三轴加速度传感器MMA7260
- 格式:pdf
- 大小:383.72 KB
- 文档页数:5
帆板控制系统设计(F题)摘要:本系统以单片机STC12C5A48S2为控制核心及数据处理核心,采用加速度传感器MMA7260作为角度检测的核心器件,设计并制作了一个帆板控制系统。
以L293构成电机的电路,通过对风扇转角的控制,调节风力的大小,改变帆板的转角θ。
可以通过键盘设置帆板转角0~60o,并在LCD上实时显示θ。
使用了PID算法,使系统能快速达到稳定。
由于采用了低功耗单片机,并且使用了一些高性价比、低功耗的器件去设计电路,因此本放大器具有成本低,功耗小,性价比高的优点。
关键词:控制系统;角速度传感器;单片机;PID;一、方案比较与选择题目分析:综合分析题目要求,转动帆板时,实现实时显示角度,且能够通过键盘控制风力,是本题的最大难点,也是设计的重点之一。
另一难点是使帆板转角达到60o。
要得到更好的性能指标,放大电路的零点漂移也是一个很难解决的问题。
此外,在整个电路的设计中,要考虑其成本。
1、数据处理和控制核心选择方案一:采用DSP最小系统板。
即由DSP来实现电机的控制、传感器信号采集和人机界面控制等功能。
方案二:采用单片机STC12C5A48S2最小系统板。
即由单片机STC12C5A48S2实现整个系统的统一控制和数据处理。
本系统不涉及大量的数据存储和复杂处理,虽然方案一控制更灵活更方便,但DSP的资源得不到充分利用,且系统规模大,成本高。
而单片机STC12C5A48S2是一种8位低功耗微、高性能处理器,具有丰富的片上外设和较强的运算能力,且可串口编程,使用十分方便,性价比高。
综上所述,故采用方案二。
2、角度传感器的比较与选择方案一:角度传感器KMZ41与信号调理芯片UZZ9001组成的角度采集模块。
KMZ41与信号调理芯片UZZ9001一起,能够对180°范围内的角度信号进行测量,并利用SPI方式提供11位的角度信号输出。
调试繁琐,且电路稳定性差。
方案二:采用MMA7260三轴加速度传感器。
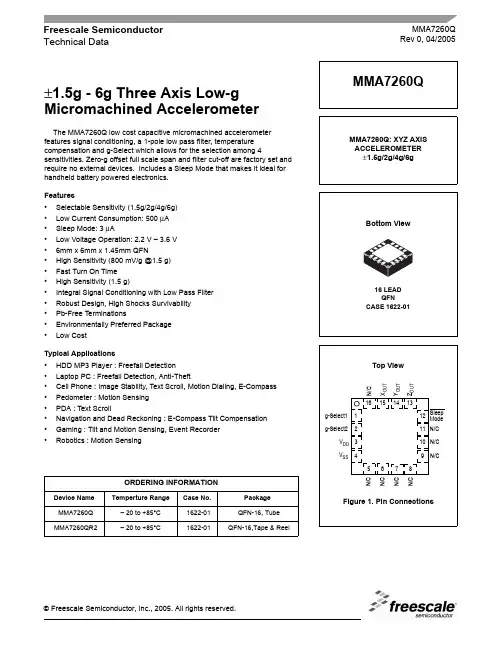
MMA7260三轴加速度传感器
低成本微型电容式加速度传感器采用了信号调理、单极低通滤波器和温度补偿技术,并且提供4个量程可选,用户可在4个灵敏度中的选择。
该器件带有低通滤波并已做零g补偿。
本产品还提供休眠模式,因而是电池充电的手持设备产品的理想之选。
XYZ
• 可选灵敏度(1.5g/2g/4g/6g)
• 低功耗:500 μA
• 休眠模式:3 μA
• 低压运行:V - V
• 6mm x 6mm x 1.45 mm的无引线四方扁平(QFN) 封装;• 高灵敏度(800 mV/g @ 1.5g)
• 快速开启
• 低通滤波器具备内部信号调理
• 设计稳定、防震能力强
• 无铅焊接
• 环保封装
• 成本低
可用在机器人、智能车、自由落体探测、动作探测等场合,具有较高的灵敏度,能进行立体XYZ三轴向检测,使相应设备能智能响应位置、方位和移动的变化。
可用来做评估和研
发。
板子特点:可直接5V供电,兼容51等单片机,也可直接供电,和AVR单片机供用一组电源。
标准的接口间距,可直接插到万用板上。
1、提供1.5g、2g、4g、6g四档加速度量程,灵敏度分别为800、600、300、200mV/g。
板上带量程选择开关。
2 、DIP集成电路型封装,方便扩展。
3、加速度信号输出为模拟电压,用户仅需AD转换即可得到加速度信号!
尺寸:*毫米
三轴加速度传感器功能图解
标准的接口间距,可直接插到万用板上。
基于MMA7260的新型汽车防盗报警系统李蒙1,李刚1,郑羽2(1.天津大学精密仪器与光电子工程学院,天津300072;2.天津工业大学信息与通信工程学院,天津300160)摘要:针对目前汽车防盗报警系统存在的误报、不能检测静态倾角和接口电路复杂等不足,采用MMA7260加速度传感器,结合GSM通信、GPS定位技术,设计并完成了一种新型的汽车防盗报警系统.实验结果表明,基于加权平均方法的系统软件执行效率高,可以准确地检测出包括整车拖运在内的盗窃信息,有效地避免了声波和车辆经过造成的误报,同时实现了车辆状态监控、跟踪定位和车载通信系统.关键词:汽车防盗报警;振动检测;倾角检测;加速度传感器中图分类号:TP271文献标识码:A文章编号:1671-024X(2008)04-0049-04AutomobilesupervisingsystembasedonMMA7260sensorLIMeng1,LIGang1,ZHENGYu2(1.SchoolofPrecisionInstrumentandOpto-ElectronicEngineering,TianjinUniversity,Tianjin300072,China;2.SchoolofInformationandCommunicationEngineering,TianjinPolytechnicUniversity,Tianjin300160,China)Abstract:Todetectobliquity,andavoidmisinformation,perplexinginterfacecircuitexistinginautomobilesupervisingsystem,anewsupervisingsystembasedonMMA7260sensorisdesigned,whichcombinedwithGSMandGPStechniques.Resultsofexperimentshowthatthesoftwarebasedonweightedaveragegoesefficiently,candetectthetheftinformationofcarhaulexactlywithoutmisinformation.Atsametime,vehiclemonitoringandcontrolling,tracingandlocatingandcarphonecommunicationsystemareactualized.Keywords:automobilesupervising;vibrationdetecting;obliquitymeasuring;accelerometer收稿日期:2008-03-07基金项目:国家自然基金基金资助项目(60174032)作者简介:李蒙(1982—),男,硕士研究生;李刚(1959—),男,博士,教授,导师.E-mail:ligang59@tju.edu.cn第27卷第4期2008年8月天津工业大学学报JOURNALOFTIANJINPOLYTECHNICUNIVERSITYVol.27No.4August2008汽车已成为人们生活中不可缺少的一部分,但随着汽车数量增多,车辆被盗的数量也逐年上升,给社会带来极大的不安定因素,车辆被盗成为困扰每一位汽车用户的难题[1].现代汽车的防盗系统通常采用对车体的冲击、振动监测的方式进行防盗预警,常用的器件多为磁效应传感器.虽然磁效应加速度传感器的敏感性能很好,但由于磁传感器存在装配、安装误差,其频率响应不稳定,会造成后续信号处理电路和微控制器接口电路比较复杂,致使系统报警的可靠性降低,误报率较高[2,3].另外,拖车或整车搬运的方法也是目前窃贼盗窃汽车常用的手段,对付这种盗窃方式最有效的方法是对车体的倾斜角度进行监测,而磁效应传感器无法测量静态加速度,不能对车体的倾斜角度进行测量,也就无法对这种盗窃方式进行监测预警.总之,利用磁效应传感器不能很好地完成防盗监测的任务,需要一种更合理、更可靠的传感器件来替代[4,5].针对以上问题,本文引入采用MEMS工艺制作的MMA7260加速度传感器,同时结合GSM通信、GPS定位技术设计完成了一种新型的汽车防盗报警系统[6 ̄8].1系统的硬件组成系统结构如图1所示.该系统硬件上以MC9S08QG8单片机为核心,辅以MMA7260加速度模块、HOLUXGPS模块、TC35iGSM通信模块等实现对汽车的实时监控.单片机利用内置的ADC实时采集加速度模块的信息,当检测到加速度值异常时(车辆被盗),系统会启动警报,同时通过GSM通信模块发送相应信息到车主的手机上.此时车主可以通过手机发送指令到GSM通信模块上,打开天津工业大学学报第27卷图1系统结构框图Fig.1Systemframeworkdiagram车内的监听设备、读取车辆的位置信息、启动高倍声光报警、切断电路和油路,让盗贼无法启动车子,或者启动后自动熄火.在此基础上,增加一个紧急求救按钮,当车主在车内遇到抢劫或其他危险情况时,就可以发送信息到亲友的手机上,以便尽快向警方求助;同时外界也可以通过手机对车辆进行上述控制操作,以方便警方采取正确行动,尽早破案.电源部分平时拟采用车载蓄电池做主电源;一旦主电源被切断,即切换到内置电池供电,进入节能模式,有效工作可达数月以上.1.1MMA7260加速度传感器MMA7260是Freescale公司设计生产的采用MEMS工艺制作的低价格、低功耗、单芯片集成三轴加速度传感器.2.2~3.6V单电源供电,工作电流小于500μA(睡眠模式仅有3μA),可测量0~350Hz、±6g范围内动态或静态加速度,±1.5g量程时分辨率为800mV/g,以模拟电压信号形式输出,体积仅为6mm×6mm×1.45mm;可对车体微小振动和整车倾斜角度同时进行监测.将其应用于汽车防盗系统不但扩大了系统的检测范围,而且简化了系统,提高了防盗系统报警的可靠性.MMA7260内部模块结构如图2所示.MMA7260是在单一芯片上集成3个相互独立、测量方向相互垂直的敏感元的测量模块,是由多晶硅微加工表面工艺制成的电容式加速度传感器,由硅片表面的弹性结构支撑起的质量块下面贴附电容的一个极板,电容的另一极板固定.当加速度引起质量块的相对位置变化时,电容值也发生变化,然后经过电容电压转化电路和放大滤波电路后输出与加速度成正比的电压信号.相对于传统的磁效应传感器,MMA7260加速度传感器的硬件电路极其简单,仅需与ADC之间增加阻容滤波电路,其与微处理器的接口电路如图3所示.需要说明,MMA7260是三轴多量程加速度传感器,在振动检测中灵敏度更加重要,所以系统选用MMA7260的最小量程(±1.5g),此时加速度传感器具有最高的灵敏度(800mV/g).声波振动对加速度值的直接影响极其微弱,引起误报的原因是由于传感器的谐振频率点过低,声波的干扰频率与谐振频率接近引起共振.采用QFN封装的MMA7260加速度传感器的谐振频率在10kHz左右,可有效避免声波谐振造成的误报.另外在加速度输出端与ADC之间增加低通滤波电路,这样就可以滤除加速度传感器的高频响应和电路引入的其它高频干扰.由于后续软件处理还会对高频信号进行抑制,综合考虑了系统的成本、稳定性,选用一阶RC无源低通滤波器(截止频率为100Hz,由1kΩ的金属膜电阻和1μF陶瓷电容构成).1.2TC35iGSM通信模块TC35i是Siemens公司推出的新一代GSM通信模块,其尺寸小巧,安装设计灵活,易于集成且功耗低.如图4所示,其主要由GSM基带处理器、GSM射频模块、供电模块(ASIC)、闪存、ZIF连接器、天线接口6部图2MMA7260QT的内部模块结构Fig.2MMA7260QTfunctionalblockdiagram图3MMA7260与微处理器接口电路图Fig.3InterfacecircuitbetweenMMA7260andMCU50——第4期分组成.TC35i模块通过SCI接口与单片机通信,支持文本和PDU模式的短消息、第三组的二类传真、以及2.4kHz、4.8kHz、9.6kHz的非透明模式.单片机通过AT命令集对其进行读、写等操作,这样就可以突破空间限制,将车辆信息通过GSM网络传送至全球各地,同时接收用户手机的控制指令对车辆实施控制.2系统的软件组成系统主要包含4种工作状态:停车状态、行驶状态、被盗状态和被抢状态.如图5所示,单片机首先判别停车状态和行驶状态,这主要依靠密钥识别技术实现.密钥识别有很多种,系统采用了射频识别技术(RFID,radiofrequencyidentification).在停车模式下,单片机会依次检测振动信息、倾角信息、车门信息、点火信息、人员信息是否正常,系统将综合上述信息判断车辆状态.如果判断结论为车辆被盗,则系统进入被盗模式,发送被盗信息给车主,控制权交予车主;如果结论是车辆正常,则系统回到起始状态,再次循环.在行驶模式下,系统将不断检测求救按钮是否按下,如果求救按钮按下,车辆将进入被抢模式.系统会首先将信息发送到指定的手机号码上(例如车主朋友),然后控制权交给控制中心.控制权限包括查询车辆的位置、车内的人员信息,还可以启动高分贝声光报警,关闭发动机,关闭车窗,断油断电等操作.3盗窃信息的检测和干扰的滤除3.1振动、倾角信息的检测系统需要从加速度信息中提取出以下3种信息:撬锁时车体振动、车门打开时的加速度信号、车辆的倾角变化.它们的波形如图6所示.图6不同状态下的加速度信息Fig.6Accelerationindifferentstates图5系统软件流程图Fig.5Softwareflowchartforsystem李蒙,等:基于MMA7260的新型汽车防盗报警系统上电自检51——天津工业大学学报第27卷在正常情况下,如图中的平稳区所示,X、Y、Z3个方向的加速度基本不变(但是有轻微的扰动).有人撬锁时,加速度值会出现一个减幅震荡的过程,震荡的周期很短,只有十几个毫秒.而在车门打开的过程中,加速度值会出现一个很大的变化,并且持续的时间较长,能达到上百个毫秒.经分析可以发现,撬锁振动和车门打开时的加速度值都与加速度变化的速度有关,更适合用差分来表示;倾角的变化只与加速度值变化的大小有关,而与变化的速度无关,可以直接用当前的加速度来表示.假设ADC采样量化后的加速度值为a(i),则差分后的加速度变化量为b(i)=a(i)-a(i-1),当b(i)大于设定的阈值后系统就可以认为有偷盗行为发生.与振动检测不同,倾角的变化只与加速度的变化量有关.对于倾角的检测可以通过即时加速度值与平稳状态时加速度值做差得到,设初始加速度值为a(0),则当a(i)-a(0)的绝对值大于设定值时即可认为倾角变化超标,启动报警.初始加速度值a(0)为停车模式启动时的加速度值,由于初始值不是一个固定的常量,这样就可以根据停车位置(比如斜坡处)设定不同的初始值.另外,初始加速度值a(0)和即时加速度值a(i)也不是单次采样值,系统采用20次采样平均加速度值,这样就可以有效地避免振动对倾角的干扰.3.2声音、周围车辆干扰等误报信息的滤除由图6可知,声波造成的振动多集中在高频段内(kHz),周围车辆经过造成的振动多集中在低频段内(10Hz以下),而撬锁、暴力打开车门等盗窃信息则介于二者之间(几十Hz).本文选取适当的盗窃信息特征时间,而不是单纯依靠加速度峰值越界作为车辆被盗的依据.将若干相邻项的值加权平均,这样声波频率较高,几个周期的变化相互抵消,加权后的值很小;车辆经过造成的振动周期很长,短时间内的加权值也很小;而盗窃信息的加权值则较大,通过加权后的值比较就可以滤除声波干扰和附近车辆经过造成的振动.假设加速度差分处理后的值为b(i),系统采用5项加权平均,权系数为M1、M2、M3、M4、M5,则加权平均处理后的值c(i)=[M1xa(i-2)+M2xa(i-1)+M3xa(i)+M4xa(i+1)+M5xa(i+2)]/(M1+M2+M3+M4+M5),多次试验得到权系数为1、1、3、1、1时效果最好.4结束语实验表明,该防盗报警系统可以有效地检测出车体振动和车体倾角的变化,同时有效地抑制了声波、附近车辆经过等干扰.针对干扰信息和有用信息的频带分布不同,采用加权平均的处理方法可以大大减小微处理器的工作量,程序完全可以运行于普通的8位单片机下.与传统汽车防盗报警系统比较,新系统具有以下特点:(1)同时测量振动信息和倾角信息,并针对声音、车辆经过等产生的干扰信息进行有效的滤波处理.该系统不仅可以准确检测出包括整车拖运在内的盗窃信息,而且有效避免了声波和车辆经过造成的误报.(2)结合现代GSM数字移动通信和GPS全球定位技术,实现对车辆状态监控、调度、防盗报警、防劫报警、远程控制、跟踪定位、车载电话等功能.(3)系统通过CAN总线接入整车电子系统,既可以共享车载电话、GPS定位系统,大幅降低应用成本;又易于实现对车辆的控制,如检测到盗窃行为时可以执行断油、断电、关闭车窗等操作.参考文献:[1]张会娟,朱瑞祥,吴峰.汽车防盗装置的现状及展望[J].公路与汽运,2005,(6):4-5.[2]朱华.现代汽车防盗系统[J].公安交通科技窗,2007,(4):11-13.[3]黄河,刘银峰,李辉.汽车防盗系统研究[J].微计算机应用,2002,(1):14-16.[4]金仁成,朱连柱,于耀东.加速度传感器在汽车防盗系统中的应用研究[J].电子技术应用,2006,(4):91-93.[5]BELIVEAUA,SPENCERGT,THOMASKA.EvaluationofMEMScapacitiveaccelerometers[J].Design&TestofComput-ers,1999,(10):21-22.[6]LITAI,CIOCIB,VISANDA.AnewapproachofautomobilelocalizationsystemusingGPSandGSM/GPRStransmission[J].ElectronicsTechnology,2006,(6):42-43.[7]GOGOIBP,MLADENOVICD.IntegrationtechnologyforMEMSautomotivesensors[J].IECON02IndustrialElectronicsSociety,2002,(11):26-28.[8]徐东峰,刘波峰,唐圣学.射频识别芯片TMS3705在汽车智能防盗报警装置中的应用[J].国外电子元器件,2004,(4):4-7.52——。
应好朋友们的要求,这两天研究了一下传说中神奇的三轴加速度计,下面写一篇关于三轴加速度计的使用例程,说到三轴加速度计还真是个好东西,可以检测运动中的物体的加速度,可以对物体的运动姿态和运动方向进行检测,在WII和IPHONE中都有典型应用,在Nokia的N95中更是得到了从分的开发利用。
这个三轴加速度计用的是Freescale(飞思卡尔)公司生产性价比高微型电容式加速度传感器MMA7260芯片。
用三轴加速度计利用重力分量换算原理,来测量角度与其他数字量倾角传感器相比自然要精准许多,因为模拟量的,可将电压值换算对应倾斜角度值,所以在许多需要测量角度的场合,非运动的条件下,不妨可以试试使用加速度计。
下面就是MMA7260三轴加速度计的结构图解这里有必要说一下G1和G2,很多人有疑问,这是怎么选择的呢?其实这里很简单,G1和G2两位数字量输入4种组合代表4中量程。
G1 G2 量程选择灵敏度选择0 0 1.5g 800mV/g0 1 2g 600mV/g1 0 4g 300mV/g0 1 6g 200mV/g下面就做一个小实验,简单的输出测得的模拟值,我们通过将模拟值转换成电压值再参考MMA7260芯片手册就可以得知物体的姿态或者角度了。
我将X、Y、Z三接口分别接到Arduino的模拟0、1、2接口,EN使能和3.3V短接,我将G1和G2悬空即取默认值。
下面是一段简单的读取模拟值的程序intxpin=0;intypin=1;intzpin=2;int n;int m;int i;void setup(){Serial.begin(9600);}void loop(){n=analogRead(xpin);m=analogRead(ypin);i=analogRead(zpin);Serial.print("x=");Serial.print(n);Serial.print(" ");Serial.print("y=");Serial.print(m);Serial.print(" ");Serial.print("z=");Serial.println(i);delay(500);}我先将三轴加速度计水平(如上图)放置,又竖直放置,得到以下两组模拟值,参考MMA7260芯片手册,可知测量的物体状态均正确,这就大功告成啦!水平放置读出模拟值竖直放置读出模拟值程序很简单,朋友们也可编写一些带算法的程序,将模拟值转换成相应的角度,直接输出角度值。

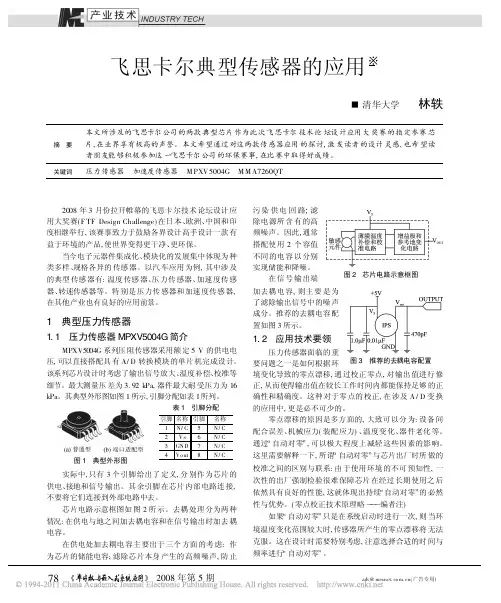
美国MOTOROLA压力传感器美国MOTOROLA公司的MPX系列硅压力传感器,主要以气压测量为主,适合用于医疗器械,气体压力控制等领域,输出数字信号。
其测量方式可分为:表压(GP)、绝压(A、AP)、差压(D、DP)型。
在宽温度范围工作时需外加补偿网络和信号调整电路。
具体型号分类而定名称:MPX2010DP 名称:MPX5700DP MPX5700GP 名称:MPX2100AP名称:MPX5500DP 名称:MPX5100AP 名称:MPX5050DP名称:MPX5010DP 名称:MPX4115AP 名称:MPX2200A 名称:MPX2200AP 名称:MPXH6115A6U 名称:MPX4250DP名称:MPX4115A 名称:MPX2202DP 名称:MPX2102AP名称:MPX2053GP 名称:MPXY8300A6U 压力传感器 名称:触力型压力传感器 FSG15N1A 名称:硅压力传感器 MPXH6115A 名称:MPX5700DP 硅压力传感器 名称:MPX53GP 硅压力传感器 名称:压力传感器FPM07 名称:轮胎压力传感器TP015 名称:轮胎压力传感器NPP301名称:Freescale 压力传感器 MPX2010DP商斯达实业传感器与智能控制分公司专门从事各种进口传感器的营销工作,代理多家欧美知名公司的产品。
涉及压力、温度、湿度、电流、液位、磁阻、霍尔、流量、称重、光纤、倾角、扭矩、气体、光电、位移、触力、红外、速度、加速度等多种产品。
广泛应用于航空航天、医疗器械(如血压计)、工业控制、冶金化工、汽车制造、教育科研等领域。
商斯达实业代理的品牌产品主要有:压 力:Kulite、ACSI、Honeywell、Entran、Gems、Dwyer、SSI、Smi、Senstronics、Intersema、Motorola、 NAIS、E+H、Fujikura、Dytran、APM称重测力:Transcell、HBM、Interface、Thamesside、Philips、Entran 温 湿 度:Honeywell、Dwyer流 量:Gems、Dwyer、Honeywell、Folwline、WorldMagnetics 液 位:Honeywell、Siccom、Gems、Dwyer、Kulite、SSI 加 速 度:Entran、Silicondesigns、Dytran 压力开关:ACSI、Gems、Dwyer、台湾矽微航空器材:TexTech 隔音材料、Honeywell 薄膜加热片、DigirayX 射线探伤仪 仪 表:Honeywell、Transcell、东辉、上润、AD、东崎商斯达实业 除代理上述产品外,还有几条传感器生产线,一条压力传感器组装线,可为用户提供各种用途的、特殊要求的配套产品。
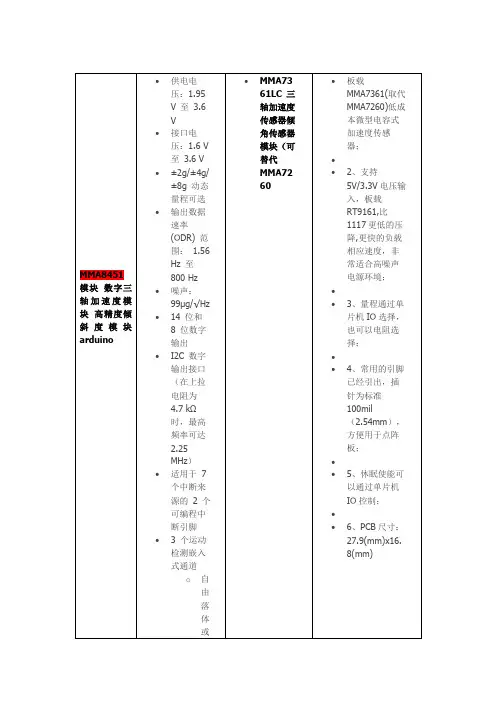
MMA8451模块数字三轴加速度模块高精度倾斜度模块arduino •供电电压:1.95V 至3.6V•接口电压:1.6 V至 3.6 V•±2g/±4g/±8g 动态量程可选•输出数据速率(ODR) 范围: 1.56Hz 至800 Hz•噪声:99μg/√Hz•14 位和8 位数字输出•I2C 数字输出接口(在上拉电阻为4.7 kΩ时,最高频率可达2.25MHz)•适用于7个中断来源的 2 个可编程中断引脚• 3 个运动检测嵌入式通道o自由落体或•MMA7361LC 三轴加速度传感器倾角传感器模块(可替代MMA7260•板载MMA7361(取代MMA7260)低成本微型电容式加速度传感器;••2、支持5V/3.3V电压输入,板载RT9161,比1117更低的压降,更快的负载相应速度,非常适合高噪声电源环境;••3、量程通过单片机IO选择,也可以电阻选择;••4、常用的引脚已经引出,插针为标准100mil(2.54mm),方便用于点阵板;••5、休眠使能可以通过单片机IO控制;••6、PCB尺寸:27.9(mm)x16.8(mm)。
三轴加速度传感器使用说明 DreamFactory1MMA7260 Sensor Users ManualDreamfactory 梦工厂MMA7260 Sensor Users ManualTEL:(北京)庄先生 010-******** (成都)卫先生 159******** (上海)桑先生 137********MMA7260 三轴加速度传感器北京龙凡汇众机器人科技有限公司 E_mail:service@机器人梦工厂 机器人梦工厂三轴加速度传感器使用说明 DreamFactory2MMA7260 SensorA. 注意!在没有认真阅读本说明之前,请勿给模块加电!错误接线将导致模块永久性损坏或烧毁微控制器。
注意!请认真查看引脚功能说明,正确接线!请勿将电源反接,否则将导致模块永久性损坏。
注意!请勿使用超出额定电压的电源!保证电源的稳定,如果出现高压脉冲,可能会导致微控制器永久性损坏。
注意!本产品无防水防潮功能,请在干燥环境下保存和使用!严禁将重物堆积在上面。
B.C.D.MMA7260 三轴加速度传感器北京龙凡汇众机器人科技有限公司 E_mail:service@机器人梦工厂 机器人梦工厂三轴加速度传感器使用说明 DreamFactory3概 述三轴加速度传感器是一种可以对物体运动过程中的加速度进行测量的电子设备,典型互动应用中的加速度传感 器可以用来对物体的姿态或者运动方向进行检测,比如 WII 游戏机和 iPhone 手机中的经典应用。
Arduino 三轴加速度传感器采用 Freescale(飞思卡尔)公司生产的高性价比微型电容式三轴加速度传感器 MMA7260 芯片,对于普通的互动应用来讲应该是种不错的选择,可以应用到摩托车和汽车放倒报警、遥控航模、游 戏手柄、人形机器人跌倒检测、硬盘冲击保护、倾斜度测量等场合。
MMA7260 采用信号调理、单极低通滤波器和温度补偿技术,提供±1.5g /2g/4g/6g 四个量程,用户可在 这 4 个灵敏度中选择。
自平衡小车设计摘要这些年来,两轮自平衡车的应用获得了十分快速的应用和发展。
本文提出了一种两轮的自平衡小车的设计,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统在制作完成后,各个模块之间能够协调工作,小车也可以在无人干预的条件下达到自主平衡。
同时在引入适量的干扰情况下小车也能够自主调整状态并迅速恢复稳定的状态。
小车可以被控制实现前进、后退、左右转向等动作。
关键词:自平衡stm32 姿态滤波IDesign of Self-Balance VehicleAbstractIn recent years, the application of two wheeled self balancing vehicle has been very rapid application and development. In this paper, we propose a two rounds of self balance car design, car attitude detection device by gyroscope enc-03 and MEMS accelerometer MMA7260 and Kalman filtering is used to complete data of a gyroscope and accelerometer meter data fusion. The system selects the flying thought Carle 16 bit single chip microcomputer MC9S12XS128 as the control core, completed the sensor signal processing, the filter algorithm realization and the vehicle body control, human computer interaction and so on.After the completion of the entire system, the various modules can work in coordination, the car can also be under the conditions of unmanned intervention to achieve self balancing. At the same time in the introduction of the amount of interference in the case of the car can also adjust the state and quickly return to a stable state. The car can be controlled to achieve forward, backward, left and right steering and so on.Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusionII目录1.绪论 (1)1.1研究背景与意义 (1)1.3本文主要研究目标与内容 (1)1.4论文章节安排 (2)2.系统原理分析 (3)2.1控制系统要求分析 (3)2.2平衡控制原理分析 (3)2.3自平衡小车数学模型 (4)2.3.1两轮自平衡小车受力分析 (4)2.3.2自平衡小车运动微分方程 (7)2.4 PID控制器设计 (8)2.4.1 PID控制器原理 (8)2.4.2 PID控制器设计 (9)2.5姿态检测系统 (10)2.5.1陀螺仪 (10)2.5.2加速度计 (11)2.5.3基于卡尔曼滤波的数据融合 (12)2.6本章小结 (14)3.系统硬件电路设计 (15)3.1 MC9SXS128单片机介绍 (15)3.2单片机最小系统设计 (17)3.3 电源管理模块设计 (19)3.4倾角传感器信号调理电路 (20)3.4.1加速度计电路设计 (20)3.4.2陀螺仪放大电路设计 (20)3.5电机驱动电路设计 (21)3.5.1驱动芯片介绍 (22)3.5.2 驱动电路设计 (22)III3.6速度检测模块设计 (23)3.6.1编码器介绍 (23)3.6.2 编码器电路设计 (24)3.7辅助调试电路 (25)3.8本章小结 (25)4.系统软件设计 (26)4.1软件系统总体结构 (26)4.2单片机初始化软件设计 (26)4.2.1锁相环初始化 (26)4.2.2模数转换模块(ATD)初始化 (27)4.2.3串行通信模块(SCI)初始化设置 (28)4.2.4测速模块初始化 (29)4.2.5 PWM模块初始化 (30)4.3姿态检测系统软件设计 (30)4.3.1陀螺仪与加速度计输出值转换 (30)4.3.2卡尔曼滤波器的软件实现 (32)4.4平衡PID控制软件实现 (34)4.5两轮自平衡车的运动控制 (35)4.6本章小结 (37)5. 系统调试 (38)5.1系统调试工具 (38)5.2系统硬件电路调试 (38)5.3姿态检测系统调试 (39)5.4控制系统PID参数整定 (41)5.5两轮自平衡小车动态调试 (42)5.6本章小结 (43)6. 总结与展望 (44)6.1 总结 (44)6.2 展望 (44)参考文献 (45)IV附录 (46)附录一系统电路原理图 (46)附录二系统核心源代码 (47)致谢 (50)V常熟理工学院毕业设计(论文)1.绪论1.1研究背景与意义近应用意义。
加速度计测倾角的原理分析及系统设计实现1.1 物理原理加速度计的默认受力轴为水平方向,即水平放置轴向上受到的拉力为0,加速度a为0。
(图1)当加速度计产生倾斜时,受力轴的轴线与水平线会产生大小为θ的夹角,从而在轴线方向受到大小为的F=Mgcosθ重力分量,轴线上加速度a为gcosθ。
不同的倾斜角度下,加速度计受力轴所受到的力的大小不同。
θ在0到90度的范围内a与θ存在着一一对应的关系。
因此a与θ还存在如下形式关系:arccos(a)=θ可以通过测量F的大小得到θ的值,即倾斜角的大小。
1.2 MMA726 工作原理加速度计MMA726具有三个加速度感应轴,感应方向两两垂直(图2)所示。
用于感应物体的运动和方向,根据物体运动和方向改变输出电压值。
各个轴的信号在不运动或者不被重力作用的状态下(0g),其输出为 1.65V。
如果沿着某一个方向活动,或者受到重力作用,输出电压就会根据其运动方向以及设定的传感器灵敏度而改变其输出电压。
加速度计灵敏度由两个开关S1、S2连接的电阻控制,电阻大小选择在1kΩ到3.3kΩ之间。
具体情况见表1。
1.3 倾角的测量将加速度计静止的放在所要测量的p2 AD转换2.1 A/D转换器A/D转换器是一种用来将连续的模拟信号转换成适合于数字处理的二进制器件。
A/D转换器的输入有两种,即模拟输入信号V(in)和参考电压V(ref);其输出是一组二进制数。
可以认为,A/D转换器是一个将模拟信号值编码制成对应的二进制的编码器。
常用的A/D转换器有:双积分式、逐位比较式及并行直接比较式等几种。
2.2 A/D转换方法本系统利用的是A VR芯片,内部集成有一个10位逐次比较ADC 电路。
因此,使用A VR可以非常方便地p3 系统设计3.1 流程设计本系统实现倾角测量的流程为:加速度计通过感应重力的变化输出连续的模拟信号,将这一信号连接A/D转换设备。
A/D转换设备再将模拟信号转化成数字信号,并将这一信号经过单片机I/O口输入到单片机内部。
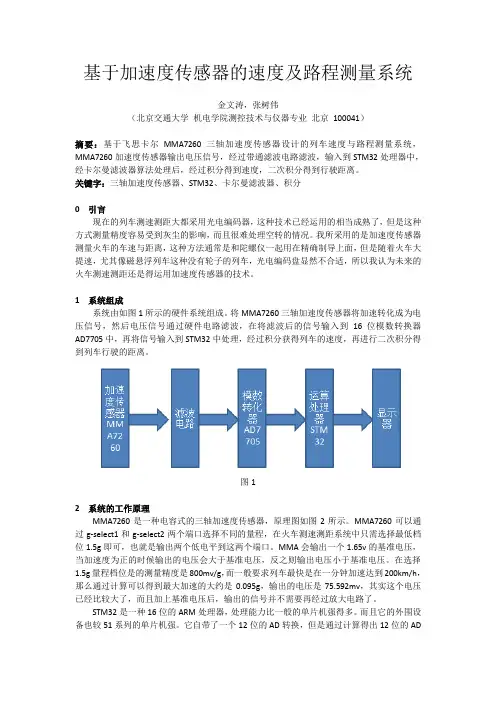
基于MMA7260Q的脚步信号采集系统设计摘要:对脚步信号采集进行了设计,建立了基于ADμC7022型单片机脚步信号采集系统,脚步信号采集运用MMA7260Q三轴加速度的传感器,取脚步信号在X、Y、Z三轴方向上的加速度。
微控制器ADμC7022 收集到加速度传感器输出信号后,运用片上自带ADC完成电压信号到加速度数据的切换并处理信号,当单片机采集到连续两个周期的脚步信号,则说明已采集到可靠的脚步信号。
该脚步信号采集系统具有体积小巧、成本低廉、高精度采集等优点。
关键词:脚步信号MMA7260Q ADμC70221 引言在基于脚步声信号的采集系统中,为了能准确的提取脚步信号的特征,更好的处理脚步信号的数据,采用三轴加速的传感器采集脚步信号。
考虑到嵌入式系统低功耗、低成本和小体积,且符合测试精度和速度的要求。
故选择美国Freescale公司的加速度传感器MMA7260Q[1],并采用ADI公司基于ARM7TDMI 32位RISC内核的精密模拟微控制器ADμC7022[2]实现脚步声信号的采集。
2 硬件规划为了实现小体积,所有的器件都采用贴片封装的形式。
基于低功耗的考虑,尽可能使用低功耗电子元件。
本系统采用高性能锂电池供电。
为使电池的寿命尽可能拉长,所有芯片工作都在3.3V电压,防止开关损耗过大;在传感器静止后,微控制器软件将切换到睡眠模式,从而更加减少功耗。
基于以上考虑,本设计采用MMA7260Q三轴加速度传感器采集脚步信号的加速度,微控制器ADμC7022进行控制和模数转换。
3 传感器模块MMA7260Q是支持X,Y,Z三轴向集成加速度的传感器,它由重力g感应单元,时钟信号发生器,C to V转换器,振荡器,积分放大滤波器,微调电路和温度补偿电路等组成,MMA7260Q加速度传感器提供了多种加速度测量范围,其量程可在±1.5g、±2g、±4g和±6g 加速度中选择,通过g-Select1和g-Select2输入引脚与单片机的连接确定重力加速度量程和其灵敏程度。
MMA7260三轴加速度传感器模块使用说明欢迎使用智能车制作网站推出的MMA7260三轴加速度传感器模块,请在使用前仔细阅读以下内容:一.介绍MMA7260三轴加速度传感器模块核心为飞思卡尔公司的MMA7260三轴加速度传感器,它具有灵敏度可选,低功耗,高稳定性等特点,适用场合有倾角检测,跌落检测,移动检测,防盗检测等,可应用于机器人控制,车体控制,移动电话,笔记本,计步器等诸多方面。
该模块设计为对称三角形,其背面设置有量程选择跳线和3.3V稳压器,板卡线路经过高电磁兼容设计和优化,具有外观独特,体积小,工作可靠,调试倾角方便等特点。
模块主要参数如下。
灵敏度:1.5g/2g/4g/6g可选功耗:500uA(工作模式)/3uA(休眠模式)工作电压:3.3V(直接向芯片供电)/5V(通过板子背面稳压器供电)输出特性:X,Y,Z三轴加速度模拟量输出相关配件供应商---南京寒竹电子(实体店,可开正规发票)二.引脚尺寸及其说明1.X,Y,Z---加速度传感器三轴模拟量输出;2.GS1,GS2(g-Select1,g-Select2)----灵敏度量程选择,设置方法见下表:3.MODE---使能设置,高电平加自此端口模块工作,低电平则休眠;4.3.3V,5V ----模块供电端,可直接通过3.3V端向模块供电,也可通过5V后通过模块背面的3.3V稳压器向模块供电;5.GND---地。
相关配件供应商---南京寒竹电子(实体店,可开正规发票)三.模块三轴分布示意图与典型电压输出四.接线说明与原理图下图为模块与控制器连接示意图,图中的电容电阻模块已经集成,不用在加。
控制器的P0,P1,P2分别控制模块的使能与量程,但也可不接,通过模块背面的跳线电阻进行设置,本模块有两种型号,一种背面已经焊接跳线电阻,一种未焊相关配件供应商---南京寒竹电子(实体店,可开正规发票)接,请根据需要购买。
模块的X,Y,Z接至控制器的AD转换器引脚,进行电压采集,为避免干扰接线应尽可能短。
MMA7260 三轴加速度传感器使用手册
一、MMA7260QT的简介
MMA7260QT低成本微型电容式加速度传感器,采用了信号调理、单极低通滤波器和温度补偿技术,并且提供4个量程可选,用户可在4个灵敏度中的选择。
该器件带有低通滤波并已做零g补偿。
本产品还提供休眠模式,因而是电池充电的手持设备产品的理想之选。
二、特性:
(1) 可选灵敏度(1.5g/2g/4g/6g)
(2) 低功耗:500 μA
(3) 休眠模式: 3 μA
(4) 低压运行:2.2 V - 3.6 V
(5) 6mm x 6mm x 1.45 mm的无引线四方扁平 (QFN) 封装;
(6) 高灵敏度(800 mV/g @ 1.5g)
(7) 快速开启
(8) 低通滤波器具备内部信号调理
(9) 设计稳定、防震能力强
(10) 无铅焊接
(11) 环保封装
(12) 成本低
三、典型应用:
三轴加速度传感器是一种可以对物体运动过程中的加速度进行测量的电子设备,典型互动应用中的加速度传感器可以用来对物体的姿态或者运动方向进行检测,比 如其中WII和iPhone中的经典应用。
Nokia最新推出的手机N95利用内置的加速度传感器,让用户可以通过机身的摆动进行各种操作,包括主菜单操 作、图片浏览、切歌操作甚至进行游戏的控制等,非常全面,甚至超越了苹果 iPhone的动作感应功能的应用范畴。
基于Freescale公司MMA7260的这个三轴加速度传感器,对于普通的互动应用来讲应该是一个不错的选择, 可以用于摩托车和汽车防盗报警器,遥控航模,游戏手柄,跌倒探测,硬盘冲击保护,倾斜角度测量,电梯安全监控等需要测试加速度的地方。
四、MMA7260转接板引脚使用说明:
引脚号:符号:注解:
Pin-01 Z Z模拟输出;
Pin-02 Y Y模拟输出;
Pin-03 X X模拟输出;
Pin-04 G1 量程选择控制GS1(mma7260的pin1);
Pin-05 G2 量程选择控制GS2(mma7260的pin2);
Pin-06 5V 5V供电源的正极(只选其一,5v/3.3v);
Pin-07 NC 悬空;
Pin-08 3V3 3.3V供电源的正极(只选其一,5v/3.3v);
Pin-09 GND 供电源的负极;
Pin-010 SL 休眠模式控制(mma7260的pin12:sleep mode);
电路板尺寸: 20mm * 13mm
五、MMA7260加速度传感器测量范围的档位选择。
重量选择引脚说明
G2选择 G1选择 G的量程选择范围 G的重量灵敏度
0 0 1.5g 800mV/g
0 1 2g 600mV/g
1 0 4g 300mV/g
1 1 6g 200mV/g
注解:0:表示低电平;1:表示高电平;
六、MMA7260传感器X、Y、Z这三个轴所对应的方向关系如下图所示:
七、MMA7260三轴加速度传感器在不同的状态下的输出电压:
八、部分程序
/*=============================================================================
//项目名称: MMA7260三轴传感器模块程序例程
//功能描述: LCD1602显示数据
//使用软件: AVR ICC
//使用芯片: ATMEGA8‐8PU(DIP28封装,双列直插封装)
//外部时钟: 8MHz
//开发人员: 新动力电子
//开发日期: 2010.04.10
=============================================================================*/
#include <iom8v.h>
#include <math.h>
#include <macros.h>
#define uint unsigned int
#define uchar unsigned char
#define BIT_CTRL_PORT PORTC
#define BIT_CTRL_DDR DDRC
//MMA7260控制端口
#define G1 (1<<PC3)
#define G1_H BIT_CTRL_PORT|=G1
#define G1_L BIT_CTRL_PORT&=~G1
#define G2 (1<<PC4)
#define G2_H BIT_CTRL_PORT|=G2
#define G2_L BIT_CTRL_PORT&=~G2
#define SL (1<<PC5)
#define SL_H BIT_CTRL_PORT|=SL
#define SL_L BIT_CTRL_PORT&=~SL
int xValue = 0;//得到x轴大小
int yValue = 0;//得到Y轴大小
int zValue = 0;//得到Z轴大小
int xv_dis = 0; // 显示x轴输出电压(单位10mV)
int yv_dis = 0; // 显示Y轴输出电压(单位10mV)
int zv_dis = 0; // 显示Y轴输出电压(单位10mV)
九、电路图
十、三轴加速度传感器实验
MMA7260实验1
MMA7260实验2。