控制理论与Matlab数学模型
- 格式:ppt
- 大小:494.00 KB
- 文档页数:61
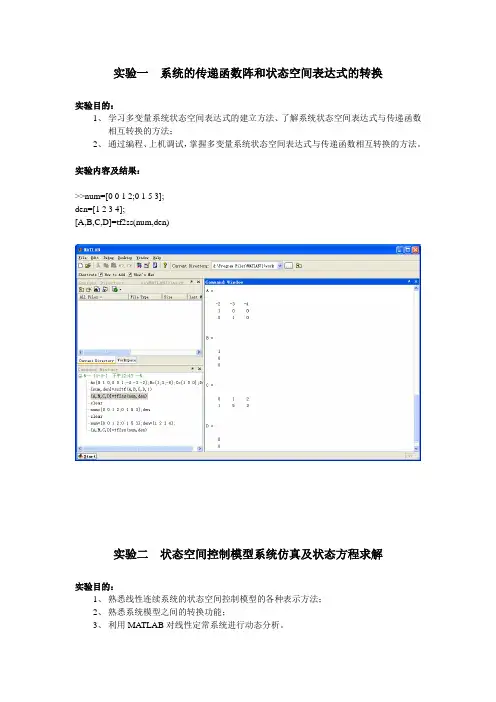
实验一系统的传递函数阵和状态空间表达式的转换实验目的:1、学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换的方法。
实验内容及结果:>>num=[0 0 1 2;0 1 5 3];den=[1 2 3 4];[A,B,C,D]=tf2ss(num,den)实验二状态空间控制模型系统仿真及状态方程求解实验目的:1、熟悉线性连续系统的状态空间控制模型的各种表示方法;2、熟悉系统模型之间的转换功能;3、利用MATLAB对线性定常系统进行动态分析。
实验内容及结果(1)>>num=[1 2 1 3]; den=[1 0.5 2 1];sys=tf(num,den);sys1=tf2zp(num,den); sys2=tf2ss(num,den); impulse(sys);step(num,den,t);>>A=[0 1;-10 -5];B=[0;0];D=B;C=[1 0;0 1];x0=[2;1];[y,x,t]=initial(A,B,C,D,x0);plot(t,x(:,1),t,x(:,2))gridtitle('Response to initial condition') xlabel('Time(sec)')ylabel('x1,x2')text(0.55,1.15,'x1')text(0.4,-2.9,'x2')>>A=[-1 -1;6.5 0]; B=[1 1;1 0];C=[1 0;0 1];D=[0 0;0 0];step(A,B,C,D)(4)思考>>A=[0 -2;1 -3];B=[2;0];C=[1 0];x0=[1;1];U=1;[t,x]=ode45(@solve_state_fun,[0 10],x0,[],A,B,U); plot(t,x(:,1),t,x(:,2));gridtitle('Response to initial condition')xlabel('Time(sec)')ylabel('x1,x2')text(0.55,1.15,'x1')text(0.4,-2.9,'x2')实验三系统能控性、能观性的判别实验目的:1、系统的能控性和能观测性的判别方法、系统的能控性和能观测性的分解;2、了解MATLAB中的相应的函数。
控制理论实验报告MATLAB仿真实验实验报告课程名称:控制理论(二)讲师:林峰结果:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _实验名称:MATLAB仿真实验类型:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _同一组学生的姓名:________一、实验的目的和要求(要求)二.实验内容和原则(要求)三.主要仪器和设备(必需)四.操作方法和实验步骤五、实验数据的记录和处理六.实验结果和分析(必需)7.控制系统时域分析实验9的探讨与体会首先,实验的目的:1.利用计算机辅助分析,掌握系统的时域分析方法。
2.熟悉Simulink仿真环境。
二、实验原理和方法:系统仿真本质上是系统模型的求解。
对于控制系统,一般模型可以转化为微分方程或差分方程。
因此,在仿真过程中,通过一些数值算法从初始状态开始逐步计算系统响应。
最后,画出系统的响应曲线,分析系统性能。
控制系统最常用的时域分析方法是当输入信号为单位阶跃和单位脉冲函数时,获得系统的输出响应,分别称为单位阶跃响应和单位脉冲响应。
在MATLAB中,提供了单位阶跃响应函数step、单位冲激响应函数impulse、零输入响应函数initial等来获得连续系统。
二、实验内容:二阶系统的状态方程模型是——控制理论(二)指导者:林峰结果:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _实验名称:MATLAB仿真实验类型:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _同一组学生的姓名:________一、实验的目的和要求(要求)二.实验内容和原则(要求)三.主要仪器和设备(必需)四.操作方法和实验步骤五、实验数据的记录和处理六.实验结果和分析(必需)7.控制系统时域分析实验9的探讨与体会首先,实验的目的:1.利用计算机辅助分析,掌握系统的时域分析方法。
2.熟悉Simulink仿真环境。
现代控制理论基于MATLAB的实验指导书第一部分实验要求1.实验前做好预习。
2.严格按照要求操作实验仪器,用毕恢复原状。
3.实验完成后,由指导教师检查实验记录、验收仪器后,方可离开。
4.实验报告应包括以下内容:1)实验目的;2)实验原理图;3)实验内容、步骤;4)仿真实验结果(保留仿真实验波形,读取关键参数);5)仿真实验结果分析。
第二部分MATLAB平台介绍实际生产过程中,大部分的系统是比较复杂的,并且要考虑安全性、经济性以及进行实验研究的可能性等,这在现场实验中往往不易做到,甚至根本不允许这样做。
这时,就需要把实际系统建立成物理模型或数学模型进行研究,然后把对模型实验研究的结果应用到实际系统中去,这种方法就叫做模拟仿真研究,简称仿真。
到目前为止,已形成了许多各具特色的仿真语言。
其中美国Mathworks软件公司的动态仿真集成软件Simulink与该公司著名的MATLAB软件集成在一起,成为当今最具影响力的控制系统应用软件。
国内MA TLAB软件的著名论坛为“MATLAB中文论坛”,网址为:https:///forum.php,建议同学们注册并参与论坛相关内容的讨论。
图1 MA TLAB仿真环境第三部分 实验实验一线性系统的时域分析实验目的熟悉MATLAB 环境,掌握用MATLAB 控制系统工具箱进行线性定常系统的时域分析、能控性与能观性分析、稳定性分析的方法。
实验要求完成指导书规定的实验内容,记录并分析实验结果,写出实验报告。
实验内容1.已知系统的状态模型,求系统在单位阶跃输入下的各状态变量、输出响应曲线。
例:[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡2121214493.69691.1,0107814.07814.05572.0x x y u x x x x 。
键入:a = [-0.5572, -0.7814; 0.7814,0]; b = [1; 0]; c = [1.9691,6.4493]; d = 0;[y, x, t]=step(a, b, c, d); plot(t, y); grid (回车,显示输出响应曲线。

现代控制理论的MATLAB实现现代控制理论是控制工程中一门重要的学科,它研究如何设计和分析控制系统以满足一定的性能指标。
MATLAB是一种功能强大的科学计算和工程仿真软件,广泛应用于控制系统设计与分析。
本文将介绍现代控制理论的一些常见方法在MATLAB中的实现。
1.线性系统的状态空间表示线性系统的状态空间表示是现代控制理论的核心内容之一、在MATLAB中,可以使用`ss`命令创建线性系统的状态空间模型。
例如,假设存在一个二阶线性时不变系统,其传递函数为:可以使用以下代码将其转换为状态空间模型:```matlabnum = [1];den = [1, 1, 1];sys = tf(num, den);ss_sys = ss(sys);```2.线性系统的传递函数表示传递函数是描述线性系统输入输出关系的一种常用表示方法。
在MATLAB中,可以使用`tf`命令创建线性系统的传递函数模型。
例如,假设存在一个二阶线性时不变系统,其状态空间描述为:```matlabA=[0,1;-1,-1];B=[0;1];C=[1,0];D=0;ss_sys = ss(A, B, C, D);```可以使用以下代码将其转换为传递函数模型:```matlabtf_sys = tf(ss_sys);```3.常见控制器的设计与分析现代控制理论中常用的控制器设计方法包括PID控制器、根轨迹法、频率域分析等。
在MATLAB中,可以使用`pid`命令创建PID控制器,并使用`rlocus`命令绘制根轨迹图。
例如,创建一个PID控制器:```matlabKp=1;Kd=0.1;pid_controller = pid(Kp, Ki, Kd);```绘制根轨迹图:```matlabsys = tf([1], [1, 1, 1]);rlocus(sys);```4.系统的频率响应分析频率响应分析是现代控制理论中常用的系统性能评估方法之一、在MATLAB中,可以使用`bode`命令绘制系统的频率响应曲线。
控制工程实训课程学习总结基于MATLAB 的系统建模与仿真实验报告摘要:本报告以控制工程实训课程学习为背景,基于MATLAB软件进行系统建模与仿真实验。
通过对实验过程的总结,详细阐述了系统建模与仿真的步骤及关键技巧,并结合实际案例进行了实验验证。
本次实训课程的学习使我深入理解了控制工程的基础理论,并掌握了利用MATLAB进行系统建模与仿真的方法。
1. 引言控制工程是一门应用广泛的学科,具有重要的理论和实践意义。
在控制工程实训课程中,学生通过实验来加深对控制系统的理解,并运用所学知识进行系统建模与仿真。
本次实训课程主要基于MATLAB软件进行,本文将对实验过程进行总结与报告。
2. 系统建模与仿真步骤2.1 确定系统模型在进行系统建模与仿真实验之前,首先需要确定系统的数学模型。
根据实际问题,可以选择线性或非线性模型,并利用控制理论进行建模。
在这个步骤中,需要深入理解系统的特性与工作原理,并将其用数学方程表示出来。
2.2 参数识别与估计参数识别与估计是系统建模的关键,它的准确性直接影响到后续仿真结果的可靠性。
通过实际实验数据,利用系统辨识方法对系统的未知参数进行估计。
在MATLAB中,可以使用系统辨识工具包来进行参数辨识。
2.3 选择仿真方法系统建模与仿真中,需要选择合适的仿真方法。
在部分情况下,可以使用传统的数值积分方法进行仿真;而在其他复杂的系统中,可以采用基于物理原理的仿真方法,如基于有限元法或多体动力学仿真等。
2.4 仿真结果分析仿真结果的分析能够直观地反映系统的动态响应特性。
在仿真过程中,需对系统的稳态误差、动态响应、鲁棒性等进行综合分析与评价。
通过与理论期望值的比较,可以对系统的性能进行评估,并进行进一步的优化设计。
3. 实验案例及仿真验证以PID控制器为例,说明系统建模与仿真的步骤。
首先,根据PID控制器的原理以及被控对象的特性,建立数学模型。
然后,通过实际实验数据对PID参数进行辨识和估计。
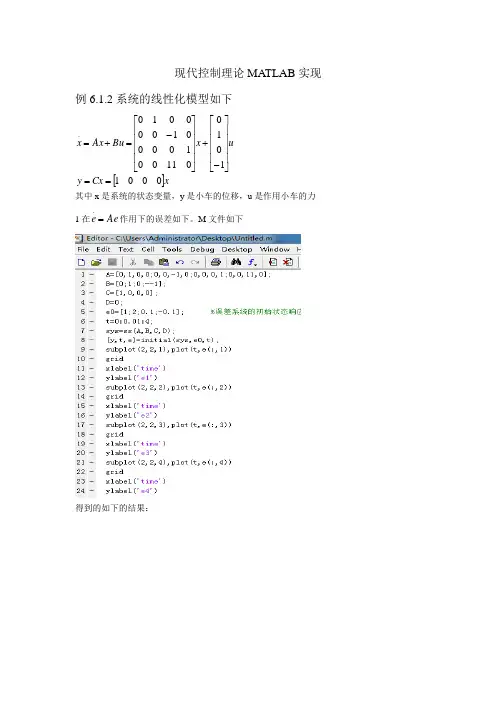
现代控制理论MATLAB 实现例6.1.2系统的线性化模型如下[]xCx y ux Bu Ax x 0001101001100100001000010.==⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=+=其中x 是系统的状态变量,y 是小车的位移,u 是作用小车的力 1在Ae e =.作用下的误差如下。
M 文件如下得到的如下的结果:设计一个状态观测器,使得观测器极点是10,10,322,3224321-=-=+-=+-=u u j u j u解 观测器模型如下Ly Bu x LC A x++-=~.)(~运行如下m 文件状态估计的误差状态方程为:e LC A e )(.-=以下进一步通过仿真来检验观测器的效果,取初始误差向量为[]Te 1.01.021)0(-=执行如下m 文件状态估计的误差曲线如下降维观测器的题:例6,3,2考虑系统Cxy Bu Ax x =+=.其中,[]001,100,6116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=C B A 设计一个具有极点u1=-10,u2=-10,的降维的观测器。
因此降阶观测器的增益矩阵是L=[]T514,具有期望极点的降阶观测器为u y w w ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡---=10260191616114~.~跟踪控制器的设计例5.4.1已知被控对象的状态空间模型为[]xy u x x 21104310.=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= 设计状态反馈控制器,使得闭环极点为-4和-5,和跟踪控制器。
并讨论闭环系统的稳态性能。
可以知道能稳定跟踪先判断是否能稳定跟踪可以得到如下的结果00.511.522.530.20.40.60.811.21.4time(sec)O u t p u t最优控制的习题例7.2.2考虑以下状态空间模型的描述的系统:其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100,92735100010B A系统的性能指标J 定义为 ⎰∞+=)(t T T d Ru u Qx x J其中,[]1,100010001=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=R Q 设计最优状态反馈控制器,并检验最优闭环系统对初始状态[]Tx 001)0(=的响应。
MATLAB环境下的模型预测控制理论的应用丛爽邓娟(中国科学技术大学自动化系,合肥230027)E-mail:scong@ustc.edu.cn摘要从模型预测控制的原理出发。
介绍利用MA7ⅡAB模型预测控制工具箱进行模型预测控制器设计的全过程。
就被控对象的不同模型。
以及备类模型形式之间的转换做了具体的系统的阐述。
在控刺器的设计过程中,给出不同情况下的控制器的设计方法,并且对控制器设计申的参数选择对系统控制性能的影响进行了分析与总结。
最后通过数值实例说明了如何进行了模型预测控制器的设计。
关键词模型预测控制模型辨识阶跃响应模型系统仿真文章编号l002—8331一(2005)16-0196—03文献标识码A中圈分类号TPl3ModelPredictiveControlTheoryandApplicationunderMATLABEnvironment(Dept.ofAutomation,UniversityofScience&TechnologyofChina,Hefei230027)Abstract:Basedtheprincipleofmodelpredictivecontrol,thepaperintroducesthewholeprocessofmodelpredic—fivecontrollerdesignwithmodelpredictivecontroltoolboxinMATLAB.Systematicallyrepresentthedifferentmodelsofcontrolledplant,aswellastheconversionsofthosemodels.Intheprocedureofthecontrollerdesign,differentcontrollerdesignmethodsintroduced.Atthe8alTletime,theanalysesandconclusionofeffectstosystemcontrolperformanceintheaspectofparametersselection啪done.Atlast.annumericalexampleofthemodelpredictivecontrollerdesignisgiven.Keywords:modelpredictivecontrol,modelidentification,stepresponsemodel,systemsimulation1引言以状态空间法为基础的现代控制理论从20世纪60年代提出到70年代在理论上日趋完善,并且在许多方面得到了成功的运用。
现代控制理论习题解答与Matlab程序⽰例现代控制理论习题解答与Matlab程序⽰例现代控制理论第三版课后习题参考解答:下⾯给出部分书后习题的Matlab⽅法求解:第⼀章状态空间表达式1 传递函数转为状态空间表达式和约旦标准型num=[10,-10];den=[1,4,3,0];w=tf(num,den);se=ss(w)[T,J]=jordan(A)对应习题1-62 状态空间表达式转为传递函数A=[0,1,0;-2,-3,0;-1,1,-3];B=[0;1;2];C=[0,0,1];D=0;se=ss(A,B,C,D);w=tf(se)对应习题1-7第⼆章状态空间表达式的解A=[0,1;0,0];B=[0;1];C=[1,0];D=0;se=ss(A,B,C,D);[y,t,x]=step(se);figure(1);plot(t,x);figure(2);plot(t,y);对应习题2-6第三章能控性和能观性1 能控性和能观性判定A=[-3,1;1,-3];B=[1,1;1,1];C=[1,1;1,-1];M=[B,A*B];N=[C;C*A];n=length(A);rank(M)if rank(M)==ndisp('系统可控')elsedisp('系统不可控')endrank(N)if rank(N)==ndisp('系统可观')elsedisp('系统不可观')end[T,J]=jordan(A);T'*BC*T2 能控标准型A=[1 -2;3 4];B=[1;1];C=[0 0];D=0;G=ss(A,B,C,D);M=[B,A*B];n=length(A);rank(M)if rank(M)==ndisp('系统可控')elsedisp('系统不可控')endQc=ctrb(A,B);Cm=[0 1]*inv(Qc);Cm2=inv([Cm;Cm*A]);sysc=ss2ss(G,inv(Cm2))对应习题3-73 能观标准型A=[1,-1;1,1];B=[2;1];C=[-1 1];D=0;G=ss(A,B,C,D);M=[B,A*B];N=[C;C*A];n=length(A);rank(M)if rank(M)==ndisp('系统可控')elsedisp('系统不可控')endrank(N)if rank(N)==ndisp('系统可观')elsedisp('系统不可观')endQc=ctrb(A,B);Cm=[0 1]*inv(Qc);Cm2=inv([Cm;Cm*A]);sysc=ss2ss(G,inv(Cm2))Qo=obsv(A,C);Om=inv(Qo)*[0;1];Om2=[Om A*Om];syso=ss2ss(G,inv(Om2))对应习题3-84 传递函数转能控或能观标准型num=[1,6,8];den=[1,4,3];[A,B,C,D]=tf2ss(num,den);G=ss(A,B,C,D);M=[B,A*B];N=[C;C*A];n=length(A);rank(M)if rank(M)==ndisp('系统可控')elsedisp('系统不可控')endrank(N)if rank(N)==ndisp('系统可观')elsedisp('系统不可观')endCm=[0 1]*inv(Qc);Cm2=inv([Cm;Cm*A]);sysc=ss2ss(G,inv(Cm2))Qo=obsv(A,C);Om=inv(Qo)*[0;1];Om2=[Om A*Om];syso=ss2ss(G,inv(Om2))对应习题3-9第四章李雅普诺夫⽅法和稳定性1 李雅普诺夫定理第⼀⽅法A=[-3 -6 -2 -1;1 0 0 0;0 1 0 0;0 0 1 0]; B=[1;0;0;0];C=[0 0 1 1];D=[0];flag=0;[z,p,k]=ss2zp(A,B,C,D,1);disp('系统零点,极点和增益为:');zpkn=length(A);for i=1:nif real(p(i))>0flag=1;endendif flag==1disp('系统不稳定');elsedisp('系统稳定');end通过极点判定系统是否稳定2 李雅普诺夫定理第⼆⽅法A=[-3 -6 -2 -1;1 0 0 0;0 1 0 0;0 0 1 0]; Q=eye(4,4);P=lyap(A,Q);flag=0;n=length(A);for i=1:ndet(P(1:i,1:i))if(det(P(1:i,1:i))<=0)flag=1;endendif flag==1disp('系统不稳定');elsedisp('系统稳定');end通过P是否正定判定系统是否稳定。
现代控制理论及其MATLAB实践课程设计一、前言现代控制理论是电子信息类学科中的重要基础课程,本门课程主要介绍现代控制理论的内容以及如何运用MATLAB进行实际计算和仿真实践。
这门课程的目的在于掌握现代控制理论基础知识,熟悉控制系统的数学模型,能够使用MATLAB实现控制策略和算法,以及评价系统的性能,为学生今后的工程实践打下坚实基础。
二、课程大纲1. 控制系统基础知识•控制系统的基本概念和分类•系统建模的方法与技巧•信号与系统的基本原理•控制系统的基本结构2. 线性系统理论•系统传递函数及其性质•系统稳定性分析•系统稳定性判据•实际系统的频率响应分析3. 分布式控制系统•分布式控制系统的基本概念•分布式控制系统的信号传递与通信•分布式控制系统的分析与设计•广域网络上的分布式协同控制4. MATLAB模拟与实践•MATLAB基本操作和编程技巧•线性系统建模及仿真•控制策略和算法设计•控制系统的性能评价和优化三、课程设计本门课程的设计旨在提高学生的实际操作能力和创新思维能力,具体安排如下:1. 实验教学环节本课程将采用小班教学,分为理论课和实验课两个环节。
实验教学环节有以下几方面内容:•实验一:MATLAB基础操作练习•实验二:建立线性系统的模型及其控制•实验三:分布式控制系统设计和实现•实验四:MATLAB仿真结果分析及评价2. 课程设计要求每个小组的组长需要编写一个小组实验报告,其中要求包括以下内容:•实验目的、原理和方案•实验步骤详解和MATLAB代码实现•实验数据处理和仿真结果分析•实验心得与体会在每个实验课后,小组同学之间需要进行合作协作,并在组长指导下共同完成实验报告的撰写和提交。
四、总结通过本门课程的学习和实践,学生能够深入理解现代控制理论的基本原理及其应用,在MATLAB仿真环境下逐步掌握系统建模、控制策略设计和控制系统性能评价等关键步骤。
同时,本课程的课程设计能够培养学生的实际操作能力和创新思维能力,为他们今后的工程实践打下坚实基础。