第六章 轮系及其设计(2)
- 格式:ppt
- 大小:4.68 MB
- 文档页数:69
轮系及其设计知识点轮系是指用于传递驱动力或者制动力的一组零部件,包括齿轮、皮带、链条等。
它在机械传动系统中起着关键作用,为了确保轮系的性能和可靠性,了解其设计知识点是非常重要的。
一、轮系的构成轮系通常由几个组成部分构成,包括主动轮、从动轮和传递装置。
主动轮是提供驱动力的轮子,通常由电机、发动机等提供动力。
从动轮则是受到主动轮传递的力,其作用是将驱动力传递给被驱动装置。
传递装置则是连接主动轮和从动轮的零部件,包括齿轮、链条、皮带等。
二、轮系的设计知识点1. 动力传递方式轮系的设计首先要确定采用何种动力传递方式,常见的有齿轮传动、链条传动和皮带传动。
不同的传动方式适用于不同的工况和需求,如齿轮传动适合大功率、高速传动,链条传动适合长距离传动,皮带传动适合需要减震、减噪的场合。
2. 齿轮设计齿轮是轮系中最常见的传动元件,其设计涉及到齿形、齿数、模数等参数的确定。
齿轮传动的设计要考虑传动比、传动效率、齿面强度等因素,并根据工作条件选择合适的材料和热处理工艺。
3. 链条设计链条的设计主要包括链节尺寸、链轮设计、链条应力与强度等。
在进行链条设计时需要考虑传动比、链节间隙、链条寿命等因素,同时选择合适的链轮类型和链条材料。
4. 皮带设计皮带传动的设计需要考虑皮带类型、张紧装置、传动比等因素。
选择合适的皮带类型和张紧装置可以确保传动的稳定性和可靠性,同时还需注意皮带的材料和尺寸选择。
5. 轮系配合轮系中的各个传动元件需要良好的配合才能确保传动效果。
在设计时需要注意轴距、轮毂尺寸、轴孔直径等参数的确定,以及轮系的精度要求和安装方式。
三、轮系的优化与创新除了传统的轮系设计知识点外,现代技术的发展也为轮系的优化和创新提供了新的机会。
例如,采用先进的仿真软件进行设计分析,优化齿轮的齿形和载荷分布,提高轮系的传动效率和寿命;利用新型材料和表面处理技术,改善轮系的耐磨性和耐腐蚀性;应用电子控制技术,实现轮系的智能化管理和监测。
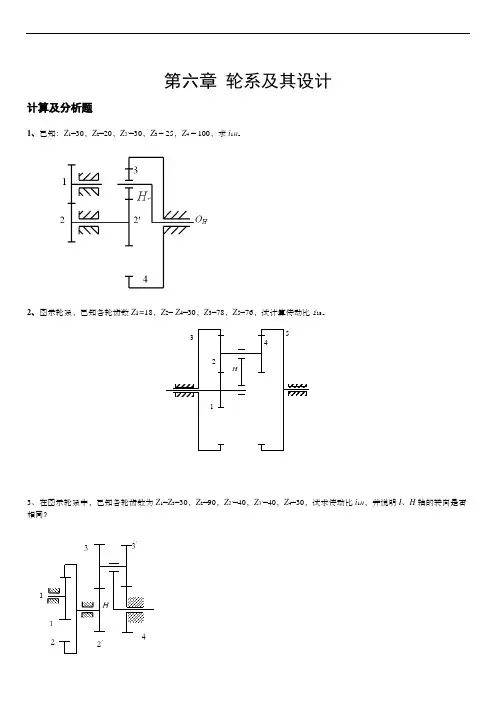
第六章轮系及其设计计算及分析题1、已知:Z1=30,Z2=20,Z2’=30,Z3 = 25,Z4 = 100,求i1H。
2、图示轮系,已知各轮齿数Z1=18,Z2= Z4=30,Z3=78,Z5=76,试计算传动比i15。
12345H3、在图示轮系中,已知各轮齿数为Z1=Z3=30,Z2=90,Z2’=40,Z3’=40,Z4=30,试求传动比i1H,并说明I、H轴的转向是否相同?1I2 2’33’4H4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否和齿轮1相同?5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。
6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。
7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求: (1)轮系的传动比i 1H 。
(2)若n 1=1000r/min ,转臂H 的转速n H =?45123H122’3453’8、已知图示轮系中各轮的齿数Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min,转向如图。
试求轮3的转速n3的大小和转向。
9、在图示轮系中,已知各轮齿数为Z1= Z3= Z4=20,Z2=40,Z5= 60,n1 = 800r/min,方向如图所示,试求n H的大小及转向。
10、在图示轮系中,已知各轮齿数为Z1=16 ,Z2=24,Z2’= 20,Z3=40,Z3’= 30,Z4= 20,Z5=70试求轮系的传动比i1H。
123H45n11232’3’4H11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=?。

第6章轮系及其设计一、思考题思6-1 轮系如何分类?周转轮系又可作几种分类?具体如何分法?答:(1)轮系根据各个齿轮的轴线相对于机架的位置是否固定可分为:①定轴轮系,各个齿轮的轴线固定;②周转轮系,至少有一个齿轮的轴线不固定。
(2)周转轮系根据自由度的不同,可分为两类:①行星轮系,自由度为1;②差动轮系,自由度为2。
思6-2 如何计算周转轮系的传动比?何谓周转轮系的转化机构?是不是周转轮系中A、B两轮的传动比?为什么?如何确定周转轮系输出轴的回转方向?答:(1)假想周转轮系的系杆固定,即给周转轮系附加一个使周转轮系转化为一个定轴轮系,通过计算定轴轮系的传动比,间接计算周转轮系中各个齿轮之间的关系。
(2)经加上附加转动后所得的机构称为原周转轮系的转化机构。
(3)不是周转轮系中A、B两轮的传动比,因为它表示A、B在转化机构中的传动比,即。
(4)周转轮系输出轴的回转方向是通过计算确定的。
思6-3 怎样从一个复合轮系中区分哪些构件组成一个周转轮系?哪些构件组成一个定轴轮系?怎样求复合轮系的传动比?答:(1)从一个复合轮系中区分周转轮系的方法如下:先找行星轮,即找出那些绕另一几何轴线转动的齿轮,那么支持行星轮的构件就是行星架。
然后循行星轮与其他齿轮啮合的线索找到两个中心轮(有时也可能只有一个中心轮),则这些行星轮、中心轮、行星架及机架便组成一个周转轮系。
(2)几个轴线固定的齿轮组成一个定轴轮系。
区分定轴轮系的方法:如果一系列互相啮合的齿轮的几何轴线都是不动的,那么这些齿轮和机架便组成一个定轴轮系。
(3)求复合轮系传动比方法:首先分清它包含哪些轮系,然后应用有关公式分别列出传动比计算式,找出各轮系之间联接构件的运动关系式,最后将上述传动比计算式及联接构件关系式联立求解,进而求出复合轮系的传动比。
思6-4 空间齿轮所组成的定轴轮系的输出轴转向如何确定?其传动比有无正负号?如何求空间齿轮所组成的周转轮系的传动比?如何确定其输出轴的转动方向?答:空间齿轮所组成的定轴轮系的输出轴转向通过画箭头的方向确定;在计算传动比时,没有正负号。