given by SimMechanics model.Furthermore,dynamics simulation of excavator working device were carried out with ADAMS software,and the working characteristic curves of the hydraulic excavator were obtained.The results of the simulation show that in theory added load on excavator bucket can be reflected in the torque change at each pared with other stages,the torque change is more complicated in the excavation stage.【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2017(038)005【总页数】6页(P602-607)【关键词】液压挖掘机;机构模型;动力学分析;ADAMS软件【作者】钟星;邵辉;胡伟石【作者单位】华侨大学信息科学与工程学院,福建厦门361021;华侨大学信息科学与工程学院,福建厦门361021;华侨大学实验室与设备管理处,福建厦门361021【正文语种】中文【中图分类】TU621Abstract: Motivated by complicated kinematics and dynamics modeling processes for hydraulic excavator, the presented paper aims to analyze mechanism modeling in 6 t hydraulic excavator. By usingMATLAB/SimMechanics, the mechanical structure of the excavator was modeled rapidly instead of kinematics model. Its 3D model was constructed by using Pro/E and it was imported to ADAMS for remodeling. The reachable working area was compared with the result given by SimMechanics model. Furthermore, dynamics simulation of excavator working device were carried out with ADAMS software, and the working characteristic curves of the hydraulic excavator were obtained. The results of the simulation show that in theory added load on excavator bucket can be reflected in the torque change at each joint. Compared with otherstages, the torque change is more complicated in the excavation stage. Keywords: hydraulic excavator; mechanical structure model; dynamics analysis; ADAMS software挖掘机是执行各项工业工程任务的重要设备,在工业、交通、运输、建筑、水利、矿山开采等各个领域中已被广泛使用[1].在某些复杂、危险及特殊的工作场合,冲击和振动多,不适合人工操控,自主挖掘成为不可或缺的得力助手,这也促使挖掘机向智能化、自动化方向发展.对液压挖掘机的工作装置进行建模分析是实现自动挖掘的重要研究基础.卡内基梅隆大学设计出能够按照一定的策略自主挖掘装载的机器人[2-3].Hall等[4]将迭代算法运用于对挖掘机的铲斗运动轨迹的控制,并将该算法应用于其他多杆机构.Tomi等[5]讨论了用全球定位系统(GPS)及CAD模型精确定位挖掘机的移动位置的方法,并采用ADAMS与MATLAB/Simulink进行了联合仿真验证.目前,大多采用类比法、查阅表格法、相关理论计算等对挖掘机工作装置进行作业可达范围研究[6].这些方法计算量大、精度低且耗时.以往的动力学分析主要集中在强度、刚度、结构优化等方面[7-8],对动态过程的动力学分析较少[9].为此,文中对液压挖掘机工作装置进行建模分析与仿真[10].以某型6 t液压挖掘机为研究对象,在MATLAB工具箱中的SimMechanics基础上,建立挖掘机机械结构模型,只需根据动臂、斗杆和铲斗的绝对转角变化信息,即可获得挖掘机作业轨迹和可达范围.该方法简化了计算和分析过程,简单快捷.同时,采用Pro/E软件建立挖掘机工作装置的三维模型,并将其导入ADAMS软件中,添加相应的运动副、约束和驱动函数,进行仿真、对比、分析,验证其可行性.1.1 基于MATLAB/SimMechanics建立机构模型液压挖掘机结构示意图[11-13],如图1所示.图1中:A~D分别为动臂下铰点、动臂与斗杆的铰点、斗杆与铲斗的铰点、斗齿尖.利用MATLAB/SimMechanics建立挖掘机仿真模型的步骤,如图2所示.基于MATLAB/SimMechanics的工作装置模型,如图3所示.图3中:工作装置模型是由1个机械环境模块、1个地模块、3个刚体模块、3个关节转动副模块和3个铰接点运动激励模块等组成.文中刚体质量、转动惯量和质心均不予以考虑,并根据6 t挖掘机的实际参数对应于各个模块进行赋值.1.2 基于Pro/E与ADAMS建立机构模型运用Pro/E对液压挖掘机工作装置建立三维模型,如图4所示.利用PARASOLID格式将挖掘机几何模型导入ADAMS中,并添加相应的运动副和约束,为挖掘机工作装置分配时间,添加驱动函数.1.3 仿真与分析基于SimMechanics建立的机构模型,在其可达范围仿真过程中,时间设为无限长,初始状态为各关节最大伸展状态.挖掘机模型在t=7.2 s时的状态图,如图5所示.t=9 605 s时,铲尖运动轨迹的输出情况,如图6所示.图6中:LX,LY分别表示X,Y方向上的位移.由图6可知:最大挖掘深度h1=4.531 1 m,最大抬升高度h2=5.497 1 m,最大水平挖掘范围h3=5.562 8 m.完成包络线的运动过程中,各曲线段运动过程中动臂、斗杆和铲斗的动作情况,如表1所示.基于ADAMS建立的机构模型,在其可达范围仿真过程中,采用ADAMS函数库中的STEP函数控制液压油缸的伸缩行程,设置各个液压油缸STEP函数,如表2所示.在铲尖处创建Marker测量点,方便对铲尖位置的测量.选取初始状态为各液压缸全缩状态,仿真时间设置为16 s,步长为500,仿真计算并显示结果.通过运动仿真绘制的挖掘机工作装置作业范围,如图7所示.为了验证仿真模型的可靠性,将图6,7所示的结果进行比较.由图6,7可知:运用SimMechanics获得挖掘机工作过程中,最大挖掘高度、挖掘半径、卸载高度与ADAMS软件仿真模拟实际作业结果基本吻合,从而验证了方法的正确性.2.1 挖掘载荷的计算液压挖掘机在进行挖掘任务时,可采用斗杆挖掘、铲斗挖掘和混合挖掘等多种作业方式,工作装置所承受的挖掘阻力因采取的挖掘方式不同而不同[14-15].一般情况下,挖掘过程是以各液压油缸同时伸缩的混合挖掘方式进行的[16-17].挖掘阻力可按照挖掘轨迹的切线方向和法线方向分解为WQ和Wf[18],有式(1)中:K0为挖掘比阻力系数;b为铲斗平均宽度或挖掘宽度;h为挖掘深度;μ挖掘阻力系数.对液压挖掘机完成一个挖掘工作周期进行研究.其中,工作周期包括到达挖掘起始点位置、挖掘、提升和卸料4个环节.故采用混合挖掘机阻力进行计算,挖掘土壤类型选取Ⅲ级,挖掘比阻力系数K0取19.5 N·cm-2,斗宽b取90 cm,挖掘深度h取27.9 cm,挖掘阻力系数μ取0.42.计算得WQ=48.96 kN,Wf=20.57 kN.挖掘土壤产生的重力为式(2)中:ρ为土壤的密度,取1.8×10-6 kg·m-3;g为重力加速度,取9.8 m·s-2;V为铲斗容量,取0.25 m3.经过计算,可得G=4.4 kN.2.2 仿真与分析在进行动力学仿真前,利用ADAMS建立的挖掘机工作装置模型,在一个基本的工作周期内,对各个阶段进行时间分配、驱动函数添加与载荷的添加.液压挖掘机的工作循环图,如图8所示.选取动臂油缸、斗杆油缸和铲斗油缸均全缩的状态为初始状态,仿真时间设为20 s,步长为500,通过后处理模块得到的特性曲线,如图9~12所示.由图9可知:土壤重力是从2 s初铲斗开始执行挖掘任务时,由零逐渐增大,在7 s 末挖掘任务结束时,重力增加至最大值4.40 kN,此时,铲斗处于满载状态;之后,在动臂提升阶段至卸载前均保持不变,到11 s初铲斗开始卸载,重力不断减小,直到16 s末土壤完全卸空,重力降为零;挖掘法向和切向阻力在2 s初铲斗进行挖掘时,由零逐渐增大,在4.5 s末分别达到最大值48.96,20.57 kN;然后,随着铲斗开始收斗后逐渐减小,直至完成挖掘任务后降为零.由此可知,载荷和重力可以合理地体现在挖掘的过程中.按时间顺序对图10~12进行如下分析.1) 0~2 s是到达初始挖掘点(最大挖掘半径点)阶段.该阶段是由动臂油缸完成,动臂油缸伸长至2 s末,到达最大位置0.35 m,油缸速度先增后减,斗杆油缸与铲斗油缸位移(L)和速度(v)均保持不变.由于自重与惯性力的影响,动臂的驱动关节力矩(T)有一个较大的突变,在短时间内减小至零,然后增大,另外2个驱动关节力矩较小,且变化幅度也不大.2) 2~7 s是挖掘阶段.此阶段由斗杆油缸与铲斗油缸共同配合完成,斗杆油缸在2 s初开始伸长,6 s末到达最大位置0.55 m,随后保持不变.铲斗油缸从3 s初伸长至7 s末,到达最大位置0.565 m.斗杆油箱和铲斗油缸速度均呈现先增后减的状态,而动臂油缸位移与速度则保持不变.3个驱动关节力矩均经历了先增后减的过程.在4.3 s时,斗杆的驱动关节力矩达到最大值,铲斗的驱动关节力矩达到最大值,动臂的驱动关节所受力矩达到最大值.之后,3个驱动关节力矩除了在6.8 s左右至挖掘任务即将结束时,动臂的驱动关节力矩有小幅度增加,其余总体趋势大致都在减小,由此可知,液压油缸的减速伸长对挖掘机工作装置系统造成了一定的冲击影响.3) 7~11 s是满铲提升阶段.在此阶段中,斗杆油缸与铲斗油缸均不动作,动臂油缸由原来的0.35 m收缩至0.10 m.其中,3组油缸速度均经历了先增后减的过程,3个驱动关节力矩基本稳定.4) 11~16 s是卸载阶段.此阶段中,动臂油缸不参与运动,故动臂油缸不动作,速度为零.斗杆油缸在11 s初收缩,14 s收缩至最短,油缸速度也在同时刻先增后减,铲斗油缸在14 s开始收缩直至卸载结束,油缸速度在11~14 s,以及14~16 s均经历了先增后减的过程.由于自重和惯性力的作用,3个驱动关节力矩都有所增加,卸载过程所受外载荷越来越小,所以驱动关节受力矩有些许的突变.5) 16~20 s是返回初始状态阶段.该阶段动臂油缸收缩至最短,速度先增后减.斗杆油缸与铲斗油缸位移和速度均保持不变.3个驱动关节力矩基本都是平稳下降的,仅在动臂开始和制动时有小幅度的突变.纵观挖掘机的整个运动过程可知:3个驱动关节力矩总体变化趋势基本相似,但由于挖掘机工作姿态的变化对动臂的驱动关节力矩产生一定的冲击影响,突变明显.工作装置惯性载荷与挖掘机液压系统对其存在密不可分的影响.在自动挖掘过程中,通过实时分析获得各个驱动关节力矩、液压缸位移和速度变化曲线,为更好地实现平滑挖掘,高效挖掘奠定基础.对挖掘机工作装置机械结构与动力学问题进行理论建模,利用SimMechanics快速建模绘制机械结构运动的包络图,获得挖掘机可达工作范围,进一步运用Pro/E 对挖掘机工作装置建立三维模型,将模型导入ADAMS软件,对挖掘机工作装置的作业范围进行对比,验证方法的正确性.采用ADAMS软件,对挖掘机工作装置进行动力学仿真,得到挖掘机油缸位移、速度和各个驱动关节力矩与时间的特性曲线,对实现自主挖掘具有重要意义.仿真结果表明:理论上添加的载荷能够体现在各个驱动关节处受力变化中,相比其他阶段,受力矩变化较为复杂的是在挖掘阶段,该研究为今后挖掘机实现自动挖掘提供理论依据,为进一步研究挖掘机自主平滑避障轨迹规划和有限元分析力的加载奠定基础,也为实际的挖掘作业提供指导.【相关文献】[1] 吕鹏伟.液压挖掘机工作装置动力学特性的研究[D].太原:太原科技大学,2013.[2] PEYRET F,JURASZ J.The computer integrated road construction project[J].Automation in Construction,2000(9):447-461.[3] SINGH S,CANNON H.Muti-resolution planning for earth moving[C]∥Proceedings International Conference on Robotics and Automation.Leuven:[s.n.],1998:121-126.[4] HALL A S,MCAREE P R.Robust bucket position tracking for a large hydraulic excavator[J].Mechanism and Machine Theory,2005,40(1):1-16.[5] TOMI M,KELERVO N,RAUNO H.Automation of an excavator based on a 3D CAD model and GPS measurement[J].Automation in Costruction,2006,15(5):571-577.[6] 李杨民,谢存禧,王骥湘.液压挖掘机工作装置动臂、斗杆机构的多体系统运动学分析[J].建筑机械,1994(11):22-25.[7] LEE M C,CHUNG S H,CHO J H,et al.Three-dimensional finite element analysis of powder compaction process for forming cylinder block of hydraulic pump[J].Powder Metallurgy,2008,51(1):89-94.[8] SUI Tianzhong,WANG Lei,TAN Zhen,et al.Structural parameters optimization of excavator working device based on mining process[J].Advanced MaterialsResearch,2012,421:759-763.[9] 张树忠,邓斌,柯坚.基于液压变压器的挖掘机动臂势能再生系统[J].中国机械工程,2010,21(10):1160-1166.[10] 吕广明,刘明思,杨扬,等.基于Pro/E ADAMS的液压挖掘机工作装置的动力学仿真分析[J].建筑机械,2013(17):86-90.[11] 林慕义,史青录.单斗液压挖掘机[M].北京:冶金工业出版社,2011:35-57.[12] 刘韬.液压挖掘机工作装置结构特性分析与仿真[D].长沙:中南大学,2010.[13] 郑东京.挖掘机工作装置的有限元分析及其仿真[D].杨凌:西北农林科技大学,2011.[14] 王敏.液压挖掘机工作装置的动态仿真及有限元分析[D].西安:长安大学,2015.[15] 王在昌.液压挖掘机工作装置动力学分析及有限元优化分析[D].济南:山东科技大学,2011.[16] 张桂菊,肖才远,谭青,等.基于虚拟样机技术挖掘机工作装置动力学分析及仿真[J].中南大学学报(自然科学版),2014(6):1827-1833.[17] 郭银赛,张毅,程明科.基于虚拟样机技术的挖掘机工作装置运动仿真与优化设计[J].机床与液压,2015,43(15):169-172.[18] 李渊博,何清华,张大庆.液压挖掘机工作装置动力学分析与仿真研究[J].机床与液压,2006(10):170-171.。
动臂。
虽然使结构和操作复杂化,但在挖掘机作业中可随时大幅度调整上、下动臂之间的夹角,从而提高挖掘机的作业性能,尤其掘窄而深的基坑时,容易得到较大距离的垂直挖掘轨迹,提高挖掘质量和生产率。
组合式动臂的优点是,可以根据作业条件随意调整和挖掘力,且调整时间短。
此外,它的互换工作装置多,可满足各种作业的需要,装车运输方便。
其缺点是质量大、制造成本高,一机上。
的是组合式动臂。
挖掘机反铲装置的分析作性能参数量0.8m3。
掘深度4.39m。
掘高度4.64m。
掘半径5.52m。
载高度2.66m。
掘力(最大>52kN。
置运动学分析示,反铲装置的几何位置取决于动臂油缸的长度L1,斗杆油缸的长度L2和铲斗油缸的长度L3。
当L1、L2和L3为一组定值时,便Yv>的一组值与其对应。
反之,对于Xv和Yv的一组定值却有许多组L1、L2、L3值与其对应。
图1 动臂机构计算简图构。
∠UCF是动臂油缸L1的函数。
动臂上任意一点在任一时刻的位置坐标也都是L1的函数。
构。
置参数是动臂油缸L1和斗杆油缸L2的函数。
这里暂先讨论斗杆相对于动臂的运动,即只考虑L2的影响。
斗杆机构与动臂机构性质连杆机构,但连杆比不同。
其连杆机构。
动是动臂油缸L1、斗杆油缸L2和铲斗油缸L3的函数,情况较复杂。
这里暂讨论铲斗相对于斗杆的运动。
置动力学分析力的分析。
工作时,即可用铲斗油缸挖掘(简称转斗挖掘>,也可用斗杆油缸挖掘(简称斗杆挖掘>,或做复合动作挖掘。
掘阻力的计算。
时,土壤切削力随挖掘深度改变而有明显变化,经实验转斗挖掘时的切削阻力与切削深度基本上成正比。
但总地来说,前半过程切削,因前半过程的切削角不利,产生了较大的切削阻力。
切削阻力的切向分力与土壤硬度、转斗切削半径、挖掘过程中铲斗总转角、铲、切削角、斗侧壁厚度和切削刃挤压土壤的力有关。
转斗挖掘的平均阻力可按平均挖掘深度下的阻力计算,也把半月形切削断面看作面,条形断面的长度可看作成斗齿转过的圆弧长度与其相应之弦的平均值。
西南交通大学峨眉校区《机械设计》课程设计论文厦工XG804履带式小型液压挖掘机底盘部分设计院系:机械工程班级:工程机械姓名学号班级工机二班联系电话或Email地址设计题目厦工XG804履带式小型液压挖掘机设计内容本次的设计为履带式液压挖掘机。
液压挖掘工作装置一般由动臂、斗杆、铲斗以及动臂油缸、斗杆油缸、擦干都油缸等组成。
设计的内容为总体设计,主要包括主工作臂的设计和推土铲的设计。
总体设计的优劣决定了其它零部件设计的质量,也决定了整机的性能。
合理的、全面的总体设计是整个设计任务顺利完成的保证。
设计思路此次设计的主工作装置主要采用反铲装置,动臂部分主要采用整体式弯动臂,这样有利于得到较大的挖掘深度。
斗杆部分主要采用整体式直动斗杆;铲斗部分采用道侧齿的铲斗。
底盘行走系采用履带式行走底盘,在设计底盘过程中尽量采用标准件,以便更换方便设计方法液压反铲工作装置一般由动臂、斗杆、铲斗以及动臂油缸、斗杆油缸、擦干都油缸等组成。
其结构所示。
其结构特点是各构件之间均采用铰接连接,并通过改变各液压缸的行程来实现挖掘过程的各种动作。
工作装置的各个销轴采用合金钢制造,经渗碳淬火处理,强度较高。
且各个铰点都设有油杯,用油抢注入润滑脂润滑。
工作装置各铰点处均设有限位块,以减少对油缸的冲击。
斗齿部分由赤座和斗齿组成。
斗齿套在赤座上用弹性销固定,斗齿磨损后可以更换。
进度安排周次完成的主要任务周次完成的主要任务1 分组,确定题目9 各部分建模2 整体思路分析10 设计强度校核3 几何参数的确定11 设计强度的校核4 相关资料的收集12 整体执行机构的配合5 各系统工作状态参数的计算13 检查整体执行机构的合理性6 各系统工作状态参数的确定14 整理设计计算说明书7 各系统强度分析15 整理设计计算说明书,答辩8 各部分建模16 提交厦工XG804履带式小型液压挖掘机厦工XG804履带式小型液压挖掘机实物图液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的土方机械。
毕业设计(论文)题目:液压挖掘机反铲工作装置设计学院:航空制造工程学院专业名称:机械设计制造及其自动化班级学号: 08031717学生姓名:指导教师:二O一二年六月1液压挖掘机反铲装置设计液压挖掘机是一种重要的工程机械,它的广泛应用对于减轻劳动量,保证工程质量,加快工程进度,提高劳动生产率起了巨大的作用。
反铲工作装置由动臂,斗杆,动臂液压缸,斗杆液压缸和铲斗液压缸组成。
本文根据液压挖掘机反铲装置的结构特点和工作原理,对其各主要机构进行了运动学分析。
并在此基础上,根据设计说明书的设计要求,结合各机构的工作特点和设计要求,在对各机构分析计算的同时,结合构件已知尺寸参数,算出各机构中构件的其它参数,为各构件的结构设计提供数据支撑。
挖掘力是衡量挖掘机挖掘能力的重要参数。
挖掘力是由各液压缸中的油液压力提供的,是主动力。
最大挖掘力的实现受诸多因素的制约,它是工作装置各铰点受力分析的基础。
挖掘阻力不仅与铲斗的尺寸形状有关,还与挖掘对象有关,是两者的综合反映。
关键词: 液压挖掘机 反铲装置 运动分析 参数设计 力学分析指导老师签名:The Design for Backhoe Equipmentof the Hydraulic ExcavatorStudent name : Dong Chen xi Class: 080317Supervisor: Xing PuAbstract: Hydraulic excavator is an important engineering machinery. Its wide application played a tremendous role to reducing the volume of labor and to ensuring project quality and to accelerating progress and to increasing productivity. Backhoe working devices is made up of a moving arm and a fighting pole and shovel and a hydraulic tank of moving arm and a hydraulic tank of fighting pole and a hydraulic tank of shovel.Based on the hydraulic excavator backhoe device characteristics and the structure of principle , to all the major institutions of the kinematic analysis . On this basis , in accordance with the design specification design requirements , with the bodies of the characteristics and design requirements , in terms of the various agencies at the same time , combining elements of known size parameters , calculated in the component agencies of other parameters , for various components , The shape of design data support.Mining is a measure of the ability of excavators digging the important parameters. Mining is done by the hydraulic cylinder of the pressure on the oil , is initiative , the largest excavation of the realization by many factors , it is also working device to hinge point Analysis of the foundation . Mining resistance not only reflect the size of bucket shape , but also with the excavation of the object , is a comprehensive reflection of the two.Keyword:hydraulic excavator backhoe device motion analysis design parameters mechanicalSignature of Supervisor:2目录1 前言1.1 课题背景及目的 (1)1.2 国内外研究状况 (1)1.3 论文构成及研究内容 (3)2 挖掘机工作装置的总体设计2.1 工作装置构成 (4)2.2 动臂及斗杆的结构形式 (5)2.3 动臂油缸与铲斗油缸的布置 (6)2.4 铲斗与铲斗油缸的连接方式 (6)2.5 铲斗的结构选择 (7)2.6 原始几何参数的确定 (8)3 挖掘机的工作装置详细的机构运动学分析3.1 动臂运动分析 (11)3.2 斗杆的运动分析 (12)3.3 铲斗的运动分析 (13)3.3.1铲斗的传动比 (13)3.3.2最大卸载高度 (15)3.3.3最大挖掘半径 (16)4 工作装置各部分的基本尺寸计算和验证4.1 铲斗各参数的确定 (17)4.1.1铲斗结构形状的设计及基本要求 (17)4.1.2铲斗主要参数的确定 (17)4.2 动臂机构参数的确定 (18)4.3 斗杆机构基本参数的选择 (20)4.4 铲斗机构基本参数的选择 (21)4.4.1转角范围 (21)4.4.2铲斗机构其它基本参数的计算 (21)5 工作装置结构设计5.1 挖掘阻力分析 (23)5.1.1转斗挖掘阻力计算 (23)5.1.2斗杆挖掘阻力计算 (24)5.2 斗杆的结构设计 (25)5.2.1斗杆的受力分析 (25)5.2.2结构尺寸的计算 (30)5.3 动臂结构设计 (32)5.3.1第一工况位置 (33)15.3.2第二工况位置 (36)5.3.3内力图和弯矩图的求解 (39)5.4 铲斗的设计 (43)5.4.1铲斗斗形尺寸的设计 (43)5.4.2铲斗斗齿的结构计算 (44)5.5 挖掘机工作装置油缸推力 (44)5.5.1铲斗油缸推力 (44)5.5.2斗杆油缸推力 (45)5.5.3动臂油缸推力 (45)5.6 销轴与衬套的设计 (46)5.6.1销轴的设计 (46)5.6.2销轴用螺栓的设计 (46)5.6.3衬套的设计 (46)6 结论参考文献 (48)致谢 (49)附录:三维建模,装配截图 (50)2液压挖掘机反铲装置设计1前言1.1课题背景及目的液压挖掘机是一种重要的工程机械,广泛应用于工业与民用建筑、交通运输、水利电气工程、农田改造、矿山采掘以及现代化军事工程等行业的机械化施工中,对减轻繁重的体力劳动、保证工程质量、加快建设速度、提高劳动生产率起着十分巨大的作用。
太原科技大学本科毕业设计说明书XG765挖掘装载机的三维建模Three-dimensional modeling XG765 backhoe loader学院(系):专业:学生姓名:学号:指导教师:评阅老师:完成日期:太原科技大学Taiyuan University of Science and TechnologyXG765挖掘装载机的三维建模太原科技大学毕业设计(论文)任务书学院(直属系):机械工程学院时间: 14年 6月 10日学生姓名指导教师设计(论文)题目XG765挖掘装载机的三维建模主要研究内容1.测绘XG765挖掘装载机整机数据,确定各关键铰接点位置;2.确定各工作油缸的缸数、缸径、杆径、长度参数;3.利用Pro-E工程软件对挖掘机各零部件进行三维建模;4.利用Pro-E组件模块对挖掘机各零部件进行装配;5.利用Pro-E应用程序机构模块对三维模型添加电机进行运动分析;6.绘制工作装置装配图及零部件结构图;7.完成设计说明书。
8.翻译3000字以上的相关外文文献。
研究方法1.在教师指导下独立承担相关设计内容;2.通过查阅和分析近年来国内外相关文献及技术资料,参考现有机型进行方案选型并确定主要结构参数;3.通过所学专业基础知识及专业知识利用Pro-E工程软件设计;4.可借助于CAD方法绘制工程图纸并完成设计说明书。
主要技术指标(或研究目标)要求按时全面完成规定的设计内容;步骤翔实可信、方案正确、结构合理可行、工艺性好;所绘制的装配图和零部件图内容完整,符合国家标准及行业规范,达到工程实用要求;对所翻译的外文文献要求内容完整、表达准确、文字通顺。
主要参考文献1.同济大学主编.单斗液压挖掘机.北京:中国建筑工业出版社,1986,12 2.同济大学刘希平主编.工程机械构造图册.北京:机械工业出版社,1987,123. 张玉川主编.进口液压挖掘机国产化改造[M].成都:西南交通大学出版社1999,34.成大先主编.机械设计手册[M].北京:化学工业出版社,1987年报2月5. 颜荣庆等编著.现代工程机械液压与液力系统[M].北京:人民交通出版社,2001年4月说明:一式两份,一份装订入学生毕业设计(论文)内,一份交学院(直属系)。
第6期(总第163期)2010年12月机械工程与自动化M ECHA N ICAL EN GI NEER IN G & AU T O M A T IO N N o.6Dec.文章编号:1672-6413(2010)06-0072-02液压挖掘机的三维实体造型以及运动学仿真李 琴(攀枝花学院先进制造技术研究所,四川 攀枝花 617000)摘要:通过P ro /E 建立了液压挖掘机工作装置的三维实体模型,并用专用接口M echpro 2005将模型导入A DA M S 中进行运动学仿真,得到了挖掘机空载时关键位置点的位移、速度和加速度,为挖掘机的优化设计以及性能分析提供了参考。
关键词:虚拟样机;液压挖掘机;运动仿真中图分类号:T U 621∶T P391.9 文献标识码:A收稿日期:2010-05-10;修回日期:2010-07-23作者简介:李琴(1977-),女,四川成都人,讲师,硕士。
0 引言液压挖掘机作为工程机械的主要机种之一,广泛应用于工业与民用建筑、交通运输、水利电力工程、矿山采掘等机械化施工中。
而对液压挖掘机的设计,传统方法是设计-样机制造-试验,不但设计周期长、成本高,且试验破坏性较大,有时甚至可能会造成重大事故。
利用三维实体建模与动态仿真技术相结合,预先建立起实体仿真模型,模拟其动态特性,让设计者尽早发现问题并及时修改和优化,这样既能缩短产品的设计周期、提高产品的可靠性,又能实现产品的优化设计。
1 挖掘机三维实体模型的建立本文以某单斗反铲液压挖掘机为例,建立实体模型。
在建立液压挖掘机虚拟样机时,根据研究对象、研究目的的不同可对系统的仿真模型进行简化处理,但机械系统和液压系统的仿真模型必不可少[1]。
按照是否存在相对运动(暂不考虑行走运动)将挖掘机划分为上部转台、下车、动臂、斗杆、铲斗、铲斗摇杆、铲斗连杆、动臂液压缸、动臂液压活塞杆、斗杆液压缸、斗杆液压活塞杆、铲斗液压缸、铲斗液压活塞杆共13个大运动部件。
α李 瑛文章编号:100328728(2000)0520830203铲运机工作机构三维建模思路李 瑛,冯茂林,方 湄(北京科技大学资源工程学院,北京 100083)摘 要:在总结产品模型发展过程的基础上,提出了应用H EL I X软件在微机上对铲运机工作机构进行三维建模的思路,总结了建立产品建模模型的特点。
关 键 词:产品模型;工作机构;三维建模中图分类号:T P391.72 文献标识码:A 引 言自70年代起,国内外学者已将CAD技术逐渐应用于矿山机械设计[1],特别是对装载机工作机构,四轴转向汽车起重机转向机构进行了集优化设计,运动分析,动力学分析,强度分析,动态仿真,交互式绘图为一体的设计,实现了从拟定初始方案直至技术设计、绘图全过程辅助功能,这项技术的特点是直观和形象化,它把图形显示功能和分析计算功能结合在一起,使分析,设计过程一目了然,只要使用者在计算机上建立起二维或三维机构模型,便可使用CAD软件进行各种分析、设计等,不仅操作简单,而且可以大大提高分析和计算的精度与效率,并可用终端输出有关数据、曲线、图纸等。
综合来看,对铲运机工作机构的CAD设计目前还停留在二维设计,而实体模型可提供三维形体的最完整的几何拓扑信息,它是先进的CAD技术,将它应用于铲运机工作机构的设计必将提高产品的设计质量和效率。
目前,CAD系统已发展到第三代系统,第三代CAD系统的核心技术即建模技术有了很大的发展,无论是线框结构几何模型、曲面几何模型、实体几何模型还是集成产品模型,都有各自的优势和特点。
基于特征、参数化、变量化建模技术已得到应用。
另外基于参数的实体造型系统已非常成熟。
设计者可利用参数化设计的特点,从设计要求开始制作模型,在设计的各个阶段都可以方便地通过修改参数和尺寸,自动修改模型,直到满意为止。
尽管如此,应用机械CAD对铲运机工作机构进行三维建模还需要解决一些关键问题。
(1)准确表达机构的几何关系、空间尺寸,检验机构运动轨迹和运动干涉。
某型军用挖掘机作业机构建模与视景仿真
王东;姬慧勇;唐建;崔俊琦;马玉皓
【期刊名称】《工兵装备研究》
【年(卷),期】2011(030)003
【摘要】通过对几种常用三维建模软件应用特点的分析,选择了相应的挖掘机作业视景仿真软、硬件开发环境;根据某型挖掘机训练工作实际,进行了挖掘机模拟器总体仿真模块设计;给出了挖掘机的铲斗、斗杆、大臂等机构建模方法,以及运土车和作业空间视景的建模方法和三维视景仿真的实现方法.程序运行表明,该模拟器能够较好地模拟平时训练中的作业操作,视景画面逼真,具有良好的"沉浸感"与"交互性".【总页数】4页(P19-22)
【作者】王东;姬慧勇;唐建;崔俊琦;马玉皓
【作者单位】解放军理工大学工程兵工程学院,江苏南京210007;解放军理工大学工程兵工程学院,江苏南京210007;解放军理工大学工程兵工程学院,江苏南京210007;总装工程兵科研一所,江苏无锡214035;总装工程兵驻郑州地区军事代表室,河南郑州450051
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于Maplesim挖掘机机构建模与仿真分析
2.反铲式挖掘机执行机构的建模与仿真
3.疏浚作业仿真训练系统的虚拟视景仿真建模技术
4.基于AMESim的中型挖掘机执行机构液压系统建模与仿真
5.军用物资装卸搬运作业系统建模与仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
太原科技大学本科毕业设计XG804履带式液压挖掘机三维建模XG804 tracked excavator 3D modeling学院(系):机械工程专业:机械设计制造及其自动化(工机)学生姓名:武慧杰学号:201012030418指导教师:李捷评阅教师:完成日期:太原科技大学Taiyuan University of Science and Technology太原科技大学毕业设计(论文)任务书学院(直属系):机械工程学院时间: 14年 6月 10日摘要挖掘机械是工程机械的一种类型,是土石方开挖的主要机械设备,单斗液压挖掘机是一种采用液压传动并以铲斗进行挖掘作业的机械,液压挖掘机的工作装置常用的有反铲,正铲,装载,抓斗和起重装置。
本次设计主要是设计XG804履带式液压挖掘机整机的三维建模。
主要对工作装置机构的几何参数进行设计,通过对实物机型进行测绘,然后基于Pro-e、AutoCAD等工程绘图软件对挖掘机各零部件进行绘图、三维建模、整机装配等,对挖掘机进行运动分析,挖掘机各种工作状态以三维图的方式进行教学演示等。
在设计中应注意工作装置设计原则,在各部件满足实物要求的条件下实现各零部件无干涉有效装配,完成各工况下运动拟合演示等功能。
关键字:挖掘机,三维建模,Pro-e,运动分析,教学演示XG804 tracked excavator 3D modelingAbstractShovel machinery is a major type of construction Machinery, which is major earth excavation equipment. Single Bucket Hydraulic shovel is a mechanical which reliance on hydraulic transmission with the bucket to carry out excavation work. Hydraulic shovel working device are commonly backhoe, hoe, loading, grab and lifting gear.This design is mainly 3D modeling design of XG804 hydraulic crawler excavator. Geometric parameters on the working mechanism of the main design, through the mapping of physical models, and then the Pro-e, AutoCAD and other engineering drawing software based on excavator parts for drawing, three-dimensional modeling, assembly, motion analysis was carried out on the excavator, excavator to various working states of three-dimensional map of the ways of teaching demo.In the design should pay attention to the working device design principle, meet the real requirements under the conditions of the parts without interference in effective assembly components, completed under the condition of motion fitting demonstration function.Keyword:Excavator;3D modeling;Pro-e;Motion analysis;Teaching demonstration目录任务书 (I)摘要.............................................. 错误!未定义书签。
Abstract (III)绪论 (3)1.1 前言 (3)1.2 课题设计要求 (3)1.3 液压挖掘机国外研究状况及发展前景 (4)1.4 液压挖掘机国内研究状况及发展前景 (5)2 Pro-e运用软件 (8)2.1 引言 (8)2.2 Pro-e软件介绍 (8)2.3 设计及过程 (9)3 动臂建模 (11)3.1 动臂数据测绘 (11)3.2 动臂建模过程 (11)3.3 动臂建模总结 (12)4 斗杆建模 (13)4.1 斗杆数据测绘 (13)4.2 斗杆的建模过程 (13)4.3 斗杆建模总结 (14)5 铲斗建模 (15)5.1 铲斗数据测绘 (15)5.2 铲斗的建模过程 (15)6 油缸建模 (17)6.1 油缸数据测绘 (17)6.2 油缸的建模过程 (17)7 其他部件建模 (19)7.1 推土铲建模 (19)7.2 箱体建模 (19)7.3 底盘建模 (20)7.4 履带建模 (21)7.5 其他零部件建模 (22)8 整机装配 (24)8.1 油缸的装配过程 (24)8.2 工作装置的装配过程 (24)8.3 整机部件装配过程 (25)8.4 整机运动分析建立 (26)9 工作装置包络图的绘制 (27)9.1 挖掘包络图 (27)9.2 挖掘图的意义 (27)9.3 包络图的绘制 (27)全文总结 (30)参考文献 (31)致谢 (32)附录 (33)引言挖掘机的发展史可追溯到 19 世纪三四十年代。
美国实施西部大开发工程催生了以蒸汽机作为动力,模仿人体大臂、小臂和手腕构造,能行走和扭腰的挖掘机。
随后的一百多年中,挖掘机并没有得到很大发展,其原因一是当时的工程主要是国土开发、大规模的筑路和整修场地等,平面作业较多,使铲土运输机械成为当时的主力机种,二是挖掘机作业装置动作多、运动范围大、采用多自由度机构,机械传动难以适应这些要求,而当时的液压技术还不成熟,不能大规模地应用到实际工业中。
随着社会的不断进步,工程建设和施工形式逐渐向土木施工方向发展,同时液压技术也逐步得以完善,这些因素的变化反过来又促进挖掘机的不断更新换代。
20 世纪 40 年代有了在拖拉机上配装液压铲的悬挂式挖掘机,50年代初期和中期相继研制出拖式全回转液压挖掘机和履带式全液压挖掘机,60 年代,当液压传动技术成为成熟的传动技术时,液压挖掘机进入了推广和蓬勃发展吉阶段,各国挖掘机制造厂和品种增加很快(见表 1—1),产量猛增。
1968~1970年间液压挖掘机产量已占挖掘机总产量的 83%,目前已接近 100%,所谓挖掘机在现代主要是指液压挖掘机,机械式挖掘机已很少见,液压传动技术为挖掘机的发展提供了强有力的技术支撑。
随着我国液压挖掘机行业国外先进技术的引进和国产液压挖掘机产品的增加和性能水平的提高,开始全面淘汰已生产多年的落后、笨重的中、小型机械式挖掘机。
纵观我国液压挖掘机近40年的发展历史,大致可以分成以下几个阶段:(1)开发阶段(1967-1977年):以测绘仿制为主的开发。
通过多年坚持不懈的努力,克服一个一个的困难,有少量几种规格的液压挖掘机终于获得初步成功,为我国挖掘机行业的形成和发展迈出了重要的一步。
(2)液压挖掘机发展、提高并全面替代机械挖掘机阶段(1978-1986年)。
这个阶段通过各主机厂引进技术(主要是德国挖掘机制造技术)的消化、吸收和移植,使我国液压挖掘机产品的性能指标全面提高到国际70年代末80年代初的水平。
全国液压挖掘机的平均年产量达到1230台。
(3)液压挖掘机生产企业数量增加,新加入挖掘机行业的国有大、中型企业以技贸结合、合作生产方式联合引进日本挖掘机制造技术(1987-1993年)。
由于国内对挖掘机的需求量的不断提高,新加入挖掘机行业的企业通过开发和引进挖掘机制造技术,其产品批量或小批量的投放国内市场或出口,打破了多年来主要由六大家挖掘机生产企业垄断国内挖掘机市场的局面,形成了有益于提高产品质量、性能和产量的良性竞争。
这个期间国内液压挖掘机的年均产量提高到2000余台。
(4)国内液压挖掘机供需矛盾日益扩大,国外各著名挖掘机制造厂商看好中国市场纷纷前来创办合资、独资挖掘机生产企业(1994年--至今)。
从1994年开始,特别到1995年在我国挖掘机行业掀起了一股不小的合资浪潮。
其中美国卡特彼勒公司和日本神户制钢所率先在徐州金山桥开发区和与成都工程集团公司合作在成都相继建立了生产液压挖掘机的中外合资企业,随后日本小松制作所、日立建机株式会社、韩国大宇重工、韩国现代重工业以及德国利勃海尔、德国雪孚、德国Atlas、瑞典Volvo公司等都先后在中国建立了中外合资、外商独资挖掘机生产企业,生产具有世界先进水平的多种型号和规格的液压挖掘机产品。
近几年这些企业运营情况良好,发展速度很快。
我国是一个发展中国家,在其辽阔的土地上正在进行大规模的经济建设,这就需要大量的土石方施工机械为其服务,而液压挖掘机是最重要的一类土石方施工机械,因此在中国存在着一个巨大的液压挖掘机现实市场和更为巨大的液压挖掘机潜在市场。
随着国家经济建设的不断发展,对液压挖掘机的需求量将逐年大幅度增加。
在这里,我们还清楚地看到,中国广大挖掘机用户对液压挖掘机的要求越来越高。
以高性能价格比作为选择机型的一个重要参数,来获取最大的经济效益和社会效益。
总之,中国挖掘机市场将持续呈波浪型发展,从科学的发展观来看,要摒弃一切脱离实际的超前。
1绪论1.1 前言液压挖掘机是一种多功能机械,目前被广泛应用于水利工程,交通运输,电力工程和矿山采掘等机械施工中,它在减轻繁重的体力劳动,保证工程质量。
加快建设速度以及提高劳动生产率方面起着十分重要的作用。
由于液压挖掘机具有多品种,多功能,高质量及高效率等特点,因此受到了广大施工作业单位的青睐液压挖掘机的生产制造业也日益蓬勃发展。
所以,液压挖掘机作为工程机械的一个重要品种,对于减轻工人繁重的体力劳动,提高施工机械化水平,加快施工进度,促进各项建设事业的发展,都起着很大的作用,因此,大力发展液压挖掘机,对于提高劳动生产率和加速国民经济的发展具有重要意义。
1.2 课题设计要求1.2.1 使用要求中小型挖掘机主要用于城市、狭窄地区,代替人力劳动。
主要作业是挖掘、装载、整地、起重等,用于城市管道工程、道路、住宅建设、基础工程和园林作业等。