现代控制理论作业 一
- 格式:docx
- 大小:147.09 KB
- 文档页数:10
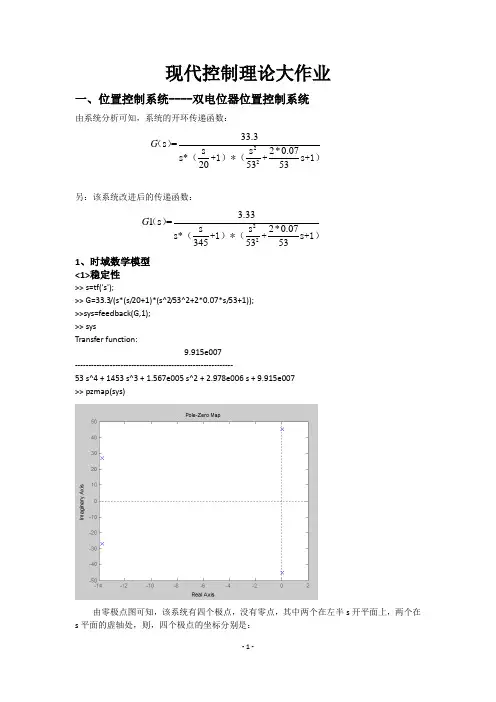
现代控制理论大作业一、位置控制系统----双电位器位置控制系统由系统分析可知,系统的开环传递函数:2233.3s =s s 2*0.07s*s 205353G()(+1)*(++1)另:该系统改进后的传递函数:223.331s =s s 2*0.07s*s 3455353G ()(+1)*(++1)1、时域数学模型<1>稳定性>> s=tf('s');>> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)); >>sys=feedback(G,1); >> sysTransfer function:9.915e007 -----------------------------------------------------------53 s^4 + 1453 s^3 + 1.567e005 s^2 + 2.978e006 s + 9.915e007>> pzmap(sys)由零极点图可知,该系统有四个极点,没有零点,其中两个在左半s 开平面上,两个在s 平面的虚轴处,则,四个极点的坐标分别是:>> p=pole(sys)p =0.0453 +45.2232i0.0453 -45.2232i-13.7553 +26.9359i-13.7553 -26.9359i系统的特征方程有的根中有两个处于s的右半平面,系统处于不稳定状态<2>稳态误差分析稳态误差分析只对稳定的系统有意义,系统(G)处于不稳定状态,所以不做分析。
改进后系统(G1)如下,求其特征方程的极点:>> s=tf('s');>> G1=3.33/(s*(s/345+1)*(s^2/53^2+2*0.07*s/53+1));>> sys2=feedback(G1,1);>>p=pole(sys2);p =1.0e+002 *-3.4492-0.0206 + 0.5258i-0.0206 - 0.5258i-0.0338可以看出,改进后的传递函数G1的四个极点都在s平面的右半开平面上,则系统G1是稳定的,故对此系统做稳态误差分析:由系统G1的开环传递函数在原点处有一个极点,故属于1型系统。
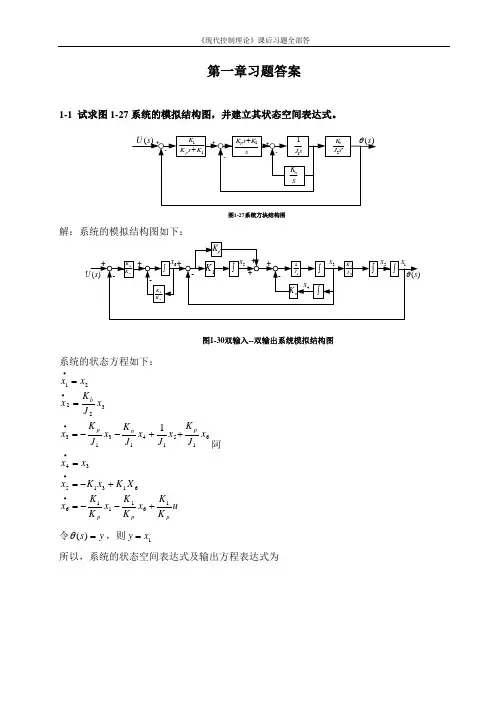
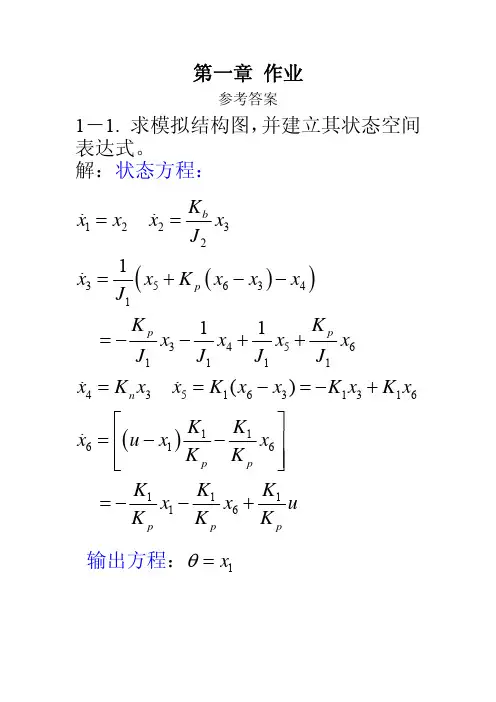
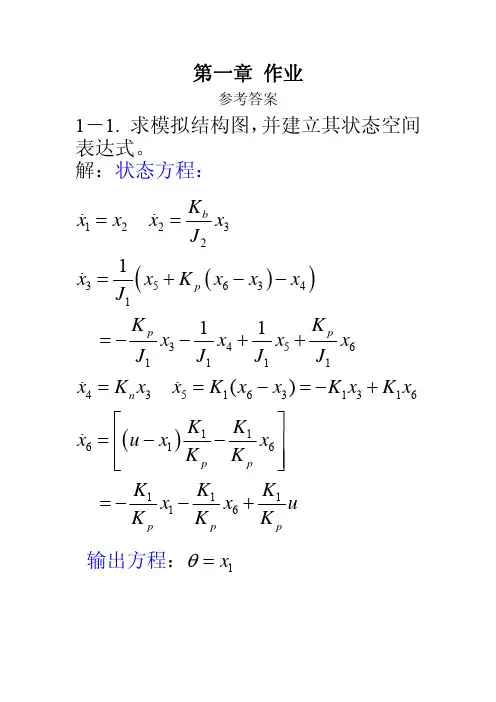
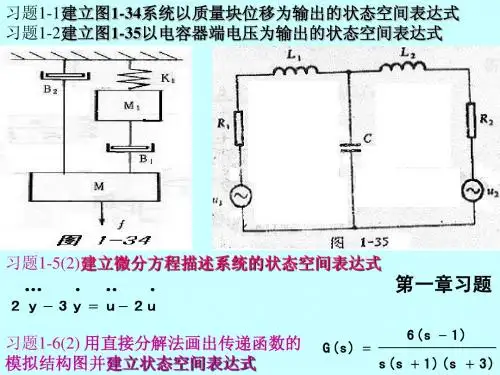
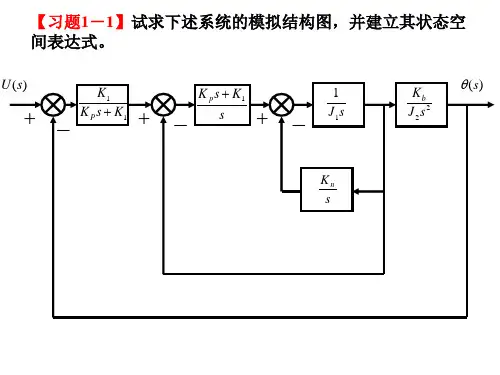
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
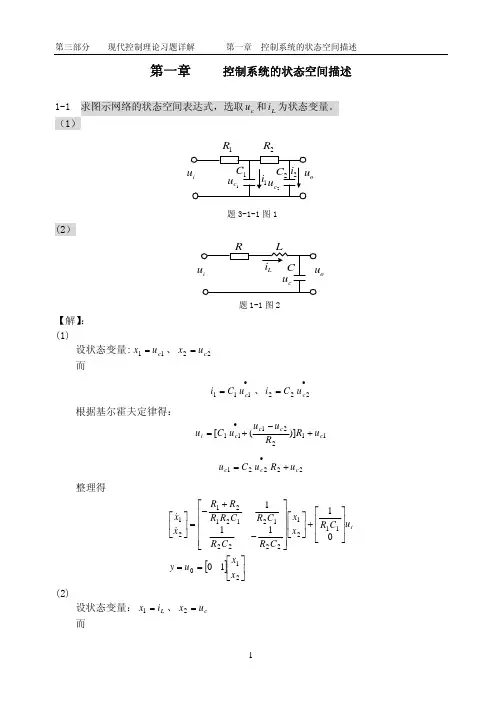
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
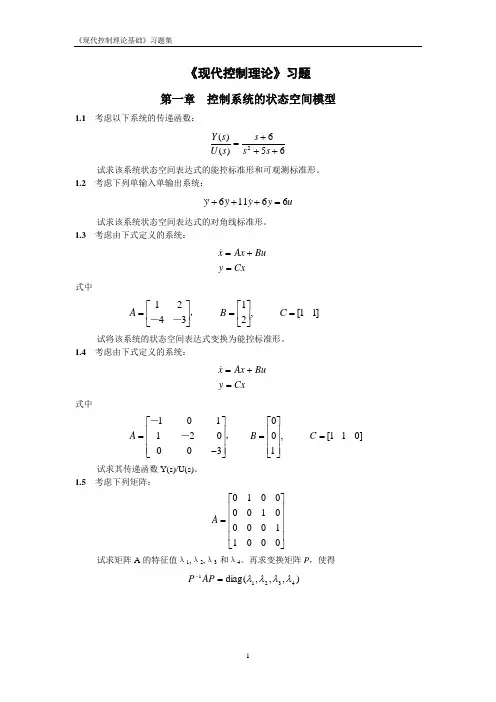
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》课后习题全部答案(最完整打印版)第⼀章习题答案1-1试求图1-27系统的模拟结构图,并建⽴其状态空间表达式。
解:系统的模拟结构图如下:系统的状态⽅程如下:阿令,则所以,系统的状态空间表达式及输出⽅程表达式为状态变量的状态⽅程,和以电阻上的电压作为输出量的输出⽅程。
解:由图,令,输出量有电路原理可知:既得写成⽮量矩阵形式为:1-4两输⼊,,两输出,的系统,其模拟结构图如图1-30所⽰,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所⽰:1-5系统的动态特性由下列微分⽅程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征⽮量(3)解:A的特征⽅程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征⽅程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两⼦系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所⽰的系统,其中⼦系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所⽰的系统,其中⼦系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分⽅程为试将其⽤离散状态空间表达式表⽰,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第⼆章习题答案2-4⽤三种⽅法计算以下矩阵指数函数。
(2)A=解:第⼀种⽅法:令则,即。
《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
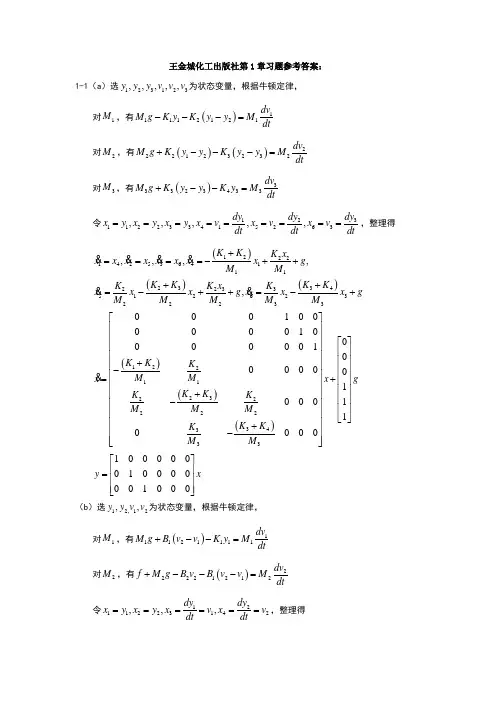
王金城化工出版社第1章习题参考答案:1-1(a )选123123,,,,,y y y v v v 为状态变量,根据牛顿定律,对1M ,有()11112121dv M g K y K y y M dt---= 对2M ,有()()222123232dv M g K y y K y y M dt+---= 对3M ,有()33323433dv M g K y y K y M dt+--= 令312112233415263,,,,,dy dy dyx y x y x y x v x v x v dt dt dt=========,整理得 ()()()122214253641112334233251262322233,,,,,K K K x x x x x x x x xg M M K K K K K x K K x x x g x x x gM M M M M +====-++++=-++=-+&&&&&&()()()1221123222223433300010000001000000010000001100010000K K K M M x x g K K K K M M M K K K M M ⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥+-⎢⎥⎢⎥⎣⎦&100000010000001000y x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(b )选12,12,,y y v v 为状态变量,根据牛顿定律,对1M ,有()11121111dv M g B v v K y M dt+--= 对2M ,有()22221212dv f M g B v B v v M dt+---= 令1211223142,,,dy dyx y x y x v x v dt dt======,整理得11113243134111,,K B Bx x x x x x x x g M M M ===--++&&&,112434222B B B fx x x g M M M +=-++& 所以状态空间描述为1111111122220010000010********K B B xx g f M M M B B B M M M ⎡⎤⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎢⎥-⎢⎥⎣⎦⎣⎦&10000100y x ⎡⎤=⎢⎥⎣⎦1-2(a )取电感电流i 和电容电压u 为状态变量,列回路方程122c rc c c u u R (i )u u R di L u u dt u du C dt R ⎧=+++⎪⎪⎪=+⎨⎪⎪=⎪⎩令12c x i,x u,y u ===()1212121212112121211r R R R R L(R R )L(R R )L(R R )xx u R C R RC(R R )C(R R )-⎡⎤⎡⎤⎢⎥⎢⎥+++⎢⎥⎢⎥=+⎢⎥⎢⎥--⎢⎥⎢⎥+++⎣⎦⎣⎦&1222121212r R RR R y x u R R R R R R ⎡⎤=--+⎢⎥+++⎣⎦ (b )选择回路电流a i 和电枢角速度ω为状态变量,有aa a a ae di u R i L K dt ω=++ 力矩平衡方程:a a d J B K i ,dt ωω+= 其中a K 为转矩常数1a a e a a a a adi R K i u dt L L L ω=--+a a K d B i dt J J ωω=-- 令12a x i ,x ,ω==有10a e a a a a R K L L L xx u K B JJ -⎡⎤-⎡⎤⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎣⎦&, []01y x ω==1-3 (1)传递函数为3221375Y(s )U(s )s s s =+++ 将传递函数中的公因子提出,于是有3123211375Y(s )s U(s )s s s ----=+++ 按梅逊公式构建系统的状态变量图能控标准形:0100001057131x x ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦&u []200y x =能观标准形:0052107001130x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& []001y =x(2)传递函数为:2332132223123Y(s )s s s U(s )s s s s----++==++++ 按梅逊公式构建系统的状态变量图能控标准形:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦& []210y x =能观标准形:003210010120x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& []001y x =(3)传递函数为:3212332123324515471547Y(s )s s s s s s U(s )s s s s s s------+++---==+++++++ 按梅逊公式构建系统的状态变量图状态空间描述为:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦& []514y x u =---+(4)①12121221212121b s b b s b s Y(s )U(s )s a s a a s a s----++==++++ 状态空间描述为:1322140101x x u x a a x ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦&&,[]21y b b x = ②22121201200111s c Z(s )c c Y(s )c s c s c s s c c ---==++++ 状态空间描述为:332144000101x x y c c x x c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦&&,301z x c = 两系统串联,得112122332121440001000001000100x x a a x x u x x c c b b x x c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦&&&& (5)由G(z)有,y(k+3)+4y(k+2)+5y(k+1)+2y(k)=u(k)令12312x (k )y(k )x (k )y(k )x (k )y(k )=⎧⎪=+⎨⎪=+⎩ 1230100100102541x (k )x(k )x (k )u(k )x (k )⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦[]123100x (k )y(k )x (k )x (k )⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(6)由G(z)有,y(k+3)+6y(k+2)+11y(k+1)+6y(k)=2u(k+2)+u(k+1)+2u(k)01001001061161x(k )x(k )u(k )⎡⎤⎡⎤⎢⎥⎢⎥+=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]123212x (k )y(k )x (k )x (k )⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦1-4 (a )化简系统结构图得系统状态空间描述:1234010000010024220025025x x x u x x ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦&&&& []0100y x =(b) 化简系统结构图得系统状态空间描述: 1112221323255223735353x x u ///x x u ////--⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦&& []110y x = []201y x =1-5 (1) 传递函数为21233212332322461246s s s s s G(s )s s s s s s ------++++==++++++能控标准形:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦& []231y x =能观标准形:006210430121x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& []001y x =(2)传递函数为24422431332132s s s G(s )s s s s -----+-+==++++能控标准形:0100001000001020301xx u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦& []1300y x =-能观标准形:00021100030103000100x x u -⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦& []0010y x =1-6(1) 24512122123123(s )(s )G(s )(s )(s )(s )s s s ++-==++++++++状态空间描述:100102010031x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦&,[]12122y x =- (2)223533313313(s )G(s )(s )(s )s s (s )+--==+++++++状态空间描述:310003010011x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦&,[]333y x =-- 1-7(1)∵31I A ()()λλλ-=++ 1213,λλ=-=-∴1003A -⎡⎤=⎢⎥-⎣⎦% 11111111,p Ap ,p λλ⎡⎤=-==⎢⎥⎣⎦,22222131,p Ap ,p λλ⎡⎤=-==⎢⎥-⎣⎦∴1111P ⎡⎤=⎢⎥-⎣⎦ 1111112P ---⎡⎤=-⎢⎥-⎣⎦11112B P B -⎡⎤==⎢⎥-⎣⎦%∴11020312x x u ⎡⎤⎢⎥-⎡⎤=+⎢⎥⎢⎥-⎣⎦⎢⎥-⎢⎥⎣⎦& (2)1230123I A ,,,λλλλ-==-=-=-∴100020003A -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦% 111111111,p Ap ,p λλ⎡⎤⎢⎥=-==-⎢⎥⎢⎥-⎣⎦,2222212212,p Ap ,p λλ⎡⎤⎢⎥⎢⎥=-==-⎢⎥⎢⎥⎢⎥⎣⎦333331333,p Ap ,p λλ⎡⎤⎢⎥=-==-⎢⎥⎢⎥⎣⎦∴1111231132P ⎡⎤⎢⎥⎢⎥=---⎢⎥⎢⎥-⎢⎥⎣⎦137272304027162B P B -⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎣⎦% ∴37271002020304000327162x x u ⎡⎤⎢⎥-⎡⎤⎢⎥⎢⎥=-+--⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎣⎦& (3)5194000000x x ⎡⎤⎢⎥⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦& 1-8 (1)∵A 为友矩阵123012I A ,,λλλλ-====∴ 110010002A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦% 101112124P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 1111B P B --⎡⎤⎢⎥==-⎢⎥⎢⎥⎣⎦% ∴100101010021x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦& (2)212331031I A ()(),,λλλλλλ-=--====310030001A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦% 120112111P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 11335234B P B --⎡⎤⎢⎥==-⎢⎥⎢⎥-⎣⎦% ∴3101330305200134x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& 1-9(1)110061031002P -⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦ 111000062300100111000152020233302100313000222AP AP -⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦% 1106203502BP B -⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦% 203640C CP ⎡⎤==⎢⎥⎣⎦%11000621102203333502022x x u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦&%% 203640y x ⎡⎤=⎢⎥⎣⎦% (2)①1111I A I P AP P P P AP P (I A)P λλλλ-----=-=-=-11I A P I A P P P I A I A λλλλ---=-=-=-∴特征值不变②1111G(s )C(sI A )B CP(sI P AP )P B ----=-=-%%%%111C P(sI P AP )P B ---⎡⎤=-⎣⎦11111C P(sI )P PP APP B C(sI A )B -----⎡⎤=-=-⎣⎦ ∴传递函数不变1-10证明:11G (s )c(sI A )b -=- 12G (s )c(sI A )b -=-∵T T TA A ,b c ,c b ===∴12T T T T T T TG (s )b (sI A )c b (sI )A c -⎡⎤=-=-⎣⎦[11T TT T T Tb(sI A )c b (sI A )c --⎤⎡⎤=-=-⎦⎣⎦11TTc(sI A )b G (s )-⎡⎤=-=⎣⎦ ∵系统为单输入单输出,11TG (s )G (S )= ∴两者传递函数相同。
现代控制理论试题与答案《现代控制理论参考答案》第一章答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘画出其模拟结构图求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A 的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数。
现代控制理论大作业要求:(1)自选一实际物理对象进行研究,建立实际物理系统的状态空间模型;(2)进行原系统的定性分析,包括稳定性、能控性、能观性分析;(3)根据系统提出的性能指标要求(如超调量、超调时间、调节时间等动态 性能指标以及稳态误差等稳态性能指标),进行原系统的仿真分析,和要求的性能指标做对比;(4)对不稳定系统且能镇定的系统,进行镇定控制;(5)对未达到性能指标要求的系统进行状态反馈控制设计,满足系统性能指 标要求;(6)设计状态观测器观测所有状态;(7)设计降阶状态观测器;(可选)(8)最优控制;(9)体会及对课程建议。
1实际物理模型:如图1所示,为一交接车前后连接振动简化模型。
设计一个调节器系统使得在无扰动的情况下,系统保持在零位置上(y1=0)。
其中m1=1,m2=2,k=36,b=0.62系统的描述方程:)()(m )()(m 212122121211y y b y y k yu y y b y y k y-+-=+-+-= 其空间状态模型为:设:。
,,,24132211y x yx y x y x ====[]⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡432121432143210001u 01003.03.018186.06.0-3636-10000100x x x x y y x x x x x x x x 3分析与求解过程:由根轨迹和特征根(a = -0.4500 + 7.3347i -0.4500 - 7.3347i -0.000 0 )知虽实根都为负数但都靠近零轴,是李雅普诺夫定义下的稳定,但存在震荡,所以把希望闭环极点配置在10-s ,10-s ,32-2-s ,322-s ===+=和把最小阶观测器希望极点配置在16-s ,15-s ==来改善系统的性能。
Harbin Institute of Technology现代控制理论基础上机实验报告之一亚微米超精密车床振动控制系统的状态空间法设计课程名称:现代控制理论院系:航天学院自动化班号:1104103作者:皮永江学号:1110410228指导教师:刘杨、井后华哈尔滨工业大学2014年6月5日1.工程背景介绍超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz左右。
2.实验目的通过本次上机实验,使同学们熟练掌握:a)控制系统机理建模b)时域性能指标与极点配置的关系c)状态反馈控制律设计d)MATLAB语言的应用3.给定的实际参数与数学建模3.0参数与物理模型机床的已知参数上图表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。
床身质量的运动方程为:(1)空气弹簧所产生的被动控制力作动器所产生的主动控制力假设空气弹簧内为绝热过程,则被动控制力可以表示为:(2)标准压力下的空气弹簧体积相对位移(被控制量)空气弹簧的参考压力参考压力下单一弹簧的面积参考压力下空气弹簧的总面积绝热系数电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。
由于系统工作在微振动状况,且在低于作动器截止频率的低频范围内,因此主动控制力可近似线性化地表示为:(3)力-电流转换系数电枢电流其中,电枢电流满足微分方程:(4)控制回路电枢电感系数控制回路电枢电阻控制回路反电动势控制电压综上得到如下方程组:3.1如果忽略非线性部分数学建模设状态变量为:得到状态方程:状态空间表达式:代入数据:那么状态空间表达式为:显然系统能控,可以采用状态反馈进行任意配置极点。
现代控制理论大作业现代控制理论大作业1.解:(1).选取状态变量为:x1=y, x2=y’,x3=y’’由题可得:a2=1 , a1=4, a0=5所以x3’=-5x1-4x2-x3+3u系统的状态方程为:x1’=x2x2’=x3x3’=-5x1-4x2-x3+3u输出方程为:y=x1将微分方程表达为矩阵形式即得其状态空间表达式:[x1’; x2’; x3’]=[0,1,0;0,0,1;-5, -4, -1][x1;x2;x3]+[0;0;3]uy=[1, 0, 0][x1;x2;x3](2).选取系统的状态变量为:x1=y-h0ux2=x1’-h1u=y’-h0u’-h1ux3=x2’-h2u=y’’-h0u’’-h1u’-h2u 由题可得:a0=0, a1=3/2, a2=0b0=-1/2, b1=0, b2=1/2, b3=0所以:[h0;h1;h2;h3]=[1 0 0 0;0 1 0 0;3/2 0 1 0;0 3/2 0 1]^-1*[0 ;1/2;0 ;-1/2]=[0;1/2;0;-5/4]取状态变量为:x1=y-h0u=yx2=x1’-h1u=x1’-1/2ux3=x2’-h2u=x2’所以该系统的状态空间表达式为:[x1’;x2’;x3’]=[0 1 0;0 0 1;0 -3/2 0][x1;x2;x3]+[0;1/2;0;-5/4]uy=[1 ,0, 0][x1;x2;x3](3)由题可得:a2=2, a1=3, a0=5;b3=5, b2=0, b1=0, b0=7所以[h0;h1;h2;h3]=[1 0 0 0;2 1 0 0;3 2 1 0;5 3 2 1]^-1*[5;0;0;7] =[5;-10;5;2]取状态变量为:x1=y-h0u=y-5ux2=x1’-h1u=x1’x3=x2’-h2u=x2’所以该系统的状态空间表达式为:[x1’;x2’;x3’;]=[0 1 0;0 0 1;-5 -3 -2][x1;x2;x3]+[5;-10;5;2]u2.经典控制理论是建立在常微分方程稳定性理论和以拉普拉斯变换为基础的根轨迹和奈奎斯特判断理论之上。
现代控制理论第一次作业1-1.由图1-1所示,可得:1311322323313112121()331()122x u x s x u x x x u x x x u x s x x x x y x x u s y x x u⎧=-⎪+=--⎧⎪⎪⎪=--=-⎪⎪⇒+⎨⎨=⎪⎪=⎪⎪=++⎩⎪⎪=++⎩ 则状态空间可表示为:()301101112000110x x uy x u--⎛⎫⎛⎫⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=+ 1-4.由101,111A B ⎛⎫⎛⎫==⎪ ⎪⎝⎭⎝⎭。
11210()()1110111(1)1s s sI A s s s s ---⎛⎫Φ=-= ⎪--⎝⎭⎛⎫ ⎪-⎪= ⎪ ⎪--⎝⎭则,110[()]t Attt e e L sI A tee --⎛⎫=-= ⎪⎝⎭, ()010()()1()t ttA t t t e eBu d u d t e e τττττττττ----⎛⎫⎛⎫=⎪ ⎪-⎝⎭⎝⎭⎰⎰,()1u τ= 则,()0()(0)()1010212tAtA t t t t t t t t x t e x e Bu d e e te e te e te τττ-=+⎛⎫⎛⎫-⎛⎫=+ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎛⎫-= ⎪⎝⎭⎰1-5.(1)极点多项式为: 由()2rank G s =, 一阶子式公分母:2(1)s s + 二阶子式公分母:22(1)s s + 极点多项式为:22(1)s s + (2)零点多项式为:二阶子式:2222212(1)()212(1)(1)s s s s s s s s --+-++=++ 零点多项式为:1(1)()2s s -+现代控制理论第二次作业1-7.系统的状态方程为:x Ax bu =+其中,01101001n A a a a -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥---⎣⎦,001b ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦。
1101111101111011000()011**1001**111n n n n n n n n n s sI A b s s s s s s s s s s s ααααααααα----------⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-=⎢⎥⎢⎥-⎢⎥⎢⎥+⎣⎦⎣⎦⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥++++⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥=⎢⎥++++⎢⎥⎣⎦1-8.反证法:设1121[]n rank b AbA b n n -=<,则存在一个非零向量α使得: 11111011[]00n n n bAbA b b Ab A b αααα---=+++=不防设110n α-≠,则,11111201211()n n n n A b b Ab A b αααα----=-+++两边同乘A ,则11111201211()n n n n A b Ab A b A b αααα---=-+++则可看出1n A b 能用12(,,)n b Ab A b -线性表出,以此类推,可得11+1n n n A b A b A b (,)均可由12(,,)n b Ab A b -线性表出,则:121[]n rank b AbA b n n -=≠ 与已知矛盾,假设不成立,所以有111[]n rank b AbA b n -=1-9.(1)解:010110001A ⎡⎤⎢⎥=--⎢⎥⎢⎥⎣⎦,011b ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,[]121C =可控性矩阵2011110111U bAbA b -⎡⎤⎢⎥⎡⎤==-⎣⎦⎢⎥⎢⎥⎣⎦,det 0U ≠,故系统可控。
现代控制理论试卷作业一.图为R-L-C电路,设u为控制量,电感L上的支路电流11121222121212010Y xUR R R RY xR R R R R R⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦+++⎢⎥⎢⎥⎣⎦⎣⎦和电容C上的电压2x为状态变量,电容C上的电压2x为输出量,试求:网络的状态方程和输出方程(注意指明参考方向)。
解:此电路没有纯电容回路,也没有纯电感电路,因有两个储能元件,故有独立变量。
以电感L上的电流和电容两端的电压为状态变量,即令:12,L ci x u x==,由基尔霍夫电压定律可得电压方程为:2221R C x x L x••+-=1121()0R x C x L x u••++-=从上述两式可解出1x•,2x•,即可得到状态空间表达式如下:121121212()()R Rx R R LRxR R C••⎡-⎡⎤⎢+⎢⎥⎢=⎢⎥⎢-⎣⎦⎢+⎣121121221212()()11()()R RxR R L R R LuxR R C R R C⎤⎡⎤⎥⎢⎥++⎡⎤⎥⎢⎥+⎢⎥⎥⎢⎥⎣⎦-⎥⎢⎥++⎦⎣⎦⎥⎦⎤⎢⎣⎡21yy=⎥⎥⎦⎤⎢⎢⎣⎡++-21121211RRRRRRR⎥⎦⎤⎢⎣⎡21xx+uRRR⎥⎥⎦⎤⎢⎢⎣⎡+212二、考虑下列系统:(a)给出这个系统状态变量的实现;(b)可以选出参数K(或a)的某个值,使得这个实现或者丧失能控性,或者丧失能观性,或者同时消失。
解:(a)模拟结构图如下:13123312312321332133x u kx xx u kxx x x axy x x•••=--=-=+-=+则可得系统的状态空间表达式:123xxx•••⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦32-⎡⎢⎢⎢⎣112311xkk x ua x-⎡⎤⎤⎡⎤⎢⎥⎥⎢⎥-+⎢⎥⎥⎢⎥⎢⎥⎥⎢⎥-⎦⎣⎦⎣⎦[2y=1]123xxx⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦(b ) 因为 3023A -⎡⎢=⎢⎢⎣ 001 k k a -⎤⎥-⎥⎥-⎦ 110b ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦302Ab -⎡⎢=⎢⎢⎣ 0013 k k a -⎤⎥-⎥⎥-⎦131001-⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦ 23023A b -⎡⎢=⎢⎢⎣ 0013 k k a -⎤⎥-⎥⎥-⎦301-⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦92k k a -⎡⎤⎢⎥=-⎢⎥⎢⎥--⎣⎦ [M b = Ab 2110A b ⎡⎢⎤=⎦⎢⎢⎣ 301- 91020k k a -⎤⎡⎥⎢-→⎥⎢⎥⎢--⎦⎣ 010 31k a -⎤⎥-⎥⎥-⎦所以:当1a =时,该系统不能控;当1a ≠时,该系统能控。
一、 已知下列系统模型,试用MATLAB 将其转换成其它三种形式的模型:1、题中给出的是系统函数的多项式型函数,需将它转换成状态空间型、零极点型和极点留数型。
(1) 多项式型转换到状态空间。
matlab 中提供的多项式到状态空间转换函数及其调用格式如下:[A,B,C,D]=tf2ss(b,a)所以转换程序为:b=[1,0,2,-2];a=[1,2,-1,-2]; [A,B,C,D]=tf2ss(b,a);g_ss=ss(A,B,C,D) 程序运行之后结果如图1所示:图1所以其状态空间模型为:A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-010001212 B=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡001 C=[]032-D=[](2) 多项式型转换成零极点型matlab 中提供的多项式到零极点转换函数及其调用格式如下:[z,p,k]=tf2zp(b,a)所以转换程序为:b=[1,0,2,-2];a=[1,2,-1,-2];[z,p,k]=tf2zp(b,a);sys=zpk([z],[p],[k]) 程序运行之后结果如图2所示:2222)(233--+-+=s s s s s s H图2所以其零极点模型为:)2)(1s )(1-()594.27709.0()7709.0s (2++++-s s s s(3)多项式转换成极点留数型matlab 中提供的多项式到极点留数转换函数及其调用格式如下:[r,p,k]=residue(b,a)所以转换程序为:b=[1,0,2,-2];a=[1,2,-1,-2];[r,p,k]=residue(b,a)程序运行之后结果如下所示:所以其极点留数型模型为:115.211667.02s 6667.4-r +-+++++-s r s r2、⎥⎦⎤⎢⎣⎡--=6221A ,⎥⎦⎤⎢⎣⎡-=23B ,[]21=C ,]0[=D题中给出的是系统函数的状态空间模型,需将它转换成多项式型、零极点型和极点留数型。
(1)状态空间转换成多项式型matlab 中提供的状态空间到多下多项式转换函数及其调用格式如下:[b,a]=ss2tf(A,B,C,D)所以转换程序为:A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[b,a]=ss2tf(A,B,C,D);sys=tf(b,a) 程序运行之后结果如下所示:所以其多项式模型为256s 2-+-s s :(2)状态空间转换成零极点型:matlab 中提供的状态空间到零极点型转换函数及其调用格式如下:[z,p,k]=ss2zp(A,B,C,D)所以转换程序为:A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[z,p,k]=ss2zp(A,B,C,D); sys=zpk([z],[p],[k]) 程序运行之后结果如下所示:(3)状态空间转换成极点留数型:先将状态空间转换成多项式型,再将多项式型转换成极点留数型。
第一步已经得出该系统的多项式型模型为:256s 2-+-s s,将它转换成极点留数型程序为:A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[b,a]=ss2tf(A,B,C,D); [r,p,k]=residue(b,a)程序运行之后结果如下所示:所以系统极点留数模型为:3723.09797.03723.5s 9797.1r +-+-+s r3、题中给出的是系统函数的零极点模型,需将它转换成多项式型、状态空间和极点留数型。
(1) 零极点型转换成多项式型matlab 中提供的零极点到多项式型转换函数及其调用格式如下:[b,a]=zp2tf(z,p,k)所以转换程序为:z=[2];p=[0,-1,-1,-1];k=[1];[b,a]=zp2tf(z,p,k);sys=tf(b,a)程序运行之后得出多项式型模型如下所示:(2) 零极点转换成状态空间matlab 中提供的零极点到状态空间型转换函数及其调用格式如下:[A,B,C,D]=zp2ss(z,p,k)3)1(2)(+-=s s s s H所以转换程序为:z=[2];p=[0,-1,-1,-1];k=[1];[A,B,C,D]=zp2ss(z,p,k);g_ss=ss(A,B,C,D) 程序运行之后结果如下所示:所以其状态空间模型为:A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01001-2-2-100010001- B=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0001 C=[]1000D=[](3) 零极点转换成极点留数型需先将零极点转换成多项式型,再将多项式型转换成极点留数型,转换程序如下:z=[2];p=[0,-1,-1,-1];k=[1];[b,a]=zp2tf(z,p,k);[r,p,k]=residue(b,a) 程序运行之后结果如下所示:r = 2.0000 2.0000 3.0000 -2.0000p = -1.0000 -1.0000 -1.0000 0k = []所以系统极点留数型模型为:ss r s r s r H 2r 1-31212)s (-+++-++-+=二、状态方程的解1、 设系统的微分方程为: (a) 写出系统的状态方程和输出方程。
(b) 若输入信号)(5)(f t t e t ε-=,初始状态1)0()0()0(321===x x x ,试求状态变量)(),(),(321t x t x t x 和输出y(t)的零输入响应、零状态响应和全响应。
(a)首先将微分方程装换多项式型传递函数,再将其转换成成状态空间模型,转换程序如下:num=[4 10];den=[1 8 19 12];sys1=tf(num,den)sys=ss(sys1)程序运行后结果如下: a = x1 x2 x3 x1 -8 -4.75 -1.5 x2 4 0 0 x3 0 2 0b = u1 x1 2 x2 0 x3 0c = x1 x2 x3 y1 0 0.5 0.625d = u1 y1 0所以其状态方程为:f x x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0020200045.175.48x 321 输出方程为:x y ]625.05.00[= (b)在MATLAB 环境下编写以下程序:t=0:0.01:15;A=[-8 -4.75 -1.5;4 0 0;0 2 0]; B=[2;0;0];C=[0 0.5 0.525];D=[0]; zi=[1 1 1]; %初始条件 f=5*exp(-t); sys=ss(A,B,C,D)[y,t,x]=lsim(sys,f,t,zi) %计算全响应 f=zeros(1,length(t)); %零输入为零 yzi=lsim(sys,f,t,zi); %计算零输入响应)(10)(4)(12)(19)(8)(t f t f t y t y t y t y +'=+'+''+'''f=5*exp(-t);zi=[0 0 0]; %令初始条件为零yzs=lsim(sys,f,t,zi); %计算零状态响应figure(1)plot(t,x(:,1),'-',t,x(:,2),'-.',t,x(:,3),'-..','linewidth',2)legend('x(1)','x(2)','x(3)') %显示图例title('状态变量波形')xlabel('t(sec)')figure(2)plot(t,y,'-',t,yzi,'-',t,yzs,':','linewidth',2)legend('y','yzi','yzs')title('系统响应,零输入相应,零状态响应')xlabel('t,(sec)')程序运行后结果如下:状态变量波形t(sec)图1 初始状态下状态变量波形图2 输出y(t)的零输入响应、零状态响应和全响应曲线2、设系统函数为(a) 写出系统的状态方程和输出方程(b) 若输入信号)(e 3)()(f2t t t e t t εε-+-=,初始状态1)0(1=x 0)0(2=x ,1)0(3=x ,2)0(4=x 试求状态变量)(),(),(321t x t x t x ,)(4t x 和输出y(t)的零输入响应、零状态响应和全响应。
(a)首先将零极点型换成状态空间模型,转换程序如下:z=[2];p=[0,-1,-1,-1];k=[1];[A,B,C,D]=zp2ss(z,p,k)程序运行后结果如下:A = -1 0 0 0 1 0 0 0 1 -2 -2 -1 0 0 1 0B = 1 0 0 0C =0 0 0 1 D = 000.511.522.5t,(sec)系统响应,零输入相应,零状态响应3)1(2)(+-=s s s s H所以系统状态方程为:u x x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡00010100122100010001x 4321 输出方程为:[]x y 1000= (b)在MATLAB 环境下编写以下程序:t=0:0.01:15;A=[-1 0 0 0;1 0 0 0;1 -2 -2 -1;0 0 1 0]; B=[1;0;0;0];C=[0 0 0 1];D=[0]; zi=[1 0 1 2]; %初始条件 f=exp(-t)+3*exp(-2*t); sys=ss(A,B,C,D)[y,t,x]=lsim(sys,f,t,zi) %计算全响应 f=zeros(1,length(t)); %零输入为零 yzi=lsim(sys,f,t,zi); %计算零输入响应 f=exp(-t)+3*exp(-2*t);zi=[0 0 0 0]; %令初始条件为零 yzs=lsim(sys,f,t,zi); %计算零状态响应 figure(1)plot(t,x(:,1),'-',t,x(:,2),'-.',t,x(:,3),'--',t,x(:,4),':','linewidth',2) legend('x(1)','x(2)','x(3)','x(4)') %显示图例 title('状态变量波形') xlabel('t(sec)') figure(2)plot(t,y,'-',t,yzi,'-',t,yzs,':','linewidth',2) legend('y','yzi','yzs')title('系统响应,零输入相应,零状态响应') xlabel('t,(sec)')程序运行之后得出以下结果:图3 初始状态下状态变量波形图2 输出y(t)的零输入响应、零状态响应和全响应曲线-8-6-4-2024t(sec)状态变量波形-8-6-4-2024t,(sec)系统响应,零输入相应,零状态响应。