汽车倒车雷达预警系统的设计及实现
- 格式:doc
- 大小:1.95 MB
- 文档页数:59
万方数据隰鲢淀黧得到褥、院貌塞关涮汽车电子器发出40kHz的脉冲超声波。
当超声波遇到障碍物发生反射,3.2报警与显示反射波f回波1返回到超声波传感器上。
反射回的正弦波信号经微处理器直接控制声光报警电路和LCD显示电路。
LCD过放大、滤波、整形后输入单片机的IN哟,产生中断。
尽管发射液晶屏上以数字的形式显示汽车与障碍物的距离,用“嘀”声的部分的脉冲电压比较高。
但是由回波触发的接收压电晶片在近不同频率来提示车尾与障碍物远近的危险程度。
当障碍物距离距离时产生毫伏级的射频电压信号,在远距离时更小。
因此在汽车尾部2.5m时。
开始有报警信号,但信号间隔时间长,“嘀”距离较远的情况下回波很弱,转换为电信号的幅值也较小,为的声音舒缓,指示条亮绿灯,随着距离的缩短,信号问隔的时间此需将该回波信号放大几千倍。
信号经放大、整形后,电路产生也缩短,在1.5m处,“嘀”的声音由舒缓逐渐为急促,指示灯亮一个负脉冲使微处理器产生中断。
黄灯;在1.0m处,“嘀”的声音变得短而急促,指示灯亮红灯;当发送与接收电路原理图如图3所示。
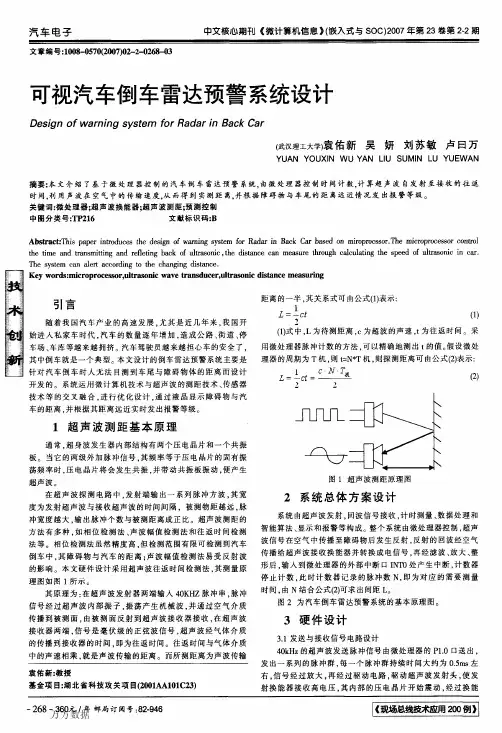
液晶屏上显示0.5m时,屏幕上的数据不再变化,“嘀”的声音变:微处理器:l………●图2汽车倒车雷达预警系统原理图=微处理器图3发送与接收电路原理图电路原理图信号仿真结果如图4,图5所示。
图4超声波发送接收信号仿真图5单片机接收信号仿真成长鸣。
指示灯亮红灯且不停闪烁.再次警告驾驶者避免距离过小而来不及采取措施。
显示部分用一块16"2的字符型LCD模块,它的读写操作、屏幕和光标的操作都是通过指令编程来实现的。
在该系统中,它主要是用来显示开机画面.显示障碍物体与车尾的距离。
液晶屏显示结果如图6所示:图6液晶显示器显示结果5软件设计倒车雷达预警系统软件流程图如图7所示。
圈图7软件主程序流程图国营自控搠邮局订阅号:82_946360_7L/_269—万方数据 万方数据可视汽车倒车雷达预警系统设计作者:袁佑新, 吴妍, 刘苏敏, 卢曰万, YUAN YOUXIN, WU YAN, LIU SUMIN, LU YUEWAN 作者单位:430070,武汉,武汉理工大学西院自动化学院刊名:微计算机信息英文刊名:EMBEDDED SYSTEM & SOC年,卷(期):2007,23(5)被引用次数:4次1.金濠芷.王明时现代传感器技术 19952.袁希光传感器技术工册 19963.张友德.赵志英.涂时亮单片微型计算机原理与试验 20004.赵广涛.程荫杭基于超声波传感器的测距系统设计[期刊论文]-微计算机信息 2006(01)1.吴琼.封维忠.马文杰汽车倒车雷达系统的设计与实现[期刊论文]-现代电子技术 2009(9)2.陶志文.李斌一种基于无线CCD的汽车倒车辅助系统[期刊论文]-微计算机信息 2009(8)3.杜晓.ZHANG Chong-xiong基于SOPC技术的车辆电子后视镜系统设计[期刊论文]-微计算机信息 2008(23)4.谭进怀.冯地耘.陈立万超声波语音测距系统在车辆避障中的应用[期刊论文]-微计算机信息 2008(2)本文链接:/Periodical_wjsjxx200705109.aspx。
倒车雷达报警系统方案1. 简介倒车雷达报警系统是一种用于辅助驾驶的装置,通过使用超声波传感器检测车辆周围的障碍物,并通过发出声音和光信号来提醒驾驶员。
本文将介绍倒车雷达报警系统的方案。
2. 系统组成倒车雷达报警系统主要由以下几个部分组成:2.1 超声波传感器超声波传感器是倒车雷达报警系统的核心部件,它通过发射超声波并接收其反射信号来测量离障碍物的距离。
常见的超声波传感器工作频率为40kHz,可以实现对车辆周围的障碍物进行精确探测。
2.2 控制单元控制单元是倒车雷达报警系统的中央处理装置,负责接收超声波传感器的信号,并判断是否需要触发报警。
控制单元还可以与车辆的倒车灯接口连接,实现与倒车灯的同步工作。
2.3 报警装置报警装置可以通过声音和光信号来提醒驾驶员车辆周围的障碍物。
声音信号可以通过蜂鸣器或喇叭发出,光信号可以通过LED灯或指示灯来实现。
报警装置的设计应当考虑到驾驶员在不同环境下的感知能力,以及对驾驶员的干扰程度。
3. 系统工作流程倒车雷达报警系统的工作流程如下:1.控制单元启动,并初始化超声波传感器。
2.超声波传感器发射超声波,接收反射信号,并将距离数据传输给控制单元。
3.控制单元根据距离数据判断是否需要触发报警。
4.若距离小于设定的安全距离,控制单元触发报警装置。
5.报警装置发出声音和光信号,提醒驾驶员注意车辆周围的障碍物。
4. 系统特点倒车雷达报警系统具有以下几个特点:•实时性:倒车雷达报警系统能够实时地监测车辆周围的障碍物,及时提醒驾驶员。
•灵敏度:超声波传感器能够精确测量离障碍物的距离,保证报警的准确性。
•稳定性:倒车雷达报警系统采用可靠的控制单元和传感器,具有较高的稳定性和可靠性。
•可扩展性:倒车雷达报警系统可以与其他辅助驾驶系统集成,实现更高级的功能。
5. 安装与应用倒车雷达报警系统可以安装在车辆的后保险杠上,通过接入车辆电源和倒车灯接口来实现工作。
在日常行驶中,当车辆倒车时系统会自动启动,监测并提醒驾驶员。
10汽车倒车雷达系统设计汽车倒车雷达系统是一种非常重要的汽车安全辅助系统,它能够有效地帮助驾驶员在倒车时避免碰撞和保护车辆周围的行人和物体免受损害。
本文将介绍汽车倒车雷达系统的设计原理、工作流程以及如何选择和安装倒车雷达系统。
一、设计原理汽车倒车雷达系统的设计原理是利用超声波传感器来探测车辆周围的障碍物,通过测量超声波反射的时间来计算障碍物的距离和位置。
当系统检测到障碍物距离车辆过近时,会发出警告声或显示警告信息,提醒驾驶员及时采取行动。
二、工作流程汽车倒车雷达系统的工作流程通常包括以下几个步骤:1.探测障碍物:当车辆进入倒车状态时,倒车雷达系统开始工作,探测车辆周围的障碍物。
2.计算距离:系统通过测量超声波反射的时间来计算障碍物离车辆的距离,并将距离信息显示在车载显示屏上。
3.发出警告:当系统检测到障碍物距离车辆过近时,会发出持续的警告声或显示警告信息,提醒驾驶员及时采取行动。
4.辅助倒车:一些高端的倒车雷达系统还配备有辅助倒车功能,可以通过声音提示或图像指引帮助驾驶员完成倒车动作。
三、选择和安装选择适合自己车辆的倒车雷达系统非常重要,以下是选择和安装倒车雷达系统的一些建议:1.选择适合车辆尺寸和需求的倒车雷达系统,一般应选择覆盖车辆四周的全方位探测系统,以确保倒车时能够全面监测周围环境。
2.选择品质可靠的倒车雷达系统品牌,尽量选择有着较好口碑的品牌产品,保证系统的稳定性和可靠性。
3.在安装倒车雷达系统时,确保传感器位置合适,能够覆盖到车辆四周的障碍物,避免“盲区”出现。
4.确保电源连接正确,传感器安装牢固,避免在行驶过程中因传感器脱落或松动而影响系统的正常工作。
5.使用前仔细阅读使用说明书,熟悉系统的操作方法和功能,以充分发挥倒车雷达系统的作用,并提高倒车时的安全性。
综上所述,汽车倒车雷达系统是一种非常有效的汽车安全辅助系统,可以有效地帮助驾驶员在倒车时避免碰撞事故。
选择适合自己车辆的倒车雷达系统并正确安装和使用,将为您的驾驶带来更多的安全保障和便利。

摘要采用超声波测距原理,驾驶者在倒车时,将汽车的挡位推到R挡,启动倒车雷达,在控制器的控制下,由装置于车尾保险扛上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,从而计算出车体与障碍物之间的距离,判断出障碍物的位置,再由LED显示器和蜂鸣器声发出警示信号,从而使驾驶者倒车时不至于撞上障碍物。
整个过程,驾驶者无须回头便可知车后的情况,使停车和倒车更容易,更安全。
本文在查阅、分析国内外倒车雷达系统相关技术的基础上,结合最新研究成果,对基于超声波测距的倒车雷达预警系统的研制进行了深入探讨和研究。
该系统分为测距模块、系统控制模块和显示报警模块,并分别对其进行方案分析,构建了倒车雷达预警系统的系统构架和设计方案;在硬件电路中,详细阐述了运用单片机技术实现的可视倒车雷达预警系统的测距实现原理,分析了以AT89S52单片机为主控单元的系统硬件设计,并通过系统仿真研究,验证了系统的可靠性和可行性。
关键字:超声波;倒车雷达;传感器;AT89S52单片机ABSTRACTThe ultrasonic distance principle, drivers in reverse, the gears to push the car back and start against R radar, under the control of the controller, the device to carry on the rear insurance send ultrasonic probe, obstacle, sensor, echo signal after receiving echo signal controller, which calculated data processing, the distance between the body and the obstacles and obstacles, then LED by a warning signal and noise, thus make the drivers reverse not mask obstacles. The whole process, without turning and car drivers that after, parking and reverse easier, more safety.Based on the analysis of domestic consulting, reverse radar system on the basis of relevant technology, combining the latest research results of the based onultrasonic ranging back-draft radar warning system is discussed and studied. This system is divided into rangefinder module, the system control module and display alarming module, and carries on the analysis, to construct the backing of the early-warning radar system architecture and design scheme, In the hardware circuit, this paper expounds the application of visualization technology realization of location back-draft radar warning system, and analyzes the realization principle for the control unit of AT89S52 SCM system hardware and software design, and through the system simulation verified the feasibility and reliability of the system.Key words: ultrasonic sensors, radar, reversing AT89S52 SCM.目录1 绪论11.1倒车雷达防撞的意义11.2倒车雷达的发展过程21.3本文主要内容42 系统构建与方案设计52.1系统设计要求52.2系统构建52.3系统方案设计62.3.1测距系统方案设计62.3.2控制系统方案设计102.3.3显示报警系统方案设计112.3.4系统探测范围及传感器布点的确定112.4本章小结133 系统硬件设计143.1系统硬件设计思想143.2测距系统设计153.2.1超声波发射模块电路设计153.2.2超声波接收模块电路设计183.2.3测温电路设计213.3控制系统设计233.3.1 AT89S52单片机最小系统设计243.3.2串行通信接口设计253.3.3换向选通电路设计262.3.4电源模块电路设计273.3显示报警模块电路设计293.3.1显示模块电路设计293.3.2报警模块电路设计303.4本章小结313 仿真324.1系统模糊控制器设计334.2建立输出与输入变量的数学关系模型364.3 SIMULINK仿真及参数的调整384.4仿真效果分析394.5本章小结415 总结与展望42致谢43参考文献44附录461 绪论自2002年以来,家用轿车成为继购房之后的又一大消费热点。
汽车倒车防撞雷达系统设计摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。
该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。
在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。
关键词:倒车雷达超声波测距1 概述在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。
汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
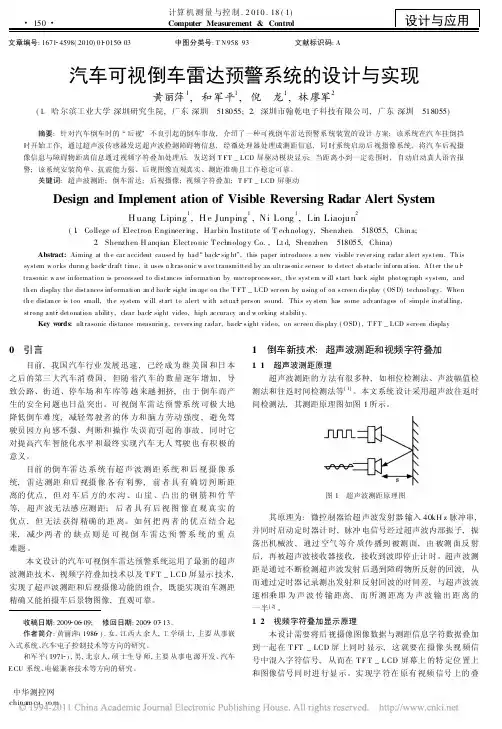
系统硬件原理图如图1.1:图1.1 倒车雷达报警系统框图该系统整体设计思路如下:警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。
ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。
超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。
温度采集模块不断测试环境温度,并将此信息传递给主控模块。
主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。
主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。
2 系统硬件电路设计系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。
汽车倒车雷达声光报警器设计汽车倒车雷达声光报警器设计摘要本设计从实验研究分析的角度,分析了汽车倒车雷达系统基本设计原理。
较详细介绍一种超声波测距系统以及根据该系统设计研制出的汽车倒车雷达声光报警器,提醒司机刹车。
设计采用超声波传感器,成本低廉,设计简单。
实际倒车时,利用超声波原理,由装置在车尾保险杠上的探头发送超声波撞击障碍物后反射此声波,利用单片机计算出车体与实际距离,然后,提示给司机,使停车或者倒车更容易,更安全。
因此,安装倒车雷达对安全驾驶有十分重要意义。
给驾驶员提供更轻便的驾驶感,减少一些不必要的交通问题。
因此个人认为有很好的实用价值和很大的上升空间。
目录一、绪论............................................................1.1、国内外发展概况以及存在的问题...................................1.2、设计目的.......................................................1.3、研究意义.......................................................1.4、设计要求.......................................................二、实验元件........................................................三、文献综述........................................................四、倒车雷达原理....................................................五、方案选择........................................................1、测距传感器选择:.................................................2、微处理器选择:...................................................3、语音报警器的选择:...............................................六、实验电路图......................................................1、超声波测距系统...................................................2、汽车倒车防撞测距报警系统.........................................3、声光报警电路图...................................................七、硬件设计和软件设计..............................................八、实验现象........................................................九、结论............................................................一、绪论1.1、国内外发展概况以及存在的问题随着社会经济发展交通运输业日益兴旺,汽车数量也在大幅度攀升。
基于单片机的倒车防撞预警系统设计倒车防撞预警系统是一种广泛应用于汽车上的辅助设备,可以帮助驾驶员在倒车过程中避免与障碍物发生碰撞。
本文将介绍一个基于单片机的倒车防撞预警系统的设计。
一、系统设计方案1.硬件设计部分:(1)超声波传感器:用于检测倒车车辆后方距离的变化,一般使用多个超声波传感器进行检测。
(2) 单片机(如Arduino):用于接收超声波传感器的信号并进行处理,同时控制显示器和蜂鸣器发出预警信号。
(3)显示器:用于显示倒车车辆后方的障碍物距离,可以使用LCD显示屏。
(4)蜂鸣器:用于发出声音预警信号,提醒驾驶员注意。
2.软件设计部分:(1)超声波传感器信号处理:单片机接收超声波传感器的信号,并进行滤波和幅值处理,得到障碍物距离值。
(2)倒车距离显示:将障碍物距离值显示在LCD屏幕上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(3)声音预警:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
二、系统实现步骤1.硬件实现:(1)连接超声波传感器:按照超声波传感器的规格书连接传感器与单片机。
(2)连接LCD显示屏:将LCD显示屏连接到单片机。
(3)连接蜂鸣器:将蜂鸣器连接到单片机。
2.软件实现:(1)单片机初始化:初始化单片机,设置IO口的输入输出模式和引脚功能。
(2)读取超声波传感器信号:通过IO口读取超声波传感器的信号,并进行幅值处理,得到障碍物距离值。
(3)显示距离信息:将障碍物距离值显示在LCD显示屏上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(4)发出声音预警信号:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
三、系统测试和优化1.测试:将倒车防撞预警系统连接到倒车车辆上,进行实际测试。
测试过程中要注意校准超声波传感器和LCD显示屏的正确读数,以及蜂鸣器声音的预警效果。
2.优化:根据实际测试结果优化系统设计,可考虑加入其他传感器,如摄像头等,提高系统的准确性和可靠性。
简单倒车雷达系统的设计倒车雷达是一种能够辅助车辆倒车时提供安全提示的装置。
它利用超声波技术感知车辆周围的障碍物,通过声波回波的延时来计算障碍物的距离,从而提醒驾驶员注意和避让。
下面我将介绍一个简单的倒车雷达系统设计。
首先,倒车雷达系统由四个传感器、控制器、声波发射器和显示器组成。
四个传感器被安装在车辆的后部,分别位于左后角、右后角和车辆的后方两个角落。
这样可以覆盖到车辆后方和两侧的障碍物,提供全方位的检测范围。
控制器是倒车雷达的核心部分,负责接收传感器发来的信息,并进行处理和分析。
它通过控制声波发射器发出超声波信号,然后接收传感器返回的回波信号。
控制器可以根据回波信号的延时计算出障碍物与车辆的距离,并根据不同的距离显示不同的警告信息。
声波发射器是用来发射超声波信号的装置。
它通常由一个或多个超声波传感器组成,可以在范围内发射超声波。
超声波在空气中传播,当遇到障碍物时会被反射回来,形成回波信号。
显示器是用来显示倒车雷达检测到的信息的设备,可以将距离信息和警告信息以直观的方式呈现给驾驶员。
显示器通常安装在车辆的仪表盘上或者倒车镜上方的中控台上,方便驾驶员观察。
简单的倒车雷达系统设计过程如下:首先,确定传感器的数量和安装位置。
根据车辆的尺寸和后方视野,确定需要安装四个传感器,分别位于左后角、右后角和车辆的后方两个角落。
然后,选取合适的超声波传感器作为声波发射器,并将其与控制器连接。
超声波传感器通常具有较小的体积和低功耗,可以方便地安装在车辆的后部。
接下来,编写控制器的程序逻辑。
控制器需要实时接收传感器发来的回波信号,并根据回波信号的延时计算出障碍物与车辆的距离。
然后,根据距离确定是否需要提醒驾驶员,并显示相应的警告信息。
最后,将显示器与控制器连接,并安装在合适的位置。
通过显示器可以直观地显示倒车雷达检测到的障碍物距离和警告信息。
在整个设计的过程中,还需要考虑传感器的灵敏度、控制器的计算能力、声波发射器的功率和显示器的显示效果等因素。
倒车雷达系统设计引言倒车雷达是一种汽车安全设备,通过使用超声波技术来检测并警示驾驶员物体的位置和距离。
倒车雷达系统可以有效地帮助驾驶员避免倒车时的碰撞事故,提高行驶的安全性。
本文将对倒车雷达系统的设计进行详细的介绍。
一、倒车雷达系统的原理1.超声波传感器超声波传感器是倒车雷达系统的核心部件。
它通过发射超声波波束,然后检测反射信号的方式来确定物体的距离。
超声波传感器通常安装在车辆的后保险杠上,并以一定的角度向后方发射超声波。
当超声波遇到障碍物时,会产生回波,通过检测回波的时间和强度,可以确定物体的距离和位置。
2.控制单元控制单元是倒车雷达系统的中枢。
它接收超声波传感器发出的信号,并进行信号处理和解析。
控制单元可以计算出物体的距离和位置,并将结果发送给警示装置。
3.警示装置警示装置是倒车雷达系统的输出装置,它通常是一个由多个LED灯组成的显示器。
根据物体的距离,警示装置会发出不同颜色或者声音的警报,提醒驾驶员注意。
二、倒车雷达系统的设计考虑因素在设计倒车雷达系统时,需要考虑以下几个因素:1.障碍物检测范围2.精度和准确性3.可靠性和稳定性4.警示装置的清晰度警示装置应具备清晰的显示效果,以便驾驶员能够清楚地看到距离和位置的变化。
因此,在选择警示装置时,需要考虑其亮度和视觉效果。
三、倒车雷达系统的工作流程1.超声波传感器发射超声波信号。
2.超声波信号遇到障碍物后产生回波。
3.控制单元接收回波信号,并通过计算回波的时间差和强度来确定障碍物的距离和位置。
4.控制单元将结果发送给警示装置。
5.警示装置根据接收到的结果显示相应的警报,提醒驾驶员注意。
四、倒车雷达系统的应用和发展倒车雷达系统已经广泛应用于汽车领域,成为汽车安全设备的重要组成部分。
随着车辆制造技术的不断进步,倒车雷达系统的性能和功能也得到了不断的提升。
目前,一些高端车型已经开始采用更先进的激光雷达技术来替代传统的超声波传感器,以提高倒车雷达系统的精度和灵敏度。
基于单片机的汽车倒车雷达系统设计毕业设计汽车倒车雷达系统设计是一项常见的毕业设计项目,本文将详细介绍基于单片机的汽车倒车雷达系统设计。
本设计将使用超声波传感器作为倒车雷达的感知器件,并通过单片机来实现信号的处理和显示。
首先,我们需要选择适合的超声波传感器。
超声波传感器是一种常用的非接触式测距传感器,能够准确测量所测物体与传感器之间的距离。
在汽车倒车雷达系统中,我们可以使用多个超声波传感器进行距离测量,以实现对周围环境的全方位感知。
接下来,我们需要选择合适的单片机作为主控制器。
单片机可以通过编程实现对传感器信号的处理和数据的显示。
常用的单片机有STC89C52、AT89C52等,其具有强大的计算和通信功能。
在硬件设计方面,我们需要按照电路图进行电路的连接。
具体而言,我们将超声波传感器连接到单片机的输入端口,以便获取距离数据。
同时,还可以将液晶显示屏和蜂鸣器等外设连接到单片机的输出端口,以实现对距离数据的实时显示和声音提示。
在软件设计方面,我们需要编写相应的程序代码。
主要包括以下几个功能:1.超声波传感器信号采集:通过单片机的输入端口采集超声波传感器的数据。
采集到的数据将通过AD转换进行数字化处理。
2.距离计算与处理:使用适当的算法来计算车辆与障碍物之间的距离。
在实际应用中,可以将距离划分为几个区域,并根据距离的远近发出相应的警告信号。
3.数据显示与提示:将计算得到的距离数据实时显示在液晶显示屏上,并通过蜂鸣器等输出设备来提醒驾驶员注意周围环境变化。
4.系统优化与稳定性:对系统进行调试和优化,确保系统能够正常运行并具有足够的稳定性。
最后,我们需要对设计的汽车倒车雷达系统进行实验验证。
通过在实际场景中进行测试,可以评估系统的性能,并根据测试结果进行调整和改进。
综上所述,基于单片机的汽车倒车雷达系统设计主要包括硬件设计和软件设计两个方面。
通过对超声波传感器信号的采集和处理,以及对距离数据的显示和提示,可以实现对车辆倒车过程中周围环境的全方位感知和安全驾驶的提醒。
自动化倒车雷达系统的设计与实现随着汽车产业的快速发展,倒车雷达系统作为一项重要的辅助驾驶技术,得到了广泛应用和普及。
本文将介绍自动化倒车雷达系统的设计与实现,并详细探讨其工作原理、关键技术以及未来发展趋势。
一、引言随着城市化进程的加速以及车辆保有量的快速增长,倒车事故的频发成为一个严重的社会问题。
倒车雷达系统作为一种有效的辅助设备,通过感知车辆周围环境的障碍物,提供准确的距离和方向信息,帮助驾驶员安全、高效地完成倒车操作。
二、工作原理1. 传感器系统自动化倒车雷达系统采用多种传感器来感知周围环境,常见的传感器包括超声波传感器、激光传感器以及摄像头等。
其中,超声波传感器是最常用的一种,可以通过测量超声波的反射时间来计算障碍物的距离。
2. 数据处理与算法传感器获取到的距离和方向信息将被送到控制单元进行处理。
控制单元通过特定的算法对传感器数据进行处理和分析,从而生成辅助驾驶的指令和反馈信息。
常见的算法包括距离计算、障碍物识别、碰撞预警等。
三、关键技术1. 数据融合与处理自动化倒车雷达系统中的传感器数据通常是多源异构的,如何对这些数据进行融合和处理是系统设计的关键。
数据融合算法可以将各种传感器的数据有效地结合起来,提高系统的准确性和可靠性。
2. 障碍物识别与警报倒车时容易出现诸如行人、其他车辆等障碍物,系统需要能够快速准确地识别这些障碍物,并及时向驾驶员发出警报。
障碍物识别算法的设计与实现是系统功能的核心之一。
3. 实时监测与响应自动化倒车雷达系统需要实时监测车辆周围环境的变化,并迅速响应驾驶员的操作指令。
系统的实时性和稳定性对于保障行车安全至关重要,需要利用高性能的硬件设备和优化的算法来实现。
四、实现效果与展望自动化倒车雷达系统已经在市场上得到广泛应用,并取得了显著的效果。
通过实时监测倒车过程中的障碍物,系统可以有效地帮助驾驶员避免倒车事故的发生。
未来,随着技术的不断发展,自动化倒车雷达系统将进一步提升准确性和可靠性,为驾驶员提供更全面的辅助服务。
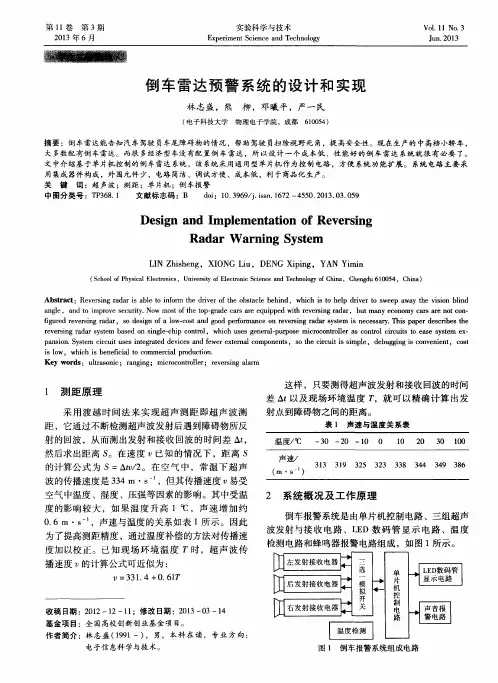
基于单片机的倒车防撞预警系统设计和实现韦穗林(广西水利电力职业技术学院 广西南宁 530023)摘 要:汽车倒车防撞预警系统是汽车泊车辅助装置。
系统由超声波发射与回波接收电路、超声波电信号放大电路、单片机控制电路、显示电路和声音报警电路组成,根据超声波测距原理,实现倒车防撞预警。
给出了硬件各单元电路图,软件主要模块的流程图,说明设计过程和工作原理。
采用通用型单片机作为控制电路,方便功能扩展,充分利用单片机的内部资源,外围元件少、电路简洁、成本低、实用性强。
关键词:倒车雷达;超声波测距;单片机;硬件电路;软件设计中图分类号:T P29 文献标识码:A 文章编号:1004-373X(2009)21-160-04Design and Realization of Car Reversing Ant-i Collision WarningS ystem Based on Single Chip C omputerW EI Suilin(Guangx i H ydraulic and Electric Po l y techni c Colleg e,Nanni ng,530023,Chi na)Abstract :Car r ev ersing ant-i collision w arning system is the car parking aux iliary unit.T he system is composed of ultr aso n -ic tr ansmitting and receiving circuit ,ultr aso nic electr ical signal enlar gement cir cuit,sing le chip co mputer contro l circuit,display circuit and so und a larm ing circuit.Accor ding to ultr aso nic r ang ing principle,car rev ersing ant-i collision war ning is realizedred,the har dw are v ario us units circuit diag ram ar e g iv en,as w ell as the softw are main module flo w char t.T he desig n process and pr inciple of w or k are analyzed in the paper.T he system t akes the general sing le chip co mputer as the co nt rol circuit,co nv enient functio n ex pansio n.Fully using sing le chip comput er c s internal resources,the per iphery part is few ,the circuit is simple,low pr ice and usable.Keywords :car r ev ersing radar;ultrasonic r ang ing;single chip computer;har dw are circuit;soft war e desig n收稿日期:2009-04-240 引 言汽车倒车防撞预警系统即是俗称的倒车雷达,是汽车泊车辅助装置。
毕业论文﹙设计﹚题目汽车倒车雷达预警系统的设计及实现学生姓名王阳学号********** 所在学院物理与电信工程学院专业班级通信1204班指导教师张文丽完成地点陕西理工学院2016年6月5日毕业论文﹙设计﹚任务书院(系) 物理与电信工程学院专业班级通信1204 学生姓名王阳一、毕业论文﹙设计﹚题目汽车倒车雷达预警系统的设计及实现二、毕业论文﹙设计﹚工作自__2015 __年__ 12 _月__ 日起至_ 2016__年 6 月日止三、毕业论文﹙设计﹚进行地点: 物电学院实验室四、毕业论文﹙设计﹚的内容要求:1、本次毕业设计要求如下:设计一个汽车倒车雷达预警系统,要求:⑴该系统可实现汽车倒车时车尾保险杠和障碍物之间的测距,并能够实时显示;⑵系统可预设测距报警的下限值,当实际测距小于预设值时,系统应报警提示,同时可实现对预设值的调整和修改;⑶报警方式要求有两种以上,以更好地提示驾驶员车辆周边的情况,从而提高汽车倒车的安全性。
2、毕业设计成果要求:程序代码、硬件实物和论文,论文要求计算机打印(A4纸),论文有不少于3000词的相关英文中文翻译。
3、毕业设计时间安排:1—4周:查阅相关资料,熟悉题目内容,掌握设计原理,提交开题报告;5—10周:根据设计原理,进行相应软、硬件设计;11—12周:完善设计功能,整理资料并进行结果测试及分析;13—14周:毕业设计验收;15—16周:撰写、修改、提交毕业论文,毕业答辩。
指导教师系(教研室)系(教研室)主任签名批准日期接受论文 (设计)任务开始执行日期学生签名汽车倒车雷达预警系统的设计及实现王阳(陕西理工学院物理与电信工程学院通信工程专业1204班,陕西汉中 723001)指导教师:张文丽[摘要]汽车倒车雷达预警系统能在汽车倒车时为驾驶员提供周围障碍物信息,可降低倒车难度,避免驾驶员因方向感不强、判断和操作失误而引起的事故。
本课题设计了一个汽车倒车雷达预警系统,倒车时,驾驶者启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇障碍物产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出语音警示信号,以提示驾驶员车辆周边的情况,从而提高汽车倒车的安全性。
设计结果表明,该系统操作简单,测距精度高,安全性能好,具有很强的实用价值。
[关键词] 超声波;单片机;测距;传感器;报警Design And Implementation Of Automobile Reversing RadarWarning SystemWang Yang(Grade12,Class 4,Major of Communication Engineering,School of Physics and Telecommunication Engineering of Shaanxi University of Technology, Hanzhong 723001,China)Tutor:Zhang WenliAbstract: Automobile reversing radar warning system can provide the information of the obstacle surroundings when reversing, which can reduce the difficulty of reversing and avoid the accident caused by the sense of direction, the judgment and the operation of the driver. A car reversing radar warning system is designed in this paper.The driver start reversing radar when reversing,then the probe in the rear bumper transmits ultrasonic waves.The sensor can received echo signal from obstacles.After processing by processor,the screen can display the distance between the probe and obstacle.When the distance is greater than the safety distance,the system can alarm and prompt the driver to pay attention when reversing.The system has the advantages of simple operation,high precision of ranging, and good safety performance,which has the good practical value in application.Key words: ultrasonic,Single chip microcomputer,rang, transducer,give an alarm目录引言 (1)1.课题研究背景 (2)1.1研究现状 (2)1.2发展前景 (2)1.3应用领域 (3)1.4本文研究内容 (3)2.方案论证 (4)2.1设计要求 (4)2.2方案设计 (4)2.3方案选择 (5)3.硬件设计 (6)3.1系统组成 (6)3.2单元电路设计 (6)3.2.1单片机控制电路 (6)3.2.2系统复位电路设计 (7)3.2.3晶振电路 (8)3.2.4 LCD显示电路 (9)3.2.5报警电路设计方案 (9)3.2.6按键设置电路 (10)3.2.7 HC-RS04超声波测距模块 (11)3.2.8语音IC模块 (12)4. 软件设计 (13)4.1系统对软件的要求 (13)4.2主程序 (13)4.3显示数据子程序 (13)4.4报警子程序 (14)4.5按键子程序 (14)5.系统调试及分析 (15)5.1软件仿真 (15)5.1.1 Proteus简介 (15)5.1.2 系统仿真 (15)5.2硬件调试 (16)5.2.1元器件的焊接 (16)5.2.2电路调试与分析 (16)5.3结果分析 (16)结束语 (18)致谢 (19)参考文献 (20)附录A:外文文献原文 (21)附录B:外文文献译文 (32)附录C:部分程序清单 (43)附录D:元器件清单 (53)附录E:实物图 (54)引言汽车业与电子业是世界工业的两大金字塔,随着汽车工业与电子工业的不断发展,在现代汽车上,电子技术的应用越来越来广泛,汽车电子化的程度越来越高。
电子技术的引入使汽车在安全安全、舒适和方便等方面有了很大的提升。
应用的电子技术主要有:电子控制安全气囊,智能记录仪,雷达式距离报警器,中央控制门锁,自动空调,自动车窗、车门、座椅、刮水器,车灯控制,电源控制以及充电器等。
近年来汽车的自动调速系统,主动式汽车防撞系统,汽车监测和自诊断系统以及汽车导航系统也得到了广泛的应用。
在过去20~30年中,人们主要把精力集中于汽车的被动安全性方面,例如,在汽车的前部或后部安装保险杠、在汽车外壳四周安装某种弹性材料、在车内相关部位安装各种形式的安全带及安全气囊等等,以减轻汽车碰撞带来的危害。
安装防撞保险杠固然能在某种程度上减轻碰撞给本车造成损坏,却无法消除对被撞物体的伤害;此外,车上安装的安全气囊系统,在发生车祸时不一定能有效地保护车内乘务员的安全。
所有这些被动安全措施都不能从根本上解决汽车在行驶中发生碰撞造成的问题。
如果从预防撞车事故的发生的角度着眼,在提高汽车主动安全性方面下功夫,则可在汽车安全性领域有较大的突破。
如今,拥有私家轿车的人越来越多,带来的交通问题也日益严重。
其中安全倒车是驾车技术水平不高或没有安全意识的开车人士最为担心的交通问题之一,如果稍不留神不仅会给自己或别人带来财产损失,还会造成激烈的争吵与纠纷,甚至也威胁到了驾驶员的生命安全。
面对这样的情况与问题,倒车防撞报警器就被人们设计出来,依据声源或以直观的显示提醒驾驶员周围障碍物的分布情况,解决了驾驶员倒车和启动轿车时前后左右探视所引起的问题,并帮助驾驶员扫除了视觉死角和视野模糊的不足,提高了倒车安全性。
现代社会的汽车工业飞速发展,拥有私家轿车的人越来越多,带来的交通问题也日益严重。
其中安全倒车是驾车技术水平不高或没有安全意识的开车人士最为担心的交通问题之一,如果稍不留神不仅会给自己或别人带来财产损失,还会造成激烈的争吵与纠纷,甚至也威胁到了驾驶员的生命安全。
面对以上种种情况与问题,倒车防撞报警器的重要性越来越强,依据声源或以直观的显示提醒驾驶员周围障碍物的分布情况,解决了驾驶员倒车和启动轿车时前后左右探视所引起的问题,并帮助驾驶员扫除了视觉死角和视野模糊的不足,提高了倒车安全性。
1.课题研究背景随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有自己的汽车。
在享受汽车给我们带来的便利同时,由于倒车而产生的问题也日益突出。
一方面汽车的数量逐年增加,公路、街道、停车场和车库拥挤不堪,可转动的空间越來越少。
另一方面,新司机及非专职司机越來越多,因倒车引起的纠纷越来越多,车辆之间、车辆与人、车辆与墙壁等障碍物之间的碰掩时有发生。
现如今解决汽车的倒车难问题目前有两种思路,一是寄希望于汽车自动驾驶技术及其配套设施的日益成熟,目前这项技术仍处于研制幵发阶段,短期内尚未能推广应用;二是传统倒车系统,但其功能简单,驾驶员仍然需要通过后视镜去判断乍后的物体,以及通过估计汽车和车后障碍物的距离完成倒车任务。
本文研究的汽车倒车预替系统属于第二种思路,它在常见的汽车倒乍颅聱装置的基础上进行改进,能很大程度地解决倒车难题。
1.1 研究现状国外汽车倒车雷达预警系统早期大多采用红外线的发射与接收原理,不属于雷达(无线电波)的产品,最大的缺点是红外线波易受干扰,整个系统的警示音常呈现不稳定的乱鸣状态,另外对深黑色粗糙表面物体的反应也较差。
但更糟糕的是,无论是红外线发射器或接收器,只要任何一方让一层薄薄的冰雪或泥尘覆盖,系统就会失效。
欧美有一种电磁感应倒车雷达。
在一线路套上一环型的感应圈,以感应车后物体的有无。
此种装置价格中等,并且完全隐密,但可惜的是,安装困难,而且只能探测动态物品,当车在后退行进时,可探测到物体,但车一旦停止后退行进,则任何物体都不被认可。