重庆大学机械原理章节习题库 第一章思考题及复习题(含答案)
- 格式:doc
- 大小:206.50 KB
- 文档页数:7
第一章平面机构的结构分析
基本概念题与答案
1.什么是平面机构?
答:组成机构的所有构件都在同一平面或相互平行的平面上运动。
2.什么是运动副?平面运动副分几类,各类都有哪些运动副?其约束等于几个?
答:运动副:两个构件直接接触而又能产生一定相对运动的联接叫运动副。
平面运动副分两类:
(1)平面低副(面接触)包括:转动副、移动副,其约束为 2。
(2)平面高副(点、线接触)包括:滚子、凸轮、齿轮副等,约束为 1。
3.什么是运动链,分几种?
答:若干个构件用运动副联接组成的系统。
分开式链和闭式链。
4.什么是机架、原动件和从动件?
答:机架:支承活动构件运动的固定构件。
原动件:运动规律给定的构件。
从动件:随原动件运动,并且具有确定运动的构件。
5.机构确定运动的条件是什么?什么是机构自由度?
答:条件:原动件的数目等于机构的自由度数。
机构自由度:机构具有确定运动所需要的独立运动参数。
6 .平面机构自由度的计算式是怎样表达的?其中符号代表什么?
答:F =3n- 2P L-P H其中:
n----活动构件的数目,P L----低副的数目,p H----高副的数目。
7.在应用平面机构自由度计算公式时应注意些什么?
答:应注意复合铰链、局部自由度、虚约束。
8.什么是复合铰链、局部自由度和虚约束,在计算机构自由度时应如何处理?
答:复合铰链:多个构件在同一轴线上组成转动副,计算时,转动副数目为m-1个
局部自由度:与整个机构运动无关的自由度,计算时将滚子与其组成转动副的构件假想的焊在一起,预先排除局都自由度。
虚约束:不起独立限制作用的约束,计算时除去不计。
9.什么是机构运动简图,有什么用途?
答:抛开构件的几何形状,用简单的线条和运动副的符号,按比例尺画出构件的运动学尺寸,用来表达机构运动情况的图形。
用途:对机构进行结构分析、运动分析和力分析。
典型例题
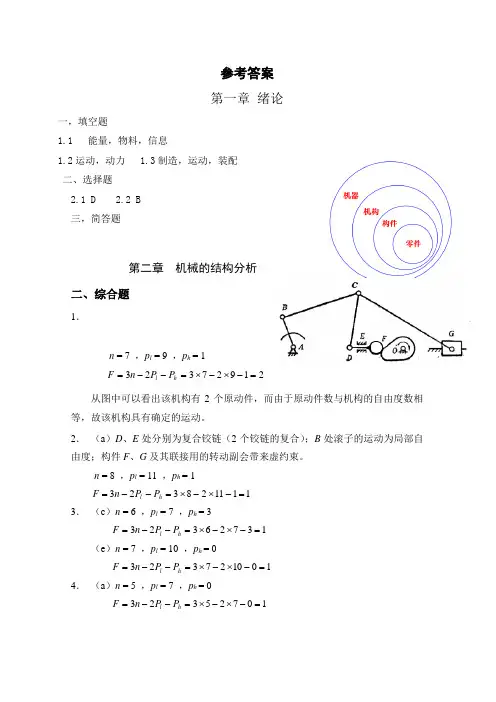
例2-1 试计算图示各运动链的自由度数,并判定他们能否成为机构(标有箭头的构件为原动件)。
(a)(b)
(c)(d)
解(a)A处为复合铰链(注意小齿轮与机架构成的转动副易被忽略)。
n =4,P L = 5,P H = 1
F =3n -2P L-P H = 3×4-2×5-1 =1
此运动链有一个原动件,故能成为机构。
(b)D处滚子为局部自由度;E(或F)处为虚约束;D 处有一个高副为虚约束(注意:此点易被忽略)。
n =4,P L=5,P H = 1
F =3n-2P L-P H=3×4-2×5-1=1
此运动链有一个原动件,故能成为机构。
(c)A处为复合铰链。
n =10,P L=14
F = 3n-2P L=3×l0-2×14 =2
此运动链有两个自由度,但只有一个原动件,运动链的运动不能确定,故不能成为机构。
欲使其成为机构,需再增加一个原动件(如杆AK)。
(d)此轮系有两行星轮2,其中有一个为“对传递运动不起独立作用的对称部分”,则此行星轮及与其有关的一个转动副和两个高副为虚约束。
另外,轮5(系杆H)与机架在B和C处均构成转动副,可将B 处的转动副视为虚约束;也可将C处的转动副视为虚约束,则B处为复合铰链。
n =5,P L=5,P H = 4
F =3n-2P L-p H = 3×5-2×5-4 =1
此轮系有一个原动件,故能成为机构。
第一章模拟试题
1.填空题:
(1)机构具有确定运动的条件是;根据机构的组成原理,任何机构都可看成是由和组成的。
(2)由M个构件组成的复合铰链应包括个转动副。
(3)零件是机器中的单元体;构件是机构中的单元体。
(4)构件的自由度是指;机构的自由度是指。
(5)在平面机构中若引入一个高副将引入个约束,而引入一个低副将引入个约束,构件数、约束数与机构自由度的关系是。
(6)一种相同的机构组成不同的机器。
A.可以 B.不可以
(7)Ⅲ级杆组应由组成。
A.三个构件和六个低副; B.四个构件和六个低副; C.二个构件和三个低副。
(8)内燃机中的连杆属于。
A.机器 B.机构 C.构件
(9)有两个平面机构的自由度都等于1,现用一个有两铰链的运动构件将它们串成一个平面机构,这时自由度等于。
A .0 B.1 C.2
(10)图1.10所示的四个分图中,图 C 所示构件系统是不能运动的。
3.图1.12所示为一机构的初拟设计方案。
试求:
(1) 计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。
(2) 如此初拟方案不合理,请修改并用简图表示。
4.计算图1.13所示机构的自由度,判断是否有确定运动;若不能,试绘出改进后的机构简图。
修改的原动件仍为AC 杆(图中有箭头的构件)。
5.计算图1.14所示机构的自由度。
6.计算图1.15所示机构的自由度。
E
有局部自由度 n =4,p L =5,p H =1
有虚约束
若n =7,则p L =9,p H =1 若n =6,则p L =8,p H =1 此题图有问题 有复合铰链
n =7,p L =10,p H =0
n =5, p L =7,p H =0
8.判断图1.17所示各图是否为机构。
9.计算图1.18所示机构的自由度。
10.计算图1.19所示机构的自由度。
11.计算图1.20所示机构的自由度。
已知CD=CE=FE=FD ,且导路H,J 共线,L 和G 共线,H ,J 的方向和L ,G 的方向垂直。
机构中若有局部自由度,虚约束或复合铰链,应指出。
有虚约束,复合铰链 n =7,p L =10,p H =0
有复合铰链
n =9,p L =13,p H =0,原动件数为1,成为机构
有复合铰链
n =6,p L =8,p H =0,原动件数为2,成为机构
有复合铰链
n =6,p L =8,p H =1
有复合铰链
n =5,p L =7,p H =0
n =4,p L =5,p H =0
有复合铰链,虚约束 n =9,p L =13,p H =0
有局部自由度,复合铰链,虚约束 n =8,p L =11,p H =1
有复合铰链
n=9,p L=13
或p L=12,p H=2
公共约束数4
n=3,p L=5
F=2⨯3-1⨯5=1 13.计算下图所示平面机构的自由度(若存在复合铰链、局部自由度及虚约束请指明),并判断该
机构的运动是否确定。
若运动是确定的,进行杆组分析,并画图表示拆杆组过程,指出各级杆组的级别
及机构的级别。
有复合铰链
n=9,p L=13,F=1,
运动确定,II级机构
n=7,p L=10,F=1,
运动确定,III级机构
13题图14题图
14.计算图示平面机构的自由度(若存在复合铰链、局部自由度及虚约束请指明),并
判断该机构的运动是否确定。
若运动是确定的,进行杆组分析,并画图表示出拆杆组过程,
指出各级杆组的级别及机构的级别。
15.计算下图所示平面机构的自由度(若存在复合铰链、局部自由度及虚约束请指明),并判断该
机构的运动是否确定。
?
有复合铰链,局部自由度,
虚约束
n=7,p L=9,p H=1
无确定运动
n=4,p L=6,p H=0
不能运动
15题图16题图
16.图示为一机构的初拟设计方案。
试:计算其自由度,分析其设计是否合理?
如果此初拟方案不合理,请修改并用简图表示。
(修改时应保持原设计意图,即原动件与输出构件运动形式和相对位置不变)
17. 计算图示机构的自由度;当构件1和构件5分别作为原动件时,分析组成机构的基本杆组数目及级别,并判定机构的级别;
17题图
18题图
18.如图所示为牛头刨床的一个机构设计方案简图。
设计者的意图是动力由曲柄1输入,通过滑块2使摆动导杆3作往复摆动,并带动滑枕4往复移动以达到刨削的目的。
试分析该方案能否实现设计意图?若不能实现,应如何修改?
4 3 2
1
5 6 n =5,p L =7,p H =0 1为原动件,II 级机构 5为原动件,III 级机构。