第章船舶甲板机械电力拖动及其电气控制
- 格式:pptx
- 大小:5.44 MB
- 文档页数:72

第一章船舶常用电器第二章船舶电力拖动基本控制第三章船舶重要辅机的自动控制第四章甲板机械的电力拖动及自动控制第五章船舶舵机的电力拖动及自动控制第六章船舶电力系统第七章船舶同步发电机参数调节及运行控制第八章船舶电站自动化第九章船舶照明与通讯第十章机舱集中监视与报警系统第十一章船舶安全用电和安全管理第十二章船舶电气管理职责第一章船舶常用电器§1-1 电器基本知识现代商船大多采用内燃机作为主推进动力装置,所配备的绝大多数机械都采用电力拖动方式进行工作。
其电能供给由独立的船舶电力系统予以实现。
为了满足船舶正常运营的需要,该系统必须具备供电、配电、控制与保护等功能。
因此,船舶电力系统是一个电气线路十分复杂的系统。
任何复杂的电气线路都是由一些基本的单元电路组合而成,而基本单元电路又均为若干功能不同的电器元件的组合。
所以,了解各类电器元件的结构、功能及工作原理,是掌握一个控制线路乃至一个系统工作原理的必然要求。
所谓电器,即是根据外界的电信号或非电信号自动或手动地实现电路的接通、断开、控制、保护与调节的电路元件。
简言之,电器就是电的控制元件。
电力系统中所使用的电器,种类、数目非常之多,下面就扼要介绍一下它们的分类方法及相应类型。
1.按工作电压分类1)高压电器交流大于1200V,直流大于1500V的电器。
2)低压电器交流小于1200V,直流小于1500V的电器。
船舶电力系统中常用电器均为低压电器。
2.按用途分类1)控制电器用于各种电气传动系统中,对电路及系统进行控制的电器。
如接触器,各种控制继电器等。
2)保护电器用于电力系统中,对发电机电网与用电设备进行保护的电器。
如:熔断器、热继电器等。
3)主令电器在电器控制系统中,发出指令,改变系统工作状态的电器。
如:按钮、主令控制器等。
4)执行电器接受电信号以实现某种功能或完成某种动作的电器。
如:电磁铁、制动器等。
3.按动作方式分类1)手动控制电器依靠人工操作进行动作而执行指令的电器。
第十一章 船舶甲板机械电力拖动控制甲板机械主要指起货机、锚机、绞缆机、舱盖开关机、旋梯起落机和吊舱机等。
从拖动的方向式来看,在现代的船舶上,主要采用电力传统和电动液压传动系统。
本章主要讨论起货机和锚机的控制系统。
第一节 锚机的电力拖动与控制锚机是船舶所必须的重要设备,用于船舶安全停泊在水面或系泊在码头上。
—、锚机运行工作特点当船舶抛锚时,如水深不大,则可松开锚机的制动器,依靠锚及锚链的自重进行重力抛锚,此时可由手动带式制动器来控制和调节抛锚速度,为避免过大的抛锚速度需要采用机械抛锚,这时电动机工作在再生制动状态,以获得稳定的抛锚速度。
起锚时,锚机必须有足够的力矩克服风、水流及锚链的阻力,收进锚链。
锚机在运行中有正常起锚和应急起锚两种工作情况。
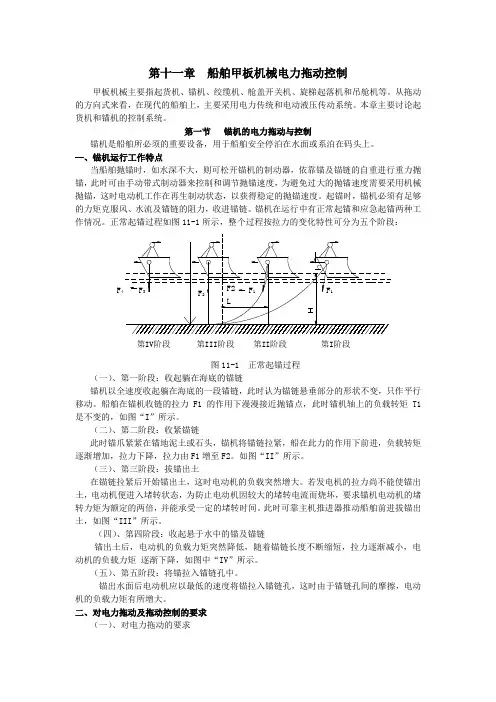
正常起锚过程如图11-1所示,整个过程按拉力的变化特性可分为五个阶段:F第IV阶段第II阶段第III阶段第I阶段图8-1 起锚过程示意图及作用力分析图11-1 正常起锚过程 (一)、第一阶段:收起躺在海底的锚链锚机以全速度收起躺在海底的一段锚链,此时认为锚链悬垂部分的形状不变,只作平行移动。
船舶在锚机收链的拉力F1的作用下漫漫接近抛锚点,此时锚机轴上的负载转矩T1是不变的,如图“I ”所示。
(二)、第二阶段:收紧锚链此时锚爪紧紧在锚地泥土或石头,锚机将锚链拉紧,船在此力的作用下前进,负载转矩逐渐增加,拉力下降,拉力由F1增至F2。
如图“II ”所示。
(三)、第三阶段:拔锚出土在锚链拉紧后开始锚出土,这时电动机的负载突然增大。
若发电机的拉力尚不能使锚出土,电动机便进入堵转状态,为防止电动机因较大的堵转电流而烧坏,要求锚机电动机的堵转力矩为额定的两倍,并能承受一定的堵转时间。
此时可靠主机推进器推动船舶前进拔锚出土,如图“III ”所示。
(四)、第四阶段:收起悬于水中的锚及锚链锚出土后,电动机的负载力矩突然降低,随着锚链长度不断缩短,拉力逐渐减小,电动机的负载力矩 逐渐下降,如图中“IV ”所示。