第六章 轮系
- 格式:ppt
- 大小:6.56 MB
- 文档页数:48
第六章轮系§6-1 轮系及其分类轮系是由一系列齿轮所组成的传动装置。
定义:这种由一系列齿轮组成的传动系统称为轮系。
它通常介于原动机和执行机构之间,把原动机的运动和动力传给执行机构。
工程实际中常用其实现变速、换向和大功率传动等,具有非常广泛的应用。
轮系的类型定轴轮系周转轮系混合轮系1、定轴轮系定义:组成轮系的所有齿轮几何轴线的位置在运转过程中均固定不变的轮系,称为定轴轮系,又称为普通轮系。
2、周转轮系定义:组成轮系的齿轮中至少有一个齿轮几何轴线的位置不固定,而是绕着其它定轴齿轮轴线回转的轮系,称为周转轮系。
周转轮系组成:2—行星轮1、3—中心轮H—系杆或行星架轮1与轮3轴线重合周转轮系的分类1. 根据周转轮系所具有的自由度数目不同(1)行星轮系周转轮系中,若将中心轮3(或1)固定,则整个轮系的自由度为1。
这种自由度为1的周转轮系称为行星轮系。
为了确定该轮系的运动,只需要给定轮系中一个构件以独立的运动规律即可。
(2)差动轮系周转轮系中,若中心轮1和3均不固定,则整个轮系的自由度为2。
这种自由度为2的周转轮系称为差动轮系。
为了使其具有确定的运动,需要两个原动件。
2. 根据周转轮系中基本构件的不同(1)2K-H型周转轮系单排式双排式双排式(2)3K型周转轮系具有三个中心轮的周转轮系一个周转轮系由行星轮、系杆和中心轮等几部分组成,其中,中心轮和系杆的运转轴线重合。
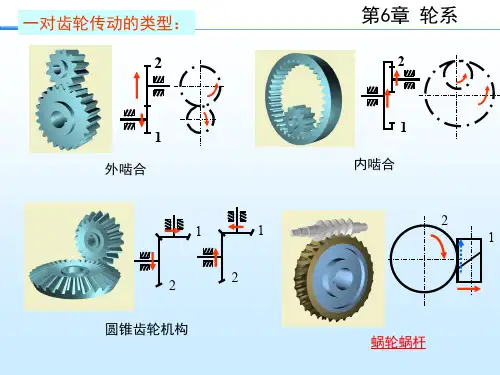
§6-2 定轴轮系的传动比1、传动比定义轮系中输入轴的角速度(或转速)与输出轴的角速度(或转速)之比,即:2、一对齿轮的传动比122112z z i ±==ωω正号:表示转向相同,用于内啮合负号:表示转向相反,用于外啮合3、传动比大小的计算举例说明传动比计算●主、从动轮转向关系的确定1、首末两轴平行,用“+”、“-”表示。
4——惰轮不改变传动比的大小,但改变轮系的转向2、首末两轴不平行用箭头表示所有主动轮齿数的乘积所有从动轮齿数的乘积定轴轮系传动比3、所有轴线都平行所有主动轮齿数的乘积所有从动轮齿数的乘积m i )1(51-==ωωm ——外啮合的次数4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴线互相平行仍可在传动比的计算结果中加上"+"、"-"号来表示主、从动轮的转向关系。

第6章轮系本章主要介绍轮系的分类和应用,轮系传动比的计算方法。
由单对齿轮组成的齿轮机构功能单一,不能满足工程上的复杂要求,故常采用若干对齿轮,组成轮系来完成传动要求。
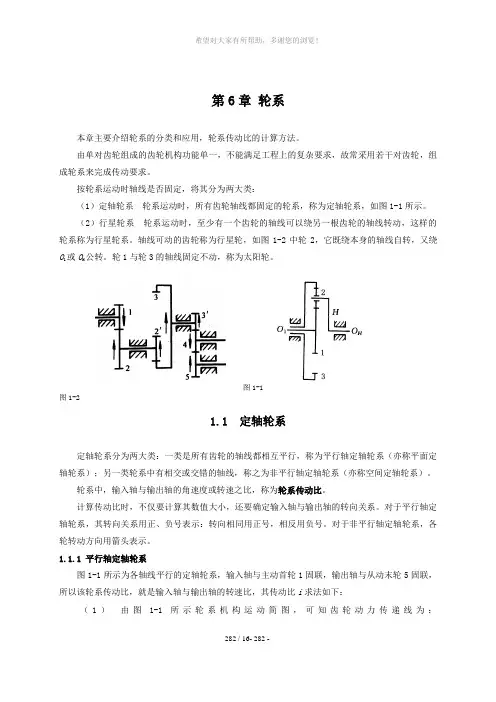
按轮系运动时轴线是否固定,将其分为两大类:(1)定轴轮系轮系运动时,所有齿轮轴线都固定的轮系,称为定轴轮系,如图1-1所示。
(2)行星轮系轮系运动时,至少有一个齿轮的轴线可以绕另一根齿轮的轴线转动,这样的轮系称为行星轮系。
轴线可动的齿轮称为行星轮,如图1-2中轮2,它既绕本身的轴线自转,又绕O1或O H公转。
轮1与轮3的轴线固定不动,称为太阳轮。
图1-1图1-21.1 定轴轮系定轴轮系分为两大类:一类是所有齿轮的轴线都相互平行,称为平行轴定轴轮系(亦称平面定轴轮系);另一类轮系中有相交或交错的轴线,称之为非平行轴定轴轮系(亦称空间定轴轮系)。
轮系中,输入轴与输出轴的角速度或转速之比,称为轮系传动比。
计算传动比时,不仅要计算其数值大小,还要确定输入轴与输出轴的转向关系。
对于平行轴定轴轮系,其转向关系用正、负号表示:转向相同用正号,相反用负号。
对于非平行轴定轴轮系,各轮转动方向用箭头表示。
1.1.1 平行轴定轴轮系图1-1所示为各轴线平行的定轴轮系,输入轴与主动首轮1固联,输出轴与从动末轮5固联,所以该轮系传动比,就是输入轴与输出轴的转速比,其传动比i求法如下:(1)由图1-1所示轮系机构运动简图,可知齿轮动力传递线为:(1—2)=(2′—3)=(3′—4)=(4—5)上式括号内是一对啮合齿轮,其中轮1、2′、3′、4为主动轮,2、3、4、5为从动轮;以“—”所联两轮表示啮合,以“=”所联两轮同轴运转,它们的转速相等。
(2) 传动比i 的大小()4543321245342312354433221511i i i i z z z z z z z z n n n n n n n n n n i ⋅⋅⋅=⋅⋅⋅-=⋅⋅⋅=='''''' 上式表明,该定轴齿轮系的传动比等于各对啮合齿轮传动比的连乘积,也等于各对啮合齿轮中各从动轮齿数的连乘积与各主动轮齿数的连乘积之比,其正负号取决于轮系中外啮合齿轮的对数。

第六章轮系§6-1 轮系及其分类轮系是由一系列齿轮所组成的传动装置。
定义:这种由一系列齿轮组成的传动系统称为轮系。
它通常介于原动机和执行机构之间,把原动机的运动和动力传给执行机构。
工程实际中常用其实现变速、换向和大功率传动等,具有非常广泛的应用。
轮系的类型定轴轮系周转轮系混合轮系1、定轴轮系定义:组成轮系的所有齿轮几何轴线的位置在运转过程中均固定不变的轮系,称为定轴轮系,又称为普通轮系。
2、周转轮系定义:组成轮系的齿轮中至少有一个齿轮几何轴线的位置不固定,而是绕着其它定轴齿轮轴线回转的轮系,称为周转轮系。
周转轮系组成:2—行星轮1、3—中心轮H—系杆或行星架轮1与轮3轴线重合周转轮系的分类1. 根据周转轮系所具有的自由度数目不同(1)行星轮系周转轮系中,若将中心轮3(或1)固定,则整个轮系的自由度为1。
这种自由度为1的周转轮系称为行星轮系。
为了确定该轮系的运动,只需要给定轮系中一个构件以独立的运动规律即可。
(2)差动轮系周转轮系中,若中心轮1和3均不固定,则整个轮系的自由度为2。
这种自由度为2的周转轮系称为差动轮系。
为了使其具有确定的运动,需要两个原动件。
2. 根据周转轮系中基本构件的不同(1)2K-H型周转轮系单排式双排式双排式(2)3K型周转轮系具有三个中心轮的周转轮系一个周转轮系由行星轮、系杆和中心轮等几部分组成,其中,中心轮和系杆的运转轴线重合。
§6-2 定轴轮系的传动比1、传动比定义轮系中输入轴的角速度(或转速)与输出轴的角速度(或转速)之比,即:2、一对齿轮的传动比122112z z i ±==ωω正号:表示转向相同,用于内啮合负号:表示转向相反,用于外啮合3、传动比大小的计算举例说明传动比计算●主、从动轮转向关系的确定1、首末两轴平行,用“+”、“-”表示。
4——惰轮不改变传动比的大小,但改变轮系的转向2、首末两轴不平行用箭头表示所有主动轮齿数的乘积所有从动轮齿数的乘积定轴轮系传动比3、所有轴线都平行所有主动轮齿数的乘积所有从动轮齿数的乘积m i )1(51-==ωωm ——外啮合的次数4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴线互相平行仍可在传动比的计算结果中加上"+"、"-"号来表示主、从动轮的转向关系。