2011-第6章 有限元法-1介绍
- 格式:ppt
- 大小:969.00 KB
- 文档页数:54
第一章有限元法概述第一节有限元法的发展及基本思想随着现代工业、生产技术的发展,不断要求设计高质量、高水平的大型、复杂和精密的机械及工程结构。
为此目的,人们必须预先通过有效的计算手段,确切地预测即将诞生的机械和工程结构,在未来工作时所发生的应力、应变和位移。
但是传统的一些方法往往难以完成对工程实际问题的有效分析。
弹性力学的经典理论,由于求解偏微分方程边值问题的困难,只能解决结构形状和承受载荷较简单的问题,对于几何形状复杂、不规则边界、有裂缝或厚度突变,以及几何非线性、材料非线性等问题往往遇到很多麻烦,试图按经典的弹性力学方法获得解析解是十分困难的,甚至是不可能的。
因此,需要寻求一种简单而又精确的数值分析方法。
有限元法正是适应这种要求而产生和发展起来的一种十分有效的数值计算方法。
这个方法起源于20世纪50年代中期航空工程中飞机结构的矩阵分析。
1960年美国的克劳夫(C l o u g h)采用此方法进行飞机结构分析时,首次将这种方法起名为“有限单元法”(finite element method),简称“有限元法”。
有限单元法的基本思想,是在力学模型上将一个原来连续的物体离散成为有限个具有一定大小的单元,这些单元仅在有限个节点上相连接,并在节点上引进等效力以代替实际作用于单元上的外力。
对于每个单元,根据分块近似的思想,选择一种简单的函数来表示单元内位移的分布规律,并按弹性理论中的能量原理(或用变分原理)建立单元节点力和节点位移之间的关系。
最后,把所有单元的这种关系式集合起来,就得到一组以节点位移为未知量的代数方程组,解这些方程组就可以求出物体上有限个离散节点上的位移。
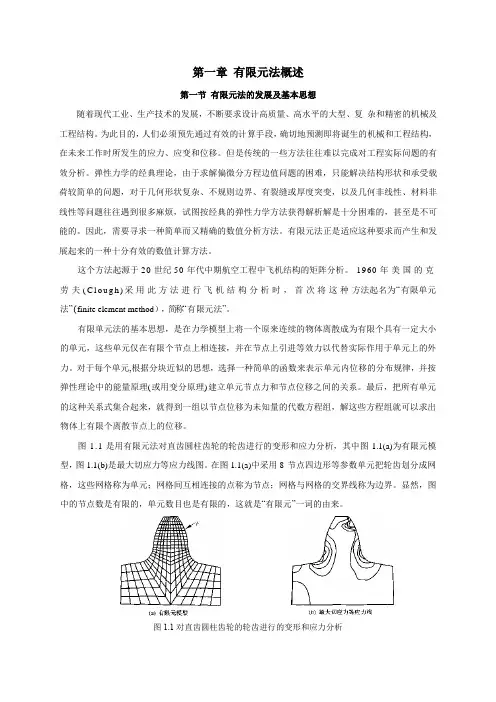
图1.1是用有限元法对直齿圆柱齿轮的轮齿进行的变形和应力分析,其中图1.1(a)为有限元模型,图1.1(b)是最大切应力等应力线图。
在图1.1(a)中采用8节点四边形等参数单元把轮齿划分成网格,这些网格称为单元;网格间互相连接的点称为节点;网格与网格的交界线称为边界。
有限元法第一章绪论1.有限元法的定义:有限元法是近似求解一般连续场问题的数值方法。
2.有限元法的特点:A物理概念清晰。
B复杂的结构适应性。
C各种物理问题的适用性。
D适合计算机实现的高效性。
3.有限元法的基本思想:首先,将表示结构的连续体离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示全求解域内待求的未知场变量。
每个单元内的近似函数用未知场变量函数在单元各个节点上的数值和与其对应的插值函数表示。
最后,通过和原问题数学模型等效的变分原理或加权余量法,建立求解基本未知量的代数方程组或常微分方程组,应用数值方法求解,从而得到问题的解答。
4.有限元法的基本步骤:从选择未知量的角度有限元法分为三类:位移法、力法和混合法。
位移法求解步骤:A结构的离散化。
B单元分析。
C单元集成。
D引入约束条件,求解线性方程组,得出节点位移。
E由节点位移计算单元的应力与应变。
5.有限元法的优缺点:优点:a有限元法可以模拟各种几何形状复杂的结构,得出其近似解。
B有限元法的解题步骤可以系统化、标准化,能够开发出灵活通用的计算机程序,使其能够广泛地应用于各种场合。
c 边界条件是在建立结构总体刚度方程后再引入的,边界条件和结构模型具有相对独立性,可以从其他CAD 软件中导入创建好的模型。
有限元法不需要适用于整个结构的插值函数,而是每个单元本身有各自的插值函数。
这就使得数学处理比较方便,对复杂形状的结构也能适用。
e有限元法很容易处理非均匀连续介质,可以求解非线性问题和进行耦合场分析。
F有限元法可以与优化设计方法相结合,以便发挥各自的优点。
缺点:a有限单元对于复杂问题的分析计算所耗费的计算资源是相当惊人的。
b对无限求解域问题没有较好的处理方法。
c有限元软件在具体应用时需依赖使用者的经验,而且在精度分析时需耗费相当大的计算资源。
6.屈曲:载荷的大小超过一定的数值,变形的形状与此之前变形的形状发生了不同的变化,从而承担载荷的能力减少了,把这一现象称为屈曲。


第六章 有限元法概述第一节 单元分析简例1、单元分析的主要任务:求出单元节点位移和节点力之间的转换关系。
在推导此关系时规定:力和位移的方向若和坐标轴正方向一致者为正。
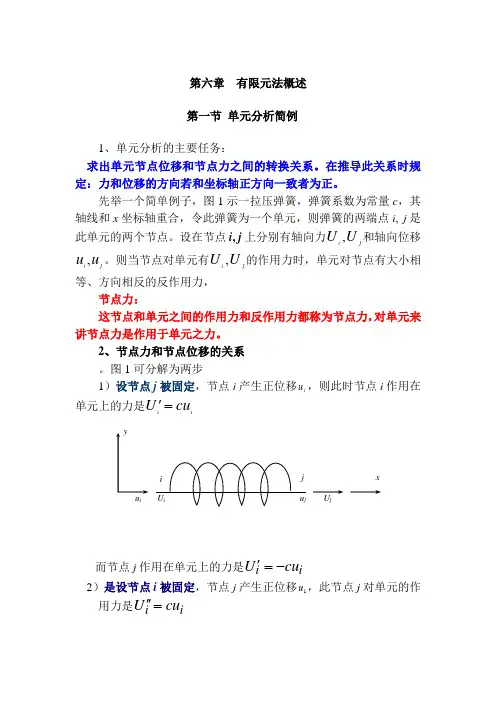
先举一个简单例子,图1示一拉压弹簧,弹簧系数为常量c ,其轴线和x 坐标轴重合,令此弹簧为一个单元,则弹簧的两端点i , j 是此单元的两个节点。
设在节点i , j 上分别有轴向力j i U U ,和轴向位移jiu u ,。
则当节点对单元有jiU U ,的作用力时,单元对节点有大小相等、方向相反的反作用力,节点力:这节点和单元之间的作用力和反作用力都称为节点力,对单元来讲节点力是作用于单元之力。
2、节点力和节点位移的关系 。
图1可分解为两步1)设节点j 被固定,节点i 产生正位移i u ,则此时节点i 作用在单元上的力是i i cu U ='而节点j 作用在单元上的力是i i cu U -='2)是设节点i 被固定,节点j 产生正位移1u ,此节点j 对单元的作用力是i i cu U =''i U iu iyj u jU jx节点i 对单元的作用力是iicu U -=''将两式合并,就得到⎪⎩⎪⎨⎧+-=''+'=-=''+'=ji j j i ji i i i cu cu U U U cu cu U U U 由式可以看出一个节点上的节点力不仅决定于本节点的位移,而且也决定于本单元其他节点的位移。
设以{}eF 表示单元节点力向量:{}⎭⎬⎫⎩⎨⎧=j i eU U F 以{}eδ表示节点位移向量:{}⎭⎬⎫⎩⎨⎧=j i eu u δ 则式(1.1)可改写成:{}{}eek F δ][=式中⎥⎦⎤⎢⎣⎡---=c c c c k ][式中(1.2)就是单元节点位移{}eδ和节点力{}eF 之间的转换关系。
][k 是转换矩阵,称为单元刚度矩阵。
第六章 动力问题的有限元法6.1 概述前面几章所研究的问题都属于静力问题,其特点是施加到结构上的外载荷不会使结构产生加速度,且外载荷的大小和方向不随时间变化,因而结构所产生的位移和应力也不随时间变化。
本章将要研究结构分析中另一类重要问题的有限元解法,即动力问题的有限元解法。
动力学问题的特点是,载荷是随时间变化的,因而结构所产生的位移和应力是时间的函数,结构会产生速度和加速度。
由于结构本身的弹性和惯性,结构在动力载荷的作用下,往往呈现出振动的运动形态。
结构振动是工程中一个很普遍很重要的问题。
有些振动对我们有利,例如,振动打桩,振动选料,有些振动对我们有害,例如,机床的振动,仪器与仪表的振动,桥梁、水坝及高层建筑在地震作用下的振动等。
因此,我们必须对振动体本身的振动特性以及它对外部激振力的响应有一个明确的认识,才能更好地利用它有利的一面,而避免它有害的一面,设计出更好的机械和结构。
振动问题主要解决两方面的问题。
1. 寻求结构的固有频率和主振型,从而了解结构的固有振动特性,以便更好地利用或减少振动。
2. 分析结构的动力响应特性,以计算结构振动时动应力和动位移的大小及其变化规律。
6.2 结构的振动方程结构的振动方程可用多种方法建立,这里我们使用达朗伯原理(动静法),仿照前几章建立静力有限元方程的方法,来建立动力问题的有限元方程。
在静力问题中用有限元法建立的平衡方程是}{}]{[F K =δ在振动问题中,对结构的各节点应用达郎伯原理所建立的振动方程仍然具有与上式相同的形式,只不过节点位移是动位移,节点载荷是动载荷,它们都是时间的函数。
上面的方程成为)}({)}(]{[t Q t K =δ (6.1)上式中{})(t δ为节点的动位移,它是时间的函数,)}(]{[t K δ是t 时刻的节点位移产生的弹性恢复力,它与该时刻的节点外力{})(t Q 构成动态平衡。
在动态情况下,结构承受的载荷(集中载荷 ,分布载荷 )可随时间而变化,是时间的函数。