分别加减一个纠偏控制量 U / 2 ,
EdM D EdO
•
EdO (vl vr ) U / 2,Ur Uc U / 2 相应的电机
输出速度为:
V (s) /U (s) k /( ms 1)
vl vc v / 2, vr vc v / 2, vr vl v, vr vl 2vc
由于 很小,则 sin
于是最终运动学模型如下:
EdM D EdO
•
EdO (vl vr ) / 2
•
v / L
精选课件
11
4 如何建立电机驱动模型?
目标:寻找输入电压与车轮速度(vlv
直流电机动态过程的微分方程如下:
r)之间的关系。
••
•
m e n m n n Kc U a K f Tc
1
AGV智能小车简 述
精选课件
1
目录
1
简述
2
数学建模
3
Simulink建模与仿真
4
控制系统设计
精选课件
2
AGV智能小车简述
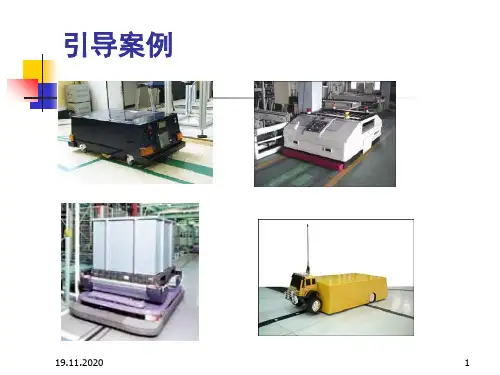
AGV(Automatic Guided Vehicle)智能小车又称自动导引车,是一种 在计算机监控下,根据具体规划和作业要求完成取货、送货、充电等任务 的无人驾驶自动化车辆。
设计状态反馈阵时,要使系 精选课件
19
3.状态反馈控制器设计
在MATLAB的控制系统工具箱 中提供了单变量系统极点配置
acker(),其格式为
K=acker(A,B,p)
程序如下:
A0;=];[-0.1 0 0;10/3 0 0;5/3 -3/4
B=[7:0:0];
C=[0:0:1];
D=0;
Rc=rank(ctrb(A,B));