机械控制工程基础第3章习题解答
- 格式:ppt
- 大小:208.50 KB
- 文档页数:15
《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A。
反馈作用B。
前馈作用 C.正向作用 D.反向作用2。
闭环控制系统的主反馈取自(被控对象输出端).P3A。
给定输入端B。
干扰输入端 C.控制器输出端D。
系统输出端3。
闭环系统在其控制器和被控对象之间有(反向作用).P3A.反馈作用B。
前馈作用 C.正向作用 D.反向作用A。
输入量 B.输出量 C.反馈量D。
干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程).P2—3A。
偏差的过程B。
输入量的过程 C.干扰量的过程 D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A。
不稳定系统 B.稳定系统C。
时域系统D。
频域系统6。
闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D。
执行环节7。
闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D。
输出量局部反馈参与控制8。
随动系统要求系统的输出信号能跟随(C的变化)。
P6A。
反馈信号 B.干扰信号C。
输入信号 D.模拟信号9。
若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B。
主反馈C。
正反馈 D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A。
开环控制系统 B.闭环控制系统 C.反馈控制系统D。
非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A.。
给定元件B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B。
准确性 C. 稳定性 D.动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D。

一、单项选择题:1. 某二阶系统阻尼比为0,则系统阶跃响应为 DA. 发散振荡B. 单调衰减C. 衰减振荡D. 等幅振荡2. 一阶系统G(s)=1+Ts K的时间常数T 越小,则系统的输出响应达到稳态值的时间 BA .越长B .越短C .不变D .不定3. 传递函数反映了系统的动态性能,它与下列哪项因素有关? CA.输入信号B.初始条件C.系统的结构参数D.输入信号和初始条件4.惯性环节的相频特性)(ωθ,当∞→ω时,其相位移)(∞θ为 CA .-270°B .-180°C .-90°D .0° 5.设积分环节的传递函数为G(s)=s1,则其频率特性幅值M(ω)= C A.ωKB. 2K ωC. ω1D. 21ω6. 有一线性系统,其输入分别为u 1(t)和u 2(t)时,输出分别为y 1(t)和y 2(t)。
当输入为a 1u 1(t)+a 2u 2(t)时(a 1,a 2为常数),输出应为 BA. a 1y 1(t)+y 2(t)B. a 1y 1(t)+a 2y 2(t)C. a 1y 1(t)-a 2y 2(t)D. y 1(t)+a 2y 2(t)7.拉氏变换将时间函数变换成 DA .正弦函数B .单位阶跃函数C .单位脉冲函数D .复变函数8.二阶系统当0<ζ<1时,如果减小ζ,则输出响应的最大超调量%σ将 AA.增加B.减小C.不变D.不定9.线性定常系统的传递函数,是在零初始条件下 DA .系统输出信号与输入信号之比B .系统输入信号与输出信号之比C .系统输入信号的拉氏变换与输出信号的拉氏变换之比D .系统输出信号的拉氏变换与输入信号的拉氏变换之比10.余弦函数cos t ω的拉氏变换是 CA.ω+s 1B.22s ω+ω C.22s s ω+ D. 22s 1ω+ 11. 微分环节的频率特性相位移θ(ω)= AA. 90°B. -90°C. 0°D. -180°12. II 型系统开环对数幅频渐近特性的低频段斜率为 AA. -40(dB/dec)B. -20(dB/dec)C. 0(dB/dec)D. +20(dB/dec)13.令线性定常系统传递函数的分母多项式为零,则可得到系统的 BA .代数方程B .特征方程C .差分方程D .状态方程14. 主导极点的特点是 DA.距离实轴很远B.距离实轴很近C.距离虚轴很远D.距离虚轴很近15.采用负反馈连接时,如前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则其等效传递函数为 CA .)s (G 1)s (G + B .)s (H )s (G 11+C .)s (H )s (G 1)s (G + D .)s (H )s (G 1)s (G -二、填空题:1.线性定常系统在正弦信号输入时,稳态输出与输入的相位移随频率而变化的函数关系称为__ 相频特性 __。

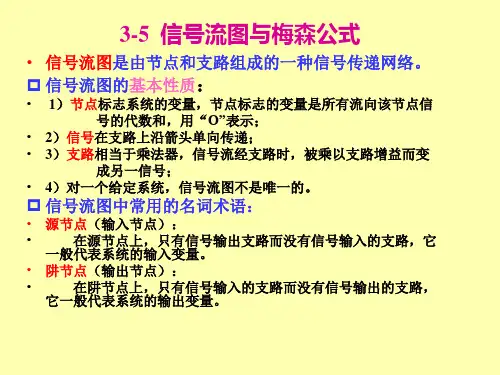
机械工程控制基础目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
封面作者:Pan Hongliang仅供个人学习目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
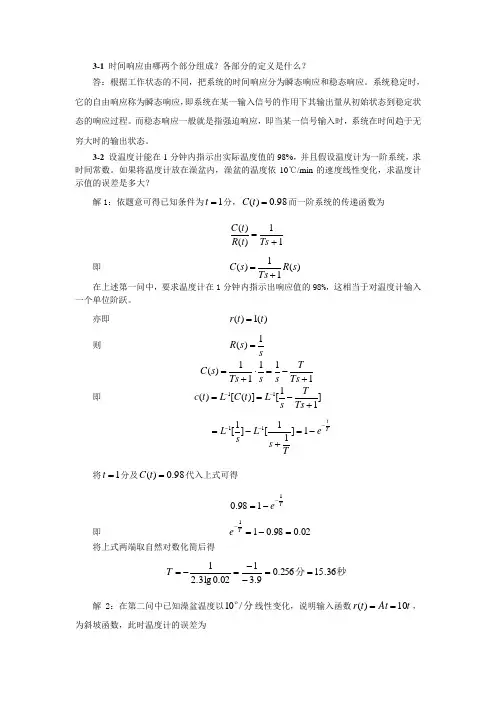
3-1 时间响应由哪两个部分组成?各部分的定义是什么?答:根据工作状态的不同,把系统的时间响应分为瞬态响应和稳态响应。
系统稳定时,它的自由响应称为瞬态响应,即系统在某一输入信号的作用下其输出量从初始状态到稳定状态的响应过程。
而稳态响应一般就是指强迫响应,即当某一信号输入时,系统在时间趋于无穷大时的输出状态。
3-2 设温度计能在1分钟内指示出实际温度值的98%,并且假设温度计为一阶系统,求时间常数。
如果将温度计放在澡盆内,澡盆的温度依10℃/min 的速度线性变化,求温度计示值的误差是多大?解1:依题意可得已知条件为1=t 分,98.0)(=t C 而一阶系统的传递函数为11)()(+=Ts t R t C即 )(11)(s R Ts s C +=在上述第一问中,要求温度计在1分钟内指示出响应值的98%,这相当于对温度计输入一个单位阶跃。
亦即 )(1)(t t r = 则 s s R 1)(=11111)(+-=⋅+=Ts T s sTs s C即 ]11[)]([)(11+-==--Ts T sL t C L t cTt eTs L sL ----=+-=1]11[]1[11将1=t 分及98.0)(=t C 代入上式可得Te 1198.0--=即 02.098.011=-=-Te将上式两端取自然对数化简后得秒分36.15256.09.3102.0lg 3.21==--=-=T解2:在第二问中已知澡盆温度以分/10线性变化,说明输入函数t At t r 10)(==,为斜坡函数,此时温度计的误差为)()()()(t c At t c t r t e -=-=而当 At t r =)( 时2)(sA s R =即 ]11[11)(11)(222++-=⋅+=+=Ts Ts T sA sATs s R Ts s C则 ]11[)()(211211++-==----Ts TLs T LsLA s C L t C)(]1111[1121Tt TeT t A Ts TLsTLsLA ----+-=++-=即 )1()()(Tt Tt eAT TeT t A At t e ---=+--=将已知和已求得之值数1=t 分、256.0=t 分、10=A 代入上式即可求得温度计的误差为)(53.298.0256.010)(上式为近似计算=⨯⨯=t e 。
《机械控制工程基础》作业集层次:高起专授课教师:王军平时间:2014年3月31日《机械控制工程基础》目录第一章绪论第二章拉普拉斯变换的数学方法第三章系统的数学模型第四章控制系统的时域分析第五章系统的频率特性第六章系统的稳定性第一章绪论本章重点:1.控制系统的组成及基本要求;本章难点分析系统的控制原理。
题型-分析及问答题1、根据下图所示的电动机速度控制系统工作原理图,完成:(1) 将a,b与c,d用线连接成负反馈状态;(2) 画出系统方框图。
2、下图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
3、下图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
4、下图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器1P 、2P 并联后跨接到同一电源0E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
5、采用离心调速器的蒸汽机转速控制系统如下图所示。
其工作原理是:当蒸汽机带动负载转动的同时,通过圆锥齿轮带动一对飞锤作水平旋转。
飞锤通过铰链可带动套筒上下滑动,套筒内装有平衡弹簧,套筒上下滑动时可拨动杠杆,杠杆另一端通过连杆调节供汽阀门的开度。
在蒸汽机正常运行时,飞锤旋转所产生的离心力与弹簧的反弹力相平衡,套筒保持某个高度,使阀门处于一个平衡位置。
如果由于负载增大使蒸汽机转速ω下降,则飞锤因离心力减小而使套筒向下滑动,并通过杠杆增大供汽阀门的开度,从而使蒸汽机的转速回升。
同理,如果由于负载减小使蒸汽机的转速ω增加,则飞锤因离心力增加而使套筒上滑,并通过杠杆减小供汽阀门的开度,迫使蒸汽机转速回落。
这样,离心调速器就能自动地抵制负载变化对转速的影响,使蒸汽机的转速ω保持在某个期望值附近。
祝守新邢英杰韩连英《机械工程控制基础》习题解答机械控制工程基础答案提示第二章系统的数学模型2-1试求如图2-35所示机械系统的作用力F(t)与位移y(t)之间微分方程和传递函数。
F(t)图2-35题2-1图解:依题意:d2ytadytmFtfkytdt2bdtd2ytdytafkytFt故m2dtbdtY传递函数:G2Fmfk2-2对于如图2-36所示系统,试求出作用力F1(t)到位移某2(t)的传递函数。
其中,f为粘性阻尼系数。
F2(t)到位移某1(t)的传递函数又是什么?图2-36题2-2图解:依题意:d2某1td某1td某2t对m1:F1k1某1tfm12dtdtdt对两边拉氏变换:F1k1某1f某1某2m12某1①d2某2td某1td某2t对m2:F2tfk2某2tm2dt2dtdt对两边拉氏变换:F2f某1某2k2某2m22某2②m12fk1某1f某2F1故:2f某1m2fk2某2F2SF1m22fk2fF2某12m12fk1m22fk2f故得:2fF1F2m1fk2某2222mfkmfkf1122故求F1t到某2t的传递函数令:F20某2fG1F1m12fk1m22fk2f2fm1m24fm1m23m1k2m2k12fk1k2k1k2求F2t到某1t的传递函数令:F10某1fG1F2m12fk1m22fk2f22-3试求图2-37所示无源网络传递函数。
fm1m24fm1m23m1k2m2k12fk1k2k1k2o图2-37题2-3图解(a)系统微分方程为i1tdti2tR1Cuii2tR1itR2u0itR2iti1ti2t拉氏变换得I1R1I2CUiI2R1I1R2U0I1R2II1I2R2R1C1U0R2CR11R1R2消去中间变量I1,I2,I得:GR1R2UiR1R2CR11C1R1R2(b)设各支路电流如图所示。
系统微分方程为uitR1i3tu0tR1i3tL11234di2tdtu0ti4tdtC2di5tdtu0tR2i6tu0tL25i2ti3ti4ti5ti6t6由(1)得:UiR1I3Uo由(2)得:R1I3L1I2由(3)得:Uo i4C2由(4)得:UoL2I5由(5)得:UoR2I6由(6)得:I2I3I4I5I6故消去中间变量I1,I2,I3,I4,I5,I6得:L2L1UL1o1L2R1UiL1L2LC2L1L2R1R2L2112L1L2R1R22-4证明Lcot22证明:设ftcot由微分定理有Ld2ft2Ff0f(1)0dt2由于f0co01,f0in00,d2ftdt22cot将式(2)各项带入式(1)中得L2cot2F即2F2F整理得F222-5求f(t)122t的拉氏变换。
已知系统框图如下,求该系统的闭环传递函数354254135425412111)()(G G G H G G H G G G H G G G G X X s G io B ⋅+⋅+⋅+⋅+==3541542354121)(G G G H G G H G G G G G ++⋅+=---------------------------------------------------------------------------------------------------------------------- 使用温度计对水温进行测量,若水温为恒定值,该温度计能在1分钟时指示出实际温度值的98%。
假定温度计为一个一阶系统,求该系统的时间常数T 。
解:恒定的水温可以视为一个阶跃输入信号,温度计的测量输出可以视为对该阶跃输入信号的响应。
一阶系统的单位阶跃响应的时间函数为:)0(1)(/>-=-t e t x T t o (P82,3.3.2) 根据题意可知:98.01)(/11=-=-=Tt o e t x→02.0/1=-T e →256.050ln 1==T (min) ---------------------------------------------------------------------------------------------------------------------- 下图为某数控机床系统的位置随动系统的方框图,试求:(1)阻尼比ξ及无阻尼固有频率n ω解:由图可知,该系统为一个单位反馈系统,其系统的闭环传递函数为:99)1(191)1(19)(1)()()(1)()(2++=+⋅++⋅=+=+=s s s s s s s G s G s H s G s G s G B 对比二阶系统传递函数的标准形式(P83,3.4.1)2222nn nsωξωω++可得该系统的阻尼比ξ及无阻尼固有频率n ω为:61,3==ξωn (2)该系统的p M ,p t ,s t ,N13611312≈-=-==πξωπωπn d p t (P90,3.4.15) %53%100%1003611/6121/≈⨯=⨯=----πξξπe eM p (P90,3.4.17)若令02.0=∆,84=≈ns t ξω(P91,3.4.22), 7.3122≈-=πξξN (P91,3.4.25)若令05.0=∆,63=≈ns t ξω(P91,3.4.23),8.215.12≈-=πξξN (P91,3.4.26)---------------------------------------------------------------------------------------------------------------------- 要使下图所示系统的单位阶跃响应的最大超调量等于25%,峰值时间p t 为2秒,试确定K 和f K 的值解:由图可知,该系统的闭环传递函数为:Ks K K s K s K sK s K s H s G s G s G f f B +⋅+=+⋅⋅+⋅=+=222)1(111)()(1)()( 对比二阶系统传递函数的标准形式2222nn n sωξωω++可得该系统的阻尼比ξ及无阻尼固有频率n ω为:2,KK K fn ==ξω由题意, 令:%2521/==--ξξπeM p ,即4ln 12=-ξξπ解得:4.0=ξ令:()24.01122=-=-==K t nd p πξωπωπ 解得:93.2=K再由:293.22f fK K K ==4.0=ξ 解得:467.0=f K----------------------------------------------------------------------------------------------------------------------单位反馈系统的开环传递函数为)10)(5(2)(+++=s s s K s G K 其输入为单位斜坡输入(单位恒速输入)时,系统的稳态误差02.0=ss e ,求所需的K 值 解:由于系统为单位反馈系统,其稳态偏差与稳态误差相同(P98,3.6.4),即ss ss e ε= 将)(s G K 写为标准形式)11.0)(12.0(50/)2()(+++=s s s K s G K (P100,3.6.12)当输入为单位斜坡输入时,其稳态偏差为:02.050/)2(1=+=K e ss (P101,P102,表3.6.1)求得所需的K 值为2498~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~·· 3.9 3.10 3.11 3.18。
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。