电动汽车传动公式
- 格式:doc
- 大小:228.50 KB
- 文档页数:4
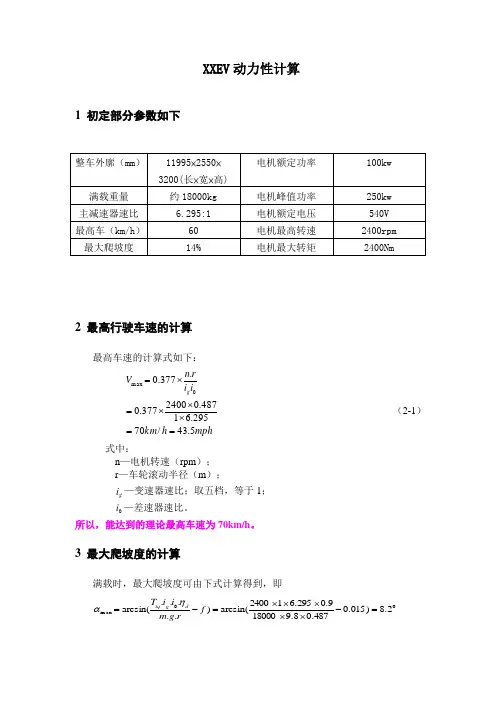
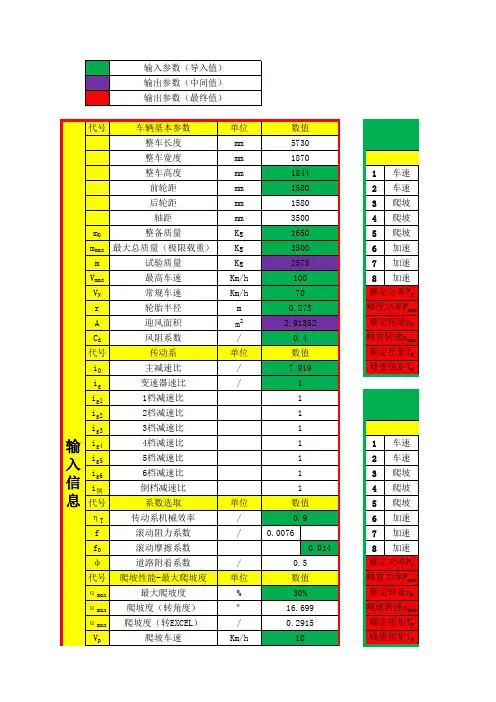
XXEV 动力性计算1 初定部分参数如下2 最高行驶车速的计算最高车速的计算式如下:mphh km i i rn V g 5.43/70295.61487.02400377.0.377.00max ==⨯⨯⨯=⨯= (2-1)式中:n —电机转速(rpm ); r —车轮滚动半径(m );g i —变速器速比;取五档,等于1;0i —差速器速比。
所以,能达到的理论最高车速为70km/h 。
3 最大爬坡度的计算满载时,最大爬坡度可由下式计算得到,即00max 2.8)015.0487.08.9180009.0295.612400arcsin().....arcsin(=-⨯⨯⨯⨯⨯=-=f rg m i i T dg tq ηα所以满载时最大爬坡度为tan(m ax α)*100%=14.4%>14%,满足规定要求。
4 电机功率的选型纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、最大爬坡度等动力性能的要求。
4.1 以最高设计车速确定电机额定功率当汽车以最高车速m ax V 匀速行驶时,电机所需提供的功率(kw )计算式为:max 2max ).15.21....(36001V V A C f g m P d n +=η (2-1)式中:η—整车动力传动系统效率η(包括主减速器和驱动电机及控制器的工作效率),取0.86;m —汽车满载质量,取18000kg ; g —重力加速度,取9.8m/s 2; f —滚动阻力系数,取0.016;d C —空气阻力系数,取0.6;A —电动汽车的迎风面积,取2.550×3.200=8.16m 2(原车宽*车身高);m ax V —最高车速,取70km/h 。
把以上相应的数据代入式(2-1)后,可求得该车以最高车速行驶时,电机所需提供的功率(kw ),即kw1005.8970)15.217016.86.0016.08.918000(86.036001).15.21....(360012max2max<kw V V A C f g m P D n =⨯⨯⨯+⨯⨯⨯=+•=η (3-2) 4.2满足以10km/h 的车速驶过14%坡度所需电机的峰值功率 将14%坡度转化为角度:018)14.0(tan ==-α。
纯电动汽车动力性计算公式XXEV 动力性计算1 初定部分参数如下整车外廓(mm ) 11995×2550×3200(长×宽×高) 电机额定功率100kw满载重量 约18000kg 电机峰值功率 250kw 主减速器速比 6.295:1 电机额定电压 540V 最高车(km/h ) 60 电机最高转速 2400rpm 最大爬坡度 14%电机最大转矩2400Nm2 最高行驶车速的计算最高车速的计算式如下:mphh km i i rn V g 5.43/70295.61487.02400377.0.377.00max ==⨯⨯⨯=⨯=(2-1)式中:n —电机转速(rpm ); r —车轮滚动半径(m );g i —变速器速比;取五档,等于1;0i —差速器速比。
所以,能达到的理论最高车速为70km/h 。
3 最大爬坡度的计算满载时,最大爬坡度可由下式计算得到,即00max 2.8)015.0487.08.9180009.0295.612400arcsin().....arcsin(=-⨯⨯⨯⨯⨯=-=f rg m i i T dg tq ηαkw 100w 5.8810)15.211016.86.08cos 016.08.9180008sin 8.918000(86.036001).15.21..cos ...sin ..(360012002max <k V V A C f g m g m P slopeslope D =⨯⨯⨯+⨯⨯⨯+⨯⨯⨯=++=ααη从以上动力性校核分析可知,所选100kw/540V 交流感应电机的功率符合所设计的动力性参数要求。
5 动力蓄电池组的校核5.1按功率需求来校核电池的个数 电池数量的选择需满足汽车行驶的功率要求,并且还需保证汽车在电池放电达到一定深度的情况下还能为汽车提供加速或爬坡的功率要求。
磷酸锂铁蓄电池的电压特性可表示为:bat bat bat bat I R U E .0+=(4-1)式中:bat E —电池的电动势(V ); bat U —电池的工作电压(V );0bat R —电池的等效内阻(Ω);bat I —电池的工作电流(A )。
新能源汽车传动系统的工作原理1. 传动系统的基本概念哎,说到新能源汽车,咱们首先得聊聊传动系统。
这东西就像车的“心脏”,负责把动力从电机传递到车轮。
想象一下,你骑着自行车,脚蹬得飞快,但车轮就是不转,那可就太尴尬了!新能源汽车的传动系统就负责确保这动力顺畅无阻,简直就是“无声的英雄”呀。
1.1 电机的“动力源泉”新能源汽车的动力来源于电机,这可是个神奇的家伙!电机通过电流产生磁场,进而让转子转动。
简单来说,就是电流在里面“舞蹈”,转子跟着它一起摇摆,哇,听起来是不是很有意思?而且,电机的转速可以调节,越快车子跑得越快,直接“飞”起来,让你体验到极速的快感,真是让人兴奋不已。
1.2 变速器的“调节器”接下来我们得聊聊变速器,别小看它哦!在传统汽车里,变速器就像一位指挥家,调节着各个乐器的音调。
而在新能源汽车中,变速器的角色有所不同。
很多电动车采用的是单速变速器,省去了换挡的烦恼。
你只需踩下油门,车子就像被施了魔法一样,瞬间加速,简直让人感觉自己是飞行员,飞向蓝天!2. 动力传递的“桥梁”传动系统的另一个重要组成部分就是动力传递部分,这可是个重要的“桥梁”!电机产生的动力通过传动系统的组件,像齿轮、轴承,最后到达车轮。
这个过程就像把一瓶可乐从冰箱里拿出来,倒进杯子,顺畅又畅快。
它需要确保动力传递的效率高,避免浪费,就像节约用水,才能让你享受更多的清凉。
2.1 轮毂电机的“新宠”说到这里,不得不提轮毂电机。
这玩意儿把电机直接装在轮子里,简直就是“黑科技”呀!这样一来,车子在加速和刹车时,反应速度贼快,仿佛在开飞船。
车子的重心也降低了,稳定性大大提升,简直是行驶时的“稳如老狗”!2.2 电子控制的“智能化”再来聊聊电子控制系统,这可是整个传动系统的“大脑”。
通过传感器和计算机,电子控制系统实时监测车辆的状态,精确调节电机的输出。
就像你在比赛时,教练一直在给你指导,确保你发挥得淋漓尽致。
这样一来,不仅能提高车辆的加速性能,还能在急刹时保证安全,真是一举两得!3. 节能环保的“先锋”新能源汽车的传动系统可不是单纯为了让你爽快开车,它还有个更大的使命,就是环保!相比传统燃油车,电动汽车的能耗更低,污染更少,简直是地球的“保护神”。
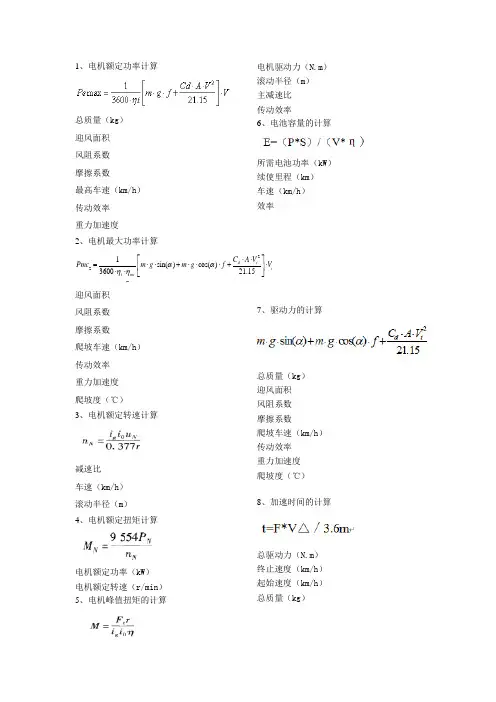
1、电机额定功率计算
总质量(kg ) 迎风面积 风阻系数 摩擦系数 最高车速(km/h ) 传动效率 重力加速度
2、电机最大功率计算
迎风面积 风阻系数 摩擦系数 爬坡车速(km/h ) 传动效率 重力加速度 爬坡度(℃) 3、电机额定转速计算
减速比 车速(km/h ) 滚动半径(m ) 4、电机额定扭矩计算
电机额定功率(kW ) 电机额定转速(r/min ) 5、电机峰值扭矩的计算
电机驱动力(N.m ) 滚动半径(m ) 主减速比 传动效率
6、电池容量的计算
所需电池功率(kW ) 续使里程(km ) 车速(km/h ) 效率
7、驱动力的计算
总质量(kg ) 迎风面积 风阻系数 摩擦系数 爬坡车速(km/h )
传动效率 重力加速度 爬坡度(℃)
8、加速时间的计算
总驱动力(N.m ) 终止速度(km/h ) 起始速度(km/h ) 总质量(kg )
2221
sin()cos()360021.150.756.6201175009.8sin()175009.8cos()0.009382036000.960.921.15d i i
t mc C A V Pmc m g m g f V ααηηαα⎡⎤⋅⋅=⋅⋅+⋅⋅⋅+⋅⎢⎥⋅⋅⎣⎦⎡⎤⋅⋅=⋅⋅+⋅⋅⋅+⋅⎢⎥⋅⋅⎣⎦。
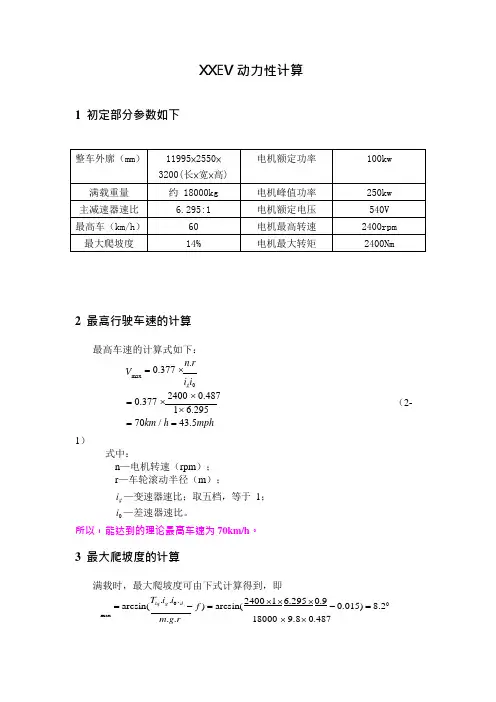
XXEV 动力性计算1初定部分参数如下整车外廓(mm)11995×2550×3200(长×宽×高)电机额定功率100kw 满载重量约 18000kg 电机峰值功率250kw 主减速器速比 6.295:1 电机额定电压540V 最高车(km/h)60 电机最高转速2400rpm 最大爬坡度14% 电机最大转矩2400Nm2最高行驶车速的计算最高车速的计算式如下:V max = 0.377 ⨯n.rigi= 0.377 ⨯2400 ⨯ 0.487 1⨯ 6.295= 70km / h = 43.5mph1)式中:n—电机转速(rpm);r—车轮滚动半径(m);ig—变速器速比;取五档,等于1;i 0 —差速器速比。
(2-所以,能达到的理论最高车速为70km/h。
3最大爬坡度的计算满载时,最大爬坡度可由下式计算得到,即=arcsin(T tq.i g.i0.d-f)=arcsin(2400⨯1⨯6.295⨯0.9-0.015)=8.20 max m.g.r18000 ⨯ 9.8⨯ 0.487所以满载时最大爬坡度为 t a n (max)*100%=14.4%>14%,满足规定要求。
4 电机功率的选型纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、最大爬坡度等动力性能的要求。
4.1 以最高设计车速确定电机额定功率当汽车以最高车速V max 匀速行驶时,电机所需提供的功率(kw )计算式为:1C .A .V 2 P n = (m .g . f 3600 + d max ).V 21.15max(2-1)式中:η—整车动力传动系统效率(包括主减速器和驱动电机及控制器的工作效 率),取 0.86;m —汽车满载质量,取 18000kg ; g —重力加速度,取 9.8m/s 2; f —滚动阻力系数,取 0.016; C d —空气阻力系数,取 0.6;A —电动汽车的迎风面积,取 2.550× 3.200=8.16m 2(原车宽*车身高);V max —最高车速,取 70km/h 。
实用文档汽车动力性设计计算公式3.1 动力性计算公式3.1.1 变速器各档的速度特性: 0377.0i i n r u gi ek ai ⨯⨯= ( km/h ) ......(1) 其中:k r 为车轮滚动半径,m;由经验公式:⎥⎦⎤⎢⎣⎡-+=)1(20254.0λb d r k (m)d----轮辋直径,inb----轮胎断面宽度,inλ---轮胎变形系数e n 为发动机转速,r/min ;0i 为后桥主减速速比;gi i 为变速箱各档速比,)...2,1(p i i =,p 为档位数,(以下同)。
3.1.2 各档牵引力 汽车的牵引力:错误!未指定书签。
t kgi a tq a ti r i i u T u F η⨯⨯⨯=)()(( N ) (2)其中:)(a tq u T 为对应不同转速(或车速)下发动机输出使用扭矩,N •m ;t η为传动效率。
汽车的空气阻力:15.212ad w u A C F ⨯⨯= ( N ) (3)其中:d C 为空气阻力系数,A 为汽车迎风面积,m 2。
汽车的滚动阻力:f G F a f ⨯= ( N ) ......(4) 其中:a G =mg 为满载或空载汽车总重(N),f 为滚动阻尼系数 汽车的行驶阻力之和r F :w f r F F F += ( N ) (5)注:可画出驱动力与行驶阻尼平衡图3.1.3 各档功率计算 汽车的发动机功率: 9549)()(ea tq a ei n u T u P ⨯=(kw ) (6)其中: )(a ei u P 为第)...2,1(p i i =档对应不同转速(或车速)下发动机的功率。
汽车的阻力功率:taw f r u F F P η3600)(+=(kw ) (7)3.1.4 各档动力因子计算awa ti a i G F u F u D -=)()( (8)各档额定车速按下式计算.377.0i i n r u i g c e k i c a = (km/h ) (9)其中:c e n 为发动机的最高转速;)(a i u D 为第)...2,1(p i i =档对应不同转速(或车速)下的动力因子。
详解电动汽车传动系统原理、传动方式及拓扑构架设计随着现代汽车电子技术的发展,新能源汽车、电动汽车的出现无疑给整个行业注入了一股新鲜而且充满挑战性的血液。
凭借可以减少很多废弃物、有害气体的排放,对整个社会的生活环境都有很大的改善效果,得到社会及国家的高度的重视,具有很好的发展前景。
下面我们就来从电动车的结构引入到电动汽车传动系统,并分析它的工作原理、传动方式、优势等,并简单的列举一些成功的应用案例。
电动汽车和普通的汽车不同,它是用车载电源提供行驶的动力,用电机来驱动车轮的运动,而不是用点火装置来提供向前运动的力。
我们知道,电动汽车主要是由电力驱动及控制系统、驱动力传动系统、工作装置等各个部分组成。
它的工作原理是蓄电池中提供恒定的电流输出,这些恒定的电路通过电力调节器进行一次转换成可以驱动电动机的合适的电流和电压,从而可以驱动整个动力传动系统的正常运行,经过他们之间相互的作用最终给汽车提供可以运行的动力汽车可以正常的行驶。
由此可见,电动汽车传动系统的有效性和安全性直接影响着整个系统的运行。
电动汽车传动系统原理是直接将电动机的驱动转矩传给汽车的驱动轴。
汽车传动轴在采用电动轮驱动时,由于它是靠车载电源提供动力源驱动电动机因而可以实现带负载启动,无需离合器;也正是因为是车载电源可以提供恒定的电流,中间会有电路控制的环境来实现驱动电机的方向和转速的控制,所以不需要倒档和差速器。
若采用无级调速,就可以实现自动控制,无需变速器。
电动汽车传动系统的传动方式主要有三种:(1)电机+传动轴+后桥(2)电机+变速箱+后桥(3)电机+磁力变矩器+后桥以目前的变速箱技术成熟度而言,除了传统车的变速箱外还没有一款真正成熟的适用于电动汽车的产品,最可靠和适用的传动方式还是电机+传动轴+后桥的直驱方案。
当然在具体的设计时,我们需要更具实际情况来设计,包括电机的位置、电源的位置、驱动负载的能力、行驶速度要求、稳定性等这些都需要综合的来考虑。
论述纯电动汽车的动力传递路线1.引言1.1 概述纯电动汽车的动力传递路线是指将电能从电池传递到车轮以产生动力的过程。
与传统燃油车辆使用发动机和传动系统的复杂机械传动不同,纯电动汽车利用电动机直接驱动车轮,消除了传统动力传递链路中的机械能转化和损耗过程,使动力传递更加高效和简化。
这种简洁的动力传递路线是纯电动汽车的核心特点之一。
传统燃油车辆的动力传递路线通常是由发动机产生动力,然后通过传动系统将动力传递到车轮。
而纯电动汽车的动力传递路线则是由电池作为能源提供电能,电能经过控制系统输入到电动机中,电动机通过转动将动力传递给车轮。
简而言之,纯电动汽车的动力传递路线就是电池-电动机-车轮这样一条直接、高效的传递链路。
相比于传统燃油车辆的动力传递路线,纯电动汽车的动力传递路线具有以下优势。
首先,纯电动汽车的动力传递路线省略了传统传动系统中的传动装置,减少了传动效率和能量损耗,提高了动力传递的效率。
其次,纯电动汽车的动力传递路线简化了车辆的结构,减少了部件数量和重量,提高了整车的性能和操控性。
此外,纯电动汽车的动力传递路线还能降低噪音和振动,提升驾乘舒适度。
纯电动汽车的动力传递路线对纯电动汽车的发展具有重要影响。
一方面,优化动力传递路线的设计可以进一步提高纯电动汽车的能效和续航里程,加速电动汽车的推广和普及。
另一方面,动力传递路线的不断创新也为电动汽车的技术升级和性能提升提供了更多的可能性。
展望未来,纯电动汽车的动力传递路线将继续朝着更加高效、简化和智能化的方向发展。
随着电池技术的进一步突破和智能控制系统的不断优化,电动汽车的动力传递效率将进一步提高,续航里程将获得更大的提升。
此外,动力传递路线的创新也将为电动汽车的性能、安全性和可靠性提供更多的突破口。
因此,纯电动汽车的动力传递路线的持续研究和发展将成为推动电动汽车产业发展的重要方向。
1.2文章结构文章结构如下:1. 引言- 1.1 概述- 1.2 文章结构- 1.3 目的2. 正文- 2.1 纯电动汽车的动力传递路线概述- 2.2 动力传递路线的第一个要点- 2.3 动力传递路线的第二个要点- 2.4 动力传递路线的第三个要点3. 结论- 3.1 总结动力传递路线的优势- 3.2 对纯电动汽车发展的影响- 3.3 展望未来的发展方向文章结构部分的内容即为对整篇文章的结构进行简要介绍和概述。
电动汽车动力性能分析与计算电动汽车机械传动装置是指与电动机输出轴有运动学联系的减速齿轮传动箱或变速器、传动轴及主减速器等机械装置。
机械传动链中的功率缺失包括:齿轮啮合点处的摩擦缺失、轴承中的摩擦缺失、旋转零件与密封装置之间的摩擦缺失以及搅动润滑油的缺失等。
1.2 电动汽车行驶方程式与功率平稳电动汽车在上坡加速行驶时,作用于电动汽车的阻力与驱动力始终保持平稳,建立如下的汽车行驶方程式:以电动汽车行驶速度va乘以(2)式两端,考虑机械缺失,再通过单位换算之后可得:或由〔4〕、〔5〕两式能够看出,电动汽车在行驶时,电动机传递到驱动轮的输出功率与表达在驱动轮上的阻力功率始终保持平稳。
将(4)变换可得:式中PM为电动机的输出功率。
用曲线图表示上述功率关系,将电动机的输出功率、汽车经常遇到的阻力功率与对应车速的关系归置在x-y坐标图上得到电动汽车功率平稳图如图1所示。
利用功率平稳可定性分析电动汽车设计中的有关动力性问题,另外,依照功率平稳能看出电动汽车行驶时电动机的输出功率,因此经济性分析中也常用到它。
1.3 电动汽车动力性能运算与内燃机汽车相似,电动汽车的动力性指标有三种,即最高车速、最大加速能力和最大爬坡度。
汽车的最高车速是指汽车在无风的条件下,在水平良好硬路面上所能到达的最高速度。
电动汽车的最高车速运算:满足(7)式的最大值即为反映车辆动力性的指标Vamax。
汽车的加速能力用汽车原地起步的加速能力和超车加速能力表示,通常采纳汽车加速过程中所通过的加速时刻和加速距离作为评判汽车加速性的指标。
电动汽车的加速时刻运算为:汽车的爬坡能力是指汽车在良好道路上以最低行驶车速上坡行驶的最大坡度。
电动汽车爬坡度的运算:2、电动汽车主电路的负载电流分析电动汽车在行驶过程中,所需的阻力功率随时都在变化,电动机的输出功率也将随阻力功率的变化而变化。
电动汽车主电路中传递的电功率也是在不断变化,但与所需的阻力功率始终保持平稳。
电动汽车传动公式
电动汽车与传统内燃机汽车之间的主要差别是采用了不同的动力源,它由蓄电池提供电能,经过驱动系统和电动机,驱动电动汽车行驶。
电动汽车的能量供给和消耗,与蓄电池的性能密切相关,直接影响电动汽车的动力性和续驶里程,同时影响电动汽车行驶的成本效益。
电动汽车在行驶中,由蓄电池输出电能给电动机,用于克服电动汽车本身的机械装置的内阻力,以及由行驶条件决定的外阻力。
电动汽车在运行过程中,行驶阻力不断变化,其主电路中传递的功率也在不断变化。
对电动汽车行驶时的受力状况以及主电路中电流的变化进行分析,是研究电动汽车行驶性能和经济性能的基础。
1 电动汽车的动力性分析
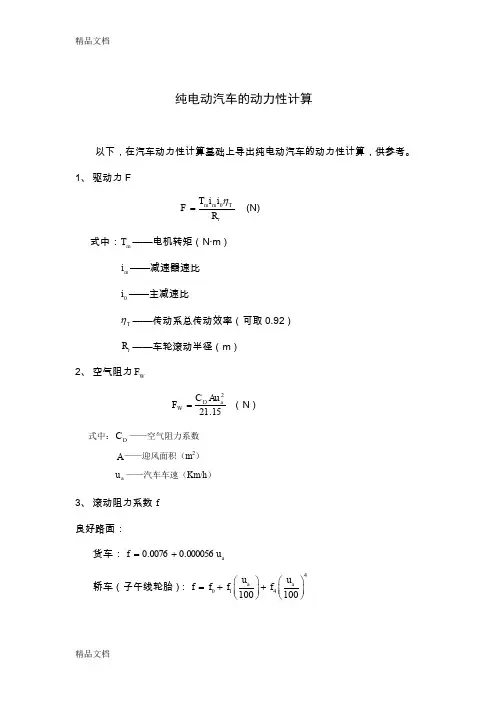
1.1 电动汽车的驱动力
电动汽车的电动机输出轴输出转矩M,经过减速齿轮传动,传到驱动轴上的转矩Mt,使驱动轮与地面之间产生相互作用,车轮与地面作用一圆周力F0,同时,地面对驱动轮产生反作用力Ft.Ft与F0大小相等方向相反,Ft方向与驱动轮前进方向一致,是推动汽车前进的外力,将其定义为电动汽车的驱动力。
有:
电动汽车机械传动装置是指与电动机输出轴有运动学联系的减速齿轮传动箱或变速器、传动轴及主减速器等机械装置。
机械传动链中的功率损失包括:齿轮啮合点处的摩擦损失、轴承中的摩擦损失、旋转零件与密封装置之间的摩擦损失以及搅动润滑油的损失等。
1.2 电动汽车行驶方程式与功率平衡
电动汽车在上坡加速行驶时,作用于电动汽车的阻力与驱动力始终保持平衡,建立如下
的汽车行驶方程式:
以电动汽车行驶速度va乘以(2)式两端,考虑机械损失,再经过单位换算之后可得:
或
由(4)、(5)两式可以看出,电动汽车在行驶时,电动机传递到驱动轮的输出功率与体
现在驱动轮上的阻力功率始终保持平衡。
将(4)变换可得:
式中PM为电动机的输出功率。
用曲线图表示上述功率关系,将电动机的输出功率、汽车经常遇到的阻力功率
与对应车速的关系归置在x-y坐标图上得到电动汽车功率平衡图如图1所示。
利用功率平衡可定性分析电动汽车设计中的有关动力性问题,另外,根据功率平衡能看出电动汽车行驶时电动机的输出功率,所以经济性分析中也常用到它。
1.3 电动汽车动力性能计算
与内燃机汽车相似,电动汽车的动力性指标有三种,即最高车速、最大加速能力和最大爬坡度。
汽车的最高车速是指汽车在无风的条件下,在水平良好硬路面上所能到达的最高速度。
电动汽车的最高车速计算:
满足(7)式的最大值即为反映车辆动力性的指标V amax。
汽车的加速能力用汽车原地起步的加速能力和超车加速能力表示,通常采用汽车加速过程中所经过的加速时间和加速距离作为评价汽车加速性的指标。
电动汽车的加速时间计算
为:
汽车的爬坡能力是指汽车在良好道路上以最低行驶车速上坡行驶的最大坡度。
电动汽车
爬坡度的计算:
2 电动汽车主电路的负载电流分析
电动汽车在行驶过程中,所需的阻力功率随时都在变化,电动机的输出功率也将随阻力功率的变化而变化。
电动汽车主电路中传递的电功率也是在不断变化,但与所需的阻力功率始终保持平衡。
通常,电动汽车在运行过程中,主电路中的电流变化较大,主电路电流的大小不仅影响系统的散热与正常工作,而且直接影响蓄电池的放电性能与使用寿命,同时影响一次充电后的续驶里程。
当采用交流感应电动机时,电动汽车的主电路是指给电动汽车行驶提供所需能量的电路,即动力蓄电池组到控制器和逆变器之间的直流电路,以及逆变器与交流感应电动机之间
的交流电路,如图2所示。
为了简化起见,我们在分析主电路的负载电流时总是假定蓄电池的端电压以及逆变器的输出电压保持不变。
电动汽车在平路上等速行驶时所需的功率换算至电机输出轴为:
假定电动汽车主电路的电压保持不变,根据图2即可计算电动汽车等速行驶工况的主电路负载电流。
电动汽车主电路中的直流电路的负载电流为(假设逆变器的效率为ηMI,电动机
的效率为ηM):
电动汽车主电路中交流电路的负载电流为:
同样,可以计算电动汽车在加速行驶时的主电路的负载电流或在坡道上等速爬坡时主电路的负载电流。
3 结论
通过以上分析可以看出,电动汽车的动力性与其行驶过程中的能量消耗密切相关,因此,应当通过提高动力蓄电池的性能、降低滚动阻力和空气阻力的能耗等措施来提高电动汽车的动力性能。
另外,由于行驶时电动汽车主电路电流的大小直接影响蓄电池的放电性能与使用寿命,同时影响一次充电后的续驶里程,因此在设计电动汽车时,应综合考虑电池的质量、驱动电
动机的电压和额定电流、加速性能、续驶里程及安全性能等因素,通过系统优化来改进电动汽车的性能和降低成本。