D安装设置步骤和方法
- 格式:docx
- 大小:118.06 KB
- 文档页数:14

840D安装、设置步骤和方法1. 要求通道1直线轴: X、Y、Z, 工作台: B, 摆头: A, 五轴联动, 主轴: CX1通道2刀库轴: MX1测量系统:X、Y、Z、CX1、MX1用2048线的电机编码器, B A用ROD280 18000线圆编码器611D伺服驱动器:电源模块: 6SN1145-1BA02-0CA1主轴驱动器: 6SN1123-1AA00-0LA1 6SN1118-0DG23-0AA1X、Y、Z、刀库轴驱动器: 6SN1123-1AB00-0BA1 6SN1118-0DM21-0AA0A、B轴驱动器: 6SN1123-1AB00-0CA1 6SN1118-0DM23-0AA0伺服电机:主轴电机: 1PH7137-2ND00-0CA0X、Y、Z 轴伺服电机: 1FT6102-1AC71-4AG1B、A 轴伺服电机: 1FT6084-8AC71-4AA0刀库轴伺服电机: 1FK6063-6AF71-1AA0ND行程:X=0-1220mm, Y=0-915mm, Z=0-915mm,B=0-359.999deg, A=0-105deg, 刀库轴=0-359.999deg最大速度:X=1200mm/min, Y=1200mm/min, Z=1200mm/min, B=4rpm(1440deg/min),A=2rpm(720deg/min), MX1=1rpm(360deg/min), S=1000rpm2. 基本设置2.1 准备硬件接线PLC总清NCU S3拨到1, 按Reset按钮, 完成后将NCU S3拨回0NCK总清NCU S4拨到3, 等PS灯亮后将S4拨到2, 立即再拨到3, 等PS灯闪后将S4拨到0 标志: NCU的NC状态指示灯+5V和PLC状态指示灯PR亮(绿色)报警2001 PLC has not started up 和120202、4060显示器显示X1 Y1 Z1 A1四个轴数据机床操作面板MCP和手持单元HHU所有的灯闪亮。

台金伺服驱动器tk-d系列说明书摘要:一、台金伺服驱动器tk-d系列简介1.产品背景2.产品型号及规格3.产品应用领域二、tk-d系列伺服驱动器的性能特点1.强大的驱动能力2.稳定的控制性能3.智能化的操作功能4.高效节能的设计三、tk-d系列伺服驱动器的安装与调试1.安装环境及注意事项2.安装步骤与方法3.调试流程与操作四、tk-d系列伺服驱动器的维护与保养1.日常维护2.定期检查3.故障排除与处理五、tk-d系列伺服驱动器的应用案例1.应用领域及范围2.成功案例介绍正文:台金伺服驱动器tk-d系列说明书一、台金伺服驱动器tk-d系列简介台金伺服驱动器tk-d系列是一款高性能、智能化的驱动设备,主要用于控制机械设备的运动和位置。
该系列产品凭借出色的驱动能力、稳定的控制性能、智能化的操作功能以及高效节能的设计,赢得了广大用户的认可和好评。
1.产品背景随着科技的不断发展,伺服驱动器在工业生产中的地位越来越重要。
台金公司作为国内知名的驱动设备制造商,凭借多年的技术积累和市场经验,推出了tk-d系列伺服驱动器,以满足不同行业和领域的需求。
2.产品型号及规格tk-d系列伺服驱动器包括多种型号,用户可以根据自己的需求选择合适的规格。
产品规格包括功率、转矩、速度等参数,用户可以根据设备的要求进行选择。
3.产品应用领域tk-d系列伺服驱动器广泛应用于各种工业生产领域,如机床、自动化生产线、物流设备等。
凭借出色的性能,该系列产品已成为众多行业和企业的首选。
二、tk-d系列伺服驱动器的性能特点tk-d系列伺服驱动器具有强大的驱动能力、稳定的控制性能、智能化的操作功能以及高效节能的设计。
1.强大的驱动能力tk-d系列伺服驱动器具有高功率密度,可以驱动各种类型的机械设备。
在高速运行时,依然能够保证出色的驱动力矩,满足设备对速度和精度的要求。
2.稳定的控制性能tk-d系列伺服驱动器采用高性能的硬件和软件设计,具有稳定的控制性能。

linux dconf-editor用法概述说明1. 引言1.1 概述在Linux系统中,dconf-editor是一个强大的配置编辑器,它允许用户修改系统的各种设置和行为。
通过这个工具,用户可以轻松地定制桌面外观、调整应用程序的行为,并进行系统设置的自定义。
1.2 文章结构本文将对Linux dconf-editor的使用方法进行详细说明和介绍。
首先会介绍什么是dconf-editor以及如何安装它,然后会详细解释其基本界面。
接下来,我们将讨论一些常用的功能,包括修改桌面外观设置、配置应用程序行为以及自定义系统设置。
在文章末尾,我们还将提供一些注意事项和技巧,例如避免修改未知参数、导入和导出配置文件以及恢复默认设置。
最后,文章将给出总结主要要点,并展望未来关于dconf-editor的发展前景。
1.3 目的本文旨在帮助读者深入了解Linux dconf-editor的使用方法,并能够灵活地利用该工具来定制自己的Linux环境。
通过学习本文所介绍的内容,读者将能掌握dconf-editor的基本操作和常见功能,并能够根据个人需求进行系统设置和调整。
以上是“1. 引言”部分的详细内容。
希望对你撰写长文有所帮助。
2. Linux dconf-editor用法2.1 什么是dconf-editordconf-editor是Linux操作系统上的一个图形化工具,它被用来管理和编辑dconf数据库中的配置项。
在Linux中,dconf是一个轻量级的配置系统,负责存储用户和应用程序的设置选项。
2.2 安装dconf-editor要安装dconf-editor,可以使用如下命令:```sudo apt-get install dconf-editor```这个命令会从软件源中下载并安装dconf-editor。
2.3 基本界面介绍打开dconf-editor后,你将看到一个由树形结构组成的界面。
左侧是配置项的层次结构,右侧则显示了所选配置项的详细信息。
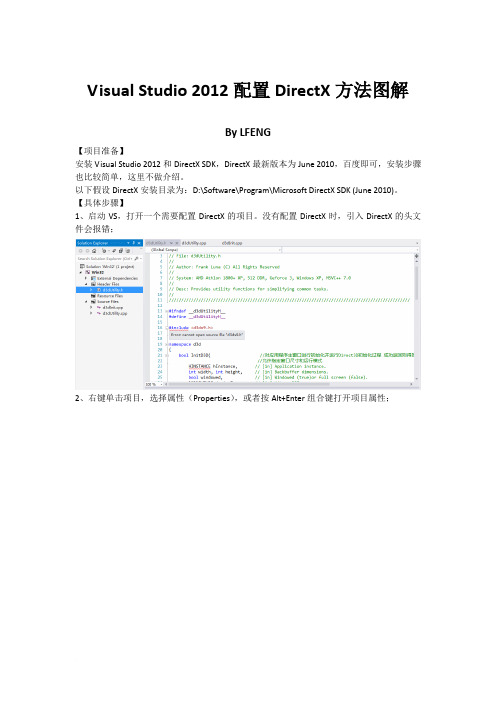
Visual Studio 2012配置DirectX方法图解By LFENG【项目准备】安装Visual Studio 2012和DirectX SDK,DirectX最新版本为June 2010,百度即可,安装步骤也比较简单,这里不做介绍。
以下假设DirectX安装目录为:D:\Software\Program\Microsoft DirectX SDK (June 2010)。
【具体步骤】1、启动VS,打开一个需要配置DirectX的项目。
没有配置DirectX时,引入DirectX的头文件会报错;2、右键单击项目,选择属性(Properties),或者按Alt+Enter组合键打开项目属性;3、由于VS2012默认项目字符集为UNICODE,但是以前的项目可能不是采用UNICODE字符集,所以要注意Character Set设置是否与当前项目匹配。
这里演示的项目不是采用UNICODE字符集的,所以需要改成多字符集(Multi-Byte Character Set)。
4、点击导航栏中的VC++ Directories,在Include Directories项中添加DirectX安装目录下的Include目录(D:\Software\Program\Microsoft DirectX SDK (June 2010)\Include),Library Directories项中添加DirectX安装目录下Lib目录中的x86目录(D:\Software\Program\Microsoft DirectX SDK (June 2010)\Lib\x86);5、添加目录完毕后,展开导航栏中的Linker,点击Input,在Additional Dependencies中添加以下三个lib文件:d3d9.lib d3dx9.lib Winmm.lib添加时注意在lib之间添加分号,如下:d3d9.lib;d3dx9.lib;Winmm.lib;6、由于d3d9.lib和d3dx9.lib在DirectX安装目录下的Lib\x86目录中,因此,还需添加对应的lib目录。

Winnfsd使用方法1. 简介Winnfsd是一个用于在Windows操作系统上搭建NFS(Network File System)服务器的工具。
NFS是一种可以在不同的操作系统之间共享文件的协议,通过使用NFS,可以实现在Windows操作系统上与其他操作系统之间进行文件共享的功能。
Winnfsd是一个开源工具,它提供了一个轻量级的NFS服务器,可以在Windows上运行。
使用Winnfsd,您可以将Windows文件系统共享给其他操作系统,如Linux、Unix等。
本文将介绍如何安装、配置和使用Winnfsd。
2. 安装Winnfsd在开始使用Winnfsd之前,您需要先下载并安装Winnfsd。
1.打开Winnfsd的官方网站([)。
2.在页面上找到并点击”Releases”选项卡。
3.下载最新的可执行文件(.exe)。
4.运行下载的可执行文件,并按照安装向导的指示完成安装。
3. 配置Winnfsd安装完成后,您需要配置Winnfsd以设置共享文件夹和访问权限。
1.打开命令提示符(CMD)。
2.运行以下命令以创建一个配置文件:winnfsd.exe config -c此命令将在当前目录下创建一个名为”winnfsd.conf”的配置文件。
3.使用文本编辑器(如Notepad++)打开”winnfsd.conf”文件。
4.在文件中定义共享文件夹和访问权限。
以下是一个示例配置文件的内容:[exports]C:\SharedFolder -ro -network 192.168.0.0 -mask 255.255.255.0在上述示例中,我们将”C:“共享给192.168.0.0/24网络,并设置为只读权限。
–-ro:只读权限。
–-network:指定允许访问的网络。
–-mask:指定网络掩码。
5.保存并关闭配置文件。
4. 启动Winnfsd配置完成后,您可以启动Winnfsd并开始共享文件夹。

discuz使用手册一、简介Discuz是一款开源的论坛软件,拥有强大的功能和易于使用的界面。
本使用手册将详细介绍Discuz的各项功能和操作方法,帮助用户快速上手并充分发挥其优势。
二、安装与设置1. 安装步骤a. 下载Discuz安装包并解压;b. 创建数据库,并将Discuz安装包中的文件上传至服务器;c. 运行安装向导,填写数据库信息和管理员设置;d. 完成安装并进行相关配置。
2. 基本设置a. 登录后台管理中心;b. 配置站点名称、URL、时区等基本信息;c. 设定用户注册和登录方式;d. 设置论坛的版块和权限。
三、论坛管理1. 用户管理a. 注册与审核:设定用户注册流程及审核方式;b. 用户组管理:创建不同的用户组以区分权限和管理;c. 用户权限设置:设定不同用户组的权限。
2. 板块管理a. 创建板块:设置论坛的版块及其属性;b. 板块权限:为不同用户组设定各自的板块权限;c. 主题分类:创建主题分类以便用户更好地进行讨论。
四、主题与回复1. 发表主题a. 在指定板块中点击发布新主题;b. 编写主题标题和内容;c. 标记关键字和添加附件(如果需要);d. 发布主题并等待其他用户回复。
2. 回复主题a. 在主题页面中点击回复按钮;b. 编写回复内容;c. 可选的附带图片、链接等;d. 提交回复并等待其他用户互动。
五、权限管理1. 用户权限a. 默认用户组权限:管理新注册用户的权限;b. 特殊用户组权限:特定用户组的特殊权限设置;c. 用户自定义权限:用户能够自行设置的权限。
2. 板块权限a. 读权限:设置用户可以阅读哪些板块;b. 发帖权限:设定用户是否能够在特定板块发布主题;c. 回帖权限:控制用户是否可以回复特定板块的主题。
六、其他功能1. 积分和勋章:设定用户获得积分和勋章的规则;2. 用户签名:设置用户在论坛中的个性签名;3. 搜索功能:快速搜索论坛中的主题和回复;4. 草稿箱:自动保存用户未发布的内容;5. 私信和@功能:用户之间的私密交流;6. 管理员工具:包括数据备份、论坛开关等。
DBEaver用法介绍DBEaver是一个免费的、开源的数据库管理工具,支持多种数据库,包括MySQL、Oracle、PostgreSQL等。
它提供了一套直观、易用的图形界面,可用于连接、查询和管理数据库。
本文将介绍DBEaver的用法,包括安装、连接数据库、查询数据、管理表和导入导出数据等操作。
安装DBEaver在使用DBEaver之前,首先需要将其安装到您的计算机上。
以下是安装步骤:1.打开DBEaver官方网站()。
2.在网站上选择适用于您操作系统的版本,例如Windows、macOS或Linux。
3.点击下载按钮,下载安装程序。
4.双击安装程序,按照提示完成安装。
连接数据库安装完DBEaver后,您可以使用以下步骤连接您的数据库:1.打开DBEaver应用程序。
2.在主界面的左上角,点击“新连接”按钮。
3.在弹出的对话框中,选择您要连接的数据库类型,例如MySQL。
4.输入数据库连接信息,包括主机名、端口号、用户名和密码等。
根据您的数据库配置填写相应的信息。
5.点击“测试连接”按钮,确保连接信息正确并成功连接到数据库。
6.点击“保存并连接”按钮,保存连接信息并连接到数据库。
查询数据连接到数据库后,您可以使用DBEaver执行SQL查询操作。
以下是查询数据的步骤:1.在左侧的导航栏中,展开数据库连接,找到要查询的数据库和表。
2.右键点击表名,选择“查询数据”选项。
3.在查询编辑器中,输入SQL查询语句,例如SELECT * FROM table_name。
4.点击“执行”按钮执行查询。
5.查询结果将在下方的结果窗口中显示。
您可以通过点击表头对结果进行排序,或者使用过滤器筛选数据。
管理表除了查询数据,DBEaver还提供了一些管理表的功能,包括创建表、更改表结构和删除表等。
以下是管理表的操作:创建表要创建一个新表格,请按照以下步骤进行操作:1.在左侧的导航栏中,展开数据库连接,找到要操作的数据库。
通力门机板d10插件说明一、插件概述通力门机板d10插件是一款用于通力门机板d10的附加模块,用于扩展和增强门机板的功能。
本文将详细介绍通力门机板d10插件的特点、安装方法以及使用说明。
二、特点通力门机板d10插件具有以下特点: 1. 兼容性强:通力门机板d10插件可以与通力门机板d10完美配合使用,无需额外的配置和调整。
2. 功能丰富:通力门机板d10插件提供了多种实用的功能,如远程控制、报警系统等。
3. 稳定可靠:通力门机板d10插件经过严格的测试和验证,确保其稳定性和可靠性。
三、安装方法安装通力门机板d10插件非常简单,只需按照以下步骤进行操作: 1. 下载插件:从通力官方网站或其他可靠来源下载通力门机板d10插件的安装文件。
2. 解压文件:将下载的安装文件解压到指定的目录,确保文件完整且无损坏。
3. 安装插件:运行安装文件,按照提示完成插件的安装过程。
4. 配置插件:根据实际需求,对插件进行必要的配置和设置。
四、使用说明通力门机板d10插件的使用非常简单,下面将详细介绍几个常用功能的操作步骤:1. 远程控制功能远程控制功能可以让用户通过网络远程控制门机板d10的运行状态和参数设置。
操作步骤: 1. 打开通力门机板d10插件的远程控制界面。
2. 输入门机板d10的IP地址和端口号。
3. 点击连接按钮,与门机板建立连接。
4. 在远程控制界面上,可以进行各种操作,如开关门、调整参数等。
2. 报警系统功能报警系统功能可以实时监测门机板d10的运行状态,一旦出现异常情况将立即发送报警通知。
操作步骤: 1. 打开通力门机板d10插件的报警系统界面。
2. 设置报警系统的参数,如报警方式、报警接收人等。
3. 点击启动按钮,开始监测门机板d10的运行状态。
4. 一旦出现异常情况,报警系统将自动发送报警通知。
3. 数据分析功能数据分析功能可以对门机板d10的运行数据进行统计和分析,帮助用户了解门机板的工作情况。
cass9.23D插件教程
CASS9.23D是一个用于计算机辅助结构设计的插件,可以帮助工程师进行模型建立、计算和验证。
如果你想学习如何使用CASS9.23D插件,建议你可以参考以下步骤:
1. 安装CASS9.23D插件。
首先,你需要下载并安装CASS9.23D插件。
该插件通常
可以在官网或者第三方平台上下载。
2. 在CAD软件中启用CASS9.23D插件。
然后,你需要在使用的CAD软件中启用
CASS9.23D插件。
具体方法可能会因软件而异,你可以参考软件的帮助文档。
3. 创建模型。
接下来,你需要在CAD软件中建立结构模型。
这一步可能会涉及到绘
制图形、添加材料属性等操作。
4. 进行计算和验证。
最后,你可以使用CASS9.23D插件进行计算和验证。
你可以通
过插件的界面或者命令行来设置计算参数,并查看计算结果和验证报告。
D安装设置步骤和方法文件管理序列号:[K8UY-K9IO69-O6M243-OL889-F88688]840D安装、设置步骤和方法1. 要求通道1直线轴: X、Y、Z, 工作台: B, 摆头: A, 五轴联动, 主轴: CX1通道2刀库轴: MX1测量系统:X、Y、Z、CX1、MX1用2048线的电机编码器, B A用ROD280 18000线圆编码器611D伺服驱动器:电源模块: 6SN1145-1BA02-0CA1主轴驱动器: 6SN1123-1AA00-0LA1 6SN1118-0DG23-0AA1X、Y、Z、刀库轴驱动器: 6SN1123-1AB00-0BA1 6SN1118-0DM21-0AA0A、B轴驱动器: 6SN1123-1AB00-0CA1 6SN1118-0DM23-0AA0伺服电机:主轴电机: 1PH7137-2ND00-0CA0X、Y、Z 轴伺服电机: 1FT6102-1AC71-4AG1B、A 轴伺服电机: 1FT6084-8AC71-4AA0刀库轴伺服电机: 1FK6063-6AF71-1AA0ND行程:X=0-1220mm, Y=0-915mm, Z=0-915mm,B=0-359.999deg, A=0-105deg, 刀库轴=0-359.999deg最大速度:X=1200mm/min, Y=1200mm/min, Z=1200mm/min, B=4rpm(1440deg/min), A=2rpm(720deg/min), MX1=1rpm(360deg/min), S=1000rpm2. 基本设置2.1 准备硬件接线PLC总清NCU S3拨到1, 按Reset按钮, 完成后将NCU S3拨回0NCK总清NCU S4拨到3, 等PS灯亮后将S4拨到2, 立即再拨到3, 等PS灯闪后将S4拨到0标志: NCU的NC状态指示灯+5V和PLC状态指示灯PR亮(绿色)报警2001 PLC has not started up 和120202、4060显示器显示X1 Y1 Z1 A1四个轴数据机床操作面板MCP和手持单元HHU所有的灯闪亮。
所有S7 PLC电源模块DC 5V绿灯亮611D电源模块绿灯、黄灯亮所有611D驱动器红灯亮NC默认设置:最大方式组 1最大通道数 1最大轴数 5最大插补轴 4无螺距补偿全部轴为直线轴2.2装载PLC基本程序(主要用STEP7 V5.1操作)建立一个新的工程 OM3选择CPU为CPU315-2 DP, MPI Addrees为2, 不自动建立OB1, 工程名为OM3删除OM3的SIMATIC 300 Station目录调入840D PLC组态: PLC?Upload Station选择: Rack = 0, Slot = 0, MPI Address = 2, 完成后删除 FB15 DB1安装ToolBox V6.3, 必须选择PLC-Basic Program for 8x0D V6.3将标准库中gp8x0d63中的所有块拷贝到OM3将OM3的所有块下载到PLC右击Blocks?PLC?Download?OK, 不用装载系统数据NCU Reset标志: MCP灯灭, MCP I/O被定义到IB0—IB7, QB0—QB5, QB8—QB15被MCP占用调用MCP机床控制面板控制程序在OB1里增加一组指令:L DB19.DBB 22 // 取面板显示的通道号T MB 20 // 送给MMC控制程序FC19:ChanNo CALL FC 19BAGNo :=B#16#1 // 方式组1ChanNo :=MB20 // 通道号SpindleIFNo:=B#16#6 // 定义主轴号为7FeedHold :=Q41.0 // 0-Feed Star, 1-Feed Stop SpindleHold :=Q41.1 // 0-Spindle Start, 1-Spindle Stop标志: MCP方式键、复位键、X Y Z 4 轴选择键和+ -方向键有效2.3 基本设置(机床参数)输入维修密码: Start-up?Password?Set password, 输入SUNRISE设置日期和时间: Start-up?PLC?Set date/clock, 输入日期时间后按Accept, 立即生效* PLC日期时间可以在STEP7里设, 而且不影响MMC的日期时间机床参数显示设置: Start-up?Machine data?Display options, 将所有项打勾和Index from 0 to 6 (显示7个轴数据)方式组数: N19220 $ON_NUM_MODE_GROUPS = 1 (默认值)最大通道数: N19200 $ON_NUM_CHANNELS = 2通道1分配给方式组1: N10010 $MN_ASSIGN_CHAN_TO_MODE_GROUP[0]=1 (默认值)通道2分配给方式组1: N10010 $MN_ASSIGN_CHAN_TO_MODE_GROUP[1]=1最大轴数: N19100 $ON_NUM_AXES_IN_SYSTEM = 7插补轴数: N19120 $ON_NUM_IPO_AXES = 5在同一程序行上运行的轴数多于MD19120设定的值(如设为4)时,报警8030 Channel 1 block option ‘interporation of more then 4axis’ not setNCK Reset标志: 按MCP的[1…n]键可以转换通道显示螺距补偿点数: N38000 $MA_MM_ENC_COMP_MAX_POINTS[0,X1] = 25N38000 $MA_MM_ENC_COMP_MAX_POINTS[0,Y1] = 25N38000 $MA_MM_ENC_COMP_MAX_POINTS[0,Z1] = 25N38000 $MA_MM_ENC_COMP_MAX_POINTS[0,A1] = 25N38000 $MA_MM_ENC_COMP_MAX_POINTS[0,B1] = 25 NCK Reset标志: 在Services?Data out的NC.active-data/mers.-system-error-comp.目录里有了mers.-system-error-comp-axis1~5螺距补偿文件报警: 4400 Machine data alteration will cause reorganisation of buffered memory (loss of data!)(将重新分配Memory, NC程序、R参数等将丢失)报警6020 Machine data have been altered – new memory is reorganized (已重新分配Memory)2.4 轴名定义定义机床轴(Machine axes)名称: (在面板上显示的轴名)N10000 $MN_AXCONF_MACHAX_NAME_TAB[0]="X"N10000 $MN_AXCONF_MACHAX_NAME_TAB[1]="Y"N10000 $MN_AXCONF_MACHAX_NAME_TAB[2]="Z"N10000 $MN_AXCONF_MACHAX_NAME_TAB[3]="B"N10000 $MN_AXCONF_MACHAX_NAME_TAB[4]="A"N10000 $MN_AXCONF_MACHAX_NAME_TAB[5]="MX1"N10000 $MN_AXCONF_MACHAX_NAME_TAB[6]="CX1"* TAB[0] 对应Drive 1, TAB[1] 对应Drive 2 …通道1几何轴(Geometry axes)名: (用默认值)N20050 $MC_AXCONF_GEOAX_ASSIGN_TAB[0]=1N20050 $MC_AXCONF_GEOAX_ASSIGN_TAB[1]=2N20050 $MC_AXCONF_GEOAX_ASSIGN_TAB[2]=3N20060 $MC_AXCONF_GEOAX_NAME_TAB[0]="X"N20060 $MC_AXCONF_GEOAX_NAME_TAB[1]="Y"N20060 $MC_AXCONF_GEOAX_NAME_TAB[2]="Z"* MD20050 指定几何轴对应的驱动器* MD20060 指定NC程序用的几何轴名(NC程序用)特定轴(Special axes)名N20070 $MC_AXCONF_MACHAX_USED[0]=1N20070 $MC_AXCONF_MACHAX_USED[1]=2N20070 $MC_AXCONF_MACHAX_USED[2]=3N20070 $MC_AXCONF_MACHAX_USED[3]=4N20070 $MC_AXCONF_MACHAX_USED[4]=5N20070 $MC_AXCONF_MACHAX_USED[5]=7N20080 $MC_AXCONF_CHANAX_NAME_TAB[0]="X"N20080 $MC_AXCONF_CHANAX_NAME_TAB[1]="Y"N20080 $MC_AXCONF_CHANAX_NAME_TAB[2]="Z"N20080 $MC_AXCONF_CHANAX_NAME_TAB[3]="B"N20080 $MC_AXCONF_CHANAX_NAME_TAB[4]="A"N20080 $MC_AXCONF_CHANAX_NAME_TAB[5]="C"* MD20070 必须连续设定,不能中断* MD20070 指定特定轴对应的驱动器, X Y Z轴与几何轴重合* MD20080 指定NC程序用的特定轴名(NC程序用)通道2特定轴(Special axes)名N20070 $MC_AXCONF_MACHAX_USED[0]=6N20080 $MC_AXCONF_CHANAX_NAME_TAB[0]="X"NCK Reset标志: 在通道1里看到了X、Y、Z、B、A、CX1轴, 在通道2里看到了MX1轴2.5 PLC 轴控制程序OB1CALL FC 40 // 轴/主轴控制程序FC40SET= DB21.DBX 25.3 // 通道1: G0用MCP的速率开关= DB21.DBX 6.7 // 通道1: 激活进给轴速率开关= DB21.DBX 6.6 // 通道1: 激活Rapid速率开关= DB22.DBX 25.3 // 通道2: 使G0用MCP的速率开关 = DB22.DBX 6.7 // 通道2: 激活进给轴速率开关= DB22.DBX 6.6 // 通道2: 激活Rapid速率开关= DB31.DBX 1.5 // X轴选第1测量系统= DB31.DBX 2.1 // X轴controller enable= DB31.DBX 21.7 // X轴pules enable= DB31.DBX 1.7 // X轴激活速率开关= DB32.DBX 1.5 // Y轴选第1测量系统= DB32.DBX 2.1 // Y轴controller enable= DB32.DBX 21.7 // Y轴pules enable= DB32.DBX 1.7 // Y轴激活速率开关= DB33.DBX 1.5 // Z轴选第1测量系统= DB33.DBX 2.1 // Z轴controller enable= DB33.DBX 21.7 // Z轴pules enable= DB33.DBX 1.7 // Z轴激活速率开关= DB34.DBX 1.5 // B轴选第1测量系统= DB34.DBX 2.1 // B轴controller enable= DB34.DBX 21.7 // B轴pules enable= DB34.DBX 1.7 // B轴激活速率开关= DB35.DBX 1.5 // A轴选第1测量系统= DB35.DBX 2.1 // A轴controller enable= DB35.DBX 21.7 // A轴pules enable= DB35.DBX 1.7 // A轴激活速率开关= DB36.DBX 1.5 // MX1轴选第1测量系统= DB36.DBX 2.1 // MX1轴controller enable= DB36.DBX 21.7 // MX1轴pules enable= DB36.DBX 1.7 // MX1轴激活速率开关= DB37.DBX 1.5 // CX1轴选第1测量系统= DB37.DBX 2.1 // CX1轴controller enable= DB37.DBX 21.7 // CX1轴pules enable= DB37.DBX 1.7 // CX1轴激活速率开关标志: 1. 手动空转各轴2. 如果设MD20700为0(不必回参考点), 即可进行自动和MDA的空运行2.6 驱动器、电机、实际值输出类型和编码器接口机床参数设置驱动器参数设置Solt Drive Active Drive Module PowerSect Current1 7 Yes ARM(SMD) 1 axis 0D H 45/60/76A2 1 Yes SRM(FDD) 2axis-1 16 H 18/36A3 2 Yes SRM(FDD) 2axis-2 16 H 18/36A4 3 Yes SRM(FDD) 2axis-1 16 H 18/36A5 4 Yes SRM(FDD) 2axis-2 16 H 18/36A6 5 Yes SRM(FDD) 2axis-1 14 H 9/18A7 6 Yes SRM(FDD) 2axis-1 14 H 9/18A按Save保存设置实际值输出类型 (用611D时为1)N30130 $MA_CTRLOUT_TYPE[0,X]=1N30130 $MA_CTRLOUT_TYPE[0,Y]=1N30130 $MA_CTRLOUT_TYPE[0,Z]=1N30130 $MA_CTRLOUT_TYPE[0,B]=1N30130 $MA_CTRLOUT_TYPE[0,A]=1N30130 $MA_CTRLOUT_TYPE[0,MX1]=1N30130 $MA_CTRLOUT_TYPE[0,CX1]=1* 必须设置了MD30130后, 才能设置电机参数驱动器号(模块号)(用默认值)N30220 $MA_ENC_MODULE_NR[0,X]=1N30220 $MA_ENC_MODULE_NR[0,Y]=2N30220 $MA_ENC_MODULE_NR[0,Z]=3N30220 $MA_ENC_MODULE_NR[0,B]=4N30220 $MA_ENC_MODULE_NR[0,A]=5N30220 $MA_ENC_MODULE_NR[0,MX1]=6N30220 $MA_ENC_MODULE_NR[0,CX1]=7编码器接口, 1-用电机编码器, 2-用第二接口N30230 $MA_ENC_INPUT_NR[0,X]=1N30230 $MA_ENC_INPUT_NR[0,Y]=1N30230 $MA_ENC_INPUT_NR[0,Z]=1N30230 $MA_ENC_INPUT_NR[0,B]=1N30230 $MA_ENC_INPUT_NR[0,A]=1N30230 $MA_ENC_INPUT_NR[0,MX1]=1N30230 $MA_ENC_INPUT_NR[0,CX1]=1设置测量系统类型 (正旋波信号为1)N30240 $MA_ENC_TYPE[0,X]=1N30240 $MA_ENC_TYPE[0,Y]=1N30240 $MA_ENC_TYPE[0,Z]=1N30240 $MA_ENC_TYPE[0,B]=1N30240 $MA_ENC_TYPE[0,A]=1N30240 $MA_ENC_TYPE[0,MX1]=1N30240 $MA_ENC_TYPE[0,CX1]=1NCK Reset标志: 在机床参数Drive MD的Axis: 栏里看到了轴名报警:300701 Axis CX1 drive needs setup设置伺服电机参数CX1主轴电机订货号: 1PH7137-2ND00-0CA0X、Y、Z轴伺服电机订货号: 1FT6105-1AC71-4AH0B 、A轴伺服电机订货号: 1FT6102-1AC71-4AA0MX1刀库伺服电机订货号: 1FK6063-6AF7-1AA0各电机都用默认值NCK Reset标志: 所有驱动器灯灭2.7 启动611D电源激活电源模块端口63-Pulse enable, 64-Drive enable(48已常接9)FC100标志: 611D电源模块绿色灯灭可以手动转动电机2.8 PLC回参考点程序 (仅列出X轴, 输入点以后再确定)FC42 // 由OB1调用A I 33.6= DB31.DBX 12.7 // X轴参考点开关A I 6.3 // MCP T13键= DB21.DBX 1.0 // 所以轴自动回参考点标志: 可选择单轴按”+”键不松手回参考点, 或按一下”T13”键所有轴自动回参考点2.9 PLC手持单元HHU控制程序从HHU-Lib里装入HHU控制程序OB100、FC68、DB68、DB69, 将FC68注释里的程序拷贝到OB1NCK Reset标志: 手持单元正常可用(包括脉冲发生器)HHU I/O被定义到输入: DB68.DBB140-DBB145, 输出: DB68.DBB120-DBB139 * HHU显示有些问题2.10 轴类型设置旋转轴或直线轴设置N30300 $MA_IS_ROT_AX[X]=0 直线轴N30300 $MA_IS_ROT_AX[Y]=0 直线轴N30300 $MA_IS_ROT_AX[Z]=0 直线轴N30300 $MA_IS_ROT_AX[B]=1 旋转轴N30300 $MA_IS_ROT_AX[A]=1 旋转轴N30300 $MA_IS_ROT_AX[MX1]=1 旋转轴N30300 $MA_IS_ROT_AX[CX1]=1 旋转轴4070 Normalizing machine data has been alteredN30310 $MA_ROT_IS_MODULO[X]=0 直线轴N30310 $MA_ROT_IS_MODULO[Y]=0 直线轴N30310 $MA_ROT_IS_MODULO[Z]=0 直线轴N30310 $MA_ROT_IS_MODULO[B]=1N30310 $MA_ROT_IS_MODULO[A]=1N30310 $MA_ROT_IS_MODULO[CX1]=1N30310 $MA_ROT_IS_MODULO[MX1]=1N30320 $MA_DISPLAY_IS_MODULO[X]=0 直线轴N30320 $MA_DISPLAY_IS_MODULO[Y]=0 直线轴N30320 $MA_DISPLAY_IS_MODULO[Z]=0 直线轴N30320 $MA_DISPLAY_IS_MODULO[B]=1N30320 $MA_DISPLAY_IS_MODULO[A]=1N30320 $MA_DISPLAY_IS_MODULO[MX1]=1N30320 $MA_DISPLAY_IS_MODULO[CX1]=1* 当MD30310和MD30320同时为0时, 以+ - deg角度显示* 当MD30310和MD30320同时为1或其中之1为1时, 以0-360 deg(行程)显示N30330 $MA_MODULO_RANGE[X]=360 直线轴无意义N30330 $MA_MODULO_RANGE[Y]=360 直线轴无意义N30330 $MA_MODULO_RANGE[Z]=360 直线轴无意义N30330 $MA_MODULO_RANGE[B]=360 deg 有效行程N30330 $MA_MODULO_RANGE[A]=105 deg 有效行程N30330 $MA_MODULO_RANGE[MX1]=360 deg 有效行程N30330 $MA_MODULO_RANGE[CX1]=360 deg 有效行程N30340 $MA_MODULO_RANGE_START[X]=0 直线轴无意义N30340 $MA_MODULO_RANGE_START[Y]=0 直线轴无意义N30340 $MA_MODULO_RANGE_START[Z]=0 直线轴无意义N30340 $MA_MODULO_RANGE_START[B]=0 deg 开始角度N30340 $MA_MODULO_RANGE_START[A]=0 deg 开始角度N30340 $MA_MODULO_RANGE_START[MX1]=0 deg 开始角度N30340 $MA_MODULO_RANGE_START[CX1]=0 deg 开始角度NCK Reset标志: B、A、MX1、CX1显示单位为deg、B、A、MX1显示的值在其行程允许的范围内* B、A、MX1、CX1轴NC程序单位: 距离: deg 速度: deg/min报警:4070 Normalizing machine data has been altered(改MD30300时)主轴设置N35000 $MA_SPIND_ASSIGN_TO_MACHAX[CX1]=1NCK Reset标志: CX1在Override显示为 ==>Spindle可以M3 S60执行指令, 但速率开关是Feed Override有效3. 轴参数调整3.1 各轴公用的参数N11300 $MN_JOG_INC_MODE_LEVELTRIGGRD=0执行回参考点或增量移动时: 0-点一下键即可, 1-压下键直到回参考点或增量移动完成* 自动回参考点功能不受此参数影响通道1N20700 $MC_REFP_NC_START_LOCK=1 0-不必回参考点, 1-必需回参考点才能自动运行通道2N20700 $MC_REFP_NC_START_LOCK=13.2 X、Y、Z 直线轴参数调整X、Y、Z 轴电机都是直接装在丝杆上, 用电机编码器3.2.1 测量系统N31030 $MA_LEADSCREW_PITCH[X]=12.7 mm(1/2英寸) 丝杆的螺距N31030 $MA_LEADSCREW_PITCH[Y]=12.7N31030 $MA_LEADSCREW_PITCH[Z]=12.73.2.2 轴移动方向N32100 $MA_AX_MOTION_DIR[X]=1 (1 , -1)电机旋转方向(1 顺时针转) N32100 $MA_AX_MOTION_DIR[Y]=1N32100 $MA_AX_MOTION_DIR[Z]=13.2.3 回参考点N34000 $MA_REFP_CAM_IS_ACTIVE[X]=1 0-不用回参考点开关, 1-要用回参考点开关N34000 $MA_REFP_CAM_IS_ACTIVE[Y]=1N34000 $MA_REFP_CAM_IS_ACTIVE[Z]=1N34010 $MA_REFP_CAM_DIR_IS_MINUS[X]=1 回参考点方向, 0-正向, 1-反向N34010 $MA_REFP_CAM_DIR_IS_MINUS[Y]=0N34010 $MA_REFP_CAM_DIR_IS_MINUS[Z]=0N34020 $MA_REFP_VELO_SEARCH_CAM[X]=2000 mm/min搜索参考点开关速度, Feed Overrid 有效N34020 $MA_REFP_VELO_SEARCH_CAM[Y]=2000N34020 $MA_REFP_VELO_SEARCH_CAM[Z]=2000N34030 $MA_REFP_MAX_CAM_DIST[X]=1220 mm 搜索参考点开关的最大距离N34030 $MA_REFP_MAX_CAM_DIST[Y]=920N34030 $MA_REFP_MAX_CAM_DIST[Z]=920N34050 $MA_REFP_SEARCH_MARKER_REVERSE[0,X]=0 搜索零脉冲的方向N34050 $MA_REFP_SEARCH_MARKER_REVERSE[0,Y]=0N34050 $MA_REFP_SEARCH_MARKER_REVERSE[0,Z]=0N34040 $MA_REFP_VELO_SEARCH_MARKER[0,X]=300 mm/min 搜索零脉冲的爬行速度N34040 $MA_REFP_VELO_SEARCH_MARKER[0,Y]=300N34040 $MA_REFP_VELO_SEARCH_MARKER[0,Z]=300N34060 $MA_REFP_MAX_MARKER_DIST[0,X]=12.5 mm 搜索零脉冲的最大距离N34060 $MA_REFP_MAX_MARKER_DIST[0,Y]=12.5N34060 $MA_REFP_MAX_MARKER_DIST[0,Z]=12.5N34080 $MA_REFP_MOVE_DIST[0,X]=-2 mm 参考点偏移量1N34080 $MA_REFP_MOVE_DIST[0,Y]=2N34080 $MA_REFP_MOVE_DIST[0,Z]=2N34090 $MA_REFP_MOVE_DIST_CORR[0,X]=0 mm 参考点偏移量2N34090 $MA_REFP_MOVE_DIST_CORR[0,Y]=0N34090 $MA_REFP_MOVE_DIST_CORR[0,Z]=0参考点偏移量, 即零脉冲到参考点的距离=MD34080+MD34090N34070 $MA_REFP_VELO_POS[X]=2000 mm/min 从零脉冲点(停止点)走到参考点的速度N34070 $MA_REFP_VELO_POS[Y]=2000N34070 $MA_REFP_VELO_POS[Z]=20003.2.4 速度参数N32000 $MA_MAX_AX_VELO[X]=12000 mm/min 最大速度N32000 $MA_MAX_AX_VELO[Y]=12000 mm/minN32000 $MA_MAX_AX_VELO[Z]=12000 mm/min* 当设定的速度超过此值时, 即被限制在此速度, 不报警N32010 $MA_JOG_VELO_RAPID[X]=12000 mm/min Rapid 速度N32010 $MA_JOG_VELO_RAPID[Y]=12000 mm/minN32010 $MA_JOG_VELO_RAPID[Z]=12000 mm/minN32020 $MA_JOG_VELO[X]=6000 mm/min Jog速度N32020 $MA_JOG_VELO[Y]=6000 mm/minN32020 $MA_JOG_VELO[Z]=6000 mm/minN32300 $MA_MAX_AX_ACCEL[X]=1 m/s2 加减速N32300 $MA_MAX_AX_ACCEL[Y]=1 m/s2N32300 $MA_MAX_AX_ACCEL[Z]=1 m/s2N35230 $MA_ACCEL_REDUCTION_FACTOR[X]=0 加减速系数N35230 $MA_ACCEL_REDUCTION_FACTOR[Y]=0N35230 $MA_ACCEL_REDUCTION_FACTOR[Z]=0N36200 $MA_AX_VELO_LIMIT[0,X]=14000 mm/min 最大速度极限N36200 $MA_AX_VELO_LIMIT[0,Y]=14000 mm/minN36200 $MA_AX_VELO_LIMIT[0,Z]=14000 mm/min最大速度极限当速度超过此值时, 报警: 25030 Axis x actual velocity alarmN32200 $MA_POSCTRL_GAIN[0,X]=1 速度增益(KV系数)N32200 $MA_POSCTRL_GAIN[0,Y]=1N32200 $MA_POSCTRL_GAIN[0,Z]=13.2.5 位置监控参数(仅列出X轴)N36000 $MA_STOP_LIMIT_COARSE[X]=0.04 mm 粗定位公差N36010 $MA_STOP_LIMIT_FINE[X]=0.01 mm 精定位公差25080 Axis X Positioning monitoringN36012 $MA_STOP_LIMIT_FACTOR[0,X]=1 MD36000、MD36010、MD36030这三个值的系数N36020 $MA_POSITIONING_TIME[X]=1 s 定位时间N36030 $MA_STANDSTILL_POS_TOL[X]=0.2 mm 零速公差N36040 $MA_STANDSTILL_DELAY_TIME[X]=0.4 s 零速公差延迟时间N36050 $MA_CLAMP_POS_TOL[X]=0.5 mm 夹紧公差N36400 $MA_CONTOUR_TOL[X]=1 mm 轮廓公差N36310 $MA_ENC_ZERO_MONITORING[0,X]=0 零脉冲监视, 0-硬件检测, 100-关闭检测N36100 $MA_POS_LIMIT_MINUS[X]=-1 第一软件极限位置(-)N36110 $MA_POS_LIMIT_PLUS[X]=12001 第一软件极限位置(+)**** 轴监视(监控)功能 ****轮廓误差: Contour monitoring当执行一个移动命令(手动或自动)时, 在加速、恒速、减速三个阶段NC对其进行轮廓监控(实际上是监视其跟随误差), 在其轴向的误差Contour deviation (axially)超过MD36400mm时, 报警25050 Contour monitoring零速误差: Zero speed monitoring当移动命令结束后过MD36040秒时(轴还没有停止), NC监视其跟随误差, 超过MD36030mm时报警25040 Asix x standstill monitoring在轴被允许但无移动命令或移动命令结束而且轴已停在MD36010后, NC监控其位移状态, 超过MD36030mm MD36040s后报警25040 Asix x standstill monitoring定位误差:Positioning monitoring当移动命令结束时, NC对其进行定位监控, 在MD36020s内轴不停在MD36010范围内时报警25080 Axis X Positioning monitoring夹紧误差:在轴被允许但无移动命令或移动命令结束而且轴已停在MD36010后, 如果DB31…DBX2.3=1, NC监控其位移状态, 超过MD36050mm时, 报警26000 Clamping monitoring一般夹紧公差MD36050的值比零速公差MD36030的值大注意: 在轴被允许但无移动命令时, 如果轴受外力引起位移, NC将发出相反的移动命令将其拉回原位, 这时也可能报警25050 Contour monitoring、25040 Asix x standstill monitoring、26000 Clamping monitoring3.3 B、A、MX1旋转轴参数调整B轴电转速通过蜗轮蜗杆传递到转台, 速度比=100 , 编码起直接装在转台的轴心上A轴电转速通过齿轮变速传递到摆头, 速度比=50 , 编码起直接装在的摆头轴心上MX1轴电转速通过齿轮变速传递到刀库, 速度比=50 , 用电机编码器3.3.1 测量系统N31050 $MA_DRIVE_AX_RATIO_DENOM[0,B]=1 转台的转数N31050 $MA_DRIVE_AX_RATIO_DENOM[0,A]=1 摆头的转数N31050 $MA_DRIVE_AX_RATIO_DENOM[0,MX1]=1 刀库的转数N31060 $MA_DRIVE_AX_RATIO_NUMERA[0,B]=100 B轴电机转数N31060 $MA_DRIVE_AX_RATIO_NUMERA[0,A]=50 A轴电机转数N31060 $MA_DRIVE_AX_RATIO_NUMERA[0,MX1]=50 MX1轴电机转数3.3.2 轴移动方向N32100 $MA_AX_MOTION_DIR[B]=1 (1 , -1)电机旋转方向N32100 $MA_AX_MOTION_DIR[A]=1N32100 $MA_AX_MOTION_DIR[MX1]=1N32110 $MA_ENC_FEEDBACK_POL[0,B]=1 (1 , -1)移动(实际值输出)方向N32110 $MA_ENC_FEEDBACK_POL[0,A]=1N32110 $MA_ENC_FEEDBACK_POL[0,MX1]=13.3.3 回参考点N34000 $MA_REFP_CAM_IS_ACTIVE[B]=0 0-不用回参考点开关, 1-要用回参考点开关N34000 $MA_REFP_CAM_IS_ACTIVE[A]=0N34000 $MA_REFP_CAM_IS_ACTIVE[MX1]=1* 由于B、A轴用18000线编码器直接装在旋转轴心上, 所以不需要用回参考点开关N34010 $MA_REFP_CAM_DIR_IS_MINUS[B]=1 回参考点方向, 0-正向, 1-反向N34010 $MA_REFP_CAM_DIR_IS_MINUS[A]=1N34010 $MA_REFP_CAM_DIR_IS_MINUS[MX1]=1N34020 $MA_REFP_VELO_SEARCH_CAM[B]=1 rpm 搜索参考点开关速度, Feed Overrid 有效N34020 $MA_REFP_VELO_SEARCH_CAM[A]=1 rpmN34020 $MA_REFP_VELO_SEARCH_CAM[MX1]=1 rpmN34030 $MA_REFP_MAX_CAM_DIST[B]=360 deg 搜索参考点开关的最大距离N34030 $MA_REFP_MAX_CAM_DIST[A]=105N34030 $MA_REFP_MAX_CAM_DIST[MX1]=360N34050 $MA_REFP_SEARCH_MARKER_REVERSE[0,B]=0 搜索零脉冲的方向N34050 $MA_REFP_SEARCH_MARKER_REVERSE[0,A]=0N34050 $MA_REFP_SEARCH_MARKER_REVERSE[0,MX1]=0N34040 $MA_REFP_VELO_SEARCH_MARKER[0,B]=0.5 rpm 搜索零脉冲的爬行速度N34040 $MA_REFP_VELO_SEARCH_MARKER[0,A]=0.5N34040 $MA_REFP_VELO_SEARCH_MARKER[0,MX1]=0.5N34060 $MA_REFP_MAX_MARKER_DIST[0,B]=360 deg 搜索零脉冲的最大距离N34060 $MA_REFP_MAX_MARKER_DIST[0,A]=105N34060 $MA_REFP_MAX_MARKER_DIST[0,MX1]=360N34080 $MA_REFP_MOVE_DIST[0,B]=-5 deg 参考点偏移量1N34080 $MA_REFP_MOVE_DIST[0,A]=5N34080 $MA_REFP_MOVE_DIST[0,MX1]=5N34090 $MA_REFP_MOVE_DIST_CORR[0,B]=0 deg 参考点偏移量2N34090 $MA_REFP_MOVE_DIST_CORR[0,A]=0N34090 $MA_REFP_MOVE_DIST_CORR[0,MX1]=0参考点偏移量, 即零脉冲到参考点的距离=MD34080+MD34090 N34070 $MA_REFP_VELO_POS[B]=2 rpm 从零脉冲点(停止点)走到参考点的速度N34070 $MA_REFP_VELO_POS[A]=2N34070 $MA_REFP_VELO_POS[MX1]=23.3.4 速度参数N32000 $MA_MAX_AX_VELO[B]=4 rpm 最大速度N32000 $MA_MAX_AX_VELO[A]=2N32000 $MA_MAX_AX_VELO[MX1]=1N32010 $MA_JOG_VELO_RAPID[B]=4 rpm Rapid 速度N32010 $MA_JOG_VELO_RAPID[A]=2N32010 $MA_JOG_VELO_RAPID[MX1]=1N32020 $MA_JOG_VELO[B]=2 rpm Jog速度N32020 $MA_JOG_VELO[A]=1N32020 $MA_JOG_VELO[MX1]=0.5N32300 $MA_MAX_AX_ACCEL[B]=1 m/s2 加减速N32300 $MA_MAX_AX_ACCEL[A]=1 m/s2N32300 $MA_MAX_AX_ACCEL[MX1]=1 m/s2N35230 $MA_ACCEL_REDUCTION_FACTOR[B]=0 加减速系数N35230 $MA_ACCEL_REDUCTION_FACTOR[A]=0N35230 $MA_ACCEL_REDUCTION_FACTOR[MX1]=0N36200 $MA_AX_VELO_LIMIT[0,B]=5 rpm 最大速度极限N36200 $MA_AX_VELO_LIMIT[0,A]=3N36200 $MA_AX_VELO_LIMIT[0,MX1]=1.5最大速度极限当速度超过此值时, 报警: 25030 Axis x actual velocity alarmN32200 $MA_POSCTRL_GAIN[0,B]=1 速度增益(KV系数)N32200 $MA_POSCTRL_GAIN[0,A]=1N32200 $MA_POSCTRL_GAIN[0,MX1]=13.3.5 位置监控参数 (仅列出B轴)N36000 $MA_STOP_LIMIT_COARSE[B]=0.04 deg 粗定位公差N36010 $MA_STOP_LIMIT_FINE[B]=0.01 deg 精定位公差N36012 $MA_STOP_LIMIT_FACTOR[0,B]=1 MD36000、MD36010、MD36030这三个值的系数N36020 $MA_POSITIONING_TIME[B]=1 s 定位时间N36030 $MA_STANDSTILL_POS_TOL[B]=0.2 deg 零速公差N36040 $MA_STANDSTILL_DELAY_TIME[B]=0.4 s 零速公差延迟时间N36050 $MA_CLAMP_POS_TOL[B]=0.5 deg 夹紧公差N36400 $MA_CONTOUR_TOL[B]=1 deg 轮廓公差N36310 $MA_ENC_ZERO_MONITORING[0,B]=0 零脉冲监视, 0-硬件检测, 100-关闭检测N36100 $MA_POS_LIMIT_MINUS[B]=-1 deg 第一软件极限位置(-)N36110 $MA_POS_LIMIT_PLUS[B]=15001 deg 第一软件极限位置(+)。