六个自由度的四旋翼飞行控制原理
- 格式:pptx
- 大小:254.77 KB
- 文档页数:7


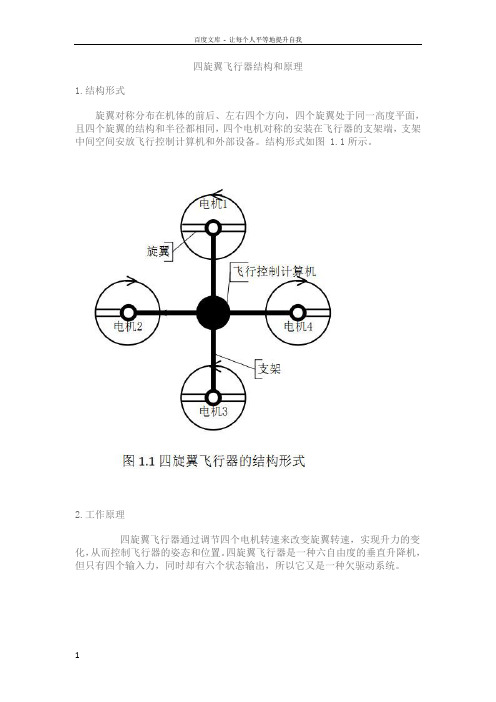
四旋翼飞行器结构和原理1.结构形式四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1 和旋翼3 逆时针旋转,旋翼2 和旋翼4 顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图1.1所示。
2、工作原理典型的传统直升机配备有一个主转子和一个尾浆。
他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。
四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。
四旋翼飞行器是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。
但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x 轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。
由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。

四旋翼无人机控制原理四旋翼无人机(Quadcopter)是一种由四个电动马达驱动的多旋翼飞行器,它通过改变电动马达的转速来控制飞行姿态和飞行方向。
在本文中,我们将探讨四旋翼无人机的控制原理,包括姿态稳定控制、飞行控制和导航控制等方面的内容。
首先,四旋翼无人机的姿态稳定控制是其飞行控制的基础。
姿态稳定控制是通过调整四个电动马达的转速,使得无人机能够保持平衡并保持所需的飞行姿态。
这一过程涉及到飞行控制器(Flight Controller)的运算和反馈控制,通过加速度计、陀螺仪和磁力计等传感器获取飞行器的姿态信息,并根据预设的飞行控制算法来调整电动马达的转速,从而实现姿态的稳定控制。
其次,飞行控制是四旋翼无人机实现飞行动作的关键。
飞行控制包括起飞、降落、悬停、前进、后退、转向等动作,通过改变四个电动马达的转速和倾斜角度,飞行控制器能够实现对无人机的飞行状态进行精确控制。
在飞行控制过程中,飞行控制器需要根据无人机的当前状态和飞行任务的要求,实时调整电动马达的输出,以实现平稳、灵活的飞行动作。
最后,导航控制是四旋翼无人机实现自主飞行和定位的重要环节。
导航控制包括位置定位、航向控制、高度控制等功能,通过全球定位系统(GPS)、气压计、光流传感器等设备获取飞行环境的信息,并通过飞行控制器进行数据处理和控制指令下发,实现无人机在空中的定位和导航。
导航控制的精准性和稳定性对于实现无人机的自主飞行和执行特定任务至关重要。
综上所述,四旋翼无人机的控制原理涉及姿态稳定控制、飞行控制和导航控制等多个方面,通过飞行控制器和传感器等设备的协同作用,实现对无人机飞行状态的实时监测和精确控制。
这些控制原理的应用,使得四旋翼无人机能够在各种环境条件下实现稳定、灵活的飞行,并具备执行特定任务的能力,如航拍、搜救、巡航等。
四旋翼无人机的控制原理不仅对于飞行器设计和制造具有重要意义,也对于无人机的应用和发展具有深远影响。
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图 1.1所示。
2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿 z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机 1的转速上升,电机 3 的转速下降(改变量大小应相等),电机 2、电机 4 的转速保持不变。
由于旋翼1 的升力上升,旋翼 3 的升力下降,产生的不平衡力矩使机身绕 y 轴旋转,同理,当电机 1 的转速下降,电机 3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图 b 的原理相同,在图 c 中,改变电机 2和电机 4的转速,保持电机1和电机 3的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。

四旋翼飞行器的工作原理
四旋翼飞行器,作为一种无人机类型,由四个电动马达驱动,每个马达带动一
个螺旋桨,通过旋转螺旋桨产生的升力和推力来实现飞行。
在四个螺旋桨的作用下,四旋翼飞行器可以进行上升、下降、前进、后退、向左、向右移动等各种飞行动作。
结构组成
四旋翼飞行器的主要结构包括机架、电机、螺旋桨、飞控以及电池等部件。
其中,电机和螺旋桨的组合负责提供飞行器的动力,飞控系统则控制着电机的转速,从而操控四旋翼飞行器的姿态和飞行方向。
工作原理
四旋翼飞行器的工作原理主要是通过控制四个电动马达的转速,来调节四个螺
旋桨产生的推力大小和方向,在空气中形成动力平衡,从而实现飞行。
当四个电动马达以相同的速度旋转时,四旋翼飞行器将悬停在空中;当电机转速有所不同时,四旋翼飞行器就会产生倾斜,从而实现前进、后退、向左或向右移动。
升力和推力
四旋翼飞行器的飞行靠的是螺旋桨产生的升力和推力。
当四个螺旋桨以适当的
速度旋转时,它们将向下推动大量的空气,产生向上的升力。
通过协调四个螺旋桨的转速和方向,四旋翼飞行器可以在空中保持平衡,实现稳定的飞行。
飞控系统
飞控系统是四旋翼飞行器的大脑,负责控制电机的转速和姿态,以实现飞行器
的稳定飞行。
飞控系统通过传感器感知四旋翼飞行器的姿态和环境信息,然后通过内置的控制算法计算出最优的控制指令,控制电机的运行状态,确保飞行器能够稳定飞行。
结语
总的来说,四旋翼飞行器的工作原理是通过控制螺旋桨产生的升力和推力来实
现飞行。
通过合理设计机身结构和配备飞控系统,四旋翼飞行器能够实现各种复杂的飞行动作,是一种十分便捷和灵活的无人机类型。

四旋翼飞行器飞行控制摘要:四旋翼飞行器是一种结构简单、飞行方式独特的垂直起降无人机。
本文主要讨论了关于四旋翼飞行器的飞行控制方法,由于该飞行器的系统是属于MIMO系统和现代飞行控制技术的发展,人们对飞机性能的要求也越来越高,但是需要提出更好的控制器使其系统的稳定性、鲁棒性、自适应性等能提高。
关键词:四旋翼飞行器,飞行控制,MIMO,鲁棒性,稳定性,自适应性1 引言四旋翼无人机是具有4个输人力和6个自由度的欠驱动动力学旋翼式直升机[1],该系统是能够准静态飞行的自主飞行器,如图1.1所示。
与传统的直升机相比,四旋翼直升机具有4个固定倾斜角的螺旋桨,从而使其结构和动力学特性得到了简化。
图1.1四旋翼飞行器的结构形式从该飞行器结构模型可以看出,推进器(1、3)、(2、4)为互相对称的两部分。
通过改变推进器转子的旋转速度,会使飞行器产生升力,引起运动[2],如图1.2所示。
因此,通过改变4个推进器的转动速度,我们可以控制飞行器的垂直起降运动。
如果相反地控制(2、4)推进器的旋转速度,会引起滚转运动;如果相反地控制(1、3)推进器的旋转速度,会引起俯仰运动;要使飞行器产生偏航运动,则需要通过共同控制(1、2)和(3、4)推进器的旋转速度。
近几十年来,随着飞机性能的不断提高,飞行控制技术发生了很大的变化,出现了主动控制技术、综合控制技术、自主飞行控制技术等先进的飞行控制技术,。
现代高性能飞机对飞行控制系统提出了更高的要求,使用古典控制理论设计先进飞机的飞行控制系统已越来越困难。
在国际上已经有很多学者研究了关于四旋翼飞行器的控制问题,而这些控制方法可以概括为三类[3]:(1)频域法,如线性二次型调节器/线性二次高斯函数/回路传递恢复方法(LQR/LQG/LTR)、定量反馈理论(QFT)方法、动态逆方法;(2)数值最优方法,如H∞方法、μ综合方法等;(3)时域法,如特征结构配置(EA)方法。
但是这些方法对四旋翼飞行器的各种姿态控制、位置控制、速度控制、定点悬停控制、协调转弯控制、自主飞行控制等控制方法设计,不能很好的提高飞行器的稳定性、自适应性和鲁棒特性等。
四旋翼飞行原理解析四旋翼无人机在现代社会中逐渐成为一种重要的飞行器。
但是,许多人对四旋翼飞行的原理仍然知之甚少。
在本文中,我将深入探讨四旋翼飞行的根本原理,以帮助读者更好地理解这项技术。
1. 四旋翼结构概述四旋翼无人机通常由四个对称分布的旋翼组成,这些旋翼通过电机叶片驱动。
每个旋翼的转速和叶片角度可以独立调节,从而实现对无人机的飞行姿态控制。
2. 升力的产生四旋翼飞行器的升力产生与传统固定翼飞行器有着明显的不同。
固定翼飞行器通过机翼形状和速度差产生升力,而四旋翼无人机则通过旋翼产生升力。
旋翼在高速旋转时,会吸入空气并产生向下的推力,从而推动整个机体向上飞行。
3. 姿态控制原理四旋翼无人机通过调节四个旋翼的转速和叶片角度来控制飞行器的姿态,包括横滚、俯仰和航向。
当需要向前飞行时,前方的两个旋翼加大推力,而后方的两个旋翼减小推力,从而使得飞行器产生向前的倾斜角度。
4. 悬停技术原理四旋翼无人机在空中保持悬停状态是其最基本的飞行技巧之一。
悬停技术的实现依赖于飞行控制系统对四个旋翼的高频率调节。
通过细微地调整旋翼的转速和叶片角度,飞行控制系统可以使飞行器在空中保持静止。
5. 起飞与降落原理四旋翼无人机的起飞和降落过程也是其飞行技术中的重要部分。
在起飞时,四个旋翼需要以足够的转速产生足够的升力来克服重力,使得飞行器脱离地面。
而在降落时,飞行器需要逐渐减小升力以平稳降落。
结语通过本文的介绍,希望读者能对四旋翼飞行的原理有一个更清晰的认识。
四旋翼无人机的飞行技术是一个综合了物理学、工程学和控制理论的复杂系统,只有深入理解其原理才能更好地驾驭这一技术。
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图1.1所示。
.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x 轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。
由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b 的原理相同,在图c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。
四旋翼飞行原理
四旋翼飞行器是一种利用四个独立旋转的螺旋桨产生升力和推力的飞行器。
其独特的设计结构使其在空中悬停、飞行、转弯等动作更加灵活和稳定。
四旋翼飞行器的飞行原理可以简单分为升力和操纵两个方面:
一、升力原理
四旋翼飞行器通过四个螺旋桨产生的气流产生升力。
每个螺旋桨的旋转产生了高速气流,使得飞行器所在的空气受到扰动,从而产生了向下的压力,这个压力就是所谓的升力。
从力学角度来说,根据伯努利定律,当气流速度增大时,气流的压强就减小,于是形成了一个向上的升力。
四个螺旋桨产生的升力共同支撑飞行器的重量,使其能够悬停在空中。
二、操纵原理
四旋翼飞行器可以通过控制四个螺旋桨的转速和方向来实现前进、后退、转弯等动作。
通过增加某个螺旋桨的转速来使得飞行器向对应的方向运动,通过降低某个螺旋桨的转速来实现停止或改变方向。
此外,四旋翼飞行器还有倾斜机身的能力,可以通过调整飞行器的机身倾斜角度来实现飞行器的横向平移和提升、下降等动作。
倾斜机身会产生较大的水平推进力,使得飞行器可以迅速移动或改变方向。
总结来说,四旋翼飞行器的飞行原理包括升力和操纵两个方面,通过螺旋桨产生的气流升力和控制螺旋桨转速和机身倾斜角度来实现飞行动作。
这种设计结构使得四旋翼飞行器在垂直起降、悬停、飞行和转弯等操作上都具有独特的优势和灵活性。