步进电机选型计算
- 格式:xls
- 大小:330.50 KB
- 文档页数:4
步进电机选型计算方法步进电机是一种能将输入脉冲信号转化为角位移的电机。
它具有结构简单、控制精度高、启动扭矩大等优点,广泛应用于机械系统中的定位控制、速度调节、角度控制等领域。
在选型过程中,需要考虑步进电机的型号、参数和性能等因素。
本文将介绍步进电机选型的计算方法。
步进电机的型号和参数步进电机通常由两个参数决定,即步距角和相数。
步距角指的是电机每接受一个脉冲信号所转动的角度。
常见的步距角有 1.8度(200步/转)和0.9度(400步/转)两种。
步距角越小,电机的定位精度越高。
相数指的是电机的相数,常见的有2相、4相、6相等。
相数越多,电机的转矩平稳性越好。
步进电机的性能步进电机的性能包括静态转矩、动态转矩、最大转速等指标。
静态转矩是指电机在静止状态下能够提供的最大转矩,动态转矩是指电机在运转过程中能够提供的最大转矩。
最大转速是指电机能够达到的最高转速。
选型时需根据具体的应用需求来确定这些指标。
步进电机的负载特性负载特性包括电机扭矩-速度曲线和转动惯量。
电机扭矩-速度曲线描述了电机在不同速度下的输出扭矩和输入电流的关系,可以用来评估电机的运行稳定性。
转动惯量描述了电机转动时的惯性大小,通常是根据系统的加速度和位置控制要求来确定的。
步进电机的选型计算方法主要包括定位精度、动态响应性能以及转矩要求三个方面。
1.定位精度计算步进电机的定位精度受到步距角、齿距、电机的误差等因素的影响。
根据具体的应用需求,可以采用以下公式来计算定位精度:定位精度=N*U/360其中,N为步数(一转的步数),U为脉冲数2.动态响应性能计算动态响应性能主要包括加速度曲线和最大速度两个方面。
加速度曲线是根据系统的加速度和行程要求来确定的。
最大速度则取决于电机的最大转速和负载特性。
3.转矩要求计算转矩要求主要是根据负载的特性来确定的。
计算转矩要求时需要考虑负载的惯性、摩擦力、载荷等因素。
综合考虑以上因素,可以选择合适的步进电机。
通常情况下,需要进行多个步进电机比较和试验,以找到最适合应用需求的电机。
步进电机选型计算公式
步进电机选型计算公式主要包括以下三个方面:
1. 计算步进电机的理论步数。
步进电机的理论步数是由电机的步距角以及驱动方式(单相、双相、四相等)决定的。
计算公式为:
理论步数= 360°/步距角×驱动方式
其中,步距角是指电机每一步转动的角度。
2. 计算步进电机的负载转矩。
负载转矩是指在实际工作过程中,电机需要承受的负载力矩。
该值会影响到电机的运行状态和驱动能力。
计算公式为:
负载转矩= 负载力×距离臂长
其中,负载力是指电机需要承受的负载力,距离臂长是指负载力所作用的杠杆臂长度。
3. 计算驱动电流大小。
驱动电流是指通过步进电机的电流大小,直接影响到步进电机的稳定工作和驱动效率。
计算公式为:
驱动电流= 负载转矩÷转矩系数
其中,转矩系数是一个常量,代表驱动电流和电机扭矩之间的关系。
这个值可以根据不同型号的驱动器进行调整。
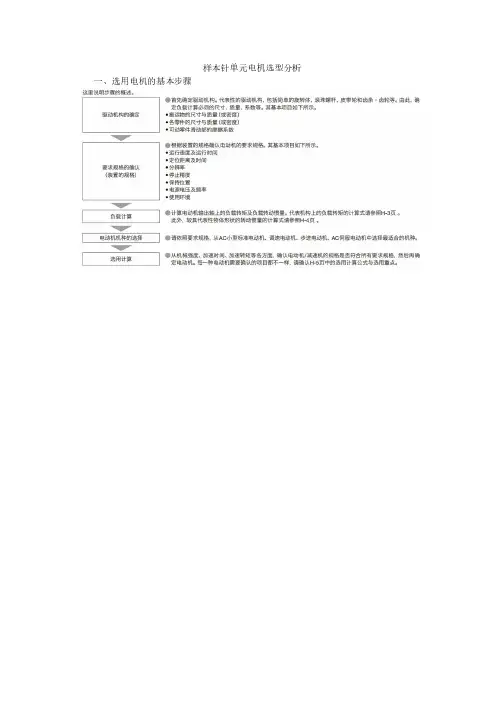
样本针单元电机选型分析一、选用电机的基本步骤四、电机选用计算公式1.运行模式选用加减速运行模式。
2.工作脉冲数A【脉冲】计算步进电机步距角/度 1.8同步轮直径r/mm13.37位移l/mm65时间t0/s0.8A=[65/(3.14*13.37)]*(360/1.8)=1.55*200=310脉冲细分脉冲数:A0细分3104细分12408细分248016细分4960附图:3.运行脉冲频率f2【Hz】计算T0=0.8s,得t1=0.8*0.25=0.2s4.加减速常数T R 【ms/kHz】计算(控制器使用,可以忽略)T R =0.2/(512-f1)5.运行脉冲频率f2【Hz 】的运行速度N M 【r/min 】计算6.负载转矩T L计算7.加速转矩Ta【N*m】计算(1)负载转动惯量J L转动惯量(Moment of Inertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母/或J表示。
其量值取决于物体的形状、质量分布及转轴的位置。
该机构做直线往复运动,滑轨与滑块之间存在缝隙,所以,在急停的瞬间会产生转动。
因此,该结构的惯量包括两部分:直线运动惯量和旋转转动惯量。
A.直线运动惯量计算将整个水平探针机构默认为一个整体,1.1Kg。
A m J13.37*3.14/1000=0.042 1.149.2*10-6B.转动惯量计算。
图中指出来的器件是偏心器件,其余按照同轴心计算。
a.电机距+同步轮离同步轮中心线距离是:80mm,电机长宽高42*42*38,M=0.46kg;J1=0.46((42*42+42*42)/3+80*80)/1000000=3484*10-6b.探针组件中心线距离是:62mm,M=0.46kg;J2=0.46((25*25+25*25)/3+62*62)/1000000=1959*10-6 c.滑轨+拖链+同步轮+轴+固定板中心线距离是:64mm,M=0.29kg,;J3=0.29*(55*55+280*280+12*64*64)/12/1000000=3156*10-6d.其他器件其他器件默认为偏心12mm,质量0.29Kg。
步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
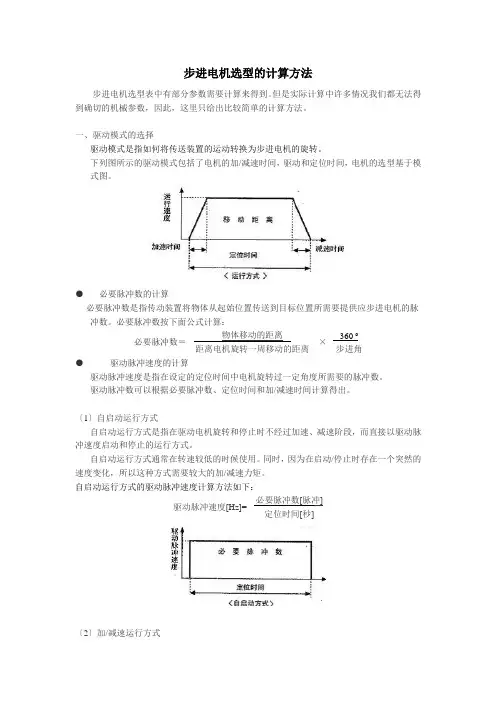
一、驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下列图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供应步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
〔1〕自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数[脉冲] 定位时间[秒]〔2〕加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后到达正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 定位时间[秒]-加/减速时间[秒]二、电机力矩的简单计算例如必要的电机力矩=〔负载力矩+加/减速力矩〕×安全系数●负载力矩的计算〔TL〕负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
步进电机的选型及计算方法步进电机是一种将电脑指令转化为机械运动的电机,广泛应用于打印机、绘图仪、数控机床、自动化设备等领域。
步进电机的选型和计算方法是确保电机能够满足使用要求的重要环节。
本文将介绍步进电机的选型和计算方法,以帮助读者了解如何正确选择步进电机。
**一、步进电机的选型**选型是步进电机设计的第一步,主要考虑以下几个因素:1.**载荷特性**:首先需要知道电机所需驱动的载荷特性,包括重量、转动惯量等。
根据载荷特性,选取适当的电机功率和扭矩。
2.**运动要求**:了解运动要求,包括速度、加速度、定位精度等。
根据运动要求,选取适当的步进角和步数。
3.**工作环境**:考虑工作环境的温度、湿度、粉尘、振动等因素,选取能够适应工作环境的电机。
4.**可靠性要求**:根据应用的可靠性要求,选取有良好可靠性的步进电机。
5.**成本**:考虑成本因素,选取能够满足需求且价格合理的电机。
选型过程中,通常需要参考制造商提供的电机规格书和技术手册,以获取详细的电机参数信息。
**二、步进电机的计算方法**1.**功率计算**:选择适当的功率可确保步进电机能够正常工作。
功率计算公式如下:功率(W)=扭矩(N·m)×转速(RPM)/9.54882.**扭矩计算**:根据应用的载荷特性计算步进电机所需的最大扭矩。
扭矩计算公式如下:扭矩(N·m)=载荷转动惯量(kg·m²)×角加速度(rad/s²)其中,角加速度可根据速度和加速度计算得到:角加速度(rad/s²)=加速度(rad/s²)/ 微步数(步)3.**速度计算**:根据应用的速度要求,计算步进电机的理论最大速度和可用的速度范围。
理论最大速度可按照电机额定的最大转速计算。
通常步进电机的最大转速范围在100-5000RPM之间。
可用速度范围受到供电电压、电机驱动方式、驱动电流等因素的影响。
步进电机选型惯量计算公式步进电机是一种将电脉冲信号转换为机械位移的电机,它的运动是通过控制电流的大小和方向来实现的。
在实际应用中,步进电机的选型是非常重要的,其中惯量是一个重要的参数。
本文将介绍步进电机选型中惯量的计算公式,帮助读者更好地理解步进电机的特性和选型方法。
步进电机的惯量计算公式如下:J = (Jm + Jl) (N^2)。
其中,J表示步进电机的总惯量,Jm表示电机自身的转动惯量,Jl表示负载的转动惯量,N表示减速比。
步进电机的惯量是指电机在转动过程中所具有的惯性,它的大小直接影响着电机的动态响应和控制精度。
在实际应用中,通常需要根据具体的负载情况和控制要求来选择合适的步进电机,而惯量就是一个重要的考虑因素。
首先,我们来看一下步进电机的转动惯量Jm。
步进电机的转动惯量是指电机自身在转动过程中所具有的惯性,它与电机的结构和材料有关。
通常情况下,可以通过电机的技术参数来获取Jm的数值。
在选型过程中,需要根据具体的应用要求来确定Jm的大小,以确保电机的动态响应和控制精度满足要求。
其次,我们来看一下负载的转动惯量Jl。
负载的转动惯量是指负载在转动过程中所具有的惯性,它与负载的结构和材料有关。
在实际应用中,通常需要通过实验或者仿真来获取Jl的数值。
在选型过程中,需要将负载的转动惯量考虑在内,以确保电机能够满足负载的要求。
最后,我们来看一下减速比N。
减速比是指电机输出轴的转速与驱动轴的转速之比,它与传动装置的结构和参数有关。
在实际应用中,通常需要根据负载的要求和控制精度来确定减速比的大小。
在选型过程中,需要将减速比考虑在内,以确保电机能够满足负载的要求。
综上所述,步进电机的惯量计算公式可以帮助我们更好地理解步进电机的特性和选型方法。
在实际应用中,需要根据具体的负载情况和控制要求来选择合适的步进电机,并将惯量考虑在内,以确保电机能够满足要求。
希望本文能够对读者有所帮助,谢谢!。
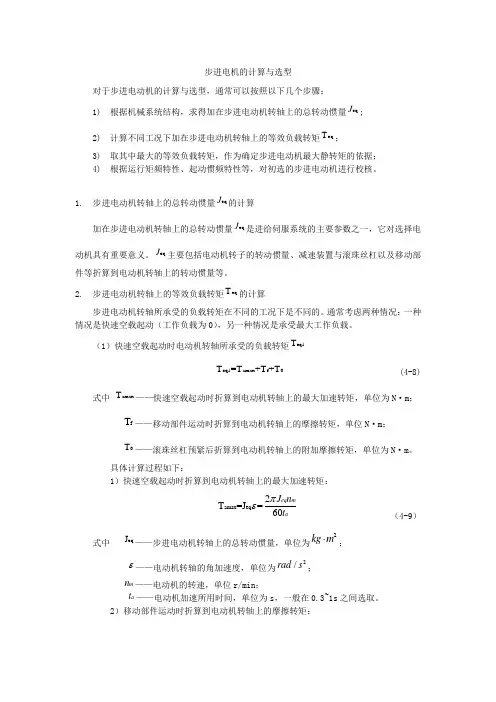
步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2i πη (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
步进电机的计算与选型
步进电机的计算和选型主要涉及以下几个方面:
1. 负载转矩计算:首先需要计算所需驱动的负载转矩。
根据应用需求和机械系统的要求,确定所需的最大持续转矩和加速度转矩。
2. 步进角度:步进电机的旋转角度由步进角决定,常见的步进角有1.8°和0.9°。
选择合适的步进角取决于应用的精度要求和控制系统的分辨率。
3. 步进电机类型:根据具体应用需求,选择合适的步进电机类型,如单向旋转、双向旋转、混合磁体等。
4. 推动方式:根据控制系统的要求和应用场景,选择合适的推动方式,如全步进模式(Full-Step)、半步进模式(Half-Step)或微步进模式(Microstep)等。
5. 驱动器选择:根据步进电机的额定电流、驱动电压和控制方式选择合适的驱动器。
驱动器应具备适当的功率、保护功能和接口兼容性。
6. 总负载惯量计算:考虑到驱动系统的动态响应和稳定性,需要计算总负载的惯性矩,确定所需的步进电机的惯性矩和加速度能力。
7. 工作环境:根据具体工作环境的要求,考虑步进电机的外形尺寸、防护等级、工作温度范围等因素。
8. 可靠性和寿命:了解步进电机的可靠性指标和寿命预期,以确保合适的使用寿命和可靠性。
在进行步进电机的选型时,需要结合上述因素进行综合考虑,并根据实际需求和应用环境选择合适的步进电机。
此外,还应注意与步进电机相关的控制系统、反馈系统和机械传动系统的匹配性,以实现良好的性能和稳定运行。
最好咨询专业的电机供应商或工程师以获取更准确的建议和选择。
步进电机的选型与计算步进电机是一种常见的电动机类型,广泛应用于各种自动控制系统中。
步进电机以其结构简单、运动精确和控制方便的特点,被广泛应用于打印机、数控机床、机器人等领域。
在选择步进电机和进行计算时,需要考虑以下几个方面:步进角度、扭矩、电流、电压、转速和加速度。
本文将对步进电机的选型和计算进行详细介绍。
1.步进角度选择步进电机通常有两种步进角度可选:1.8度和0.9度。
其中1.8度步进角度的电机更为常见,但如果需要更高的运动精度,可以选择0.9度步进角度的电机。
步进角度越小,电机一圈的步数越多,运动精度也就越高。
2.扭矩选择扭矩是步进电机的输出能力,通常由电机的尺寸和电流决定。
选择合适的扭矩需要考虑应用场景下的负载情况。
如果负载较大或需要较大的运动力矩,需要选择具有较大扭矩的电机。
3.电流选择4.电压选择选择步进电机的电压需要考虑到驱动器的额定电压。
步进电机的电压应该与驱动器能够提供的电压匹配,以确保电机正常工作。
通常,选择合适的电压可以提高电机的响应速度和运动精度。
5.转速和加速度选择在进行步进电机的计算时,可以根据具体的参数和公式进行计算。
以下是步进电机常用的几个计算公式:1.步进电机的转速计算公式:转速 = 频率× 步进角度× 60(单位:rpm)2.步进电机的转矩计算公式:转矩=功率/转速(单位:Nm)3.步进电机的加速度计算公式:加速度 = (最终速度 - 初始速度)/ 时间(单位:rad/s²)这些公式可以根据具体的参数进行灵活计算,以满足不同应用场景的需求。
总结起来,步进电机的选型和计算需要考虑步进角度、扭矩、电流、电压、转速和加速度等因素。
根据具体的应用场景需求,选择合适的步进电机,并进行相关参数的计算,以满足项目的设计要求。
步进电机选型的计算示例一、必要脉冲数和驱动脉冲数速度计算的示例下面给出的是一个3相步进电机必要脉冲数和驱动脉冲速度的计算示例。
这是一个实际应用例子,可以更好的理解电机选型的计算方法。
1.1 驱动滚轴丝杆如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟,则必要脉冲数和驱动脉冲速度的计算方法如下:必要脉冲数=10010×360°1.2°=3000[脉冲]如果采用自启动方式驱动1秒钟,则驱动脉冲速度应该这样计算:3000[Pulse]/1[sec]=3[kHz]但是,自启动速度不可能是5kHz,应该采用加/减速运行方式来驱动。
如果加/减速时间设置为定位时间的25%,启动脉冲速度为500[Hz],则计算方法如下:驱动脉冲速度[Hz]=3000[脉冲]-500[Hz]×0.25[秒]1[秒]-0.25[秒]=3.8 [kHz]如图所示:1.2驱动传动带如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟。
驱动轮的周长即旋转一圈移动的距离大约为50[mm]。
因此,所需要的必要脉冲数为:必要脉冲数=110050×360°1.2°=6600 [脉冲]所需参数同上例驱动滚轴丝杆,采用加/减速运行模式,则驱动脉冲速度为:驱动脉冲速度[Hz]=6600[脉冲]-500[Hz]×0.25[秒]1[秒]-0.25[秒]=8.7 [kHz]如图所示:二、负载力矩的计算示例(T L)下面给出的是一个3相步进电机负载力矩的计算示例。
这是一个实际应用例子,其中的数字公式有助于更好的理解电机选型的应用。
2.1滚轴丝杆驱动水平负载如下图,滚轴丝杆驱动水平负载,效率为90%,负载重量为40千克,则负载力矩的计算方法如下:T L=m·P B2πη×1i[kgf·cm]T L=40[kg]×1[cm]2π×0.9×11=7.07 [kgf·cm]2.2传送带驱动水平负载传送带驱动水平负载,效率为90%,驱动轮直径16毫米,负载重量是9千克,则负载力矩的计算方法如下:T L=D2×m ×1η×1i[kgf·cm]T L=1.6 [cm]2×9 [kg] ×10.9×11=8 [kgf·cm]2.3滚轴丝杆和减速器驱动水平负载如下图,滚轴丝杆螺距为5毫米,效率为90%,负载重量为250千克,则负载力矩的计算方法如下:T L=m·P B2πη×1i[kgf·cm]T L=250[kg]×0.5[cm]2π×0.9×110=2.21 [kgf·cm]这是水平方向负载的计算结果,如果是垂直方向的负载,则力矩应该是此结果的2倍,而且此结果仅包括负载力矩,电机的总负载还应该包括加/减速力矩,但是,计算中很难得到准确的负载惯性惯量,因此,为了解决这个问题,在实际计算负载力矩的时候,特别是自启动或需要迅速加/减速的情况,我们应该在此基础上再乘以一个安全系数。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1) 式中φ ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T×1.02×10ˉ2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
数控系统控制电机的启动频率与负载转矩和惯量有很大关系,其估算公式为fq=fq0[(1-(Mf+Mt))/Ml)÷(1+Jt/Jm)] 1/2 (1-7)式中fq---带载起动频率(Hz)fq0---空载起动频率Ml---起动频率下由矩频特性决定的电机输出力矩(N.m)若负载参数无法精确确定,则可按fq=1/2fq0进行估算.(5)运行的最高频率与升速时间的计算。
由于电机的输出力矩随着频率的升高而下降,因此在最高频率时,由矩频特性的输出力矩应能驱动负载,并留有足够的余量。
步进电机选型的计算示例步进电机是一种将电脉冲转化为机械角度的装置,广泛应用于工业自动化领域。
选型步进电机时,需要考虑以下几个方面的因素:1.载荷特性:首先需要确定所需驱动的载荷特性,包括转动惯量、负载扭矩和转速等。
这些参数会决定步进电机的尺寸大小、型号和驱动电流等。
2.加速度和减速度:根据需要的加速度和减速度来选择步进电机。
通常情况下,较大的转动惯量需要更大的电机和更高的驱动电流,以实现较快的加速和减速。
3.驱动方式:根据具体应用的要求来选择驱动方式,主要有全步进驱动和微步进驱动两种。
全步进驱动具有较大的转动角度,而微步进驱动可以实现更精细的位置调整。
4.电磁噪声:步进电机在工作时会产生电磁噪声,需要考虑噪声水平是否符合所需应用的要求。
下面以一个实际应用的计算示例来说明步进电机的选型过程。
假设需要选型的应用为驱动一个转动惯量为0.5 kg·m²的载荷,要求达到最大转速为300 RPM,加速度为5000 RPM/s,减速度为8000RPM/s。
根据这些参数,我们可以按照以下步骤进行步进电机的选型计算:1. 确定负载扭矩:载荷的转动惯量可以根据实际情况或者相关设计手册得到。
假设转动惯量为0.5 kg·m²,可根据公式T=Jα 计算所需的平均扭矩。
其中,T为负载扭矩,J为转动惯量,α为加速度。
根据给定的加速度为5000 RPM/s,可得到平均扭矩T=Jα=0.5kg·m²×5000RPM/s=2500 N·m。
2.确定最大扭矩:最大扭矩一般是平均扭矩的2-3倍,以确保电机在加速和减速时能够提供足够的动力。
假设最大扭矩为平均扭矩的2倍,即最大扭矩为5000N·m。
3.确定转速范围:根据要求的最大转速为300RPM,可以根据实际情况选择合适的步进电机型号。
一般来说,步进电机的最大转速会在数据手册中给出。
4.确定驱动电流:驱动电流的大小与所需的扭矩和转速有关。
步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2F i πη摩h P (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
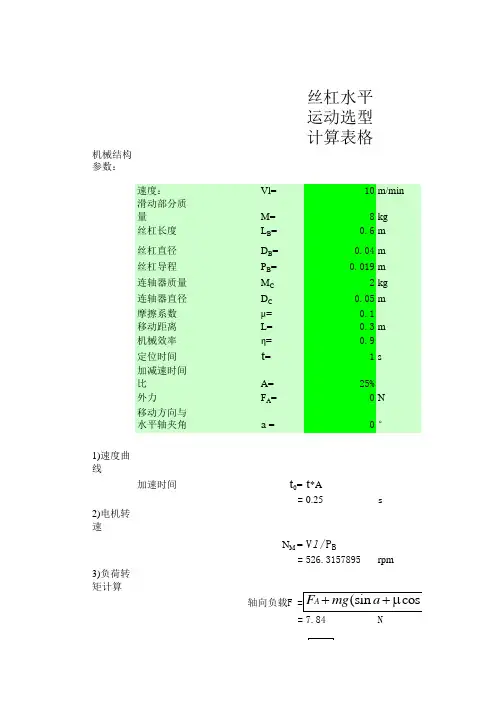
机械结构参数:
皮带与工作物总质量m L =0kg *滑动面摩擦系数μ=0.3*滚筒直径D=0.157m
*滚筒质量
m 2=1kg *传送带和滚筒的机械效率η=0.9*减速机机械效率ηG =0.7减速比i=
1*每次定位时间t=0.2s *每次运动距离L=0.09m *加减速时间比A=50%*外力
F A =0N *
移动方向与水平轴夹角
a =
0°
1)速度曲线
加速时间
t 0=t*A
=0.1
s
2)电机转速
减速机输出轴角加速度 β=
114.65rad/s 2
减速机输出轴转速N=109.4821rpm 电机输出轴角加速度
βM =i*β
=114.6497rad/s 2
电机输出轴转速
N M =N*i
=109.4821rpm
3)计算负载转矩
减速机轴向负载
F==0N 减速机轴负载转矩
T L =
0Nm
电机轴负载转矩
T LM =
皮带轮间歇运动选型计算表格
(sin cos )A F mg a a ++μ2F D
η
L
G
T i η
=0Nm 4)计算电机轴加速转矩(克服惯量)
皮带和工作物的惯量J M1
=0kgm 滚筒的惯量J M2=
=0.003081kgm2
J M1+2J M2
=0.006162kgm
2
全负载惯量J=
=0.006432kgm2电机轴加速转矩
T S
Nm
5)必须转矩
必须转矩T M=(T LM+T S)*S
= 2.107015Nm
6)负荷与电机惯量比
惯量比
=22.82315折算到减速机轴的负载惯量 J L=
2
2
()
2
()
2
L
L
D
D
π
π
2
2
1
8
m D
M
Jβ
g=
9.8m/s pi=
3.1416
算表格
电机惯量J M=0.00027kgm2安全系数S=2。